
Узбекистан, Фергана


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 03.04.2023 13:55

Jabborov Islombek To'lqinjon o'g'li
магистрант
28 лет
Местоположение
Особенности теплотехники. Виды органического топлива
Категория:
Физика
26.03.2023 03:08

Просмотр содержимого документа
«Особенности теплотехники. Виды органического топлива»

Выпускная квалификационная работа бакалавра
Управление в условиях неопределённости методом прямой адаптации
Направление: 15.03.03 – Прикладная механика
Выполнил: студент гр. 3631503/70301 А. А. Хорев
Руководитель: профессор, ст. научн. сотр. Л. М. Яковис
1/16

Цели и задачи
Цель: Исследование работоспособности робастно-адаптивного метода управления в условиях случайного характера возмущающих воздействий
Задачи работы:
- Реализовать имитационную модель технологического процесса в программной среде MATLAB-Simulink.
- С помощью имитационной модели оценить потенциальную эффективность метода робастно-адаптивного управления для варианта случайных возмущений.
- Разработать алгоритм поиска настроек типовых регуляторов, не зависящий от интенсивности случайных возмущений.
2/16
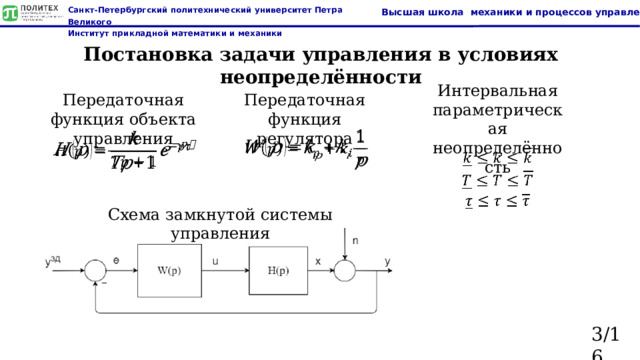
Постановка задачи управления в условиях неопределённости
Интервальная
параметрическая неопределённость
Передаточная функция объекта управления
Передаточная функция регулятора
Схема замкнутой системы управления
3/16

Известные подходы к управлению в условиях неопределённости
Компенсационный метод настройки ПИ-регулятора
а – параметр метода, учитывающий критерий качества управления
,
, – параметры расчётной модели ОУ
Традиционное управление
,
Робастное управление
,
Адаптивное управление
,
4/16

Метод робастно-адаптивного управления
- вектор параметров объекта управления
- вектор параметров ПИ-регулятора
– зависимость параметров регулятора от параметров объекта, соответствующая компенсационному методу
– точка, соответствующая робастным настройкам регулятора
– точка, соответствующая традиционным настройкам регулятора
- нахождение настроек регулятора по робастно-адаптивному методу
5/16

Выбор параметров объекта управления
Диапазон рассматриваемых параметров объекта
6/16

Дискретизация области неопределённости
Общее количество рассматриваемых точек
7/16

Имитационная модель для исследования робастно-адаптивного управления (1)
Общая схема имитационной модели
8/16
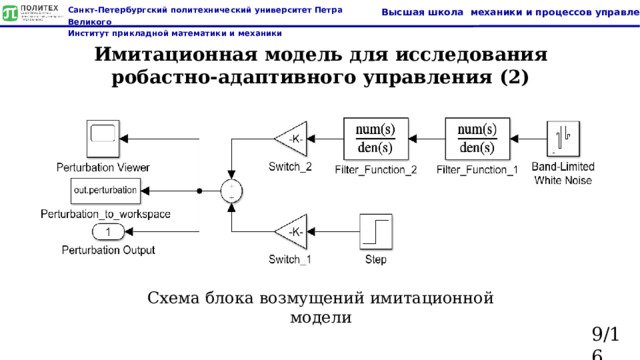
Имитационная модель для исследования робастно-адаптивного управления (2)
Схема блока возмущений имитационной модели
9/16

Оценка потенциальной эффективности робастно-адаптивного управления
Номер точки
Потеря эффективности, %
1
2
Номер точки
1.89
3
14.33
15
Потеря эффективности, %
4.91
4
16
24.69
5
0.53
17
22.53
18.50
18
1.76
6
1.34
19
4.62
7
9.30
8
20
0.09
9
0.13
21
4.20
0.34
10
22
31.72
11
0.10
23
20.84
18.15
24
0.03
12
13
8.22
25
0.55
14
7.87
52.27
26
36.39
27
9.01
18.94
Сравнение среднеквадратического отклонения (СКО) выходной переменной
10/16
Средний уровень потери эффективности – 11.6%

Способ поиска, основанный на анализе интервалов времени между нулями выходной переменной
СКО выходной переменной
СКО интервалов времени
11/16

Способ поиска минимума СКО выходной переменной с помощью аппроксимации
Номер точки
1
Потери первой аппроксимации, %
2
78.85
Потери второй аппроксимации, %
3
70.90
16.13
Потери третьей аппроксимации, %
4
16.53
16.13
169.68
16.53
5
20.06
93.14
66.68
260.95
20.06
6
65.11
93.14
433.41
7
65.11
194.98
8
87.72
74.90
9
117.50
336.43
96.64
104.68
400.32
10
21.24
11
2.08
104.68
12
13.99
37.80
0.37
0.37
0.00
24.45
13
7.56
14
0.00
0.00
46.29
3.68
15
0.00
67.86
0.00
3.68
16
0.00
5.04
32.34
17
48.06
18
10.45
0.00
4.86
19
5.68
101.75
4.86
0.00
20
0.00
4.47
0.89
21
0.00
0.00
2.68
31.00
…
2.68
1.07
…
…
1.07
…
Средние потери первой аппроксимации, %
Средние потери второй аппроксимации, %
92.30
20.99
Средние потери третьей аппроксимации, %
20.99
Пример аппроксимации зависимости СКО интервалов времени между нулями выходной переменной от параметра для точки 16
12/16
![Статистический способ поиска минимума СКО выходной переменной Зависимость СКО выходной переменной от параметра для точки 19 Зависимость СКО интервалов времени между нулями выходной переменной от параметра для точки 19 Значение параметра n 2 Средние потери эффективности по сравнению с минимальным значением, % Средние потери эффективности по сравнению с робастным значением, % 13.70 3 -41.98 41.84 -12.28 Безопасный диапазон значений [0; 0.28] 13/16](https://static.multiurok.ru/multiurok/html/2023/03/26/s_641f8c952720e/img12.jpg)
Статистический способ поиска минимума СКО выходной переменной
Зависимость СКО выходной переменной от параметра для точки 19
Зависимость СКО интервалов времени между нулями выходной переменной от параметра для точки 19
Значение параметра n
2
Средние потери эффективности по сравнению с минимальным значением, %
Средние потери эффективности по сравнению с робастным значением, %
13.70
3
-41.98
41.84
-12.28
Безопасный диапазон значений [0; 0.28]
13/16

Оптимизация статистического способа поиска минимума СКО выходной переменной
Значение параметра n
Значение параметра n
Количество значений за границей устойчивости
1.4
1.4
5
5
1.5
1.5
6
1.6
1.6
6
6
6
1.7
1.7
1.8
8
1.8
8
10
10
1.9
1.9
10
2
10
2
12
12
2.1
2.1
2.2
13
13
2.2
16
16
2.3
2.3
17
2.4
2.4
17
18
18
2.5
2.5
19
2.6
2.6
19
19
19
2.7
2.7
20
2.8
20
2.8
20
20
2.9
2.9
20
3
3
20
20
20
14/16

Заключение
- Рассмотрен метод робастно-адаптивного управления, позволяющий управлять технологическими процессами в условиях параметрической неопределённости.
- В программной среде MATLAB-Simulink реализована имитационная модель технологического процесса.
- Проведена оценка потенциальной эффективности метода робастно-адаптивного управления для варианта случайного характера возмущающих воздействий.
- Предложен новый способ анализа моделируемой системы, не зависящий от интенсивности случайных возмущений.
- На основе нового способа анализа сформулирован статистический метод нахождения параметра алгоритма робастно-адаптивного управления.
- Для статистического метода даны рекомендации по выбору величины параметра n.
15/16

Спасибо за внимание
16/16








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

