
Россия, Каменск-Шахтинский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 17.04.2026 10:21

Барышев Евгений Валентинович
педагог дополнительного образования
61 год
Местоположение
Специализация
Робот на платформе Rocker-Bogie
Категория:
Прочее
16.10.2023 20:38

Просмотр содержимого документа
«Робот на платформе Rocker-Bogie»
Ростовская область
Муниципальное бюджетное учреждение
дополнительного образования «Станция юных техников»
Лестничный робот
объединение «Робототехника»
исполнитель: Цыбенко Александр.
руководитель:
педагог дополнительного образования
Барышев Евгений Валентинович.
г. Каменск-Шахтинский
2023 год
Оглавление
|
| Введение | 3 |
| 1. | Исследование и анализ | 4 |
|
| Вывод | 6 |
| 2. | Принцип работы модели | 7 |
| 3. | Этапы изготовления модели | 8 |
|
| Материалы и инструменты | 8 |
|
| Механическая начинка модели | 8 |
|
| Электронная начинка модели | 10 |
| 4. | Заключение | 14 |
| 5. | Библиографический список | 15 |
| 6. | Приложения | 16 |
Введение
В последние годы происходит роботизация буквально всех сфер человеческой деятельности. Диапазон применения мобильной робототехники чрезвычайно широк.
Обычно робот, созданный для конкретных задач в одной области, не способен работать в другой. Актуальным направлением является в робототехнике, это движение роботов по бездорожью, и способных преодолевать различные лестничные проемы.
Хорошо известно, что шагающие роботы характеризуются относительно сложной конструкцией, чрезвычайно низкой скоростью перемещения и высокими энергозатратами [5, 125], однако они способны преодолевать препятствия, двигаться по грунту с низким коэффициентом трения.
В противоположность шагающим роботам, колесные мобильные роботы имеют простую конструкцию и достаточно высокую скорость при низких энергозатратах, однако они могут двигаться только по поверхности, не имеющей существенных препятствий, легко застревают в песчаной почве.
Известно несколько попыток создания комбинированных роботов, которые сочетают некоторые достоинства шагающих и колесных машин в одной конструкции [6]. Как правило, такие роботы представляют собой шагающие машины, у которых на концах ног установлены колеса. Такие конструкции могут работать как шагающие машины или как колесные машины в зависимости от типа поверхности, по которой движется робот.
Целью данного проекта является создание робота, для движения по лестнице, с оптимальной маневренностью в ограниченном пространстве.
Задачи проекта:
- рассмотреть виды и разновидности вездеходов, технические характеристики;
- разработать поворотный механизм для робота;
- разработать 3D детали робота, схемы электроники;
- написать программу в среде программирования Arduino ID для управления по радиоканалу.
1. Исследование и анализ
За последние годы в России было создано немало эффективных вездеходов, как для военных, так и для гражданских целей. И стоит отметить, что отечественный автопром справляется с созданием вездеходов успешно.
Компания Migo Robotics начала выпуск ультра современного робота-пылесоса MIGO Ascender способного не только подниматься по лестницам, но и убирать ступени и лестничные марши [8]. Робот использует две подвижные ножки, чтобы забраться по ступенькам (рис. 1).

Рисунок 1. Шагающий робот-пылесос Ascender.
Поверхность Марса пребывает пока в неухоженном состоянии, в частности - там не проложены дороги. Местность на планете неровная, с множеством бугорков и впадин, в которых автомобиль с традиционной земной подвеской легко может застрять.
Поэтому в 1988 году для американского марсохода Sojourner, была разработана специальная подвеска Rocker-Bogie, что дословно означает «коромысло-тележка» [7]. Она делает транспортное средство более проходимым и устойчивым, максимально равномерно распределяя нагрузку даже на неровных поверхностях (рис. 2).
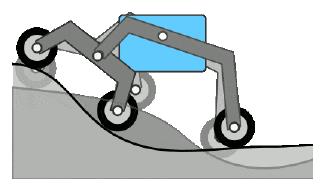
Рисунок 2. Подвеска Rocker-Bogie.
При такой конструкции колеса по обе стороны корпуса независимы, не соединены осями и оснащены каждое отдельным двигателем. Благодаря Rocker-Bogie дорожный просвет планетохода достигает полутора диаметров колеса. Рессоры, в отличие от земных машин, не предусмотрены, поскольку в некоторых случаях рессорная подвеска может приводить к уменьшению сцепления с грунтом. Вездеход способен преодолевать препятствия, почти в два раза превышающие диаметр колес, при этом ни одно из шести колес не отрывается от поверхности.
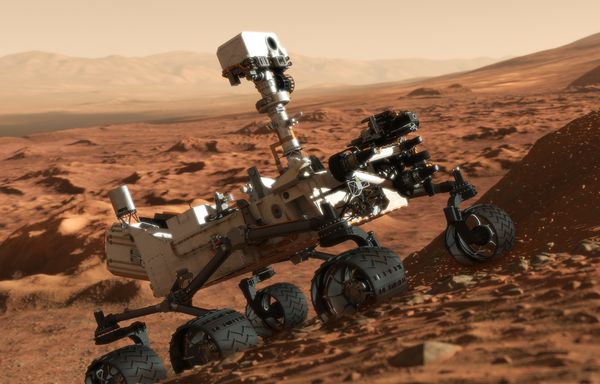
Рисунок 3. Марсоход Curiosity.
Эффективность системы подвески измеряется ее способностью уменьшать усилия, действующие на кузов, разумно распределять их, поддерживать устойчивость кузова и его колебания в допустимых пределах, а также обеспечивать высокий угол наклона робота без опрокидывания. Для системы Rocky Bogie, если центр тяжести выбран точно и разумно, это обеспечивает высокую эффективность; в качестве примера хорошо спроектированной системы марсохода Curiosity (рис. 3) который может наклоняться до 50 градусов без переворачивания.
Вывод:
Проанализировав вездеходные машины на сайтах интернета, их принципы работы, ходовые качества, алгоритм движения, преимущества видов передвижения, определились со способами и методами выполнения проекта. Для работы над проектом будем использовать следующие методы: метод исследования, метод анализа, экспериментально – теоретический метод, метод эксперимента и метод сравнения.
В целях проверки гипотезы и для наглядной демонстрации принципа движения робота по лестнице выбрали платформу Rocker-Bogie (коромысло-тележка), приняли решение доработать платформу, чтобы она могла не только двигаться по лестнице, но и поворачивать на лестничном марше.
Платформа Rocky Bogie - одна из самых удачных конструкций небольших шестиколесных роботов. Единственным минусом является то, что она двигается только по прямой траектории. Установим на каждое колено платформы по сервоприводу, теперь поворотный механизм должен повернуть каждое колесо на 90 градусов относительно направления движения, и преодолевать крупные препятствия путём поочерёдного поднятия трёх пар колёс.
Для управления платформой, применим радио модуль NRF24L, С этой задачей может справиться плата на контроллере Atmega 328 [2, 159 - 165]. Управляться робот будет с помощью пульта. Поворачивать колеса будут сервоприводы марки SG90S. В каждое колесо установим двигатели с редуктором марки 25GA370. В качестве драйвера двигателей будем использовать микросхему L239D.
2. Принцип работы модели
В движение робот приводят 6 двигателей, которые расположены в кронштейнах колес. Все двигатели подключены параллельно, поэтому робот обладает высокой проходимостью.
В пульте установлены джойстики, для плавного движения вперед и назад и рулевое колесо для поворота колес робота [1, 72 -75].
При плавном повороте руля влево, до 50 градусов, передние колеса поворачивают влево, а задние вправо, робот плавно поворачивает влево. Средние колеса не поворачивают, остаются в исходной позиции. При повороте джойстика руля от 50 градусов и больше, все колеса поворачивают на 90 градусов, робот движется боком.
При движении робота по лестнице колеса по очереди спускаются или поднимаются на каждую ступеньку (рис. 4). Проблемно подниматься по лестнице, у которой ступеньки имеют выступ как на рисунке 3.

Рисунок 4. Робот спускается по лестнице.
3. Этапы изготовления модели
Материалы и инструменты
Фотография модели лестничного робота находится в приложении, рисунок 14.
Для изготовления модели применялся следующий инструмент и материал:
Пластмасса толщиной 3мм, размером 240 х 140мм.
3D принтер.
ЧПУ фрезерный станок.
Пластиковая 3D нить диаметром 1,75 мм – 350 грамм.
Компьютер.
Сервоприводы SC90S - 6шт.
Двигатели с редуктором марки 25GA370 – 6шт.
Гайки М3 - 22 шт.
Болты диаметром 3мм, длина 8мм - 22шт.
Шпилька с резьбой М8 – 350мм.
Текстолит фольгированный размером 150х60мм;
Набор слесарного и монтажного инструмента.
Набор радиодеталей по принципиальным схемам.
Механическая начинка модели
При разработке модели учитывались легкодоступные и дешевые материалы. Детали модели смоделировали по рисункам в компьютерной программе Autodesk 123ds и распечатали на 3D принтере (рис. 5, 6, 7).
Время создания 3D деталей на компьютере и печати на 3D принтере составило примерно 38 часов. Для печати использовалась пластиковая нить PLA, диаметром 1.75 мм, диаметр сопла – 0,4 мм, высота слоя - 0,3 мм, плотность внутреннего заполнения - 30%, скорость печать – 60 мм/сек.
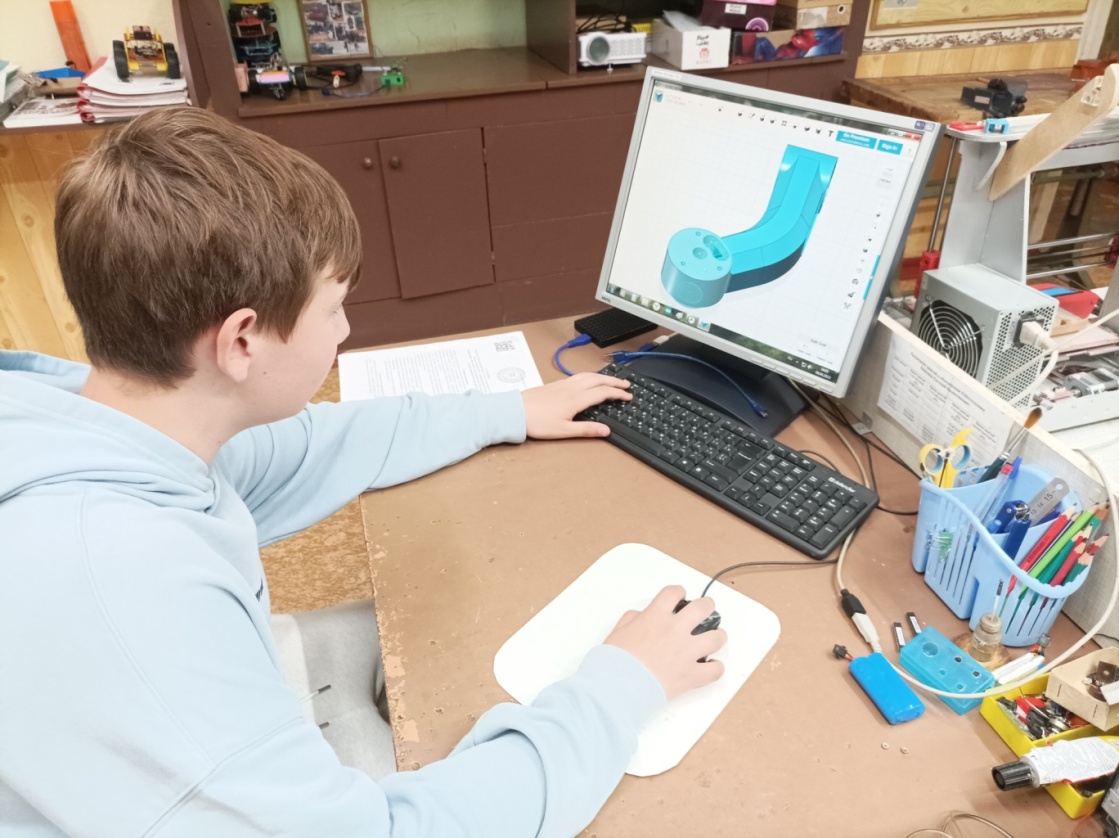
Рисунок 5. Создание шасси робота.
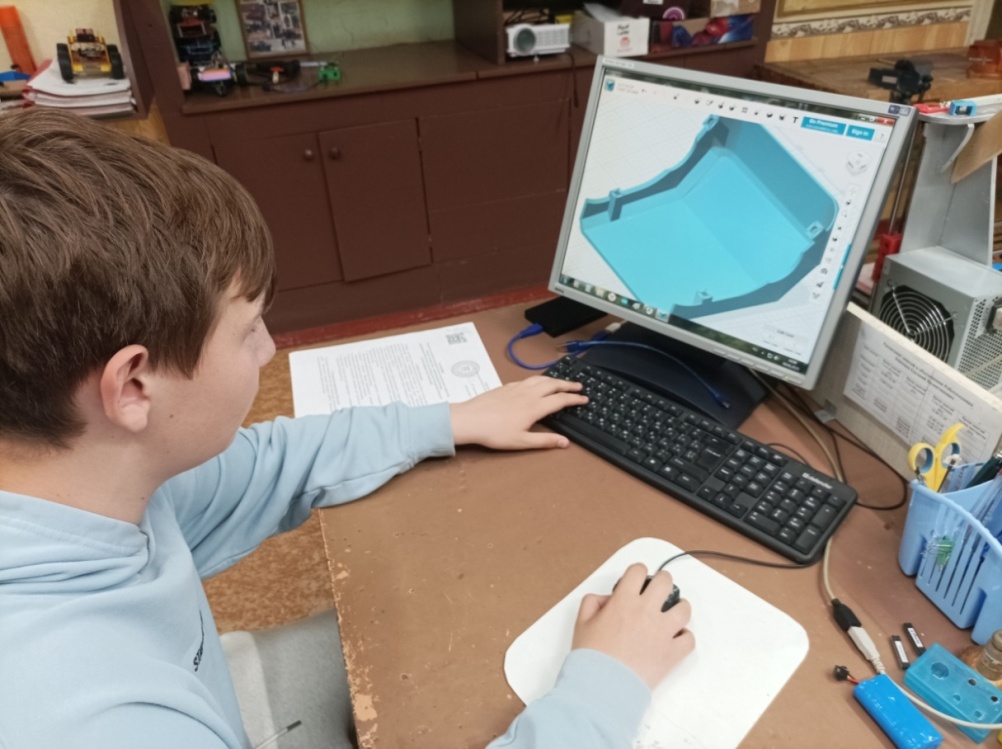
Рисунок 6. Создание корпуса для робота.
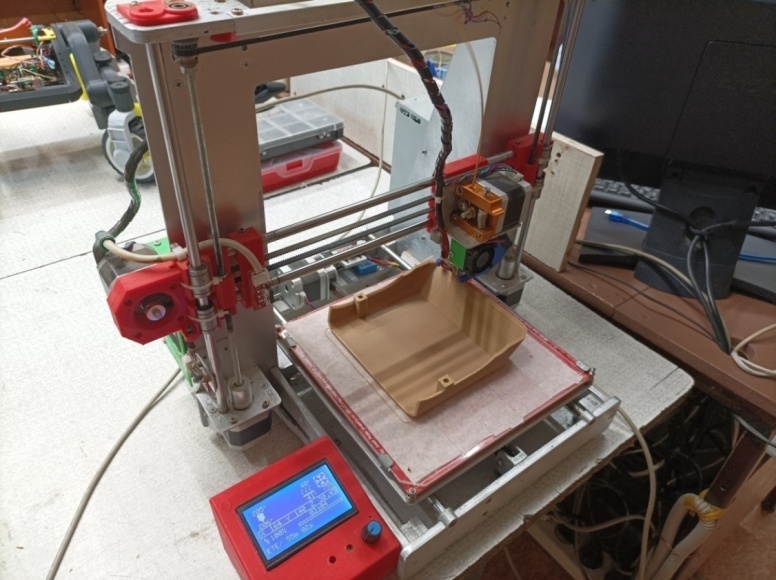
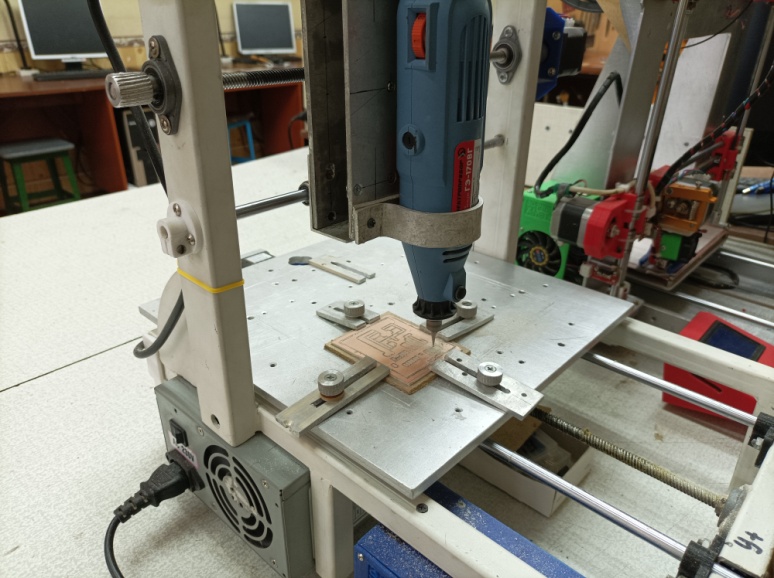
Рисунок 7. Печать корпуса и фрезеровка платы для робота.
Низ рамы изготовлен из пластмассы. Шасси робота построено по такой схеме, если колеса по левому борту опустились в яму, то колеса по правому борту поднимаются благодаря балансировочному механизму [3, 43 - 52].
Вся ходовая часть модели крепятся к раме (рис. 8), на ней же располагается плата с контроллером, установлен отсек для аккумуляторов и два серводрайвера для сервоприводов.
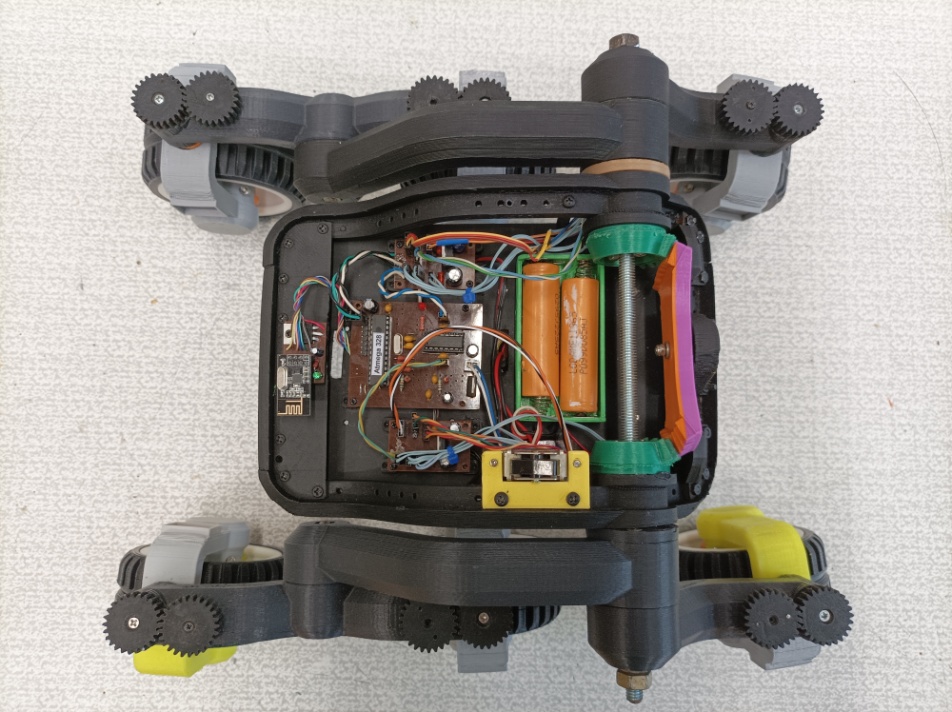
Рисунок 8. Шасси с установленной электроникой на роботе.
Фотографии 3D деталей модели лестничного робота находятся в приложении (рис. 15 - 20).
После распечатки всех деталей и изготовления плат приступили к сборке робота (рис. 9).

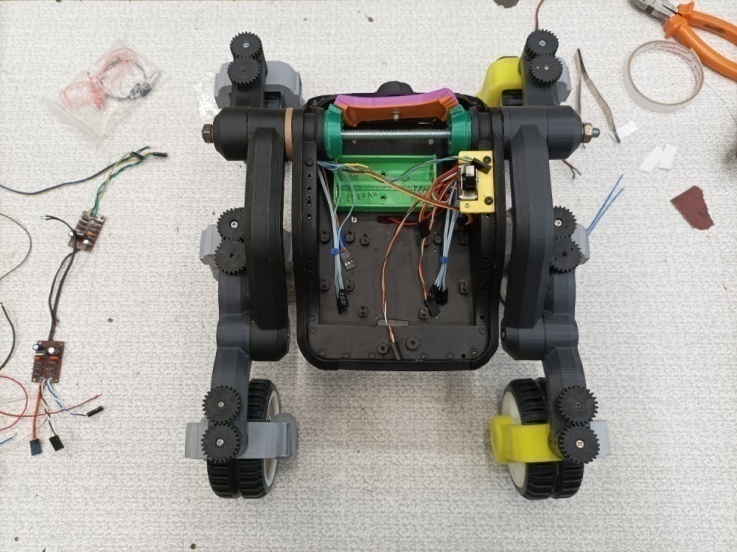
Рисунок 9. Сборка робота.
Электронная начинка модели
Электронику для робота собрали самодельную на контроллере марки Atmega 328 (корпус DIP28), а для передатчика на контроллере марки Atmega 8 (корпус DIP28). Данные контроллеры сочетают в себе функциональность, компактность и сравнительно не высокую цену [4, 35-42].
Принципиальные схемы передатчика и приемника создавались в компьютерной программе sPlan Final Rus. Элементы принципиальных схем взяты из различных источников, составлены и доработаны под наши задачи, готовые принципиальные схемы изображены на рисунках 10 и 11.
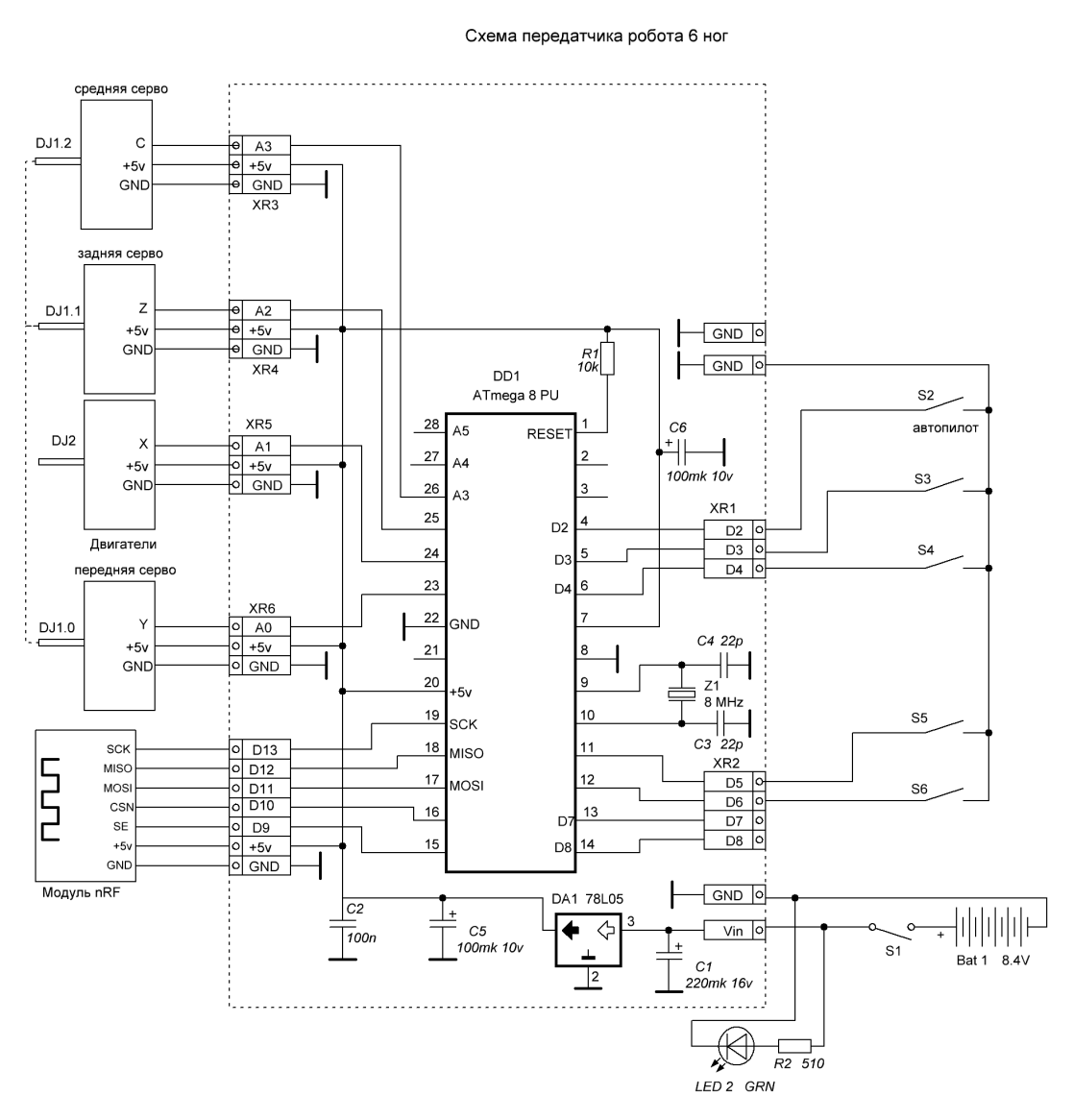
Рисунок 10. Принципиальная схема пульта управления (передатчик).
В пульте предусмотрены дополнительные кнопки для дальнейших экспериментов.
В контроллеры загружены с помощью программатора Arduino ISP программные коды. Размер скетча в двоичном коде для передатчика: 5144 байт (из 7256 байт максимум), для приемника: 6838 байт (из 32256 байт максимум). Тактовая частота контроллера – 8 МГц.
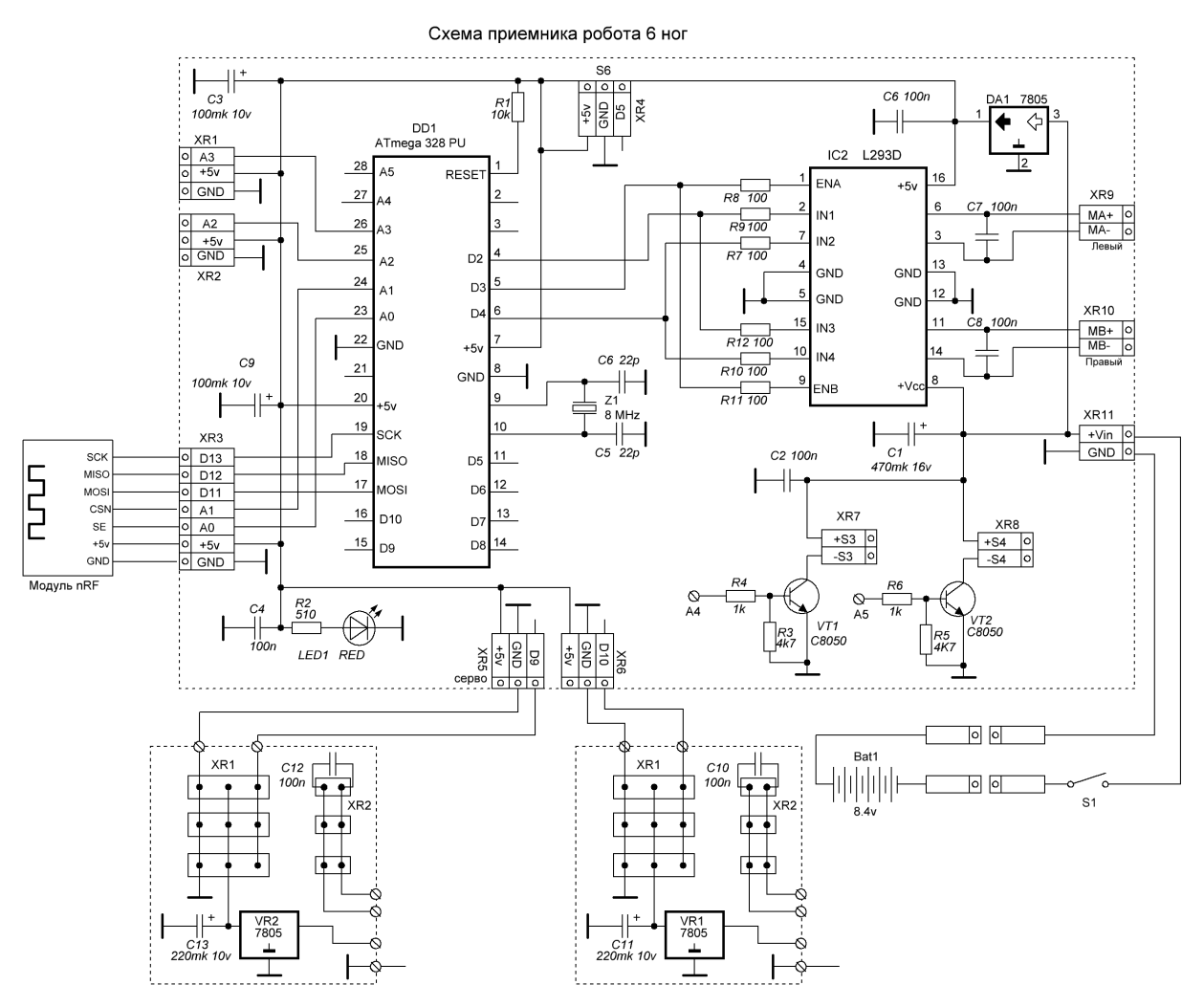
Рисунок 11. Принципиальная схема платы робота (приемник).
Платы созданы в компьютерной программе Sprint Layout версии 6 и изготовлены из фольгированного стеклотекстолита на фрезерном станке (рис. 12, 13).
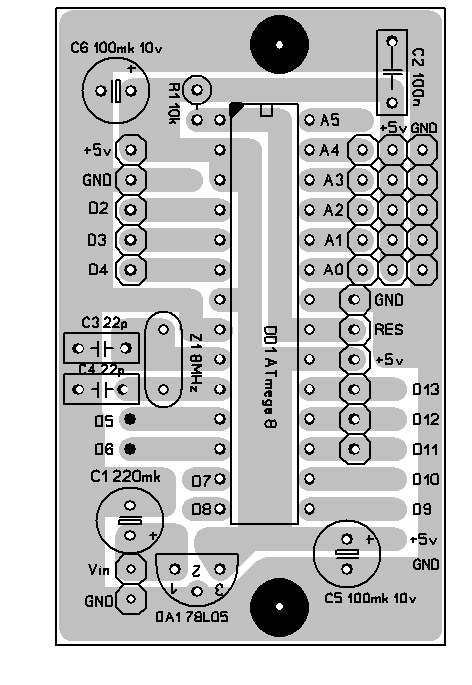
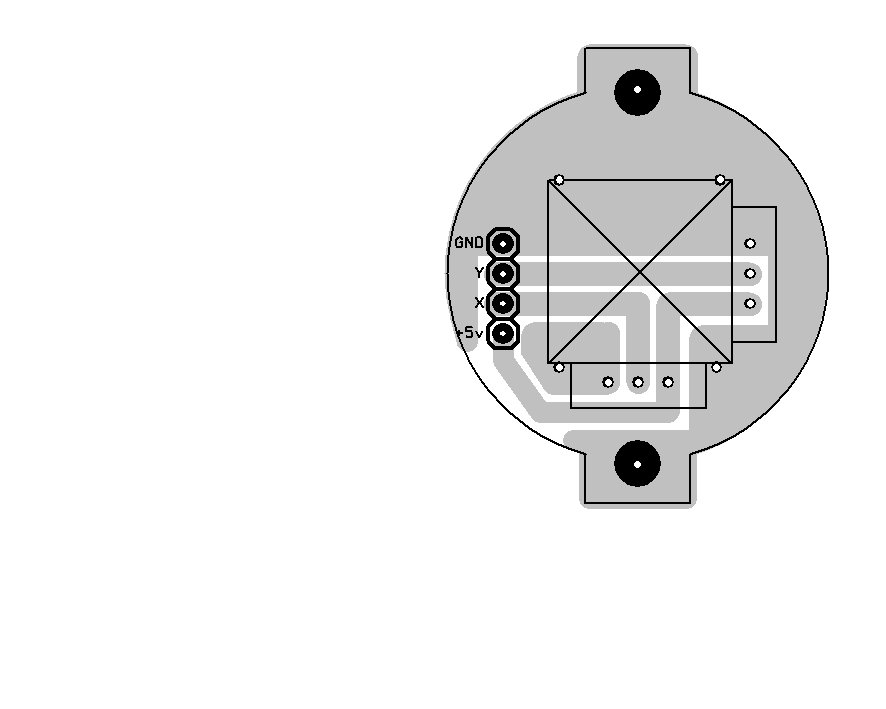
Рисунок 12. Плата контроллера и плата джойстика пульта.
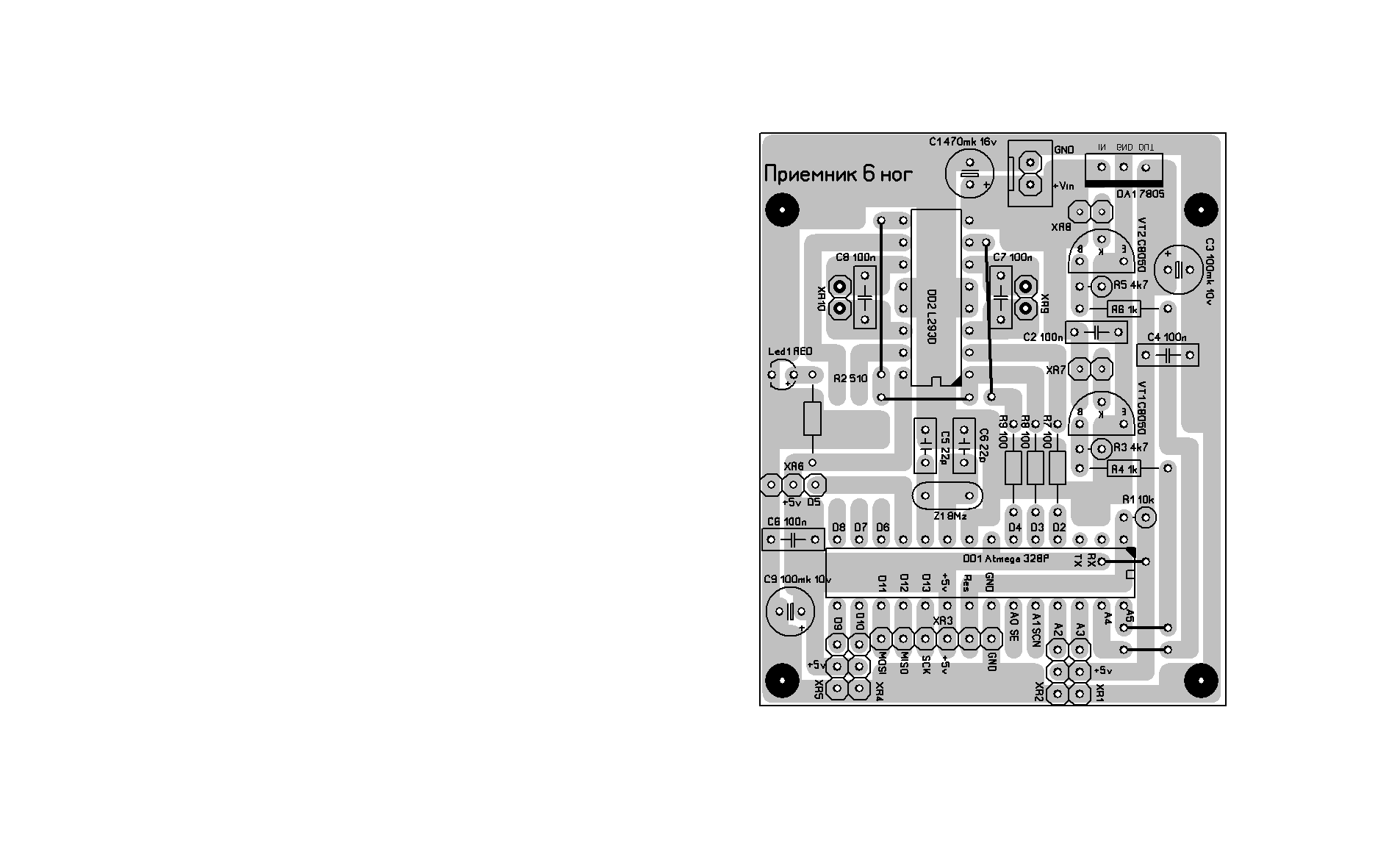
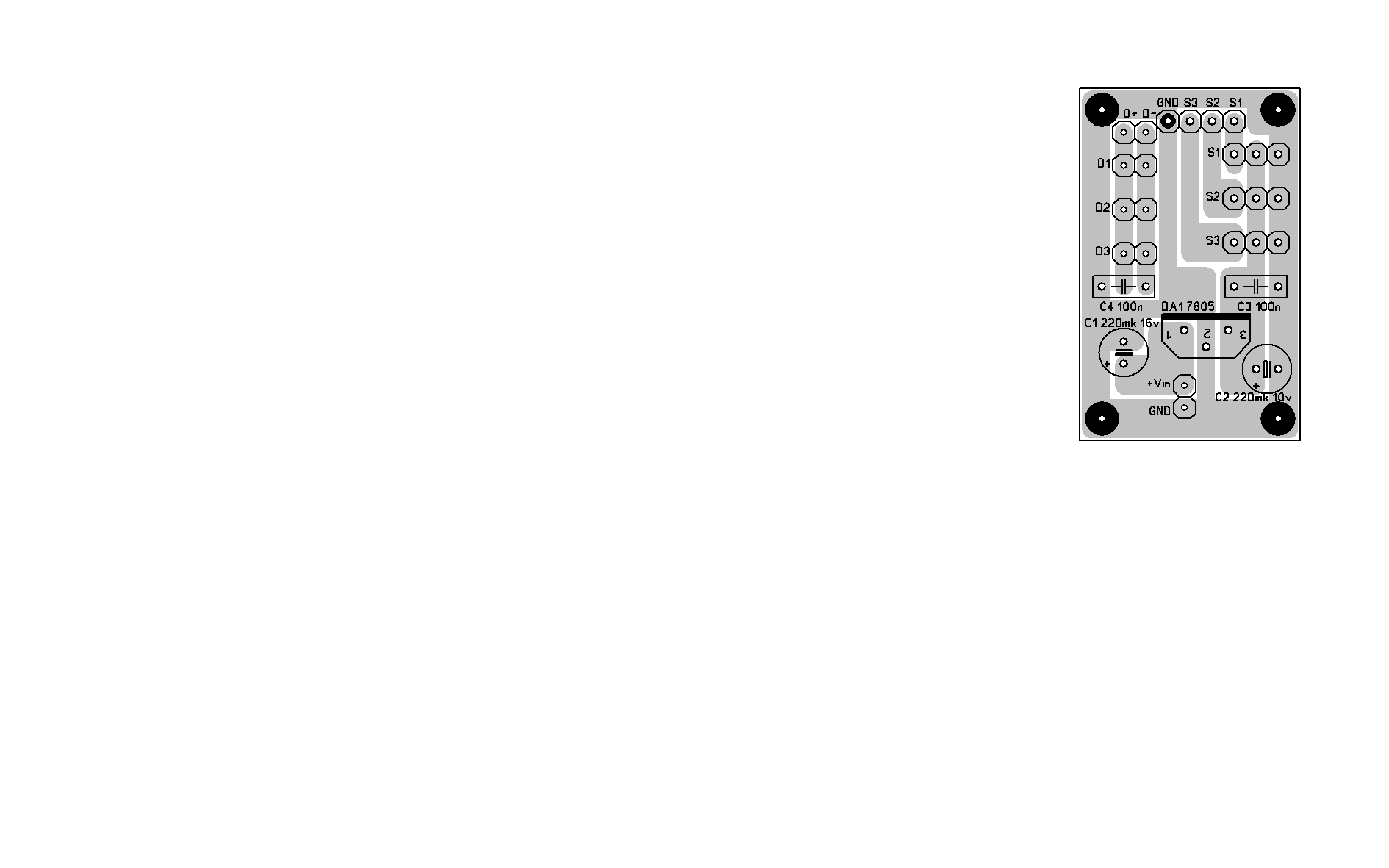
Рисунок 13. Плата приемника и плата серво-драйвера.
Радиодетали для установки в платы робота использовались от списанной радиоаппаратуры. Микросхемы контроллеров и панельки для их установки покупались в интернет-магазине.
Управляется робот с помощью пульта. Плавное движение вперед и назад осуществляется с помощью джойстика, повороты колес с помощью рулевого колеса.
Питание электроники робота осуществляется от аккумулятора, напряжением 8,4 вольт. Потребляемый ток модели при движении по ровной поверхности составил 800мА, при подъеме на ступеньку, 1200 мА.
4. Заключение
Для наглядной демонстрации принципа движения, и выполнение поставленных задач, была создана модель лестничного робота на платформе Rocker-bogie. Были исследованы конструкция и поведение модели, особенности его передвижения. Такая конструкция позволяет роботу довольно успешно двигаться по лестничным проемам, по песку, и многим другим типам поверхности с препятствиями, учитывая его маневренность, робот может легко сменить направление движения в ограниченном пространстве.
Техническая характеристика лестничного робота:
Габаритные размеры – 45см х 35см х 25см (Д х Ш х В).
Мощность электрического двигателя 25GA370 – 6 Вт.
Материал корпуса – металл и пластик.
Время автономной работы - до 2 часов.
Скорость передвижения - не более 4 км/ч.
Привод - шесть ведущих колес диаметром 100 мм.
Аккумулятор - Li-ion (литий-ионный) напряжением 7,4 В, 1800 мА/ч.
Вес робота – 2 кг.
Затраты на изготовление модели робота составили около 5000 рублей.
Разработанный принцип построения колесного робота может быть эффективно использован и при создании кресла для инвалидов, которое сможет перемещаться не только по дороге с покрытием, но и по дороге без покрытия, преодолевать препятствия и двигаться по лестнице.
Такой робот смог бы удовлетворить требования военных, отряды МЧС, леса - охранного хозяйства, используя его как разведчика для оценки обстановки как в помещении так и на улице.
В дальнейшем планирую установить видеокамеру, датчики препятствия и поверхности, и написать программу для беспилотного движения робота.
Заменить некоторые пластиковые детали на металлические.
5. Библиографический список
Джон Ловин. Создаем робота-андроида своими руками. - М.: ДМК пресс, 2007.
Смирнов А. Б., Дубовицких В. А., Мезенцев Д. А. Разработка робота для передвижения по пересеченной местности на базе микроконтроллера ATmega328P - Молодой ученый. - 2016. - №27. - С. 159-165.
Охоцимский Д. Е., Механика и управление движением автоматического шагающего аппарата. - М.: Наука, 1984. 312 с.
Петин В. А. Проекты е использованием контроллера Arduino. - 2-е нзд , перераб и доп. - СПб.: БХВ-Погсрбург, 2015. - 464 с ил.
Фокин В. Г., Шаныгин С. В., Обзор и перспективы развития мобильных шагающих робототехнических систем - Молодой ученый. - 2015. - №18. 207-215 с.
Обзор и перспективы развития мобильных шагающих робототехнических систем. Электронный ресурс. Режим доступа: https://moluch.ru/archive/98/22115.
Марсианский ровер. Электронный ресурс. Режим доступа: https://www.thingiverse.com/thing:1318414.
Шагающий робот-пылесос с возможностью подъема по лестницам. Электронный ресурс. Режим доступа: https://www.ixbt.com/live/chome/shagayuschiy-robot-pylesos-s-vozmozhnostyu-podema-po-lestnicam-migo-ascender-edinstvennyy-robot-v-mire-ubirayuschiy-lestnichnye-prolety.html.
Приложение

Рисунок 14. Фотография модели лестничного робота.
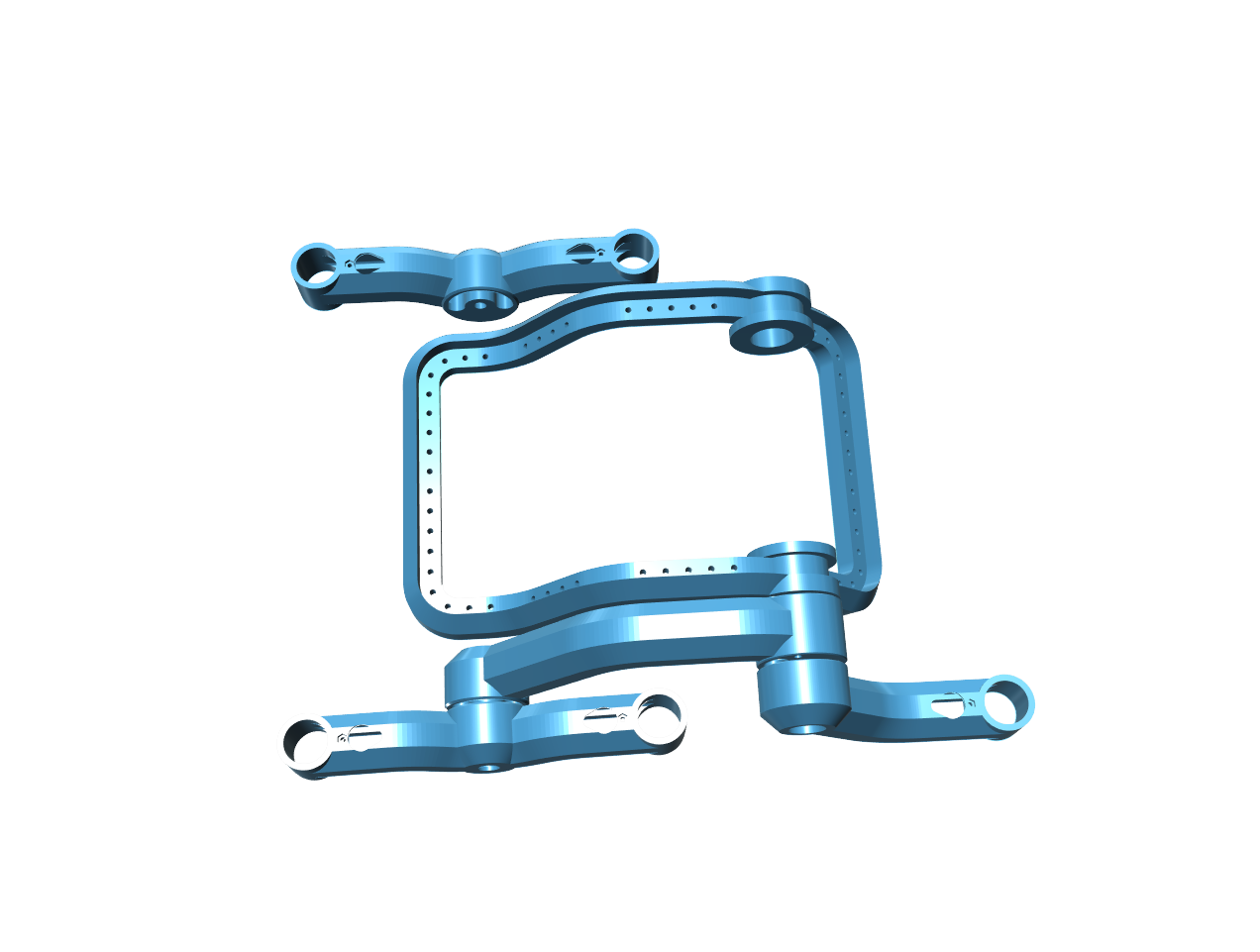
Рисунок 15. 3D вид модели.
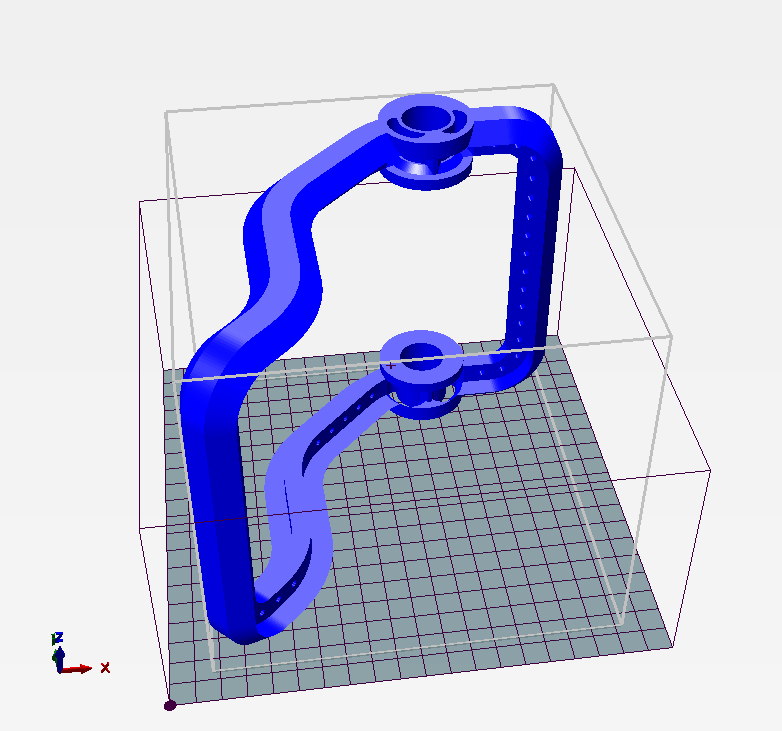
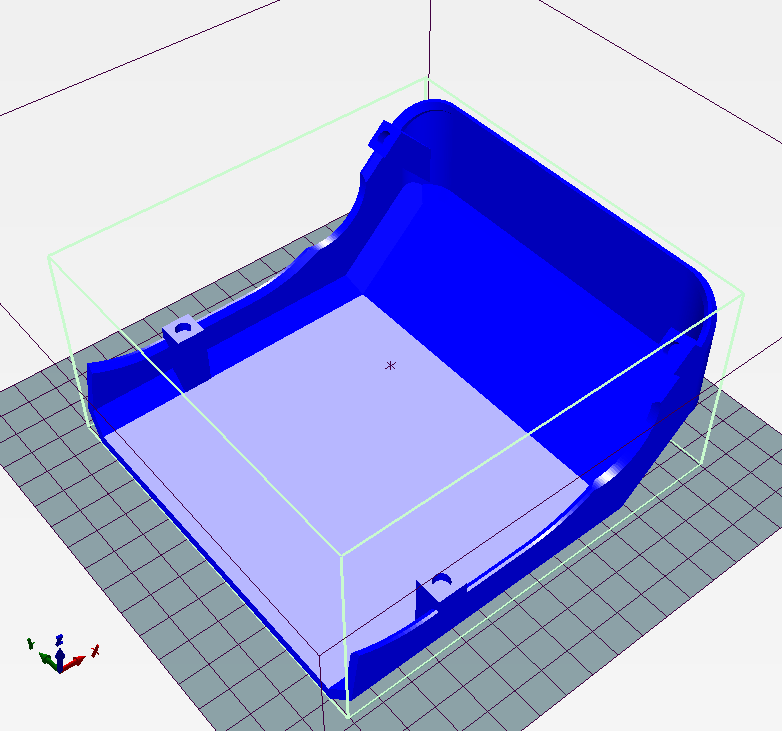
Рисунок 16. 3D детали рамы и корпуса модели.
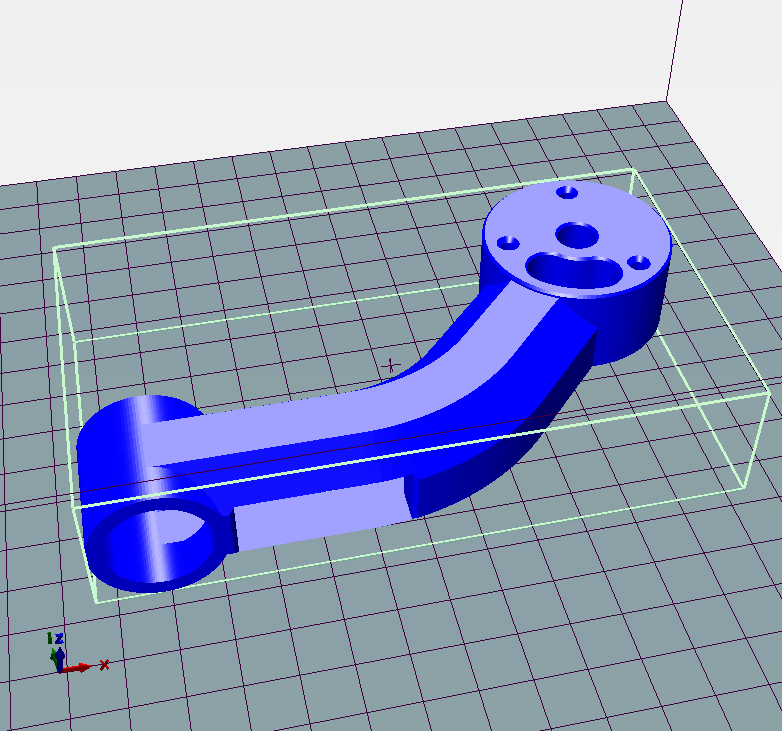
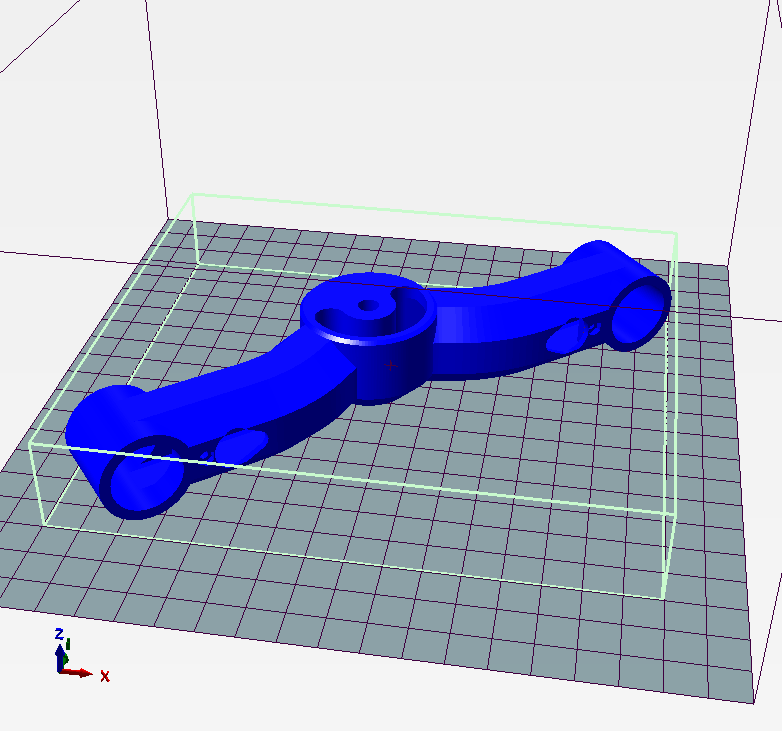
Рисунок 17. 3D детали коромысла шасси.
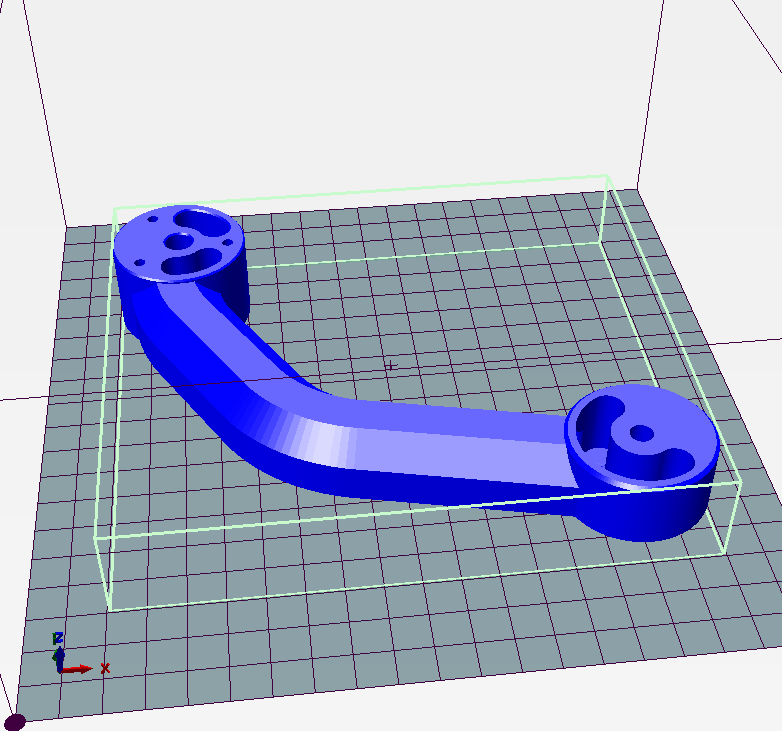
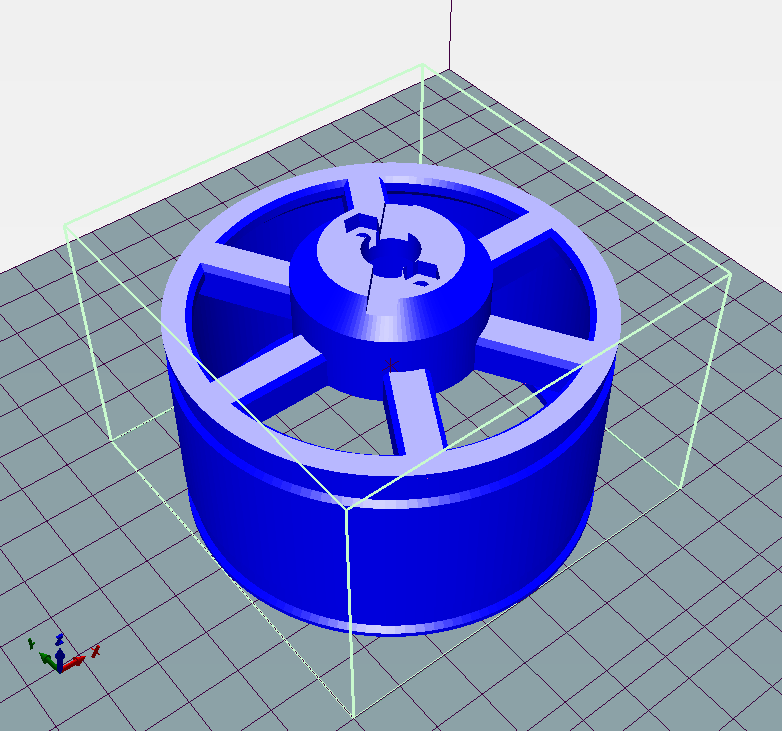
Рисунок 18. 3D детали шасси и диск колеса.
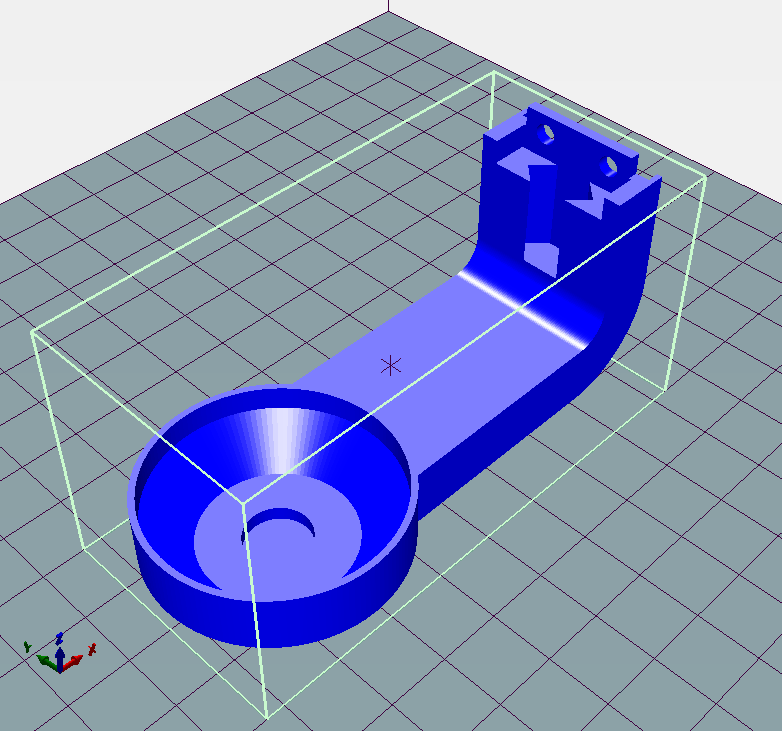
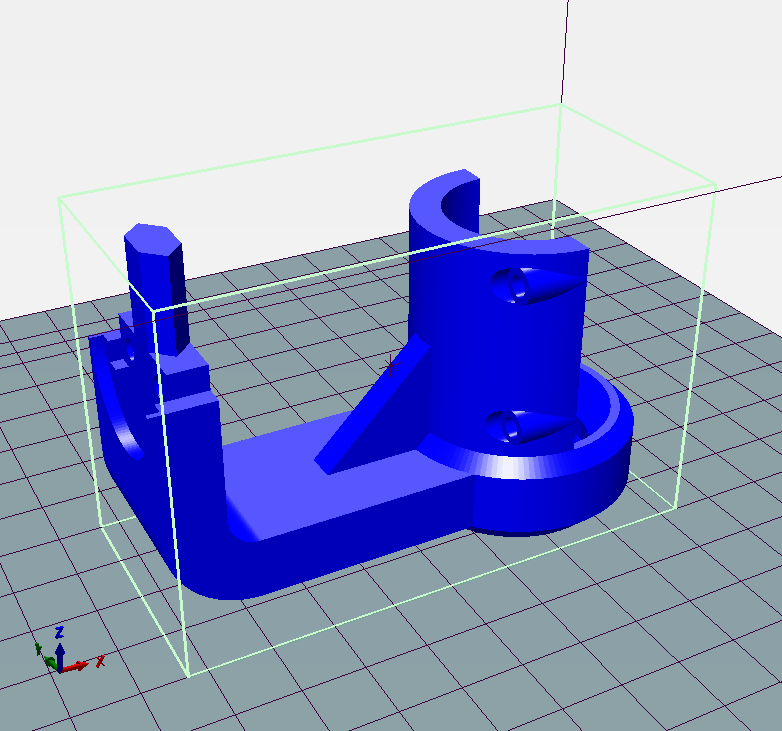
Рисунок 19. 3D детали поворотных устройств.
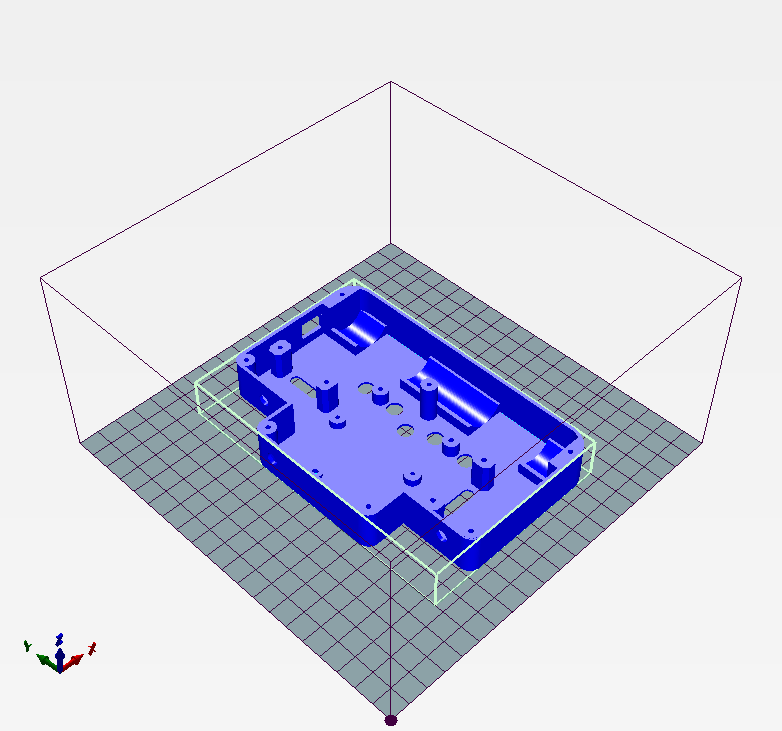
Рисунок 20. 3D деталь пульта управления.








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

