Россия, Томск


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 17.04.2019 05:55

Шеховцева Галина Павловна
преподаватель спецдисциплин
80 лет
Местоположение
Специализация
Электромагнитный момент и механические характеристики асинхронного двигателя
Категория:
Технология
13.03.2019 10:44

Просмотр содержимого документа
«Электромагнитный момент и механические характеристики асинхронного двигателя»
Областное государственное бюджетное профессиональное образовательное учреждение «Томский политехнический техникум» (ОГБПОУ «ТПТ») Электромагнитный момент и механические характеристики асинхронного двигателя
Томск 2019
Асинхронные электродвигатели
- Асинхронные машины получили наиболее широкое применение в современных электрических установках и являются самым распространенным видом бесколлекторных электрических машин переменного тока. Как и любая электрическая машина, асинхронная машина обратима и может работать как в генераторном, так и двигательном режимах. Однако преобладающее применение имеют асинхронные двигатели, составляющие основу современного электропривода.
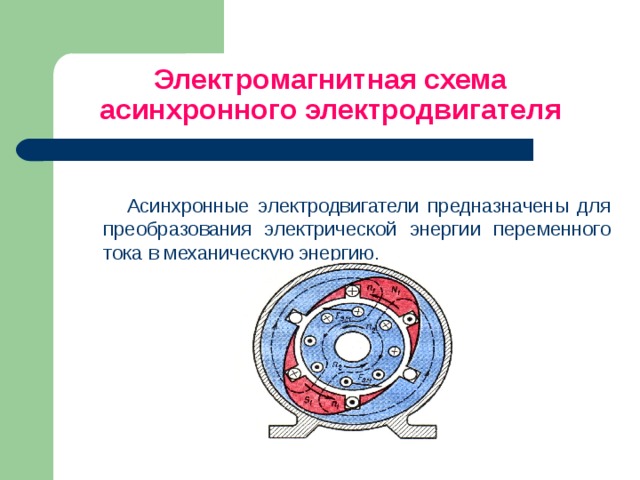
Электромагнитная схема асинхронного электродвигателя
Асинхронные электродвигатели предназначены для преобразования электрической энергии переменного тока в механическую энергию.
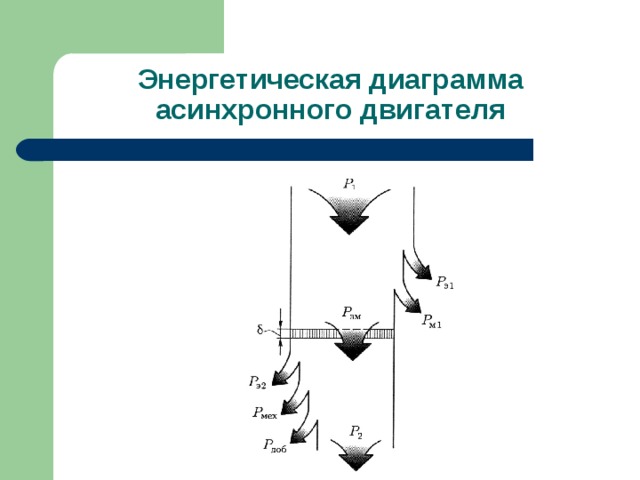
Энергетическая диаграмма асинхронного двигателя
Понятие электромагнитной мощности АД
Из энергетической диаграммы следует, что электромагнитная мощность асинхронного двигателя:
Р эм =Р 1 -(Р м1 +Р э1 )
Электрические потери в роторе прямо пропорциональны скольжению:
Р э2 = s Р эм
Электрические потери в обмотке ротора:
Р э2 = m 2 I 2 2 r 2 = m 1 I ‘2 2 r ′ 2 .
Принцип образования электромагнитного момента асинхронного двигателя
Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем статора.
Электромагнитный момент М пропорционален электромагнитной мощности, Н ∙м :
М = Р эм / ω 1 (7)
где ω 1 = 2 π n 1 /60 = 2 π f 1 / р - угловая синхронная скорость вращения, рад/с
Подставив в значение электромагнитной мощности из формулы Р Э2 = s Р ЭМ , получим:
М = Р Э2 / (ω 1 s) = m 1 I ′ 2 2 r′ 2 /(ω 1 s) (8 )
т. е. электромагнитный момент асинхронного двигателя пропорционален мощности электрических потерь в обмотке ротора.
Значение тока ротора : I ′ 2 = U 1 /
Значение электромагнитного момента асинхронного двигателя
Если значение тока ротора по подставить в (8), то получим формулу электромагнитного момента асинхронной машины, (Н ∙ м):
М = (9)
Параметры схемы замещения асинхронной машины r 1 , r' 2 , х 1 и х' 2 являются постоянными, так как их значения при изменениях нагрузки машины остается практически неизменными. Также постоянными можно считать напряжение на обмотке фазы статора U 1 и частоту f 1 . В выражении момента M единственная переменная величина — скольжение s, которое для различных режимов работы асинхронной машины может принимать разные значения в диапазоне от + ∞ до - ∞ .
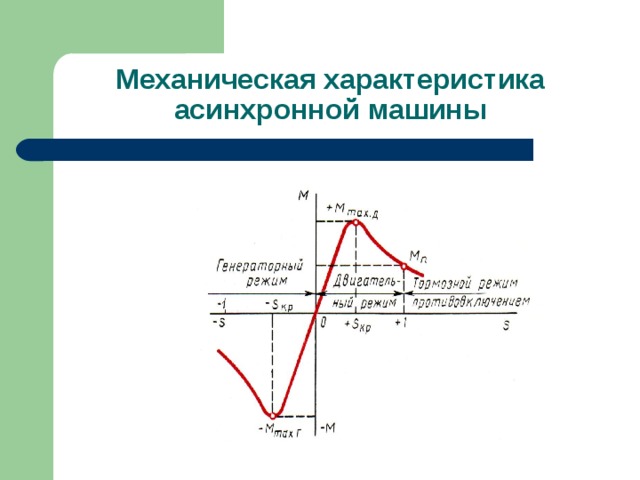
Механическая характеристика асинхронной машины
Зависимость момента от скольжения M = f ( s ) при U 1 = const , f 1 = const и постоянных параметрах схемы замещения называется механической характеристикой асинхронной машины.
Анализ выражения (9), представляющего собой аналитическое выражение механической характеристики M = f ( s ), показывает, что при значениях скольжения s = 0 и s = ∞ электромагнитный момент М = 0. Из этого следует, что механическая характеристика M = f ( s ) имеет максимум.
Механическая характеристика асинхронной машины
Анализ механической характеристики асинхронной машины
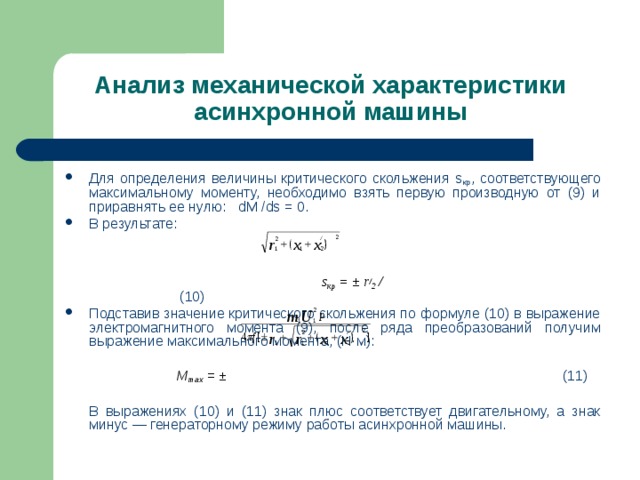
- Для определения величины критического скольжения s кр , соответствующего максимальному моменту, необходимо взять первую производную от (9) и приравнять ее нулю: dM / ds = 0.
- В результате:
s кр = ± r / 2 / (10)
- Подставив значение критического скольжения по формуле (10) в выражение электромагнитного момента (9), после ряда преобразований получим выражение максимального момента, (Н ∙ м):
M max = ± (11)
В выражениях (10) и (11) знак плюс соответствует двигательному, а знак минус — генераторному режиму работы асинхронной машины.
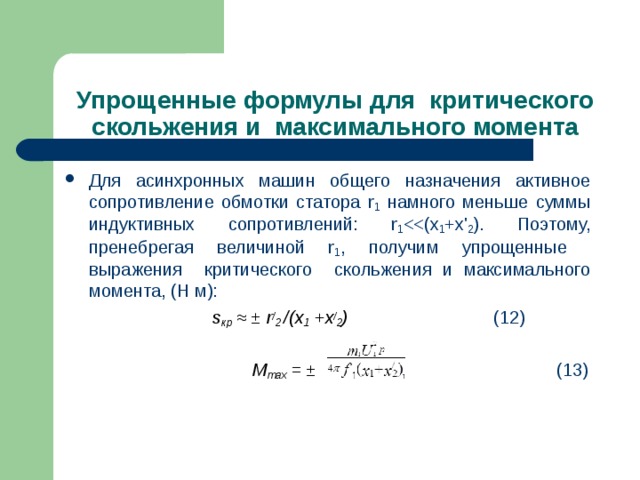
Упрощенные формулы для критического скольжения и максимального момента
- Для асинхронных машин общего назначения активное сопротивление обмотки статора r 1 намного меньше суммы индуктивных сопротивлений: r 1
s кр ≈ ± r / 2 /(x 1 +x / 2 ) (1 2 )
M max = ± (13)
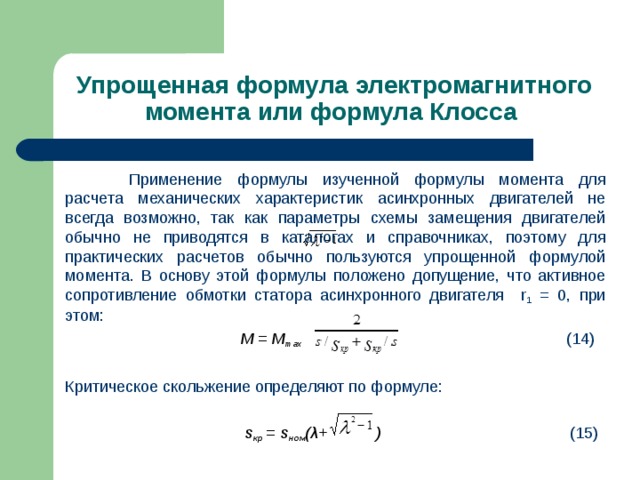
Упрощенная формула электромагнитного момента или формула Клосса
Применение формулы изученной формулы момента для расчета механических характеристик асинхронных двигателей не всегда возможно, так как параметры схемы замещения двигателей обычно не приводятся в каталогах и справочниках, поэтому для практических расчетов обычно пользуются упрощенной формулой момента. В основу этой формулы положено допущение, что активное сопротивление обмотки статора асинхронного двигателя r 1 = 0, при этом:
M = M max (14)
Критическое скольжение определяют по формуле:
s кр = s ном ( λ + ) (15)
Формула Клосса
- Расчет механической характеристики намного упрощается, если его вести в относительных единицах M = M / M max . В этом случае уравнение механической характеристики имеет вид:
M = (16)
- Применение упрощенной формулы для расчета электромагнитного расчета наиболее целесообразно при расчете рабочего участка механической характеристики и при скольжениях s s кр ошибка может достигать 15—17%.
Анализ механической характеристики асинхронной машины
Из формулы (9) следует, что электромагнитный момент асинхронного двигателя пропорционален квадрату напряжения сети:
M ≡ U 1 2 .
Это в значительной степени отражается на эксплуатационных свойствах двигателя: даже небольшое снижение напряжения сети вызывает заметное уменьшение вращающего момента асинхронного двигателя .
Например, при уменьшении напряжения на 10% относительно номинального ( U 1 = 0,9 U ном) электромагнитный момент двигателя уменьшается на 19% : M / =0,9 2 M ,
где М— момент при номинальном напряжении сети, М / — момент при пониженном напряжении.
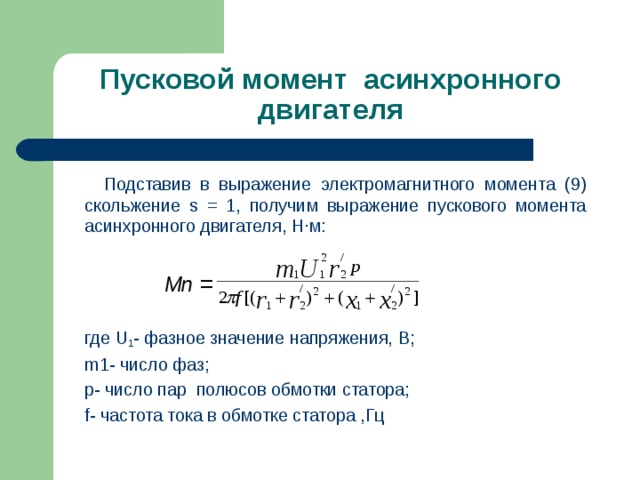
Пусковой момент асинхронного двигателя
Подставив в выражение электромагнитного момента (9) скольжение s = 1, получим выражение пускового момента асинхронного двигателя, Н ∙м:
Мп =
где U 1 - фазное значение напряжения, В;
m 1- число фаз;
р- число пар полюсов обмотки статора;
f- частота тока в обмотке статора ,Гц
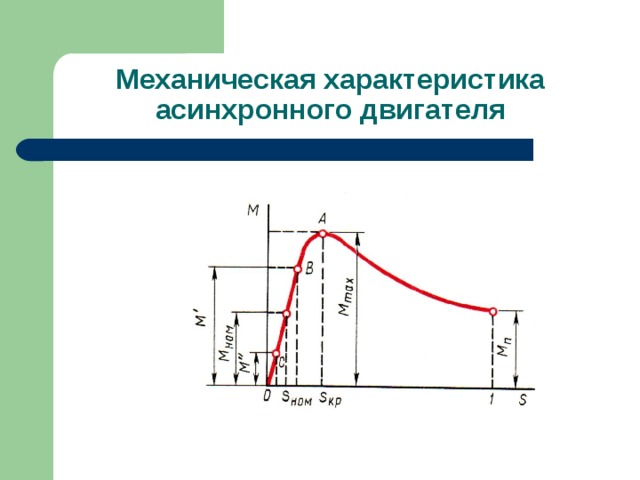
Механическая характеристика асинхронного двигателя

Анализ механической характеристики асинхронного двигателя
- Под действием пускового момента начинается вращение ротора двигателя, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой М = f ( s ).
- При критическом скольжении s кр момент достигает максимального значения М m ах .
- С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент М начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х.х. M 0 и полезного нагрузочного момента (момента на валу двигателя) М 2 , :
М = М 0 + M 2 = M ст (12)
Статический момент М ст равен сумме противодействующих моментов при равномерном вращении ротора ( n 2 = const ). Если противодействующий момент на валу двигателя М 2 соответствует номинальной нагрузке двигателя, то установившийся режим работы двигателя определится точкой на механической характеристике с координатами М = М ном и s = s ном , где М ном и s ном — номинальные значения электромагнитного момента и скольжения.
Условие устойчивой работы асинхронного двигателя
- Из анализа механической характеристики также следует, что устойчивая работа асинхронного двигателя возможна при скольжениях меньше критического ( s
- Работа асинхронного двигателя становится неустойчивой при скольжениях s ≥ s кр. Так, если электромагнитный момент двигателя М = М m ах, а скольжение s = s к p , то даже незначительное увеличение нагрузочного момента М 2 , вызвав увеличение скольжения s , приведет к уменьшению электромагнитного момента М. За этим следует дальнейшее увеличение скольжения и т. д., пока скольжение не достигнет значения s = 1, т. е. пока ротор двигателя не остановится.
- Таким образом, при достижении электромагнитным моментом максимального значения наступает предел устойчивой работы асинхронного двигателя. Следовательно, для устойчивой работы двигателя необходимо, чтобы сумма нагрузочных моментов действующих на ротор, была меньше максимального момента:
Мст = (М 0 + М 2 )
- Для надежной работы асинхронного двигателя и чтобы случайные кратковременные нагрузки не вызывали остановок двигателя, необходимо, чтобы он обладал перегрузочной способностью.
Перегрузочная способность АД
Перегрузочная способность двигателя λ определяется отношением максимального момента М max к номинальному Мном. Для асинхронных двигателей общего назначения перегрузочная способность составляет
λ = Mmax / M ном = 1,7 ÷ 2,5.
- Следует также обратить внимание на то, что работа двигателя при скольжении s
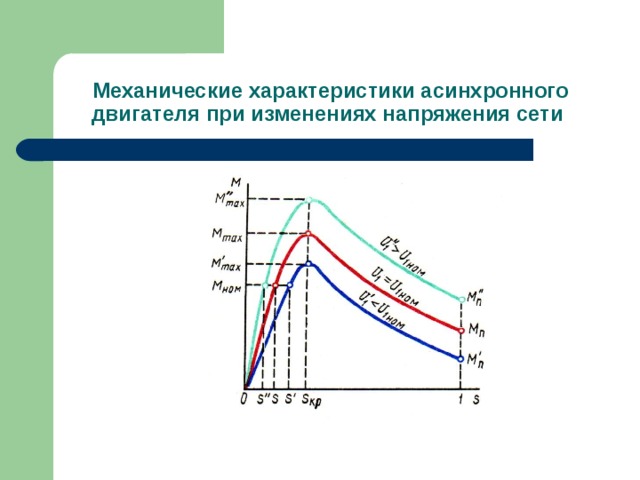
Механические характеристики асинхронного двигателя при изменениях напряжения сети
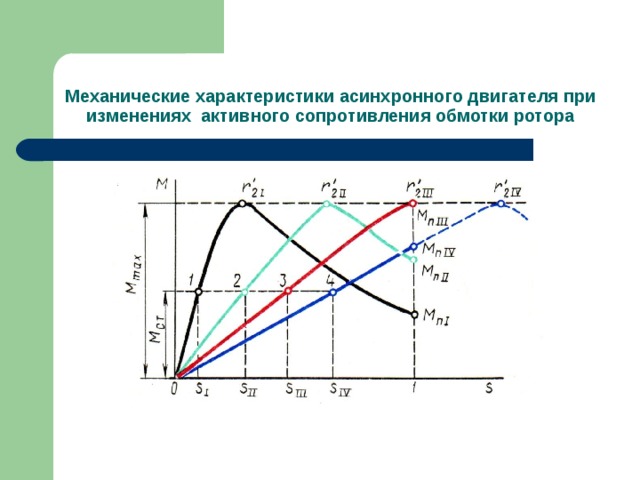
Механические характеристики асинхронного двигателя при изменениях активного сопротивления обмотки ротора
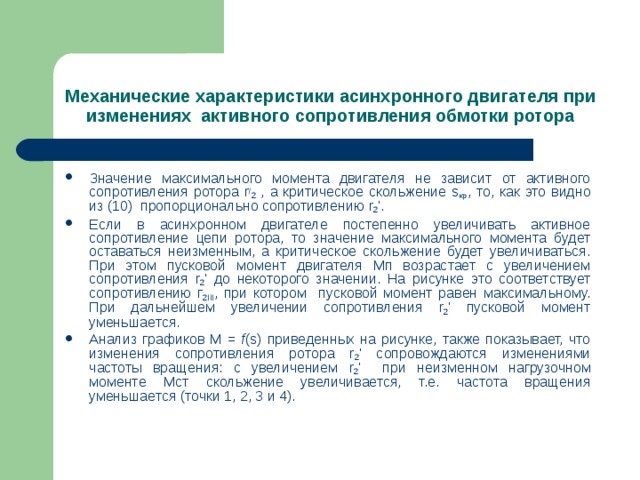
Механические характеристики асинхронного двигателя при изменениях активного сопротивления обмотки ротора
- Значение максимального момента двигателя не зависит от активного сопротивления ротора r / 2 , а критическое скольжение s кр , то, как это видно из (10) пропорционально сопротивлению r 2 '.
- Если в асинхронном двигателе постепенно увеличивать активное сопротивление цепи ротора, то значение максимального момента будет оставаться неизменным, а критическое скольжение будет увеличиваться. При этом пусковой момент двигателя Мп возрастает с увеличением сопротивления r 2 ' до некоторого значении. На рисунке это соответствует сопротивлению г 2 III , при котором пусковой момент равен максимальному. При дальнейшем увеличении сопротивления r 2 ' пусковой момент уменьшается.
- Анализ графиков М = f ( s ) приведенных на рисунке, также показывает, что изменения сопротивления ротора r 2 ' сопровождаются изменениями частоты вращения: с увеличением r 2 ' при неизменном нагрузочном моменте Мст скольжение увеличивается, т.е. частота вращения уменьшается (точки 1, 2, 3 и 4).
Электромагнитные моменты от высших пространственных гармоник магнитного поля асинхронного двигателя
- МДС трехфазной обмотки статора помимо основной гармоники содержит ряд высших пространственных гармоник. Каждая из этих гармоник создает в машине вращающееся магнитное поле, частота вращения которого в ν раз меньше частоты вращения поля основной гармоники. При этом высшие пространственные гармоники МДС порядка ν = 6х + 1 создают прямовращающиеся (прямые) поля, а гармоники порядка ν = 6х - I — обратновращающиеся (обратные) поля.
Асинхронные паразитные моменты
- Магнитные поля от высших пространственных гармоник, сцепляясь с обмоткой ротора, наводят в ней ЭДС и создают в двигателе собственные электромагнитные асинхронные моменты.
- Эти моменты ухудшают свойства двигателя, поэтому их принято называть паразитными. При рассмотрении выражения электромагнитного момента и механической характеристики асинхронного двигателя имелось в виду действие лишь магнитного поля основной гармоники. Если же учесть влияние высших пространственных гармоник поля, то кривая электромагнитного момента (см. рис.) окажется искаженной.
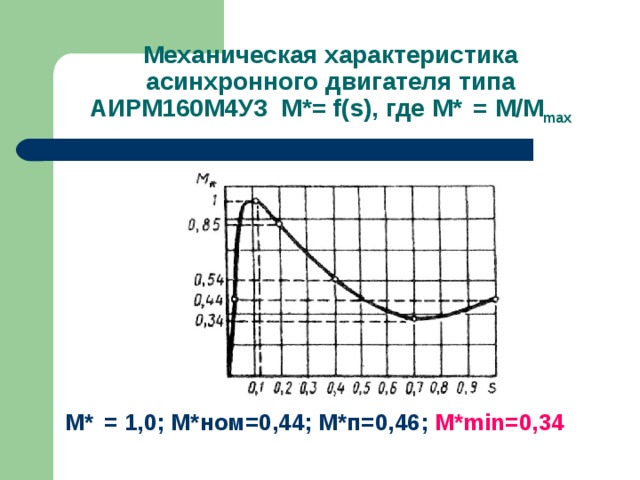
Механическая характеристика асинхронного двигателя типа АИРМ160М4У3 М*= f ( s ), где M * = M / M max
M * = 1,0; M *ном=0,44; М*п=0,46; М* min = 0 , 34
Асинхронные паразитные моменты и способы ослабления их влияниия
- Заметное влияние на форму кривой электромагнитного момента оказывают асинхронные паразитные моменты от гармоник поля зубцового порядка (обусловленных наличием зубцов на статоре и роторе):
vZ1 = (Z1/p) ± 1 ; vZ2 = (Z2/p) ± 1 .
- Эффективное средство ослабления влияния высших гармоник на свойства двигателей — скос пазов ротора в пределах зубцового деления. В этом случае ЭДС в стержнях ротора от зубцовых гармоник поля статора снижаются почти до нуля.
- Действие высших гармоник поля ослабляют также правильным выбором числа пазов статора Z 1 и ротора Z 2 . Рекомендуется соотношение Z 2 ≤ l ,25 ( Z 1 ± p ) .
Синхронные моменты
- Между вращающимися магнитными полями высших пространственных гармоник статора и ротора, имеющими одинаковый порядок, возникают силы магнитного взаимодействия. Результатом этого взаимодействия является возникновение синхронного момента М c ν . В общем случае поля статора и ротора от высших пространственных гармоник вращаются с разными частотами ( n ν 1 ≠ n ν 2 ), а поэтому направление синхронного момента Mc ν меняется в зависимости от взаимного расположения магнитных полюсов взаимодействующих полей. Обычно частота изменения знака момента Mc ν велика, и из-за большой инерции ротора этот момент не оказывает заметного влияния на вращение ротора. Но при некоторой частоте вращения ротора поля высших гармоник статора и ротора начинают вращаться с одинаковой частотой вращения ( n ν 1 = n ν 2 ). В этом случае направление синхронного момента Mc ν становится стабильным. В зависимости от взаимного расположения магнитных полюсов магнитных полей момент Mc ν может быть положительным или отрицательным.
Синхронные моменты и способы их уменьшения
- Синхронные моменты в асинхронном двигателе нежелательны, т. е. являются паразитными, так как они могут вызвать провалы в механической характеристике двигателя. Наибольшего значения синхронные моменты достигают при наличии зубцовых гармоник поля статора и ротора одинакового порядка, т. е. при ν z 1 = ν z 2 . Синхронные моменты наиболее опасны при следующих соотношениях пазов статора и ротора ( Z 1 и Z 2 ):
Z 1 = Z 2 ; Z 1 - Z 2 = ±2p.
Особенно нежелательно равенство числа пазов на статоре и роторе ( Z 1 = Z 2 ), так как это может привести к «прилипанию» ротора к статору: зубцы ротора силами магнитного тяжения удерживаются под зубцами статора. Уменьшению синхронных моментов способствует скос пазов на роторе.
Спасибо за внимание !








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

