Росиия, Ростов на Дону


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 15.02.2022 17:50
Филатова Наталья Михайловна
Педагог- организатор, педагог дополнительного образования
73 года
Местоположение
Специализация
ТЕХНИЧЕСКИЙ ПАСПОРТ ЭКСПОНАТА Квадрокоптер.
Категория:
Технология (мальчики)
02.04.2018 17:27

Просмотр содержимого документа
«ТЕХНИЧЕСКИЙ ПАСПОРТ ЭКСПОНАТА Квадрокоптер.»
ТЕХНИЧЕСКИЙ ПАСПОРТ
ЭКСПОНАТА
Квадрокоптер.
МБУ ДО Ворошиловского района города Ростова-на-Дону «ЦДТ»
д.о. «Юные техники»
п.д.о. Филатова Н.М.
DRONE
Quadrocopter
quad - четыре
copter - вертолет
(вертолёт с четырьмя винтами)
Общая, краткая информация.
Пропеллеры приводятся в движения четырьмя бесколлекторными двигателями и создают движущую силу тяги.
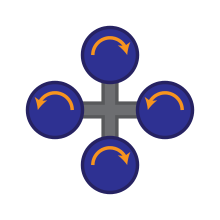
Для компенсации реактивного момента, два мотора вращаются по часовой стрелке и два против часовой стрелки и уравновешивают реактивные моменты. Поэтому применяются винты двух типов. Два винта правого вращения CW (clockwise) для вращения по часовой стрелке и два винта левого вращения CCW (counterclockwise) для вращения против часовой стрелки. Чтобы толкать воздух вниз пропеллер должен крутиться в направлении верхней кромки лопасти. Для того, чтобы добиться одинакового направления тяги при разном направлении вращения - лопасти у пропеллеров установлены зеркально противоположно.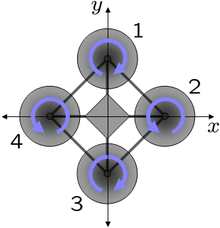
Устанавливаются моторы и винты следующим образом:
Передний левый и задний правый - моторы и винты правого вращения. (CW)
Передний правый и задний левый - моторы и винты левого вращения. (CCW)
Чтобы квадрокоптер держался в воздухе, необходимо чтобы все четыре мотора/пропеллера создавали силу тяги, компенсирующую силу тяжести квадрокоптера.
Если увеличить обороты всех моторов - квадрокоптер будет подниматься, а если уменьшить - опускаться.
Если увеличить обороты на двух правых моторах - квадрокоптер наклонится и полетит влево.
Если увеличить обороты на двух задних моторах - квадрокоптер наклонится и полетит вперёд.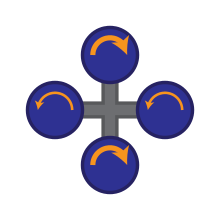
Если увеличить обороты моторов, вращающихся по часовой стрелке, и в равной мере уменьшить обороты моторов, вращающихся против часовой стрелки, то реактивный момент раскомпенсируется и квадрокоптер начнет поворачиваться против часовой стрелки.
Оси, вокруг которых, осуществляется наклон (вращение) квадрокоптера относительно его центра инерции в авиационной терминологии называются тангаж, крен и рысканье, но мы используем англоязычные термины для их обозначения PITCH, ROLL и YAW.
Наклоны вперед - назад происходят по оси PITCH, влево - вправо по оси ROLL и вертикально вокруг оси YAW.
Оборотами бесколлекторных моторов (brushless motor) управляют четыри микрокомпьютера (по одному на каждый мотор) Они называются регуляторами скорости (ESC. Electronic Speed Controller), они в свою очередь управляются микрокомпьютером, называемым "полетным контроллером" (FC. Flight Controller). Связь между ними реализуется по специальному протоколу передачи данных (DSHOT600). Питание электроники осуществляется от литий-полимерного аккумулятора через плату распределения питания (PDB. Power Distribution Board).
Управление осуществляется радиоаппаратурой управления, передающей сигнал на приемник, установленный на квадрокоптере и снабженный специальной антенной. Приёмник передаёт данные на полетный контроллер (по протоколу SBUS (инвертированный UART), а тот в свою очередь, учитывая данные с гироскопа и акселерометра, проводит математические операции по корректировки ориентации дрона в пространстве и сообщает регуляторам скорости необходимую информацию.
Литий-полимерный аккумулятор. Li-Po
Аккумуляторная батарея состоит из четырех аккумуляторов и имеет два разъема. Номинальное напряжение одного аккумулятора составляет 3.7В (Полностью заряженный 4.2В, а полностью разряженный 3.3В). Итоговое напряжение силового разъема заряженной батареи будет равно 16.8В. Балансировочный разъем необходим для контроля напряжения каждого элемента аккумуляторной батареи. Количество энергии, которое аккумулятор может в себе хранить, называется ёмкостью и измеряется в ампер-часах (Ah). Мы используем батарею емкостью 1800 mAh и весом в 160г с токоотдачей ~100A., что обеспечит нам полетное время около 3-5 минут при максимальной нагрузке.
Для зарядки Li-Po аккумуляторов используется специальное зарядное устройство (ISDT) с возможностью разряда, заряда, перевода в режим хранения, балансировки и с возможностью замера внутреннего сопротивления каждого из аккумуляторов.
Для питания зарядного устройства используется блок питания предназначенный для компьютера (Подключаем по линии 12В PCI).
Альтернативный источник питания: связка высокотоковых аккумуляторов типа 18650 (Li-ion, незащищенный). Большая ёмкость, но больше вес и меньше токоотдача.
PDB. Плата распределения питания.
Интегрирована в плату полетного контроллера. Присутствует датчик тока, позволяющий следить за состоянием аккумулятора и не допускать его переразрядки.
Обеспечивает питанием полетный контроллер, регуляторы и имеет BEC на 5v и 9v для питания.
Для микро квадрокоптера PDB интегрирована в плату ESC 4in1. Датчик тока отсутствует. BEC только на 5v.
Вход питания на PDB плату (обязательно) защищен Low ESR (обязательно) конденсатором. (используется оригинальный японский Low ESR Capacitor panasonic).
FC. Полетный контроллер.
Полетный контроллер на базе STM32 F4 микроконтроллера располагает на борту гироскоп и акселерометр (MPU6000 для микро или обычного квадрокоптера и требовательный к лучшей виброразвязке ICM20602 для гоночного).
Программное обеспечение: Betaflight configurator.
Прошивка микроконтроллера: Betaflight 3.2.0
Настройка и калибровка проводилась итерационно, через серию отдельный лётных испытаний. Для разбора телеметрии полёта используется черный ящик (blackbox), собирающий данные в течение всей работы квада и записывающий их в память (или на карту памяти)

ESC. Регуляторы оборотов.
На базе STM32F051 микроконтроллера.
Программное обеспечение: BLHeli_32 configurator.
Прошивка BLHeli_32.
Настройка и калибровка проводилась итерационно, через серию отдельный лётных испытаний.
BL Motors. Моторы и пропеллеры.

RX. Приемник аппаратуры и антенна.
Питание приемника осуществляется через встроенный в FC(или ESC) - BEC на 5v.
После первого летного испытания, мы обнаружили серьезные проблемы с работой приемника, а именно его внезапное отключение. После проведенного исследования, мы определили, что проблема вызвана радио-помехами исходящими от проводов и высокоточных регуляторов. Мы решили экранировать приёмник металлом.
C. Курсовая камера.
Пока отсутствует.
C. Action камера.
Пока отсутствует.
TX. Видеопередатчик и антенна.
Пока отсутствует.
OSD. Телеметрия.
Пока отключена.
Элементы структурной цельности:
Карбоновая рама обеспечивает максимальную прочность при минимальном весе.
Каркас безопасности защищает электронную начинку. (Алюминиевый и карбоновый)
Виброразвязка минимизирует влияние вибрации на датчики(гироскоп, акселерометр и т.д.). (Силиконовые и нейлоновые стойки и прокладки)
Элементы защиты от физического повреждения. (Алюминиевые щиты на лучах)
Защита от радиопомех. (Металлические экраны)
Облегчение веса. (Нейлоновые болты и гайки. Карбоновые, алюминиевые материалы)
Аппаратура управления.
Руль управления наклоном по оси ROLL называется Aileron, а канал управления сокращается до A.
Руль управления наклоном по оси PITCH называется Elevator, а канал управления сокращается до E.
Руль управление скоростью называется Throttle и канал обозначается буквой Т.
Руль управление поворотом по оси YAW называется Rudder и канал обозначается буквой R.
Переключатель A запрограммирован на ARM/DISARM квадрокоптера. Т.е. на запуск моторов. Канал управления обозначается цифрой 1.
Переключатель C запрограммирован на смены режимов работы квадрокоптера. ACRO/BEEPER/HORIZON. Канал управления обозначается цифрой 3.
Используется следующая маска каналов управления AETR13.
Выполнена калибровка каналов управления согласно требованиям прошивки полетного контроллера.
Зарядное устройство.
Питание осуществляется от PC PSU. От 12 вольтовой высокоточной линии PCI-E.
Используется алгоритм зарядки Li-Po для хранения или полной зарядки током не превышающим 1C. (1C = 1 х емкость аккумулятора).
Симулятор управления.
Для получения базовых навыков и понимания техники управления использовались симуляторы полетов (The Drone Racing League High Voltage).
На аппаратуре выключается радио модуль, извлекается только PWM сигнал. Аппаратура подключается к звуковой карте компьютера, на основе входящего PWM сигнала работает виртуальный джойстик.
VR. Очки виртуальной реальности.
Пока отсутствует.
Стендовые испытания:
Поиски проблемы отключения приемника. (полностью фиксированный квад)
Оказалось, что проблема вызвана радио-помехами исходящими от проводов и высокоточных регуляторов. После экранирования приемника металлом проблема исчезла.
Лётные испытания:
Настройки PID'ов для минимизации вибрации. (при одной свободной оси вращения)
видео: https://www.youtube.com/watch?v=83q-xR9pVgU
Определение тяги микро квадрокоптера. На аккумуляторе Li-Po 450mAh, квадрокоптер показал тягу в 225г. (свободная тяга 125г.)
видео: https://www.youtube.com/watch?v=kxAdZy6foO8
Аварии:
Отключение приемника, взлёт и падение с высоты. (сильное повреждение одного из моторов)
Многочисленные столкновения микро квада со стенами. (фатальные повреждения пропеллеров и их замена)
MICRO DRONE Specifications
Тяговооруженность: 3
Мощность 130W
Полетное время: от 93 сек.
RACING DRONE Specifications
Тяговооруженность: 12
Мощность 2000W
Полетное время: от 50 сек.
Схема подключения регуляторов получается вот такой:
X 1234
1 | 2 C4 | A1
----- -------
4 | 3 C3 | C2
ESC FC
GND GND (black)
5v != 5v (red)
1 2 (green)
2 3 (yellow)
3 4 (teal)
4 1 (orange)
ESC
BrGYTO
.....
YTOGrB
FC







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

