
, ГПОУ "Читинский техникум отраслевых технологий и бизнеса", г. Чита, Забайкальский край


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 11.09.2025 06:43

Батуев Б. Н.
Преподаватель профмодуля
70 лет
Местоположение
Специализация
4 Пара сил
Категория:
Прочее
06.09.2016 15:40

Просмотр содержимого документа
«4 Пара сил»
ПЛОСКАЯ СИСТЕМА ПАР СИЛ
- ГПОУ «Читинский техникум отраслевых технологий и бизнеса»
Презентация по технической механике
на тему « Плоская система пар сил »
- Разработал: преподаватель Батуев Б. Н.
- Чита - 2015
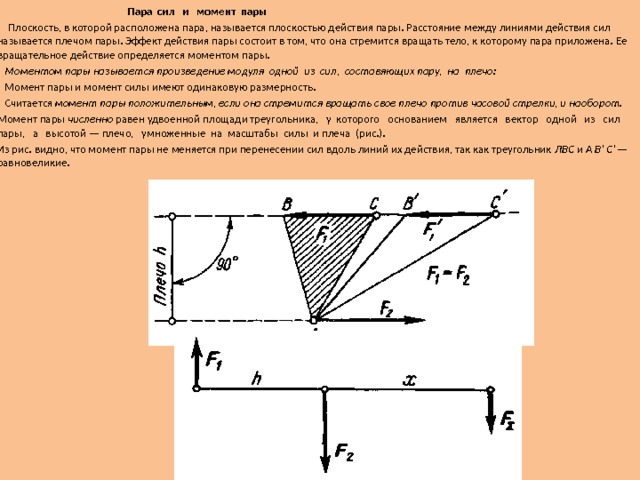
- Пара сил и момент пары
- Плоскость, в которой расположена пара, называется плоскостью действия пары. Расстояние между линиями действия сил называется плечом пары. Эффект действия пары состоит в том, что она стремится вращать тело, к которому пара приложена. Ее вращательное действие определяется моментом пары.
- Моментом пары называется произведение модуля одной из сил, составяющих пару, на плечо:
- Момент пары и момент силы имеют одинаковую размерность.
- Считается момент пары положительным, если она стремится вращать свое плечо против часовой стрелки, и наоборот.
- Момент пары численно равен удвоенной площади треугольника, у которого основанием является вектор одной из сил пары, а высотой — плечо, умноженные на масштабы силы и плеча (рис.).
- Из рис. видно, что момент пары не меняется при перенесении сил вдоль линий их действия, так как треугольник ЛВС и А В' С' — равновеликие.
- Пара сил и момент пары
- В § 3.2 нами был исключен из рассмотрения случай сложения двух антипараллельных сил, равных по модулю. Такая система сил называется парой сил или просто парой (рис. 4.1).
- Понятие пары сил введено в механику в начале XIX в. французским ученым Пуансо (1777—1859), который разработал теорию пар.
- Плоскость, в которой расположена пара, называется плоскостью действия пары. Расстояние между линиями действия сил есть плечо пары. Эффект действия пары состоит в том, что она стремится вращать тело, к которому пара приложена. Ее вращательное действие определяется моментом пары.
- Моментом пары называется произведение модуля одной из сил, составляющих пару, на плечо:
- Момент пары и момент силы имеют одинаковую размерность.
- Условимся считать момент пары положительным, если она стремится вращать свое плечо против часовой стрелки, и наоборот.
- Момент пары численно равен удвоенной площади треугольника, у которого основанием является вектор одной из сил пары, а высотой — плечо, умноженные на масштабы силы и плеча (рис.).
- Из рис. видно, что момент пары не меняется при перенесении сил вдоль линий их действия, так как треугольник ЛВС и А В' С' — равновеликие.
 Р± . Тогда равнодействующая этих сил Г^ = Г 2 — Г 1 , а точка ее приложения определяется из пропорции Р^1Р 1 = Н/х, откуда х = Р 1 Н/Р^. Пусть теперь сила Р 2 уменьшается и приближается по модулю к силе Р 1 , тогда в пределе при Р± = Р 2 Это значит, что при Р\ = Рг равнодействующая не существует. Из этой теоремы следует, что пара сил не может быть уравновешена одной силой; пара сил может быть уравновешена только парой. Теорема II. Алгебраическая сумма моментов сил, составляющих пару, относительно любой точки плоскости действия пары есть величина постоянная, равная моменту пары. Дана пара (Б\,Р 2 ) с плечом И (рис. 4.3) и моментом т = Р 1 Н = Р 2 Н. Выберем в плоскости действия пары произвольную точку А и примем ее за центр моментов: Сложим правые и левые части этих равенств: М А (^^] + Р 2 }=-Р1а + Р 2 (а + п) = Р 2 п, или М А {Я 1 ) + М А (Я 2 ) = т; теорема доказана. 29 А*- Рис. 4.3 Из этой теоремы следует, что при любом центре моментов пара сил войдет в уравнение моментов с одним и тем же знаком и одной и той же величиной. Теорема III. Алгербраическая сумма проекций сил пары на ось всегда равна нулю. Дана пара (Б\, Г 2 ) и ось 2, лежащая в плоскости действия пары (рис. 4.4). Из равенства заштрихованных треугольников видно, что Р 1г = Р 2 .,. Проекция Р 1г — положительная, проекция Р 22 — отрицательная, следовательно, их алгебраическая сумма всегда равна нулю. Из этой теоремы следует, что пара сил не входит ни в уравнение сил, ни в уравнение проекций сил. " width="640"
Р± . Тогда равнодействующая этих сил Г^ = Г 2 — Г 1 , а точка ее приложения определяется из пропорции Р^1Р 1 = Н/х, откуда х = Р 1 Н/Р^. Пусть теперь сила Р 2 уменьшается и приближается по модулю к силе Р 1 , тогда в пределе при Р± = Р 2 Это значит, что при Р\ = Рг равнодействующая не существует. Из этой теоремы следует, что пара сил не может быть уравновешена одной силой; пара сил может быть уравновешена только парой. Теорема II. Алгебраическая сумма моментов сил, составляющих пару, относительно любой точки плоскости действия пары есть величина постоянная, равная моменту пары. Дана пара (Б\,Р 2 ) с плечом И (рис. 4.3) и моментом т = Р 1 Н = Р 2 Н. Выберем в плоскости действия пары произвольную точку А и примем ее за центр моментов: Сложим правые и левые части этих равенств: М А (^^] + Р 2 }=-Р1а + Р 2 (а + п) = Р 2 п, или М А {Я 1 ) + М А (Я 2 ) = т; теорема доказана. 29 А*- Рис. 4.3 Из этой теоремы следует, что при любом центре моментов пара сил войдет в уравнение моментов с одним и тем же знаком и одной и той же величиной. Теорема III. Алгербраическая сумма проекций сил пары на ось всегда равна нулю. Дана пара (Б\, Г 2 ) и ось 2, лежащая в плоскости действия пары (рис. 4.4). Из равенства заштрихованных треугольников видно, что Р 1г = Р 2 .,. Проекция Р 1г — положительная, проекция Р 22 — отрицательная, следовательно, их алгебраическая сумма всегда равна нулю. Из этой теоремы следует, что пара сил не входит ни в уравнение сил, ни в уравнение проекций сил. " width="640"
- Основные свойства пары
- Основные свойства пары характеризуются следующими тремя теоремами.
- Теорема I. Пара сил не имеет равнодействующей.
- Дана пара (Б\, Р 2 ) с плечом И (рис. 4.2).
- Предположим, что Р 2 Р± . Тогда равнодействующая этих сил Г^ = Г 2 — Г 1 , а точка ее приложения определяется из пропорции
- Р^1Р 1 = Н/х, откуда х = Р 1 Н/Р^.
- Пусть теперь сила Р 2 уменьшается и приближается по модулю к силе Р 1 , тогда в пределе при Р± = Р 2
- Это значит, что при Р\ = Рг равнодействующая не существует.
- Из этой теоремы следует, что пара сил не может быть уравновешена одной силой; пара сил может быть уравновешена только парой.
- Теорема II. Алгебраическая сумма моментов сил, составляющих пару, относительно любой точки плоскости действия пары есть величина постоянная, равная моменту пары.
- Дана пара (Б\,Р 2 ) с плечом И (рис. 4.3) и моментом т = Р 1 Н = Р 2 Н.
- Выберем в плоскости действия пары произвольную точку А и примем ее за центр моментов:
- Сложим правые и левые части этих равенств: М А (^^] + Р 2 }=-Р1а + Р 2 (а + п) = Р 2 п, или М А {Я 1 ) + М А (Я 2 ) = т; теорема доказана.
- 29
- А*-
- Рис. 4.3
- Из этой теоремы следует, что при любом центре моментов пара сил войдет в уравнение моментов с одним и тем же знаком и одной и той же величиной.
- Теорема III. Алгербраическая сумма проекций сил пары на ось всегда равна нулю.
- Дана пара (Б\, Г 2 ) и ось 2, лежащая в плоскости действия пары (рис. 4.4). Из равенства заштрихованных треугольников видно, что Р 1г = Р 2 .,. Проекция Р 1г — положительная, проекция Р 22 — отрицательная, следовательно, их алгебраическая сумма всегда равна нулю.
- Из этой теоремы следует, что пара сил не входит ни в уравнение сил, ни в уравнение проекций сил.
- Эквивалентные пары
- Две пары называются эквивалентными, если одну из них можно заменить другой, не нарушая механического состояния свободного твердого тела.
- Теорема об эквивалентных парах формулируется так: если
- моменты двух пар алгебраически равны, то эти пары эквивалентны.
- Даны две пары (Б\ Б\) и ((}, С^), моменты которых алгебраически равны (рис. 4.5), т. е.
- М(Г, Р 1 ) = М(д, д^ или Ра = ^Ъ.
- Продолжим линии действия сил пары до их взаимного пересечения в точках А и В. На основании следствия из аксиом III и IV перенесем силы Р и Б\ вдоль линий их действия в точки А и В. Соединим эти точки прямой линией и разложим силы Г и Г 1 по направлению А В и вдоль линий действия сил (} И (^ .
- Из равенства треугольников Акс1 и Втп вытекает, что Т= 7\ и 5 = 5^
- Силы Т и Т\ представляют собой уравновешенную систему, так как они равны по модулю и действуют по одной прямой в противоположные стороны. На основании аксиомы IV такую систему можно отбросить.
- Силы 8 и 85 представляют собой пару сил с плечом Ь. Таким образом, пара (Г, 1
- Рассмотрим треугольник АтВ и АпВ. Они имеют общее основание А В, а высоты их равны, следовательно,
- пл. &АтВ = пл. АпВ.
- Но удвоенная площадь &АпВ численно равна моменту пары (Г, РД а удвоенная площадь ЬАтВ численно равна моменту пары (8,8^, следовательно, М(Р, Р 1 ) = М(8, 85) или Ра = 5Ь.
- По условиям теоремы Га = ()Ь, следовательно, 5Ь = ()Ь, отсюда 5=2, $1 = (?!•
- Силы 8 и 0 равны по модулю, действуют по одной прямой в одну сторону, следовательно, они эквивалентны друг другу; на этом же основании эквивалентны друг другу силы !§! и С^. Следовательно, пара ((), (2^ = паре (8, 8/).
- Но выше доказано, что пара (Р, Б\) = паре (8, 8^.
- Так как две пары порознь эквивалентны одной и той же третьей паре, то эти пары эквивалентны между собой, т. е.
- пара (Р, Б 1 ! ) = паре (О, д г ),
- что и требовалось доказать.
- Из доказанной теоремы об эквивалентных парах вытекает четыре следствия: т
- не изменяя механического состояния тела, пару можно перемещать как угодно в плоскости ее действия;
- не изменяя механического состояния тела, можно менять силы и плечо пары, но так, чтобы ее момент оставался неизменным;

чтобы задать пару, достаточно задать ее момент, поэтому иногда слово «пара» заменяют словом «момент» и условно изображают его так, как показано на рис. 4.6;
- условия равновесия плоской системы параллельных сил будут справедливы, если вместе
- с такой системой действуют и пары сил, так как их можно повернуть в плоскости действия и поставить силы пары параллельно другим силам системы.

- Теорема о сложении пар
- Теорема. Всякая плоская система пар эквивалентна одной результирующей паре, момент которой равен алгебраической сумме моментов данных пар.
- Пусть даны три пары с моментами т± , т 2 , га 3 , действующие в одной плоскости (рис. 4.7, а).
- На основании следствия из теоремы об эквивалентных парах преобразуем эти пары так, чтобы их плечи стали равными с1, и перенесем к произвольно взятому на плоскости отрезку А В длиной А.
- Тогда вместо заданной системы пар получим новую систему, эквивалентную данной, причем моменты данных и новых пар будут равны, т. е.
- Сложив три силы в точке А, получим равнодействующую (рис. б,), модуль которой
- Сложив три силы в точке В, получим равнодействующую К 2 , модуль которой причем очевидно, что силы 1^ и К 2 равны по модулю, параллельны и противоположно направлены.
- Значит, система (К 1? К 2 ) представляет собой пару с плечом А, эквивалентную данной системе пар.
- Момент этой результирующей пары или
- Аналогичное доказательство можно привести для любой плоской системы пар, т. е. в общем виде можно записать
- что и требовалось доказать.

- Условие равновесия плоской системы пар
- Применяя доказанную в предыдущем параграфе теорему к плоской системе пар, находящейся в равновесии, запишем
- m = Σmi = 0
- Поэтому условие равновесия плоской системы пар в общем виде будет выглядеть так: Σmi = 0 ,
- а формулируется следующим образом: для равновесия плоской системы пар необходимо и достаточно, чтобы алгебраическая сумма моментов данных пар равнялась нулю.

- Опоры балок
АВ–прямая балка;
F-внешняя (активная) сила
1) (∙)А - шарнирно-подвижная опора ;
2) (∙)В - шарнирно-неподвижная опора;

- 3) (∙)С - жесткая заделка.

Опорные реакции и направления реакций связей.
- Шарнирно-подвижная опора: реакция связи (реактивная сила) R A направлена перпендикулярно опорной плоскости и неизвестна только по модулю (одно неизвестное).

- Шарнирно-неподвижная опора
- Реакция R B направлена перпендику-лярно оси шарнира; модуль и направление заранее не известны (2 неизвестных). При решении задач реакцию разлагают на 2 взаимно перпендикулярные составляющие X B и Y B , не известные по модулю, но известные по направлению.

- Жесткая заделка (защемление)
- заменяют реактивной силой R C , не известной по модулю и направлению (ее разлагают на две взаимно перпен-дикулярные составляющие X C и Y C) + реактивным моментом M (три неиз-вестных).

- Если при решении задачи реактивная сила или реактивный момент получатся (-), то их действительное направление противоположно принятому на рисунке.
- Другие опоры:
а) свободная опора на повер-хность
б)ребро призмы

- Пример 1. Горизонтальная балка длиной l =4м закреплена на опорах и нагружена парой сил с моментом m=420 Н∙м. Определить реакции опор А и В.
- Дано: m=420 Н∙м l =4м
- Х А -? У А -? R B - ?

- Решение. Отбросим опоры, заменив их реакциями, и рассмотрим равновесие балки. Так как пару сил можно уравновесить только парой, то реакции R опор А и B должны образовывать пару сил, причем реакция шарнирно-подвижной опоры В перпендикулярна опорной плоскости.
- Применим условие равновесия плоской системы пар и составим уравнение равновесия:
- Σmi = 0; -m + Rh =0,
- где h = l cos 30⁰.
- Отсюда R = т/h = т/( l cos 30⁰) = 420/(4∙0,866)≈ 120 Н.

- Пример 2. Консольная балка длиной l = 1 м нагружена на конце силой F=3000 Н. Определить реакции заделки.

- Решение. Отбросим заделку, заменив ее реакциями, и рассмотрим равновесие балки. Реакции заделки представляют собой реактивную силу R и реактивный момент т. Так как реактивный момент т может быть уравновешен только парой сил, то нагрузка F и реакция R должны образовывать пару, следовательно, R = F = 3000 H.
- Далее применим условие равновесия плоской системы пар и составим уравнение равновесия: Σmi = 0; m – F l =0,
- откуда т = F l = 3000∙2 = 6000 Н∙м.
Решение примеров
- Список использованных источников
- 1. Эрдеди А.А. Техническая механика: Теоретическая механика. Сопротивление материалов. М.: 2005.
- 2. Автор и источник заимствования неизвестен.
Конец








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

