
Россия, Джанкой


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 17.05.2024 21:59

Турчин Дмитрий Викторович
педагог-библиотекарь
35 лет
Местоположение
Специализация
Библиотечка "Роботы и робототехника"
Категория:
Технология
26.03.2024 12:33

Просмотр содержимого документа
«Библиотечка "Роботы и робототехника"»
Роботы и робототехника
Во все времена люди пытались представить себе будущее. Писатели-фантасты рассказывали об удивительных городах, машинах, летательных аппаратах и роботах. Подумайте, что такое робот. Что он может делать?
Как использование роботов может изменить жизнь людей?
Почему на протяжении многих веков люди пытаются создать механическое устройство, подобное себе?
Из этого параграфа вы узнаете:
1. Что такое робот? 2. Чем робот отличается от автоматического устройства? 3. Почему на производстве не применяют человекоподобных роботов? 4. Перечислите основные виды работ, в которых роботы могут заменить человека. 5. Какое устройство управляет всеми действиями робота? Для чего нужно большое количество разнообразных контроллеров?
Робот — это автоматическое устройство, автомат. Однако не всякий авто мат следует называть роботом. Как и любое автоматическое устройство, робот действует по заданной программе. Робота отличает то, что он под управлением оператора (с помощью датчиков) получает информацию о внешнем мире и может корректировать действия в зависимости от ситуации. По функциям датчики роботов похожи на органы чувств человека или других живых организмов. Они могут реагировать на прикосновение, световой или звуковой сигнал или несколько сигналов одновременно.
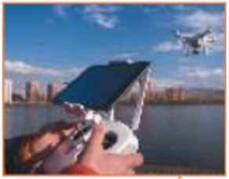
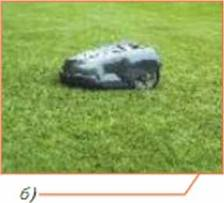
Коррекция функций робота может происходить под воздействием оператора, который управляет роботом (рис. 15.1, а). Современные компьютеры позволяют сделать полностью автономных роботов. Такие роботы действуют по заданной программе и корректируют свои функции применительно к изменяющимся условиям (рис. 15.1, б).
|
|
|
| Рис. 15.1, а | Рис. 15.1, б |
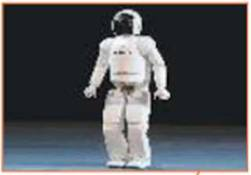
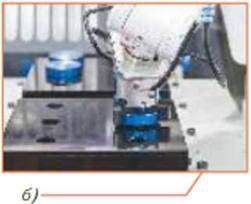
Часто роботами называют только человекоподобные устройства (рис. 15.2, а). Однако в промышленности и других сферах труда чаще всего применяют роботов, не похожих на человека (рис. 15.2, б).
Создавать человекоподобных роботов (роботов-андроидов) для производства нецелесообразно из экономических соображений. Такие роботы будут очень дороги, что приведёт к значительному росту себестоимости продукции, а значит, и её цены.
|
|
|
| Рис. 15.2, а | Рис. 15.2, б |
Если рассмотреть управляемый с подобного пульта и тоже по радиоканалу квадрокоптер, то его можно считать полноценным роботом (рис. 11.18).
Это связано с тем, что на борту квадрокоптера стоит специальное устройство — чип-микропроцессор, в нём по заранее разработанной и загруженной в запоминающее устройство программе идёт
анализ полученных команд, учитывается направление и скорость ветра, появление препятствия, рассчитываются изменения скорости вращения моторов.
Подумаем, когда становится роботом пылесос. Обычный включённый пылесос (рис. 11.19) будет долго шуметь, стоя на одном месте, если его никто никуда не передвинет.
Но робот-пылесос в виде таблетки (рис. 11.20) сам передвигается от одной стены комнаты до другой, причём таким образом, что проходит над каждым участком пола не более чем 2—3 раза. Как это он делает? Откуда робот-пылесос берёт координаты и как запоминает свой путь?
Оказывается, что, как и в случае с квадрокоптером, в роботе-пылесосе есть специальные датчики. Они установлены на колёсах, и они называются энкодерами. Эти датчики собирают информацию о движении пылесоса относительно препятствий в комнате. Полученная таким образом информация обрабатывается специальным устройством — центральным процессором, в который заложена программа анализа передвижения пылесоса. Робот ползёт и как будто мысленно «закрашивает» часть комнаты, где он уже побывал, а далее, достигнув стенки и развернувшись, он прокладывает маршрут по ещё «не закрашенному» пути. И так продолжается до тех пор, пока он не «закрасит» своим следом всё свободное пространство либо пока не кончится заряд батареи на его борту.
В роботе, как и в любом компьютере, есть центральный процессор (чип), постоянная память и оперативная память.
Центральный процессор — это «мозг» компьютера, устройство для обработки информации.
Когда робот выключен, загруженная в него программа хранится в постоянном запоминающем устройстве (ПЗУ).
Как только на робот подаётся питание, процессор отправляет программу из постоянной в оперативную память и запускает выполнение программы — робот начинает действовать.
Теперь мы можем определить, чем же отличаются роботы от простых механических устройств или радиоуправляемых игрушек. Итак, в роботах должно быть устройство, которое позволит ему «думать» и каким-то образом «общаться» с человеком.
Такое устройство, которое используется для управления в электронике и вычислительной технике, получило название «контроллер». Контроллер — это микросхема, внутри которой находится настоящий компьютер (рис. 11.23).
В контроллере есть всё, что необходимо для самостоятельной работы: процессор, оперативная и постоянная память, порты ввода и вывода, таймеры, многое другое.
Во все планшеты, телефоны и другие гаджеты встроены контроллеры. Контроллеры отличаются друг от друга раз мерами, мощностью, которая определяет, какое количество операций может выполняться, рабочей частотой (скоростью выполнения операций).
Главная часть любого контроллера — микропроцессор.
Это арифметико-логическое устройство, которое производит арифметические и логические операции с двоичными числами (эту тему рассмотрим в старших классах, когда будем изучать команды, которые понимают роботы).
П риставка «микро» означает маленький. Сейчас процессор такой маленький, что даже в керамическом корпусе имеет размер, сравнимый с размером рисового зёрнышка, и, несмотря на то что он состоит из огромного количества электронных компонентов, микропроцессор умещается на кончике пальца (рис. 11.24).
риставка «микро» означает маленький. Сейчас процессор такой маленький, что даже в керамическом корпусе имеет размер, сравнимый с размером рисового зёрнышка, и, несмотря на то что он состоит из огромного количества электронных компонентов, микропроцессор умещается на кончике пальца (рис. 11.24).
Микропроцессоры отличаются друг от друга внешним видом (корпусом и количеством ножек) и функциональны ми возможностями. Один и тот же процессор может быть в корпусе, который нужно припаивать к плате, а может — в корпусе, который просто нужно вставить в специальный разъём на плате. Процессор может выполнять различные за дачи, например управлять освещением у вас в комнате: по хлопку в ладоши включать свет, а по свистку выключать.












Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ

