
Россия, Медынь


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 13.05.2024 22:30

Тарапунов Вячеслав Викторович
мастер производственного обучения
62 года
Местоположение
Специализация
СПО Техническая механика. Лабораторная работа. Чтение кинематических схем.
Категория:
Прочее
23.10.2022 22:36

Просмотр содержимого документа
«СПО Техническая механика. Лабораторная работа. Чтение кинематических схем.»
Практическая работа №1 . Основы технической механики и гидравлики
Мастер п/о Тарапунов В.В.
«Чтение кинематических схем».
Цель работы:
Изучить условные обозначения звеньев и кинематических пар согласно ГОСТ 2.770–68, освоить методику составления кинематической схемы механизма по его макету;
Научиться определять число и вид звеньев и кинематических пар; освоить методику построения подробной и укрупненной структурных схем механизма, а также конфигурации структуры механизма
Средства обучения:
Карточки с заданиями, таблицы, линейка, циркуль. Подготовка студентов к занятию.
При подготовке к практической работе необходимо изучить теоретический материал по конспекту, ответить на вопросы:
Для чего используются кинематические схемы? Что отображают кинематические схемы?
С чего начинают чтение кинематических схем? Чем заканчивают чтение кинематических схем? Пояснения к выполнению работы.
Краткие теоретические сведения
Для изучения механизма необходимо знать число и виды кинематических пар, число звеньев, их основные размеры и взаимное расположение. Все это изображается на кинематической схеме механизма условными обозначениями пар и звеньев. Условные обозначения установлены ГОСТ 2.770–68. Основные виды звеньев и кинематических пар приведены в таблицах 1и 2.
При изучении работы различных станков, механизмов, при их наладке или ремонте, при монтаже электрического оборудования нередко требуется уяснить принципиальную связь между элементами монтируемого устройства без уточнения его конструктивных особенностей. Для этой цели предназначаются различные схемы: кинематические, гидравлические, электрические и другие.
Кинематические схемы отображают связь и взаимодействие между подвижными элементами устройства, гидравлические – показывают систему управления посредством жидкости, а электрические схемы поясняют принцип работы и взаимосвязь между элементами электрического устройства.
На схемах детали изображаются упрощенно, посредством условных обозначений, установленных стандартами. На переднем форзаце показана кинематическая схема вертикально-сверлильного станка с наглядным пояснением условных обозначений
сборочных единиц и деталей.
Схемы являются неотъемлемой частью комплекта конструкторских документов для многих изделий и вместе с другими графическими материалами дают сведения, необходимые при проектировании, изготовлении, монтаже, эксплуатации и изучении изделий. Они широко используются как иллюстрации к различным описаниям, наглядно разъясняя связь между элементами изделий и принцип их работы.
Схемы строят с учетом следующих требований:
Упрощенные изображения и условные обозначения для элементов различных систем выполняют согласно стандартам
ЕСКД.
Условные знаки, не требующие соблюдения масштаба, вычерчивают с сохранением одинаковых размеров при повторении их на одной и той же схеме. Выполняются они в прямоугольной или аксонометрической (наглядной) проекциях.
Надписи на схемах дают краткие и предельно ясные. Выполняют их стандартным чертежным шрифтом.
Условные изображения, отличающиеся от установленных стандартами ЕСКД, которые оказалось необходимым использовать в схеме, должны быть пояснены.
Чтение схемы начинают с общего ознакомления, обзора схемы. По условным обозначениям элементов устанавливают вид схемы. Затем подробно рассматривают элементы схемы по их условным изображениям и буквенным обозначениям: определяют точные наименования всех элементов, уточняют их характеристики, используя для этого спецификацию.
Завершается чтение схемы полным уяснением принципа работы всего устройства и назначения всех его элементов путем последовательного выяснения связей между ними.
Таблица 1 Основные виды звеньев, используемых в механизмах
Таблица 1. Основные виды звеньев, используемых в механизмах
| Наименование | Определение | Внешний вид и условное обозна на кинематической схеме |
| Стойка | Звено, принимаемое за неподвижное | |
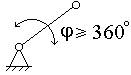
| Кривошип | Вращающееся звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси. | |
|
Кулиса | | |
| | | |
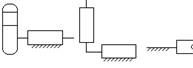
| Звено рычажного механизма, образующее поступательную пару со стойкой. | ||
| Ползун | | |
| Шатун | Звено рычажного механизма, образующее кинематические пары только с подвижными звеньями. | |
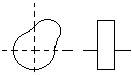
| Кулачок | Звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны. | |
Условные обозначения звеньев и кинематических пар
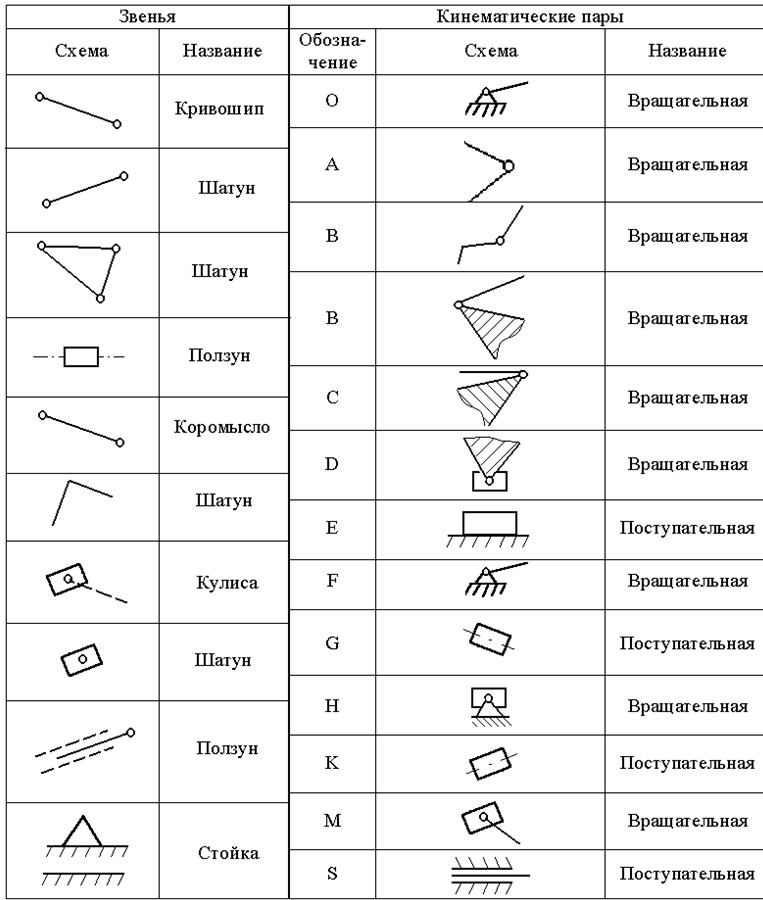
Наименование Определение Внешний вид и условное обозначение на кинематической схеме
Стойка Звено, принимаемое за неподвижное
Кривошип Вращающееся звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси.
Коромысло Вращающееся звено рычажного механизма, которое может совершать только неполный оборот вокруг неподвижной оси.
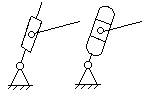
Кулиса Звено рычажного механизма, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступа-тельную пару.
Ползун Звено рычажного механизма, образующее поступательную пару со стойкой. Шатун Звено рычажного механизма, образующее кинематические пары только с подвижными звеньями.
Кулачок Звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны.
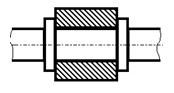
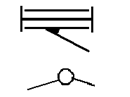
Таблица 2 Основные виды кинематических пар
Таблица 2. Основные виды кинематических пар
| № пары | Звенья, образующие кинематическую пару | Структурная схема кинематической пары | Наименование кинемат. пары |
| 1 | | | Вращательная |
| 2 | | | Вращательная |
| 3 | | | Вращательная |
| 4 | | | Вращательная |
| 5 | | | Поступательная |
| 6 | | | Вращательная |
| 7 | | | Поступательная |
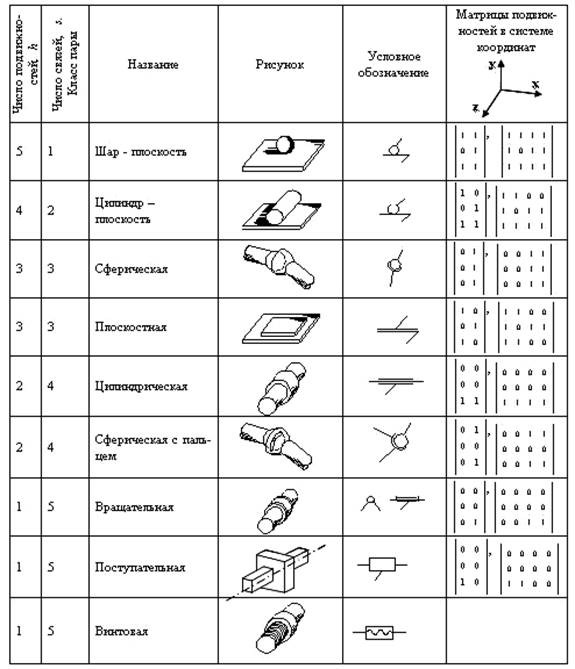
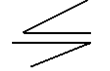
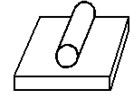
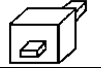
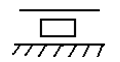
| Класс | Количество связей | Количество (вид) возможных относительных движений | Название | Условно- конструктивное изображение | Обозначение в структурных схемах |
| 1-й | 1 | 5 | Шар – плоскость | | |
| 2-й | 2 | 4 | Шар – цилиндр | | |
| 2-й | 2 | 4 | Цилиндр – плоскость | | |
| 3-й | 3 | 3 | Сферическая | | |
| 3-й | 3 | 3 | Плоскостная | | |
| 4-й | 4 | 2 | Цилиндри- ческая | | |
| 4-й | 4 | 2 | Зубчатая | | |
| 4-й | 4 | 2 | Сферическая с пальцем | | |
| 5-й | 5 | 1 | Поступа- тельная | | |
| 5-й | 5 | 1 | Вращательная | | |
| 5-й | 5 | 1 | Винтовая | | |









Порядок выполнения работы:
Ознакомиться с моделью механизма, установить его назначение (например, преобразование вращательного движения в поступательное), определить число звеньев и кинематических пар. Составить кинематическую схему механизма без учета масштаба, обозначив на ней размеры, подлежащие измерению.
Измерить расстояние между центрами шарниров, расстояние до неподвижных направляющих, углы между плечами звеньев. Составить таблицу параметров звеньев механизма.
Выделить неподвижные элементы кинематических пар, принадлежащие стойке (базовые точки и линии) и нанести их на схему с учетом выбранного масштабного коэффициента длинны , указав расстояния в миллиметрах непосредственно на чертеже. За начало координат базовых точек и линий принять центр вращения кривошипа.
Вычертить одно из положений ведущего звена, при котором в механизме нет наложения одного звена на другое. Показать стрелкой направление движения ведущего звена.
В выбранном масштабе вычертить кинематическую цепь, образованную остальными звеньями механизма, используя метод планов положений звеньев.
Пронумеровать звенья римскими цифрами, а кинематические пары – арабскими цифрами. Кроме того, центры вращательных кинематических пар обозначить прописными буквами латинского алфавита. Указать масштабный коэффициент длинны, использованный при построении кинематической схемы.Содержание отчета: Наименование и цель работы Кинематическая схема своего варианта
Расчеты
Вычертить одно из положений ведущего звена, при котором в механизме нет наложения одного звена на другое. Показать стрелкой направление движения ведущего звена.
В выбранном масштабе вычертить кинематическую цепь, образованную остальными звеньями механизма, используя метод планов положений звеньев.
Пронумеровать звенья римскими цифрами, а кинематические пары – арабскими цифрами. Кроме того, центры вращательных кинематических пар обозначить прописными буквами латинского алфавита. Указать масштабный коэффициент длинны, использованный при построении кинематической схемы.Содержание отчета: Наименование и цель работы Кинематическая схема своего варианта
Расчеты
Выводы по работе
Мастер п/о В.В.Тарапунов
Вычертить одно из положений ведущего звена, при котором в механизме нет наложения одного звена на другое. Показать стрелкой направление движения ведущего звена.
В выбранном масштабе вычертить кинематическую цепь, образованную остальными звеньями механизма, используя метод планов положений звеньев.
Пронумеровать звенья римскими цифрами, а кинематические пары – арабскими цифрами. Кроме того, центры вращательных кинематических пар обозначить прописными буквами латинского алфавита. Указать масштабный коэффициент длинны, использованный при построении кинематической схемы.Содержание отчета: Наименование и цель работы Кинематическая схема своего варианта
Расчеты
Выводы по работе
Мастер п/о В.В.Тарапунов



2













Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ



