
Россия, Каменск-Шахтинский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 17.04.2026 10:21

Барышев Евгений Валентинович
педагог дополнительного образования
61 год
Местоположение
Специализация
Дихотомический робот
Категория:
Прочее
09.12.2022 15:48

Просмотр содержимого документа
«Дихотомический робот»
Муниципальное бюджетное учреждение
дополнительного образования «Станция юных техников»
города Каменск-Шахтинский
(Для учащихся второго года обучения)
Автор: Барышев Е. В.
педагог дополнительного образования.
2022 г.
1. Пояснительная записка.
Данная методическая разработка предназначена для ознакомления учащихся 2 года обучения с практическим занятием по теме 2.3. «Датчики»
На практическом занятии с помощью программы «Front Designer» учащиеся создают чертеж платформы робота. Для изготовления по чертежам можно предложить дихотомического робота, который может передвигаться по нарисованной линии.
Методическая разработка является приложением к образовательной программе «Робототехника» и направлена на достижение следующих целей и задач:
Образовательные:
• ознакомить учащихся с ВЕАМ технологиями в робототехнике;
• ознакомить учащихся с компьютерной программой «Front Designer;
• оказать помощь в реализации различных моделей поведения и применения ВЕАМ методов в робототехнике.
Развивающие:
• развитие интереса и склонностей в области спортивной робототехнике;
• развитие конструкторского и изобретательского мышления.
Воспитывающие:
• воспитание всестороннего интереса к технике, творческого отношения к труду;
• воспитание чувства взаимоуважения между кружковцами.
Работа рассчитана на учащихся объединения «Робототехника» в возрасте 12 – 18 лет. На изучение ВЕАМ – методов и изготовление мини робота отведено 5 занятий по 4 часа.
Сохраняя общую направленность материала, определяемую предлагаемой методической разработкой, преподаватель, должен иметь свой авторский демонстрационный материал, наглядное пособие, фотоматериал модели.
2. Введение
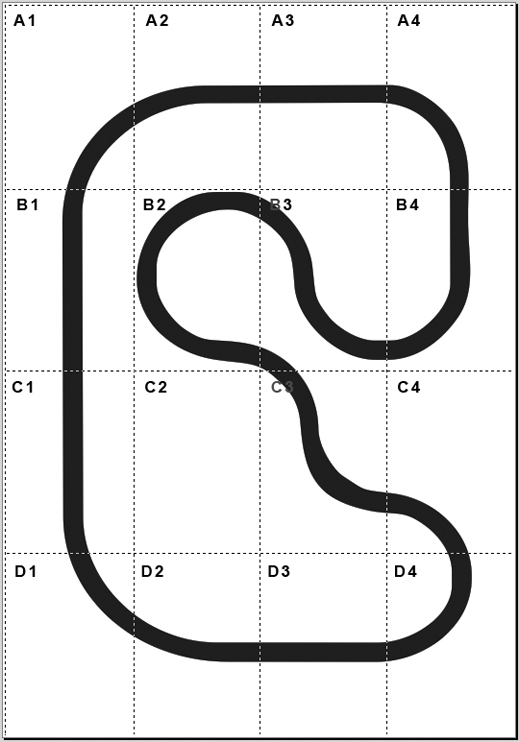
Дихотомический робот «дергунчик» - это простой робот из серии PaperBot, который способен бежать по нарисованной линии (трасса, приложение 3). Дихотомическим он называется потому, что для обнаружения и движения вдоль трассы использует только два сигнальных состояния от датчика ("0" и "1"). Отсюда способ передвижения, заключающийся в постоянном повороте влево вправо, по зигзагообразной траектории. Иначе говоря, он или видит линию или не видит.
Электрическая схема робота предельно простая и составляет всего два транзистора, одна цифровая микросхема и несколько мелких дополнительных радиокомпонентов.
Сборка робота рекомендуется для всех у кого изготовление печатной платы не вызывает проблему. В конструкции робота использованы широко доступные радиокомпоненты. Кроме того, сборка робота не требует специальных знаний и доступна каждому.
Характеристика и функциональность.
Робот рассчитан на движение по трассе шириной 20мм. Вы также можете самостоятельно разработать трассу, учитывайте, что ширина линии должна быть не менее 15мм.
Для обнаружения трассы на работе установлен один фототранзистор. Алгоритм обнаружения трассы основан на дихотомическом принципе, когда на выходе фототранзистора присутствует два логических уровня, высокий и низкий. Поэтому при движении по трассе робот постоянно пересекает её край, определяя разницу между тёмным и светлым участками.
Чтобы не усложнять конструкцию и сделать легко повторяемой в домашних условиях, моторы установлены под углом (фото 9). Такой способ крепления моторов позволяет обойтись без передаточных элементов (шестерёнок и т.д.).
Питание конструкции робота осуществляется напряжением 3 вольта от двух батареек типоразмера "AAA". Напряжение в 3 вольта является достаточным для правильной работы всей схемы и уверенного движения по трассе.
Технические характеристики:
Напряжение питания............................3В(2х1,5В)
Количество фотодатчиков.......................1шт
Количество моторов............................2шт
Ток потребления...............................80мА
3. Принцип работы.
На рис.1. показана электрическая схема робота. После включения выключателем S1 источника питания инфракрасный светодиод HL1 начинает излучать невидимое инфракрасное излучение, к которому очень чувствителен фототранзистор FT1.
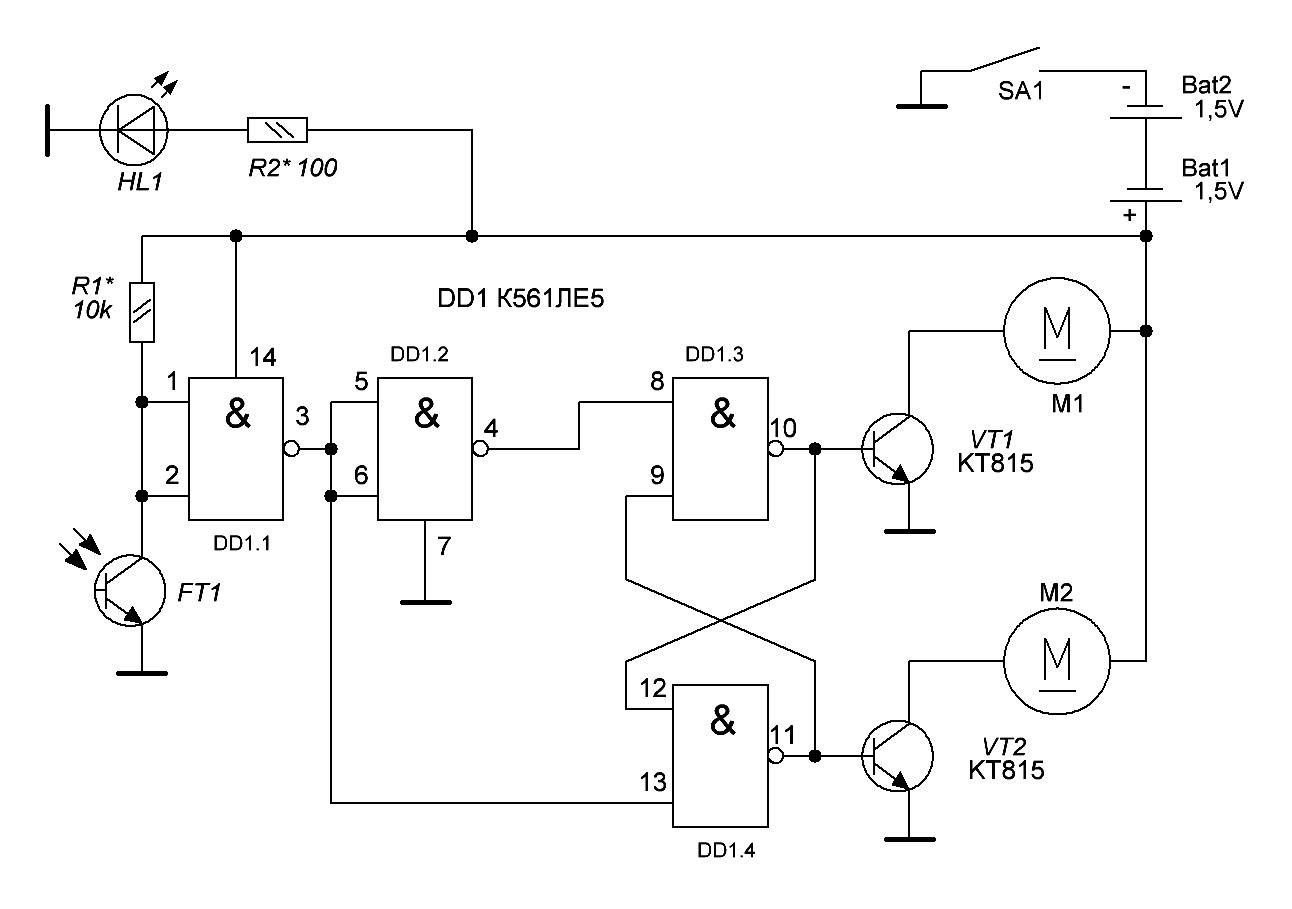
Рисунок 1. Принципиальная электрическая схема.
Допустим, робот находится на белом поле, фототранзистор FT1 максимально освещён отражённым, от белого поля, излучением. Это приводит к падению напряжения на его коллекторе. Фототранзистор и резистор R1 образуют делитель напряжения, к средней точке которого подключен на вход 1 и 2 элемента DD1.1, потенциал «высокого уровня» меняется на «низкий». Переключится триггер, построенный на элементах DD1.3, DD1.4, на его выходах 10 и 11 сменится потенциал с высокого на низкий. Транзистор VT1 закроется, вал мотора М1 остановится, а транзистор VT2 откроется и вал мотора М2 начнет вращаться.
Поскольку каждый из транзисторов управляет своим мотором, то и они будут, включаются поочерёдно. Поэтому при движении вперёд робот всё время поворачивает, то вправо, то влево, как бы дергается. Робот будет двигаться по границе черной и белой линии.
Если фототранзистор находится над черным полем, то освещенность инфракрасным светом падает, черный цвет поглощает излучение, фототранзистор закрывается. На входе 1 и 2, элемента DD1.1, потенциал «низкого уровня» поменяется на «высокий». Триггер опять переключится и вал мотора М2 остановится, а вал мотора М1 начнет вращаться. Когда робот оказывается вновь на белом поле трассы, все процессы повторяются снова.
Детали и материалы.
Радиокомпоненты для сборки робота
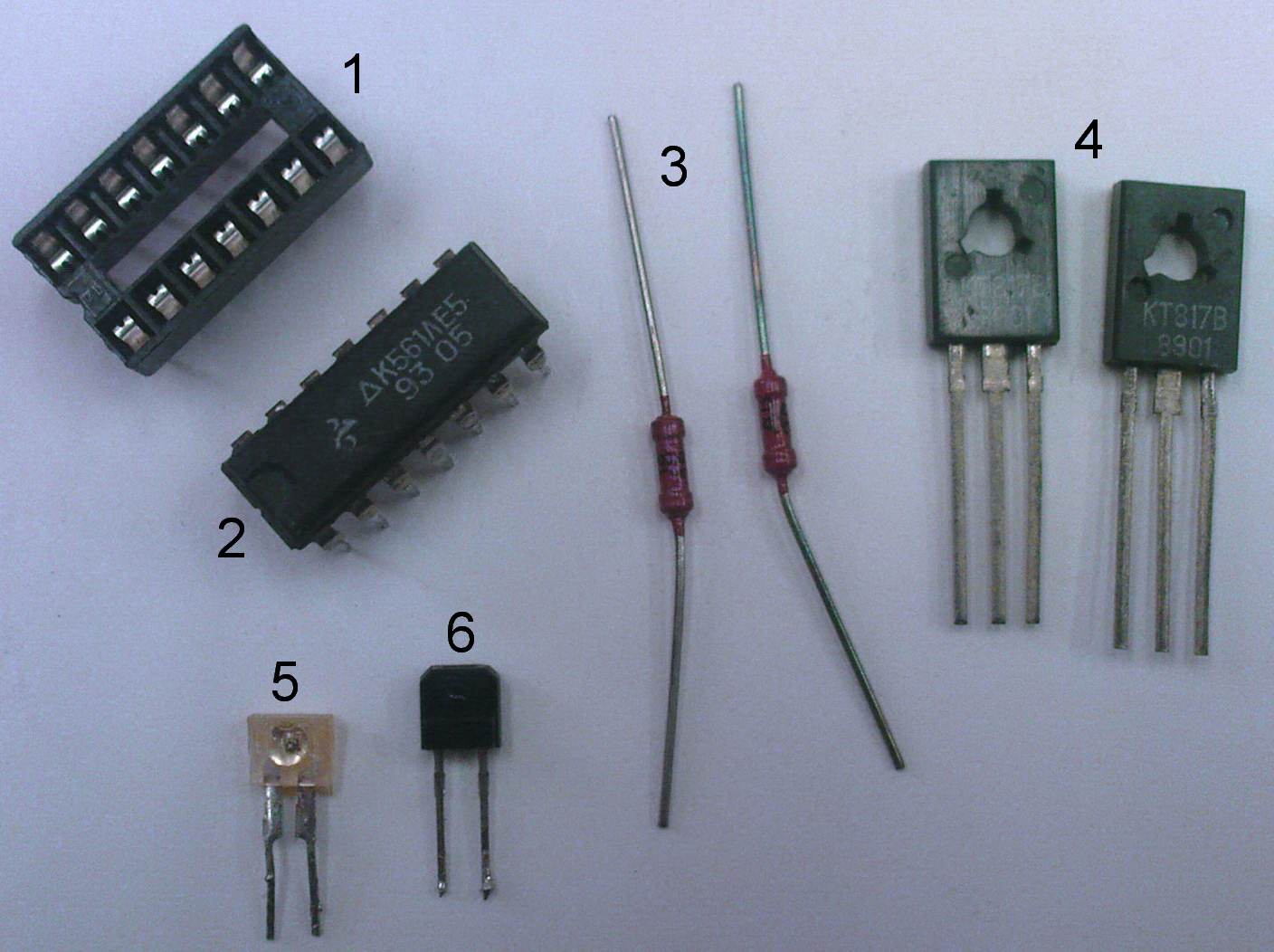
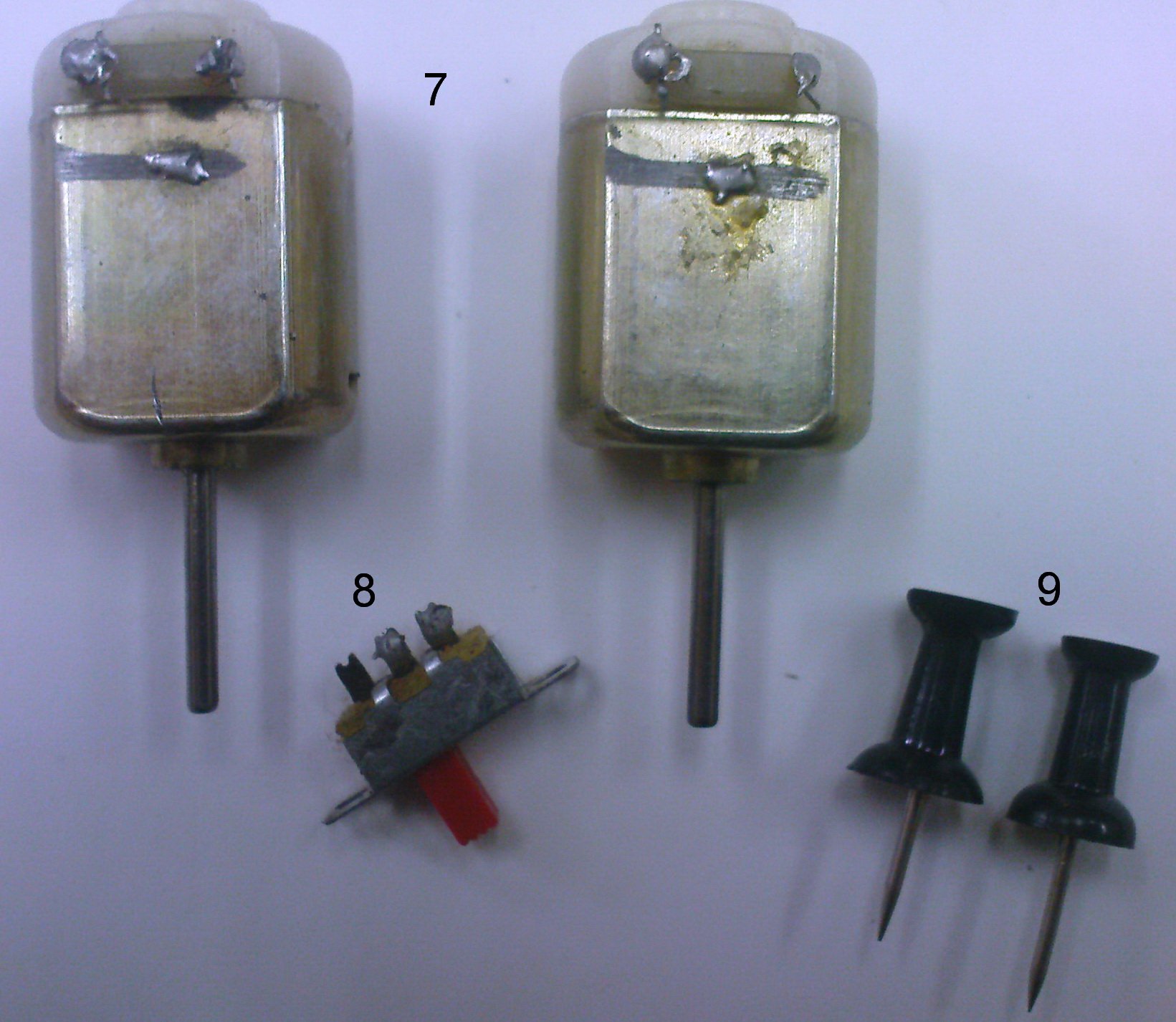
Фото 1.
1. Панелька для микросхемы…………….1шт.
2. Микросхема К176 ЛЕ5…………………1шт.
3. Резисторы 100 Ом, 10 кОм,…………....2шт.
4. Транзистор КТ815А...............................2шт.
5. Инфракрасный светодиод RBC-43-C....1шт.
6.Фототранзистор ФТ2К............................1шт.
7. Моторы низковольтный QX-FF-130.....2шт.
8. Микропереключатель.............................1шт.
9. Канцелярские кнопки…………………..2шт.
10. Провода………………………………300мм.
Примечание 1. Все радиокомпоненты и дополнительные элементы конструкции, которые не видны на фото 1 будут показаны на фотографиях в процессе сборки робота
Примечание.2. Транзистор КТ815 можно заменить на КТ817. Фототранзистор импортного производства можно заменить на ФТ2К. Все резисторы мощностью 0,125вт импортного или отечественного производства.
Для сборки робота потребуются следующие материалы и инструменты (фото 2).

Фото 2
Таблица.1.Список радиокомпонентов.
| Позиция | Наименование | Кол-во | Примечание |
| R1 | 10 ком | 1 |
|
| R2 | 100 ом | 1 |
|
| HL1 | RBC-43-C | 1 | ИК диод |
| FT1 | ФТ-2К | 1 | Фототранзистор |
| VT1, VT2 | КТ815 | 2 | Замена КТ817 |
| DD1 | К561ЛЕ5 | 1 | Микросхема Замена К176ЛЕ5 |
| M1, M2 | QX-FF-130 | 2 | Моторы низковольтные |
| Bat1, Bat2 | Батарейки | 2 | Типоразмер ААА |
| SA1 | Микропереключатель | 1 | Три вывода |
Примечание.3. Возможно, потребуется точнее подобрать сопротивление резистора R1. Его можно изменять, но в небольших пределах.
Пошаговая инструкция сборки робота.
Для успешной сборки точно следуйте инструкциям. Сборка робота выполняется по шаблонам и фотографиям.
Шаг.1.Изготовление монтажной платы.
Вырежьте шаблон печатной платы размером 51 х 28мм по контурным линиям, которая находится в приложении 2. Наклеить шаблон печатной платы с помощью скотча на фольгированный текстолит подходящих размеров.
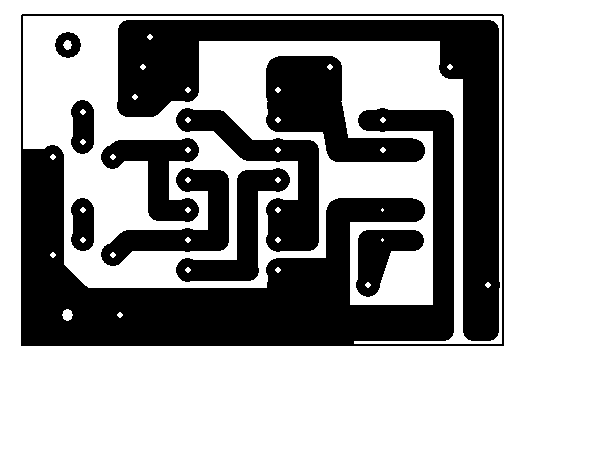
Фото 3.
Наметить все белые точки с помощью шила и молотка. Снять шаблон печатной платы с фольгированного текстолита. Нарисовать маркером все черные линии соединяющие намеченные точки.
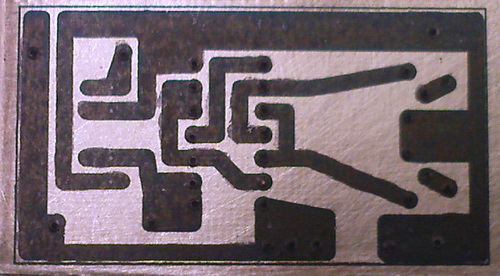
Фото 4.
После высыхания платы опустить в раствор хлорного железа (соблюдая правила безопасности) на 20 - 40 минут. После того как раствор растворит не закрашенную маркером медь нужно смыть тампоном, смоченным в растворителе, маркер с платы. Просверлить намеченные отверстия сверлом диаметром 1,0 мм. Зачистить плату мелкой наждачной бумагой и покрыть канифольным лаком.
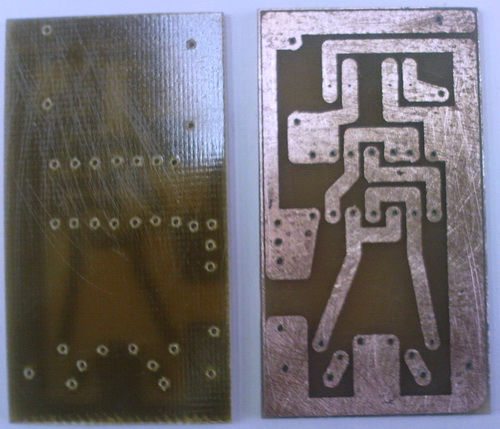
Фото 5.
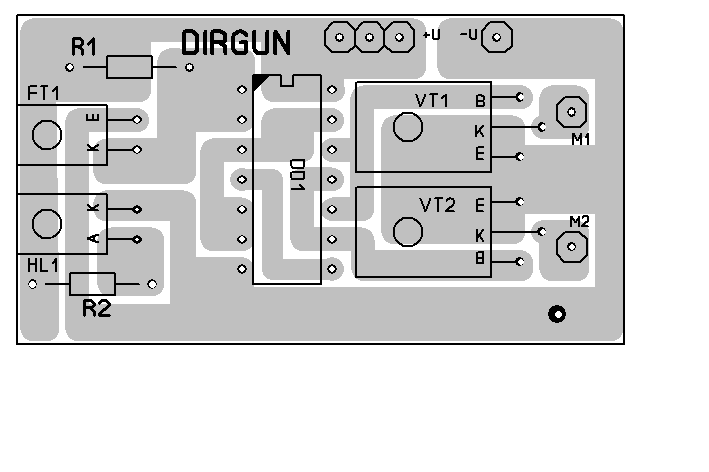
После высыхания плата готова к установке на неё радиокомпонентов согласно монтажной схеме на фото 6.
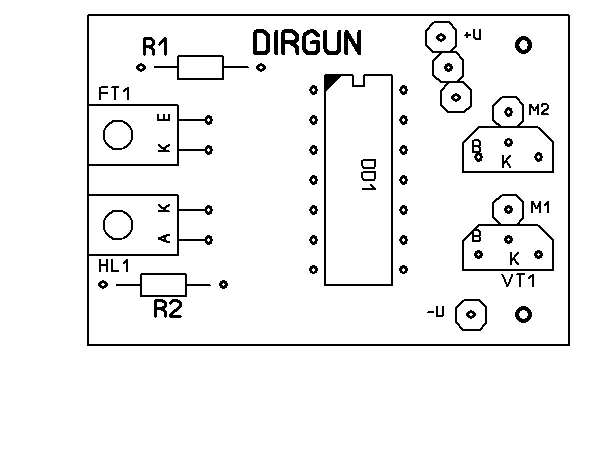
Фото 6.
Шаг.2.Монтаж радиокомпонентов.
Монтаж радиокомпонентов начинайте с установки фототранзистора FT1 и инфракрасного светодиода HL1. Оба компонента припаивают со стороны дорожек (снизу). Для правильного монтажа используйте топологию выводов, фототранзистора и ИК диода, транзисторовVT1 и VT2, микросхему DD1, показанные на фото 7.
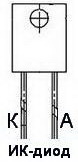
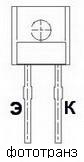
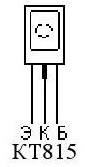
ИК диод Фототранзистор КТ815 К561ЛЕ5
Фото 7.
Шаг.3.Изготовление рамы робота.
В качестве элементов корпуса используется тонкая жесть от консервной банки, кусочек (2см) медной обмоточной проволоки диаметром от 0,8…2мм, бусинка диаметром 5мм.
Вырежьте в приложении (Приложение 1) шаблон рамы. Закрепите шаблон на тонкой жести, обведите маркером по контуру. Вырезать раму следует ножницами по металлу, соблюдая правила безопасности при работе с жестью. В результате должна получиться форма как на фото 8.
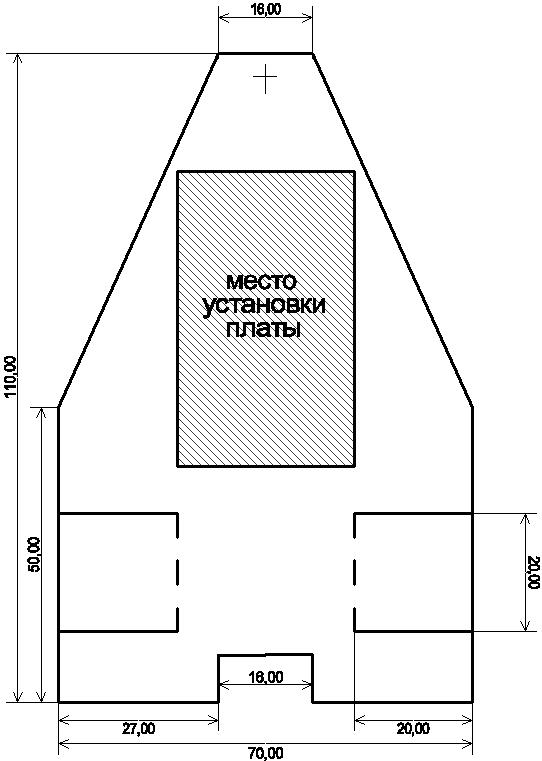
Фото 8.
На позициях для моторов M1,M2 прикрепите прямоугольные полоски двустороннего скотча. Так как двусторонний скотч имеет две клейкие стороны, то делать это нужно аккуратно. Назначение скотча устранение проскальзывания моторов после крепежа. Установите один мотор на позицию и надавите, после этого мотор прикрепиться к клейкой стороне двустороннего скотча. После этого приматывайте мотор к позиции изоляционной лентой. Аналогично закрепите второй мотор на позиции. На валы обоих моторов наденьте резиновые колпачки от гелиевого стержня, они послужат протекторами для сцепления с поверхностью.
На позицию выключателя нужно припаять выключатель питания. В передней части рамы есть отверстие, в которое нужно впаять отрезок проволоки подходящего диаметра. На конец проволоки приклеить бусинку, для гладкого перемещения по трассе. Фото 9
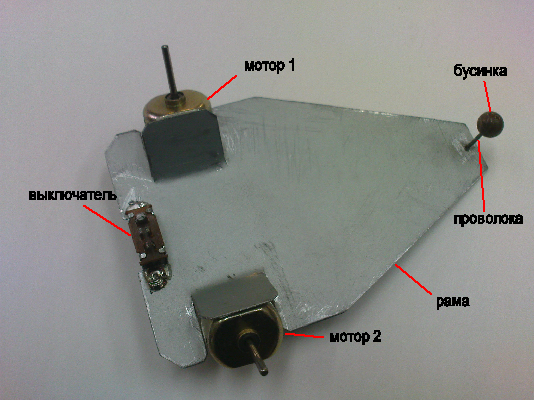
Фото 9.
Настройка робота.
Настройка робота несложна и заключается в регулировке расстояния между моторами и регулировке расстояния между поверхностью и фототранзистором. Прежде чем проводить настройку проведите проверку по приведённым ниже рекомендациям.
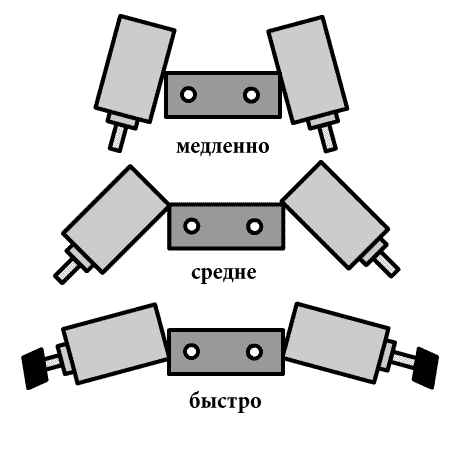
фото.10.
Проверка светодиода HL1. Убедитесь, что светодиод HL1 действительно излучает инфракрасный свет. Чтобы зарегистрировать (увидеть) инфракрасное излучение потребуется сотовый телефон со встроенным фотоаппаратом. Переключите сотовый телефон в режим фотографирования и наведите на светодиод. На жк-экране телефона вы увидите, что светодиод светиться беловато-синеватым светом, что означает исправность светодиода и схемы подключения. Если светодиод будет тёмным, то необходимо проверить его подключение по приведённым фотографиям и электрической схеме рис.1.
Проверка фототранзистора. Проверьте реакцию фототранзистора на чёрный цвет (линию трассы). Удерживая робота рукой попеременно поместите его на чёрной трассой и над белым полем. Во время перемещений должны переключаться поочерёдно двигатели. Если этого не происходит, проверьте цепи подключения моторов, ориентируясь по фотографиям и электрической схеме рис.1. Сопротивление резистора R1 определяет чувствительность схемы к отражённом излучению. Чем больше сопротивление, тем выше чувствительность к свету и наоборот.
Настройка движения по трассе. Все испытания необходимо проводить только со "свежими" батарейками! Установите робота на край трассы и включите.
Если робот не реагирует на трассу (чёрный цвет), то вам необходимо путём сгиба/отгиба передней части (по толстой линии сгиба) приблизить или отдалить пару фототранзистор-светодиод от поверхности трассы.
Если робот неуверенно передвигается по трассе, часто сходит, то подгибайте навстречу друг другу (внутрь) силовую раму с закрепленными на ней моторами. Чем более вертикально ориентированы моторы, тем робот будет более увереннее держаться на трассе. Но, чрезмерно сгибать силовую раму и приближать моторы друг к другу тоже не рекомендуется.
Заключение.
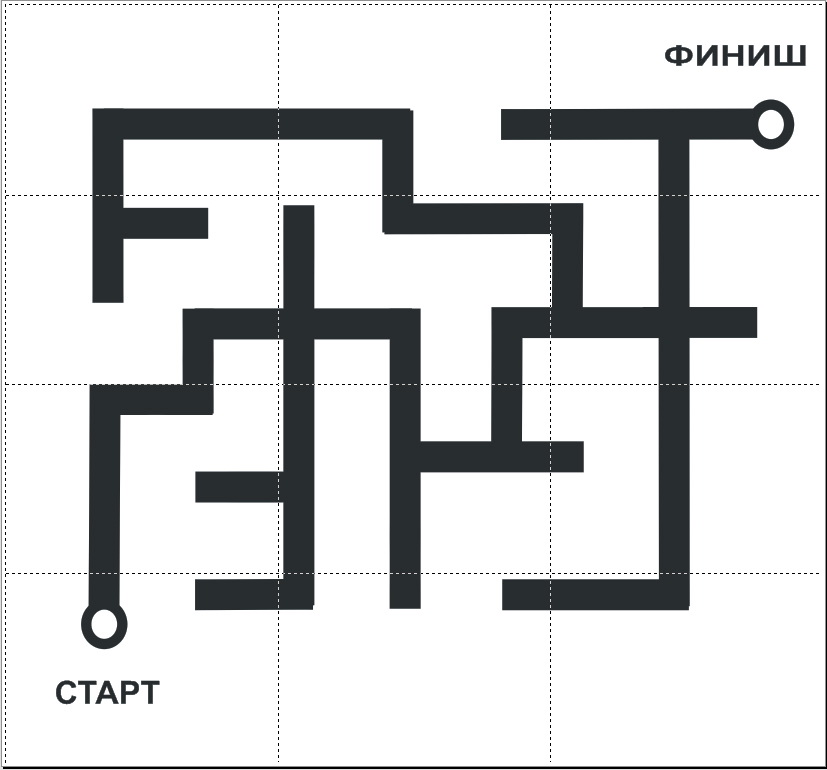
Конструкция робота разрабатывалась так чтобы можно было поучаствовать в соревнованиях «Траектория», устройство должно было перемещаться вдоль нарисованной линии от точки старта до финиша за наименьшее время
Поставленные задачи по разработке архитектуры дихотомического робота, по разработке конструкции и системы управления роботом выполнены полностью.
Конструкторские и изобретательские навыки при испытаниях позволили проанализировать работу модели в критических ситуациях, усовершенствовать, и добавить свои конструкторские мысли в модель. Элементы соревновательного момента подтвердили наличие полученных знаний о правилах соревнований и современных методах управления в спортивной робототехнике.
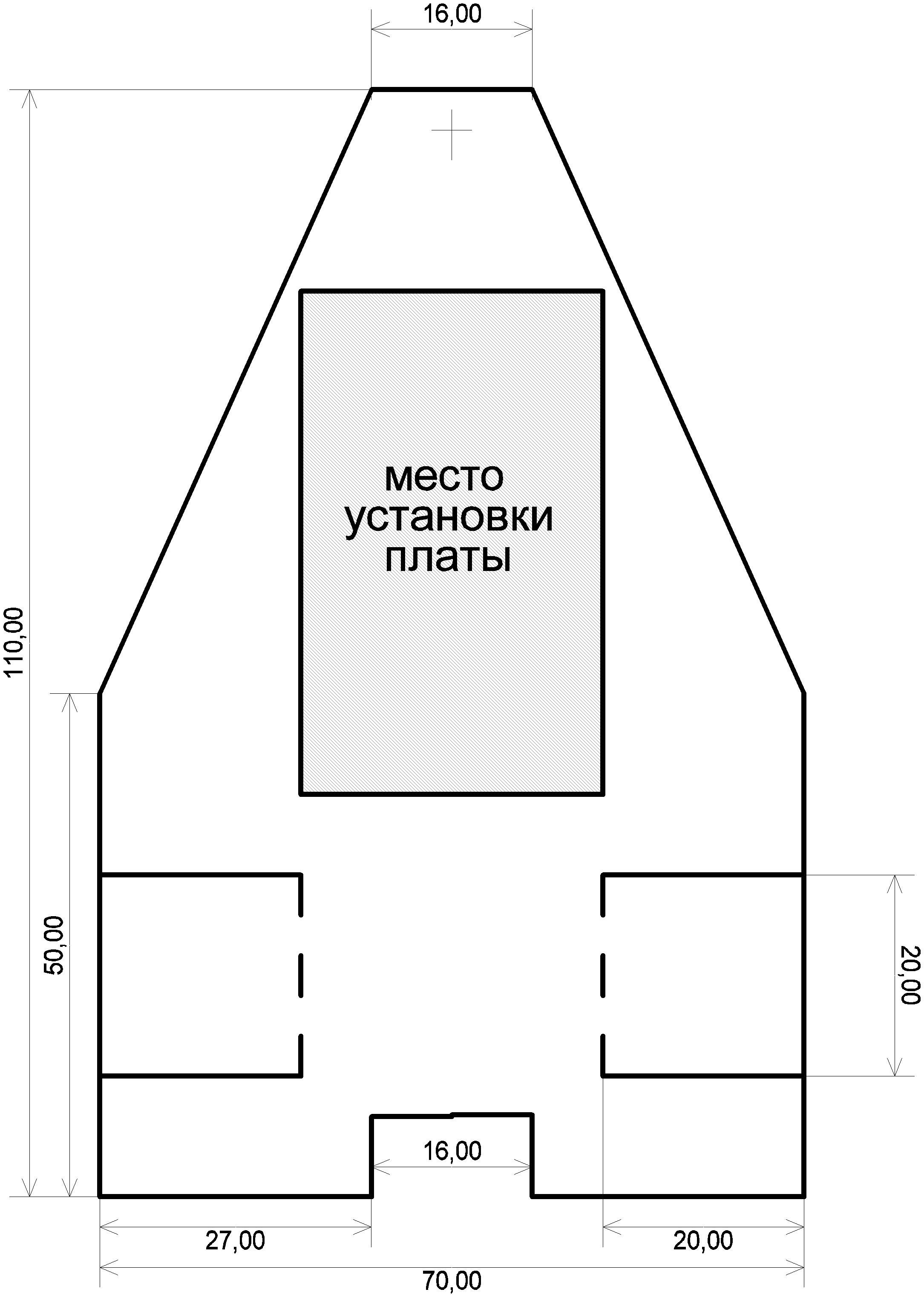
Приложение
Приложение 1 - Чертеж рамы.
Приложение 2. Печатная плата
Приложение 3. Трасса.
15






Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

