








© 2018, Рыжкова Марина Николаевна 2045 36


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 21.04.2024 13:56

Рыжкова Марина Николаевна
учитель начальных классов
6 лет
Проект: Марсоход (презентация)
Категория:
Начальные классы
02.11.2018 08:59

Просмотр содержимого документа
«Проект: Марсоход (презентация)»
Робототехника в Космосе
ПРОЕКТ «МАРСОХОД»
Подготовил Сизых Артем 4 «Г» класс

ИССЛЕДОВАТЕЛЬСКАЯ ЧАСТЬ: ОСОБЕННОСТИ КОНСТРУКЦИИ CURIOSITY
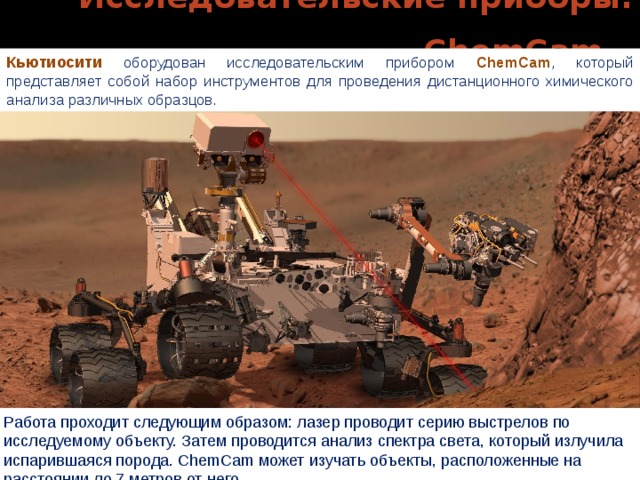
Исследовательские приборы: ChemCam
Кьютиосити оборудован исследовательским прибором ChemCam , который представляет собой набор инструментов для проведения дистанционного химического анализа различных образцов.
Работа проходит следующим образом: лазер проводит серию выстрелов по исследуемому объекту. Затем проводится анализ спектра света, который излучила испарившаяся порода. ChemCam может изучать объекты, расположенные на расстоянии до 7 метров от него.

КЬЮРИОСИТИ (англ. Curiosity)
Кьюриосити — планетоход, созданный NASA, передвигающийся в настоящее время по поверхности Марса. "Голова" марсохода имеет высоту 2,1 м над уровнем поверхности. На этой мачте установлены два основных прибора: это стерео "глаза" (камеры), для проведения стерео съемки поверхности Марса и ChemCam лазер, который испаряет вещество горных пород на глубину до 9 метров, что позволит определить их химический состав.
Мягкая посадка марсохода на Марс при спуске
на поверхность планеты из космоса
осуществлена при помощи
спускаемого аппарата.
В качестве источника питания выступает
батарея на основе плутония 238
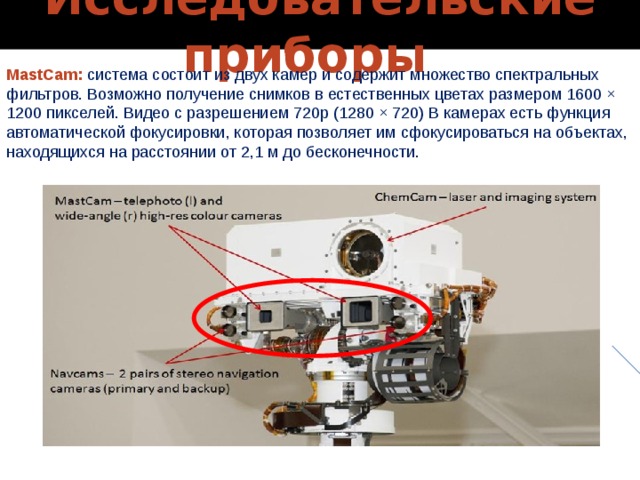
Исследовательские приборы
MastCam: система состоит из двух камер и содержит множество спектральных фильтров. Возможно получение снимков в естественных цветах размером 1600 × 1200 пикселей. Видео с разрешением 720p (1280 × 720) В камерах есть функция автоматической фокусировки, которая позволяет им сфокусироваться на объектах, находящихся на расстоянии от 2,1 м до бесконечности.

Исследовательские приборы
Манипулятор: на ровере установлен трёхсуставный манипулятор длиной 2,1 м, на котором смонтированы 5 приборов общей массой около 30 кг. Они смонтированы на конце манипулятора в крестовидной башне-турели (turret), способной поворачиваться на 350 градусов. Диаметр башни с инструментами составляет около 60 см. Во время движения манипулятор складывается
Два прибора, APXS и MAHLI , являются контактными ( in-situ ) инструментами. Остальные 3 прибора — ударная дрель, щётка (brush) и механизм для забора (зачерпывания — scooping) и просеивания образцов грунта — выполняют функции добычи и приготовления материала (образцов) для исследования. Дрель имеет 2 запасных бура. Она способна делать в камне отверстия диаметром 1,6 см и глубиной 5 см. Добытые манипулятором образцы могут также исследоваться приборами SAM и CheMin , расположенными в передней части корпуса ровера

ШАССИ МАРСОХОДА
Шасси – предназначены для обеспечения марсоходу максимальной проходимости и маневренности на поверхности далекой планеты.
Всего у марсоходов Спирит, Опотьюнитии и Кьюриосити было по шесть колес, каждое из которых имеет возможность свободно вращаться и поворачивать.

Выводы:
Марсоход имеет в своей конструкции основные элементы:
Шасси , призванные обеспечить максимальную проходимость,
Манипулятор , необходимый для проведения исследований,
Исследовательские приборы и камеры – необходимые для проведения исследований и навигации.
Основываясь на полученной информации я решил построить проект марсохода.
Исследовательские приборы и камеры
Манипулятор
Шасси

ПРАКТИЧЕСКАЯ ЧАСТЬ: МОЙ МАРСОХОД ADVENTURE

МОЙ ПРОЕКТ МАРСОХОДА ADVENTURE
В качестве базы для постройки модели
Марсохода я взял робототехническй
конструктор Lego Mindstorms

МОЙ ПРОЕКТ МАРСОХОДА ADVENTURE
На основе собранной в ходе исследований информации я построил модель марсохода и назвал его ADVENTURE.
Мой марсоход также имеет в своей конструкции основные элементы:
- Шасси, призванные обеспечить максимальную проходимость,
- Манипулятор, необходимый для проведения исследований,
- Исследовательские приборы и камеры – необходимые для проведения исследований и навигации.

МОЙ ПРОЕКТ МАРСОХОДА ADVENTURE
Используя программную среду Lego Mindstorms EV3 я запрограммировал марсоход
На выполнение программы самостоятельного движения – позволяющей ему при помощи датчиков избегать столкновения с препятствиями,
а также в автоматическом режиме управляющей манипулятором для моделирования бурения исследуемой поверхности.

ПРИЛОЖЕНИЯ

Успешные миссии марсоходов
Марс ПрОП-М
Соджорнер
Аппарат Марс-2
Аппарат Марс-3

Идентичные марсоходы программы Mars Exploration Rover, НАСА:
Оппортьюнити (англ. Opportunity) - с января 2004 года. На 26 января 2016 года в рабочем состоянии.
Спирит (англ. Spirit) - с 4 января 2004 года по22 марта 2010 года

МАРСОХОДЫ В СРАВНЕНИИ ДРУГ ДРУГОМ
СПАСБО ЗА ВНИМАНИЕ!
Сизых Артем Школа № 16 Одинцово, 4Г класс.
Научный руководитель: Марина Николаевна Рыжкова






Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ


