
ЛНР, Стаханов


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 16.09.2024 16:52

Приз Ольга Николаевна
Преподаватель профессионально-теоретической подготовки компьютерных дициплин
44 года
Местоположение
Специализация
МЕТОДИЧЕСКАЯ РАЗРАБОТКА по дисциплине: «Информационные технологии» профессия: «Электрогазосварщик на автоматических и полуавтоматических машинах. Контролер сварочных работ» «РОБОТИЗАЦИЯ И АВТОМАТИЗАЦИЯ ПРОИЗВОДСТВА»
Категория:
Всем учителям
23.08.2017 08:23

Просмотр содержимого документа
«МЕТОДИЧЕСКАЯ РАЗРАБОТКА по дисциплине: «Информационные технологии» профессия: «Электрогазосварщик на автоматических и полуавтоматических машинах. Контролер сварочных работ» «РОБОТИЗАЦИЯ И АВТОМАТИЗАЦИЯ ПРОИЗВОДСТВА»»

МЕТОДИЧЕСКАЯ РАЗРАБОТКА
по дисциплине: «Информационные технологии»
профессия: «Электрогазосварщик на автоматических и полуавтоматических машинах. Контролер сварочных работ»
«РОБОТИЗАЦИЯ И АВТОМАТИЗАЦИЯ ПРОИЗВОДСТВА»
Разработала
преподаватель специальных дисциплин Приз Ольга Николаевна
Стаханов - 2014
Тема: «Роботизация и автоматизация производства»
Цели
Учебные:
• Формирование знаний в области робототехники.
• Развитие способностей находить и принимать решения в
различных ситуациях.
• Развитие навыков определения различных типов промышленных роботов.
Воспитательные:
• Формирование производственной грамотности.
• Пополнение знаний об автоматизации и роботизации производства.
• Формирование чувства ответственности, коллективизма, сотворчества, самореализации.
Развивающие:
• Развитие познавательного интереса через вовлечение учащихся в творческую деятельность.
Тип урока: обобщения знаний и умений.
Форма проведения урока: смотр знаний.
Метод:
Оснащение урока: Компьютер, экран, проектор (презентация), мини-конспект, карточки заданий, видеоролик.
ХОД УРОКА.
1. Организационный момент.
сообщение цели и задачи урока,
объявление условия проведения игры,
представляет жюри.
учащиеся выбирают места за игровыми столами.
Примечание:
перед каждым конкурсом ставится цель, по окончании конкурса подводят итоги, исправляют ошибки и объясняют их;
жюри оценивает конкурсы.
2. Ход урока-смотра знаний
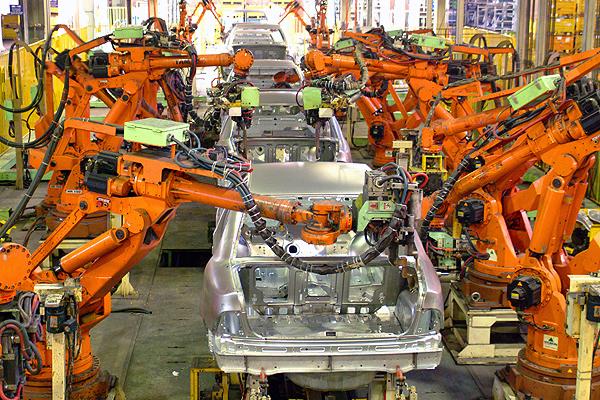
Просмотр видеоролика «Из чего это сделано. Промышленные роботы»
КОНКУРС «ТЕРМИНЫ»
Условия: преподаватель читает определения, учащиеся записывают в тетради. Затем по 1 человеку от команды (группа разделена на две команды) подходят к членам жюри, те проверяют их работы, исправляют ошибки и ставят оценки. Ребята имеют эталон ответа, проверяют работы своей команды. (Приложение1)
ЗАДАНИЯ:
Автомат, выполняющий сложные операции, заменяющие осмысленные человеческие действия (Робот).
Механизм, выполняющий под управлением оператора действия (манипуляции), аналогичные действиям руки человека (Манипулятор).
Технические устройства, связанные с изготовлением и применением роботов (робототехника).
Орудие действия, всякое механическое приспособление для увеличения силы, скорости движения; вообще, все, устроенное с целью экономизирования сил человека или животных (Машина).
Применение технических средств, экономико-математических методов и систем управления, освобождающих человека частично или полностью от непосредственного участия в процессах получения, преобразования, передачи и использования энергии, материалов…(автоматизация).
Устройство (совокупность устройств), выполняющее по заданной программе без непосредственного участия человека все операции в процессах получения, преобразования, передачи и распределения (использования) …(автомат).
Совокупность предметов, действий, свойств или явлений, составляющих одно целое (комплекс).
Важнейшая комплексная отрасль обрабатывающей промышленности, включающая: станкостроение, приборостроение, энергетическое, металлургическое, химическое, сельскохозяйственное … (машиностроение)
Процесс превращения ресурсов в готовую продукцию (производство).
Развитие автоматизации производства на основе промышленных роботов (Роботизация)
КОНКУРС « С ТОЧНОСТЬЮ ДО…»
Условия: баллы будут набирать те игроки, которые быстрее других заполнят таблицу: (использование Приложения 2 Мини-конспекта)
Задания:
| № | Достоинства роботов | Недостатки роботов |
| 1 |
|
|
| 2 |
|
|
| 3 |
|
|
| 4 |
|
|
| … |
|
|
Оценивание за каждый правильный ответ 1 балл.
|
|
|
|
|
|
| |
Условия:
команды разыгрывают модели роботов:
манипулятор,
сварочный робот,
робот для резки,
робот покрасочный,
сборочный робот.
Члены команды, не занятые в модели, комментируют выступление своей команды.
Условия: команды получают тексты, в которых допущены ошибки. В течение 1-2 мин. в группах идет работа по выявлению ошибок, затем игрок читает текст, с исправленными ошибками, комментируя их. Каждый правильный ответ 1 балл – максимальное количество баллов - 5. (Приложение 3)
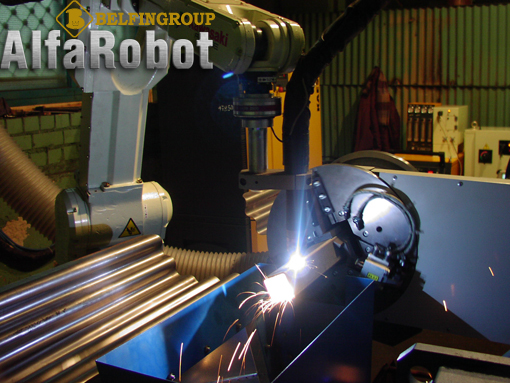
ТЕКСТ «СВАРОЧНЫЙ РОБОТ»
Сварочные роботы – автоматические (автоматизированные) устройства—полуавтоматы (манипуляторы), приспособленные для выполнения сварочных работ.
Основные задачи: автоматизация этого подготовительного (технологического) процесса, вывод из рабочей зоны человека, повышение производительности и снижение себестоимости производства.
Конструктивно сварочный робот состоит из основания (подвижного или стационарного), или базы, руки (набора звеньев) и рабочего инструмента (звена). Помимо этого в устройстве используются различные датчики (определения положения заготовки и рабочего инструмента), система управления (АСУ), вспомогательные приспособления (трубопроводы, электрическая проводка и т.п.).
Рабочий инструмент делается стационарным (съемным). Робот функционирует по заранее заданной программе, при необходимости перепрограммируется (за исключением автооператоров). Одним из основных классификационных признаков сварочных роботов является количество степеней свободы их руки.
Чем больше степеней свободы (подвижности) тем сложнее операции может выполнять машина. Прообразом устройства стала человеческая нога (рука), имеющая 37 подвижностей. Большинству сварочных роботов такое количество не требуется, в виду ограниченности числа выполняемых операций. Стандартом стало 3-8 степеней свободы.
Сварочные роботы могут быть стандартными или изготавливаться под конкретный заказ, с учетом технических требований покупателя. Второй тип оборудования дороже, т.к. его производство подразумевает выполнение предварительных проектных и расчетных работ, но позволяет более полно учитывать конкретные производственные условия.
ТЕКСТ «РОБОТЫ ДЛЯ РЕЗКИ»
Роботы для резки – автоматические (автоматизированные) устройства для окраски (раскроя) листового металла, а также изделий из него (в том числе сложных конфигураций). Применение роботов для резки позволяет добиваться более высокого качества реза, избежать деформаций вблизи него, повысить производительность, вывести рабочего из опасной зоны.
Рабочим инструментом может быть плазменная (чаще всего), газовая горелка или лазер. Конструктивно машина (робот) состоит из съемного рабочего инструмента, ноги (руки) из нескольких звеньев и основания. Основание может быть стационарным или подвижным (с движением по направляющим рельсам). Звенья руки соединены друг с другом приводами.
Работа устройства полностью автоматизирована, управление осуществляется с помощью перепрограммируемого контроллера. Сам робот для резки металла при необходимости включается в общую автоматизированную производственную линию, управляемую единой АСУ.
Окраска (Резка) металла осуществляется по прямым и кривым линиям (дугам). Для перехода на выполнение реза новой формы требуется перепрограммировать контроллер.
Роботы для резки металла изготавливаются в стандартной (универсальной) комплектации, либо под индивидуальный заказ, с учетом особых технических требований и условий будущей работы.
Условия: каждой команде выдаются по 3 ребуса, нужно как можно быстрее их отгадать. ( см. Приложение 5) Каждый ребус 1 балл.
Подведение итогов урока
Учитель вместе с членами жюри подсчитывает баллы, набранные командами, дает оценку выступлениям ребят, подводит итог урока, благодарит за участие.
Домашнее задание.
Приложение 1
Автомат, выполняющий сложные операции, заменяющие осмысленные человеческие действия ________________________________________
Механизм, выполняющий под управлением оператора действия, аналогичные действиям руки человека ___________________________
Технические устройства, связанные с изготовлением и применением роботов ____________________________________________________
Орудие действия, всякое механическое приспособление для увеличения силы, скорости движения; вообще, все, устроенное с целью экономии сил человека или животных ____________________________
Применение технических средств, экономико-математических методов и систем управления, освобождающих человека частично или полностью от непосредственного участия в процессах получения, преобразования, передачи и использования энергии, материалов_________________________________________________
Устройство (совокупность устройств), выполняющее по заданной программе без непосредственного участия человека все операции в процессах получения, преобразования, передачи и распределения (использования) ____________________________________________
Совокупность предметов, действий, свойств или явлений, составляющих одно целое _____________________________________
Важнейшая комплексная отрасль обрабатывающей промышленности, включающая: станкостроение, приборостроение, энергетическое, металлургическое______________________________________________
Процесс превращения ресурсов в готовую продукцию ___________________________________________________________
Развитие автоматизации производства на основе промышленных роботов ______________________________________________________
Приложение 2 Мини-конспект
МЕХАНИЗАЦИЯ И АВТОМАТИЗАЦИЯ СВАРОЧНОГО ПРОИЗВОДСТВА
Одним из основных способов интенсификации сварочных работ и улучшения их качества являются механизация и автоматизация сварочного производства там, где это возможно и экономически обосновано. Основной площадкой для внедрения сварочных автоматов, сварочных роботов, станков и машинок для производства сварочных работ, является производство с большими объемами сварки. Это часто повторяющиеся операции на средних и малых конструкциях, строительство и возведение больших конструкций и механизмов, имеющих в составе протяжённые швы. В первом случае счет может идти на тысячи деталей в смену. Во втором - тысячи и сотни тысяч тонн сварных конструкций. Кроме двух первых причин - массовости и существенного объема сварных работ, может превалировать и третья - необходимость поддержания стабильно высокого качества сварки и жестких технических требований к сварным швам в составе ответсвенных конструкций.
Некоторые конструкции впечатляют: корабли, хранилища нефтепродуктов и газа, мосты, буровые платформы и пр. Сроки их возведения, аспекты экономики и дефицит квалифицированных сварщиков ускоряют научно-технический прогресс. Все больше внедряется сварочных автоматов, квантователей, манипуляторов, сварочных тракторов и средств малой механизации.
ПРЕИМУЩЕСТВА ИСПОЛЬЗОВАНИЯ СВАРОЧНОГО РОБОТА
Всем известно, что ручная электродуговая сварка - достаточно сложный и ответственный процесс, который требует от человека особых знаний и большого опыта.
При осуществлении ручной сварки, специалист (сварщик) должен обладать определенными навыками для выполнения сразу нескольких операций.
К примеру, электрод, необходимо перемещать вдоль оси для поддержания постоянной длины дуги и одновременно вдоль шва для заполнения его расплавленным металлом. Кроме того, при сварке широкого шва, требуется еще и движение электрода поперек шва, чтобы полностью заполнить его металлом.
Такая тяжелая и монотонная работа, в значительной степени зависит от человеческого фактора.
С этими и другими, непростыми задачами с блеском справится СВАРОЧНЫЙ РОБОТ.
Робот в комплекте со сварочным оборудованием для автоматизированной сварки, является сварщиком высочайшей квалификации, так как роботизированная сварка осуществляется с высокой точностью и постоянной сварочной скоростью, а так же с необходимыми сварочными параметрами и возможностью изменения этих параметров непосредственно во время сварки.
Контроллер сварочного робота обеспечивает важнейшие функции для задания параметров сварочного процесса. Для каждого сварного шва, в зависимости от его длины и толщины детали, вида шва и расположения в пространстве могут быть установлены и модифицированы параметры:
- задание последовательности начала сварки;
- задание сварочных состояний в течение времени от образования дуги до начала сварки;
- задание времени подачи защитного газа до начала сварки и после окончания сварочного процесса;
- задание различных видов данных, для автоматического освобождения проволоки при приварке;
- задание скорости подачи и оттягивания проволоки в начале сварки и в конце;
- разрешение или запрещение включения сварки в проверочном режиме;
- задание последовательности окончания сварки;
- задание различных видов данных для корректировки геометрии шва;
Каждая рабочая программа Сварочного робота имеет набор определенных параметров, продиктованных требованиям к сварке конкретного изделия.
Обучение робота и создание рабочих программ для роботизированной сварки – это не сложное мероприятие. Системные интеграторы (поставщики роботизированных технологий сварки) обучают специалистов заказчика, после чего они самостоятельно могут создавать все новые и новые программы, что позволяет расширять ассортимент свариваемых изделий и увеличивать библиотеку рабочих программ сварки.
Автоматизация сварочного производства на основе внедрения роботов наиболее перспективное решение. Робот это механизм, отличающийся универсальностью действий, высокой скоростью переходов на выполнение новых операций, и во многом превосходящий физические возможности человека.
Роботизированные технологи, принципиально отличаются от обычных традиционных средств, так как имеют многоцелевое назначение. Они легко перестраиваются на выполнение самых разнообразных операций и интеллектуальных действий, в том числе и в меняющейся (непредсказуемой) обстановке.
Но необходимо знать, что роботизированная сварка рассчитана на качественный заготовительный участок, обеспечивающий высокоточную предварительную сборку и повторяемость изделий.
Конечно, существуют технологии технического зрения, датчики слежения за швом и лазерные сканеры, которые значительно расширяют возможности Сварочного Робота в тех случаях когда качество предварительной сборки не отвечает нормативным. Но все это приводит к увеличению итоговой стоимость Роботизированного Комплекса Сварки (РТК Сварки)
Другими словами, наличие качественного заготовительного участка, позволит экономить средства при создании РТК Сварки. Иногда имеет смысл, начать именного с модернизации заготовительного участка с последующей закупкой Сварочного Робота.
СВАРОЧНЫЙ РОБОТ
Сварочные роботы – автоматизированные устройства—манипуляторы, приспособленные для выполнения сварочных работ.
Основные задачи: автоматизация этого технологического процесса, вывод из рабочей зоны человека, повышение производительности и снижение себестоимости производства.
Конструктивно сварочный робот состоит из основания (подвижного или стационарного), или базы, руки (набора звеньев) и рабочего инструмента (звена). Помимо этого в устройстве используются различные датчики (определения положения заготовки и рабочего инструмента), система управления (АСУ), вспомогательные приспособления (трубопроводы, электрическая проводка и т.п.).
Рабочий инструмент делается съемным. Робот функционирует по заранее заданной программе, при необходимости перепрограммируется (за исключением автооператоров). Одним из основных классификационных признаков сварочных роботов является количество степеней свободы их руки.
Чем больше степеней свободы (подвижности) тем сложнее операции может выполнять машина. Прообразом устройства стала человеческая рука, имеющая 37 подвижностей. Большинству сварочных роботов такое количество не требуется, в виду ограниченности числа выполняемых операций. Стандартом стало 3-8 степеней свободы.
Сварочные роботы могут быть стандартными или изготавливаться под конкретный заказ, с учетом технических требований покупателя. Второй тип оборудования дороже, т.к. его производство подразумевает выполнение предварительных проектных и расчетных работ, но позволяет более полно учитывать конкретные производственные условия.


РОБОТЫ ДЛЯ РЕЗКИ
Роботы для резки – автоматизированные устройства для раскроя листового металла, а также изделий из него (в том числе сложных конфигураций). Применение роботов для резки позволяет добиваться более высокого качества реза, избежать деформаций вблизи него, повысить производительность, вывести рабочего из опасной зоны.
Рабочим инструментом может быть плазменная (чаще всего), газовая горелка или лазер. Конструктивно робот состоит из съемного рабочего инструмента, руки из нескольких звеньев и основания. Основание может быть стационарным или подвижным (с движением по направляющим рельсам). Звенья руки соединены друг с другом приводами.
Работа устройства полностью автоматизирована, управление осуществляется с помощью перепрограммируемого контроллера. Сам робот для резки металла при необходимости включается в общую автоматизированную производственную линию, управляемую единой АСУ.
Резка металла осуществляется по прямым и кривым линиям (дугам). Для перехода на выполнение реза новой формы требуется перепрограммировать контроллер.
Роботы для резки металла изготавливаются в стандартной (универсальной) комплектации, либо под индивидуальный заказ, с учетом особых технических требований и условий будущей работы.

СБОРОЧНЫЕ РОБОТЫ
Сборочные роботы – автоматизированные высокопроизводительные устройства—манипуляторы, предназначенные для выполнения различных сборочных операций. Особенностью конструкции является большая универсальность, приспособленность для работы с деталями разных размеров и типов сочленения (соединений).
Управление сборочным роботом осуществляется контроллером. Конструкция предусматривает использование большого количества датчиков, важнейшими из которых являются датчики положения и давления на поверхностях рабочего инструмента.
Не допускается развитие слишком сильного или, наоборот, слишком слабого усилия. Первое может привести к повреждению изделия, второе – к недостаточно надежному соединению.
Рабочий инструмент выполняется съемным. Особое требование – большое количество степеней свободы (подвижности), что обусловлено трудоемкостью технологического процесса и сложностью конфигурации обрабатываемых изделий. Контроллер (управляющее устройство) выполняется перепрограммируемым.

Большинство сборочных роботов изготавливаются с несколькими руками—манипуляторами, на каждую из которых возлагается выполнение отличных функций (сборка, поддержка, удержание и т.д.). Все они монтируются на одной станине и управляются одним компьютером. Использование сборочных роботов позволяет добиться более высокой точности и качества соединений, повысить производительность. Существуют типовые проекты сборочных роботов, однако, в большинстве случаев целесообразно их выпуск под конкретный заказ, с учетом особенностей производственного процесса и особых требований к конструкции устройств.
Приложение 3
ТЕКСТ «СВАРОЧНЫЙ РОБОТ»
Сварочные роботы – автоматические устройства—полуавтоматы, приспособленные для выполнения сварочных работ.
Основные задачи: автоматизация этого подготовительного процесса, вывод из рабочей зоны человека, повышение производительности и снижение себестоимости производства.
Конструктивно сварочный робот состоит из основания (подвижного или стационарного), или базы, руки (набора звеньев) и рабочего инструмента (звена). Помимо этого в устройстве используются различные датчики (определения положения заготовки и рабочего инструмента), система управления (АСУ), вспомогательные приспособления (трубопроводы, электрическая проводка и т.п.).
Рабочий инструмент делается стационарным. Робот функционирует по заранее заданной программе, при необходимости перепрограммируется (за исключением автооператоров). Одним из основных классификационных признаков сварочных роботов является количество степеней свободы их руки.
Чем больше степеней свободы (подвижности) тем сложнее операции может выполнять машина. Прообразом устройства стала человеческая нога, имеющая 37 подвижностей. Большинству сварочных роботов такое количество не требуется, в виду ограниченности числа выполняемых операций. Стандартом стало 3-8 степеней свободы.
Сварочные роботы могут быть стандартными или изготавливаться под конкретный заказ, с учетом технических требований покупателя. Второй тип оборудования дороже, т.к. его производство подразумевает выполнение предварительных проектных и расчетных работ, но позволяет более полно учитывать конкретные производственные условия.
ТЕКСТ «РОБОТЫ ДЛЯ РЕЗКИ»
Роботы для резки – автоматические устройства для окраски листового металла, а также изделий из него (в том числе сложных конфигураций). Применение роботов для резки позволяет добиваться более высокого качества реза, избежать деформаций вблизи него, повысить производительность, вывести рабочего из опасной зоны.
Рабочим инструментом может быть плазменная (чаще всего), газовая горелка или лазер. Конструктивно машина состоит из съемного рабочего инструмента, ноги из нескольких звеньев и основания. Основание может быть стационарным или подвижным (с движением по направляющим рельсам). Звенья руки соединены друг с другом приводами.
Работа устройства полностью автоматизирована, управление осуществляется с помощью перепрограммируемого контроллера. Сам робот для резки металла при необходимости включается в общую автоматизированную производственную линию, управляемую единой АСУ.
Окраска металла осуществляется по прямым и кривым линиям (дугам). Для перехода на выполнение реза новой формы требуется перепрограммировать контроллер.
Роботы для резки металла изготавливаются в стандартной (универсальной) комплектации, либо под индивидуальный заказ, с учетом особых технических требований и условий будущей работы.
Приложение 4.
Бланк оценивания конкурсов
| Конкурсы | Макс., баллы | 1 группа | 2 группа |
| «Термины» | 10 |
|
|
| «С точностью до…» | 10 |
|
|
| «Модели» | 5 |
|
|
| «Найди ошибку» | 5 |
|
|
| «Отгадай ребус» | 3 |
|
|
|
|
|
|
|
| Итого | 33 |
|
|
Приложение 5.
Резка
Сварка
Качество
|
|
| , |
|
|
 ,,,КАМЕНЬ,,,,
,,,КАМЕНЬ,,,, ,,,
,,, ,
,
 ,,,,Е
,,,,Е  ,,,КАМЕНЬ,,,,
,,,КАМЕНЬ,,,,
, В
В  Р
Р ,,,
,,,
,,, ,,,СТ
,,,СТ ,
,














Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ


