
Россия, Муравленко


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 11.05.2026 22:05

Дьяченко Вера Михайловна
преподаватель
54 года
Местоположение
Специализация
Элементы цифровых систем автоматики
Категория:
Прочее
27.09.2023 20:59

Просмотр содержимого документа
«Элементы цифровых систем автоматики»
ЭЛЕМЕНТЫ ЦИФРОВЫХ СИСТЕМ АВТОМАТИКИ

Аналоговые и дискретные сигналы
- Сигнал — это изменение свойств носителя, которое используется для передачи информации. Изменение выбранного свойства (например, силы тока, напряжения, освещённости) во времени можно описать виде функции.
- Элементы электронных устройств, обмениваются данными с помощью электрических сигналов; для получения информации приёмник должен измерить этот сигнал (чаще всего — напряжение на контактах или силу тока).
- В таких устройствах, как радиоприёмник и микрофон, изменение электрического сигнала может произойти в любой момент и быть любым (в пределах допустимого диапазона). Такие сигналы называют аналоговыми.
Аналоговые и дискретные сигналы
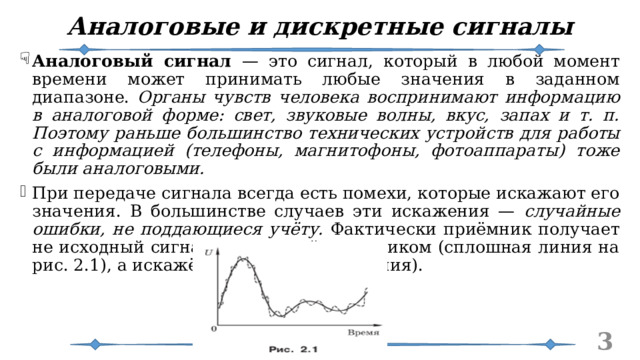
- Аналоговый сигнал — это сигнал, который в любой момент времени может принимать любые значения в заданном диапазоне. Органы чувств человека воспринимают информацию в аналоговой форме: свет, звуковые волны, вкус, запах и т. п. Поэтому раньше большинство технических устройств для работы с информацией (телефоны, магнитофоны, фотоаппараты) тоже были аналоговыми.
- При передаче сигнала всегда есть помехи, которые искажают его значения. В большинстве случаев эти искажения — случайные ошибки, не поддающиеся учёту. Фактически приёмник получает не исходный сигнал, посланный источником (сплошная линия на рис. 2.1), а искажённый (штриховая линия).
Аналоговые и дискретные сигналы
- Вспомним, что аналоговый сигнал может принимать любые значения в некотором диапазоне. «Очистить» его от помех в общем случае нельзя, потому что невозможно понять, искажён он или на самом деле имеет такое значение. Кроме того, дополнительные ошибки (погрешности) вносятся при измерении сигнала.
- Если использовать аналоговые компьютеры, мы будем при каждом расчёте с одинаковыми исходными данными получать несколько отличающиеся результаты. Кроме того, при копировании аналоговая информация искажается (например, при каждом копировании звукозаписи на магнитной ленте качество копии ухудшается).
Аналоговые и дискретные сигналы
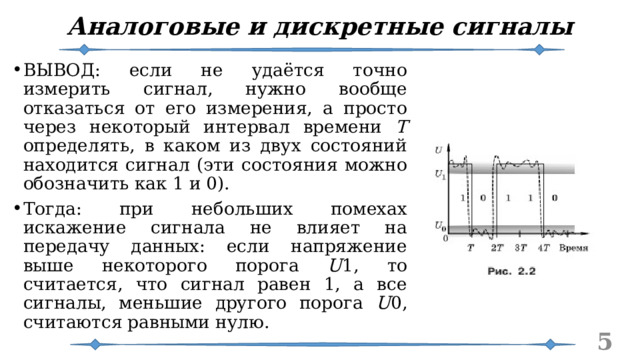
- ВЫВОД: если не удаётся точно измерить сигнал, нужно вообще отказаться от его измерения, а просто через некоторый интервал времени T определять, в каком из двух состояний находится сигнал (эти состояния можно обозначить как 1 и 0).
- Тогда: при небольших помехах искажение сигнала не влияет на передачу данных: если напряжение выше некоторого порога U 1, то считается, что сигнал равен 1, а все сигналы, меньшие другого порога U 0, считаются равными нулю.
Аналоговые и дискретные сигналы
Сигналы, с которыми работает компьютер, называются дискретными или цифровыми . Они обладают двумя важными свойствами:
- изменяются только в отдельные моменты времени ( дискретность по времени );
- • принимают только несколько возможных значений ( дискретность по уровню ).
Дискретный (цифровой) сигнал — это последовательность значений, принадлежащих некоторому конечному множеству.
- Мы естественным образом пришли к необходимости использования дискретных сигналов, когда потребовалось точно и однозначно воспринимать передаваемую информацию с учётом неизбежных помех. Так как каждому значению дискретного сигнала всегда можно поставить в соответствие определённый знак, такой сигнал можно рассматривать как сообщение, записанное с помощью конечного набора знаков (алфавита)
- Этот принцип применим не только к компьютерам. Переход от наскальных рисунков к алфавитному письму, где каждый знак имеет чётко определённое значение, — это переход от аналоговых сигналов к дискретным, цель которого — максимально исключить неоднозначное понимание смысла. Код Морзе и двоичный код — это тоже дискретные коды.
Аналоговые и дискретные сигналы
Дискретизация
Поскольку данные в компьютерах передаются с помощью дискретных сигналов, они могут хранить и обрабатывать только дискретную информацию, т. е. такую, которая может быть записана с помощью конечного количества знаков некоторого алфавита. Поэтому для ввода любых данных в компьютер их нужно перевести в дискретный код.
Например, линия, нарисованная на бумаге, при сканировании представляется в памяти компьютера в виде отдельных элементов — пикселей. Такая процедура называется дискретизацией.
Дискретизация означает, что мы представляем целое (непрерывное) в виде набора отдельных элементов. Например, картина художника — это аналоговая (непрерывная) информация, а мозаика, сделанная на её основе (рисунок из кусочков разноцветного стекла), — дискретная.
Аналоговые и дискретные сигналы
Дискретизация — это представление непрерывного объекта в виде множества отдельных элементов. Дискретизацию мы используем и в жизни. Например, когда измеряют температуру воздуха, обычно округляют её до целых градусов, хотя температура изменяется непрерывно, а не скачками: она может быть равной и 18,25g С, и 18,251 С, и 18,2513 С и т. д.
Множество вещественных чисел непрерывно (между любыми двумя различными числами есть ещё бесконечно много других), а множество целых чисел — дискретно. Таким образом, при округлении мы выполняем дискретизацию данных.
Все приборы, которые показывают результаты измерений в цифровом виде, выполняют дискретизацию. Например, стрелка в обычном спидометре автомобиля может принимать любое положение, это непрерывный (аналоговый) прибор. А цифровой спидометр показывает дискретные данные — скорость с округлением до 1 км/ч.
Аналоговые и дискретные сигналы
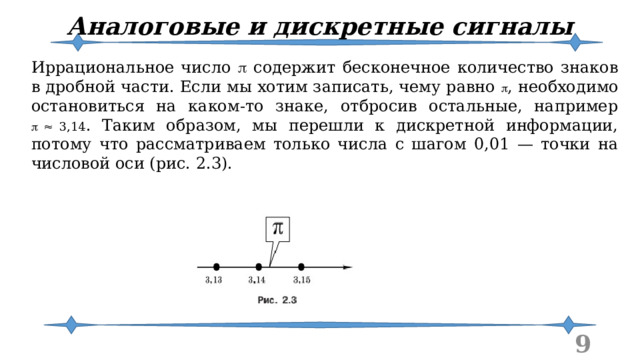
Иррациональное число содержит бесконечное количество знаков в дробной части. Если мы хотим записать, чему равно , необходимо остановиться на каком-то знаке, отбросив остальные, например 3,14 . Таким образом, мы перешли к дискретной информации, потому что рассматриваем только числа с шагом 0,01 — точки на числовой оси (рис. 2.3).
Аналоговые и дискретные сигналы
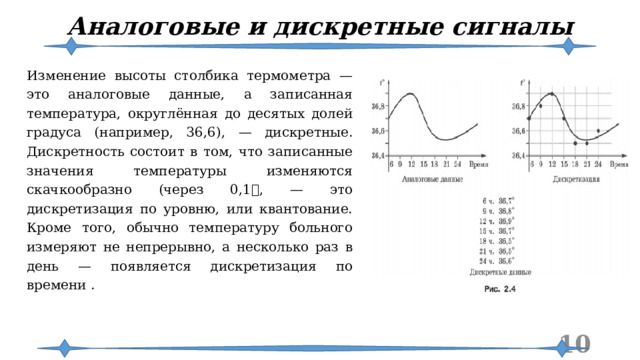
Изменение высоты столбика термометра — это аналоговые данные, а записанная температура, округлённая до десятых долей градуса (например, 36,6), — дискретные. Дискретность состоит в том, что записанные значения температуры изменяются скачкообразно (через 0,1, — это дискретизация по уровню, или квантование. Кроме того, обычно температуру больного измеряют не непрерывно, а несколько раз в день — появляется дискретизация по времени .

Аналоговые и дискретные сигналы
Заметим, что при дискретизации, как правило, происходит потеря информации.
В данном случае мы, во-первых, потеряли информацию об изменении температуры между моментами измерений и, во-вторых, исказили измеренные значения, округлив их до десятых (каждая дискретизация, и по времени, и по уровню, вносит свою ошибку).
Чтобы уменьшить ошибки, нужно уменьшать шаг дискретизации — измерять температуру чаще, записывать показания термометра до тысячных долей градуса и т. д. Однако в любой практической задаче есть некоторый предел, после которого увеличение точности уже никак не влияет на конечный результат.

Аналоговые и дискретные сигналы
Ещё один пример — аналоговые («стрелочные») и цифровые вольтметры, которые измеряют одну и ту же величину, но выводят результат измерения в разном виде.

Аналоговые и дискретные сигналы
С одной стороны, переход к дискретному представлению информации делает более надёжной передачу данных (если обе стороны одинаково понимают используемые знаки). С другой стороны, при дискретизации часть информации теряется. Хотя аналоговую информацию невозможно точно представить в дискретном виде, при увеличении точности дискретизации свойства непрерывной и дискретной информации практически совпадают. Например, для точной записи числа требуется бесконечное количество цифр, но в расчётах чаще всего достаточно знать это значение c точностью не более 10 знаков.
Идеальная непрерывность существует только в теории . Мы считаем дерево, пластмассу, металл непрерывными, но на самом деле они состоят из отдельных молекул, расположенных на некотором расстоянии друг от друга, — это значит, что вещество дискретно.

Аналоговые и дискретные сигналы
Иллюстрация в книге кажется нам сплошной, но при сильном увеличении видно, что она строится из отдельных точек (имеет «растр»). Классическая («плёночная») фотография считается аналоговой, но при увеличении снимка с фотоплёнки нельзя бесконечно получать всё новые и новые детали — предел «уточнения» определяется величиной зерна светочувствительного материала.
Мы часто воспринимаем дискретные объекты как непрерывные, потому что наши органы чувств не позволяют различить отдельные элементы. Например, разрешающая способность глаза составляет около одной угловой минуты (1′ = 1/60 часть градуса), это значение определяется размером элементов сетчатки глаза. Поэтому человек не может различить два объекта, если направления на них отличаются меньше, чем на 1′. Для того чтобы повысить разрешающую способность при наблюдении, применяют специальные приборы (например, бинокли и микроскопы).

Аналоговые и дискретные сигналы
Выводы
• Знак — это заменитель какого-то объекта, который вызывает в сознании человека образ этого объекта.
• Знаковая система определяется алфавитом (набором используемых знаков) и правилами выполнения операций с этими знаками.
Формальный язык — это язык, в котором однозначно определяется значение каждого слова, а также правила построения предложений и придания им смысла.
• Аналоговый сигнал — это сигнал, который в любой момент времени может принимать любые значения в заданном диапазоне.
• Дискретный (цифровой) сигнал — это последовательность значений, каждое из которых принадлежит некоторому конечному множеству.
• Дискретизация — это представление непрерывного объекта в виде множества отдельных элементов.
Вопросы и задания
1. В чём различие между пиктограммой и символом?
2. Какие бытовые устройства работают с аналоговыми сигналами?
3. Какие системы связи используют аналоговые сигналы, а какие — дискретные?
5. Почему при использовании аналоговой техники передача информации всегда происходит с искажениями?
6. Почему с помощью дискретного сигнала можно передавать информацию практически без искажений? Искажается ли форма такого сигнала под воздействием помех?
7. Сигнал изменяется в моменты времени, кратные 1 секунде, и может принимать одно из 16 возможных значений. Можно ли назвать такой сигнал дискретным?
8. Что такое дискретизация по времени и дискретизация по уровню?
9. Приведите пример дискретизации сигнала: а) только по уровню; б) только по времени. Нарисуйте графики процессов.
10. Почему при дискретизации, как правило, происходит потеря информации? В каких случаях потери информации не будет?
11. Как можно уменьшить потери информации при дискретизации? Почему не стоит стремиться максимально уменьшить эти потери?
12. Приведите примеры, когда одна и та же информация может быть представлена в аналоговой и дискретной формах.
*13. Выясните, какие музыкальные инструменты позволяют извлекать только дискретные звуки (заранее определённые ноты), а какие — звук любой частоты.
14. Объясните фразу «при увеличении точности дискретизации свойства непрерывной и дискретной информации практически совпадают».

Электронные коммутаторы
Коммутационные элементы выполняют переключение электрических цепей при непосредственном механическом воздействии для ручного управления и под воздействием электромагнитных сил при автоматическом управлении.
Электромагнитные коммутаторы имеют невысокое быстродействие — в лучшем случае порядка нескольких микросекунд.
Значительное повышение быстродействия обеспечивается применением электронных коммутационных элементов, построенных на полупроводниковых приборах . Такие электронные коммутаторы называются транзисторными и диодными ключами .

Электронные коммутаторы
В системах автоматики с управлением от ЭВМ, использующих элементы импульсной и цифровой техники, переключения выполняют именно электронные коммутаторы.
Наибольшее распространение получили электронные устройства, в которых в качестве коммутирующего элемента используются транзисторы.
В отличие от диодных ключей, у которых вход и выход имеют непосредственную связь, транзисторные ключи позволяют отделить входную (управляющую) цепь от выходной (управляемой) цепи, что зачастую бывает необходимо.
.

Электронные коммутаторы
Схема наиболее простого транзисторного ключа так же, как и механический ключ (тумблер или выключатель), транзисторный ключ может находиться в одном из двух состояний: разомкнутом , когда транзистор закрыт («выключено»), и замкнутом , когда транзистор открыт («включено»).
Изменение состояния ключа происходит под влиянием входного управляющего напряжения UBX , при этом закрытому состоянию транзистора соответствует низкий положительный уровень входного сигнала, а открытому состоянию — высокий положительный уровень входного сигнала.
Нагрузка к транзисторному ключу может подключаться двумя способами — параллельно Rk и параллельно транзистору.

Электронные коммутаторы
Простейшая схема транзисторного ключа имеет два основный недостатка:
- большая задержка выключения при работе на емкостную нагрузку и
- сильная зависимость выходного напряжения от величины сопротивления нагрузки.
С целью устранения этих недостатков используют более сложные устройства — составные ключи .
Для повышения быстродействия используете ключ с ускоряющей емкостью (конденсатор подключается параллельно резистору в управляющей цепи), ключ с отрицательной обратной связью и другие схемы ключей.

Электронные коммутаторы

ФУНКЦИИ СОВРЕМЕННЫХ АСУ ТП
Информация о неисправностях выдается персоналу станции в виде сообщений и звуковой сигнализации, а также на специальных мнемосхемах комплекса технических средств АСУ ТП, где выделяются вышедшие из строя элементы. Информация об отказах автоматически заносится в ведомость регистрации отказов.
Уровни АСУ ТП. Современная АСУ ТП представляет собой иерархическую систему, в которой четко определены задачи отдельных уровней. В зависимости от выполняемых задач и места расположения оборудования различают три уровня АСУ ТП . Каждый уровень объединяет технические средства по функциональному признаку и выполняемым задачам.
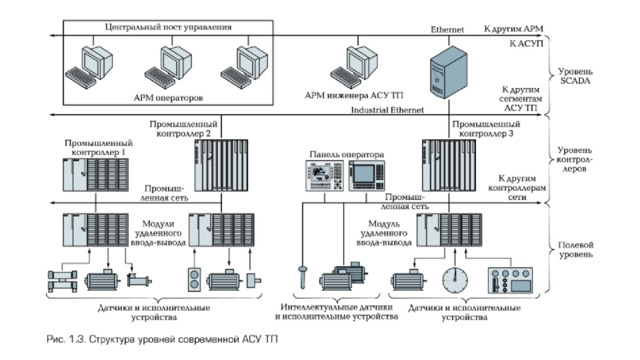

ФУНКЦИИ СОВРЕМЕННЫХ АСУ ТП
Нижний уровень (полевой (Field), уровень ввода/вывода (I/O)) структуры является основой АСУ ТП и включает в себя средства, выполняющие функции получения информации и воздействия на процесс. Эти средства непосредственно взаимодействуют с объектом управления. Они обеспечивают информацией все выше расположенные на схеме устройства и осуществляют передачу управляющих воздействий от любого из них на управляемый объект.
Кроме того, нижний уровень может включать модули распределенного ввода/вывода , которые располагаются непосредственно вблизи объекта управления и осуществляют функции «концентраторов» информации от измерительных преобразователей и управляющих воздействий на исполнительные устройства.
Устройства полевого уровня могут быть интеллектуальными, тогда обмен информацией с этими устройствами возможен непосредственно в цифровой форме по сети передачи данных.

ФУНКЦИИ СОВРЕМЕННЫХ АСУ ТП
Аппаратно-программные технические средства локального уровня управления АСУ ТП должны соответствовать следующим основным требованиям:
- обеспечение работы всех локальных систем автоматического управления в режиме реального времени;
- высокая надежность (на уровне надежности технологического оборудования);
- возможность встраивания технических средств контроля и управления в основное технологическое оборудование;
- возможность нормального функционирования в реальных производственных условиях (загрязненный воздух, существенные перепады температур, сильные электрические поля, вибрационные и ударные нагрузки и т.п.).

ФУНКЦИИ СОВРЕМЕННЫХ АСУ ТП
На локальном уровне управления могут работать несколько контроллеров, представляющих собой распределенную систему управления и решающих общую задачу управления.
Передача данных между отдельными контроллерами осуществляется посредством локальной промышленной сети, которая выполняет следующие действия:
- передача данных между контроллерами, датчиками технологических параметров, измерительными устройствами, исполнительными механизмами и устройствами;
- диагностика технического состояния и работоспособности контрольно-регулирующей аппаратуры, установленной на автоматизированном технологическом производственном агрегате;
- питание датчиков и различных исполнительных устройств, удаленно распределенных по технологическому агрегату;
- передача информации между интеллектуальными датчиками и исполнительными механизмами;
- осуществление связи между контроллерами и устройствами АСУ ТП верхнего уровня.

ФУНКЦИИ СОВРЕМЕННЫХ АСУ ТП
- Для передачи данных в промышленных сетях применяют кабельные линии, волоконно-оптические линии, радиомодемы. Часто промышленную сеть называют сетью полевого уровня, или полевой шиной (field bus). В качестве примера промышленной сети можно привести сеть полевого уровня «Profibus», разработанную компанией Siemens AG (Германия).
- Верхний уровень (уровень человеко-машинного интерфейса} включает в себя одну или несколько станций управления.
- В качестве основного программно-инструментального средства, реализующего человеко-машинный интерфейс, используется система SCADA (Supervisory Control And Data Acquisition — диспетчерское управление и сбор данных), которая позволяет создавать как однопользовательские АРМ, так и сложные распределенные системы с несколькими серверами данных, имеющие собственную многоуровневую структуру, включая уровень представления данных в глобальных сетях и в сети Интернет.
ФУНКЦИИ СОВРЕМЕННЫХ АСУ ТП
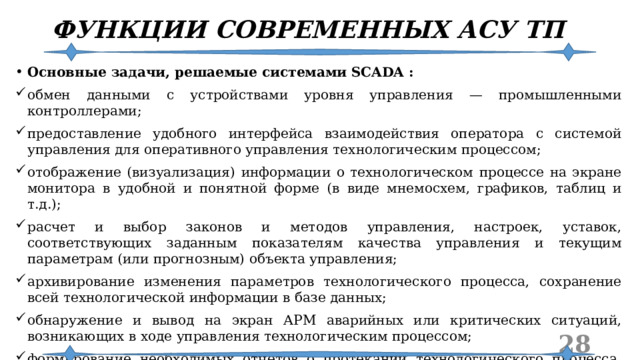
- Основные задачи, решаемые системами SCADA :
- обмен данными с устройствами уровня управления — промышленными контроллерами;
- предоставление удобного интерфейса взаимодействия оператора с системой управления для оперативного управления технологическим процессом;
- отображение (визуализация) информации о технологическом процессе на экране монитора в удобной и понятной форме (в виде мнемосхем, графиков, таблиц и т.д.);
- расчет и выбор законов и методов управления, настроек, уставок, соответствующих заданным показателям качества управления и текущим параметрам (или прогнозным) объекта управления;
- архивирование изменения параметров технологического процесса, сохранение всей технологической информации в базе данных;
- обнаружение и вывод на экран АРМ аварийных или критических ситуаций, возникающих в ходе управления технологическим процессом;
- формирование необходимых отчетов о протекании технологического процесса, состоянии оборудования, паспортов произведенной продукции и т. п.

ФУНКЦИИ СОВРЕМЕННЫХ АСУ ТП
- Вычислительные средства верхнего уровня АСУ ТП обычно объединены локальной информационной сетью стандарта Ethernet и могут иметь выход в глобальные сети, например, в глобальную сеть предприятия или сеть Интернет.
- Информационная сеть верхнего уровня управления АСУ ТП полностью независима от сети контроллеров для исключения возможности взаимовлияния. Передача данных осуществляется через специальные устройства — шлюзы, программное обеспечение которых позволяет автоматически реконфигурировать структуру сети и каналы передачи данных при отказе отдельных элементов АСУ ТП
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
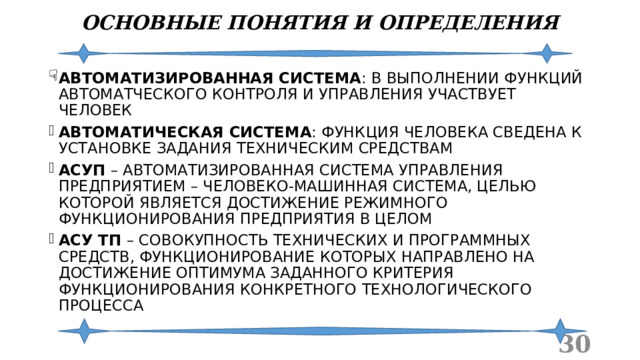
- АВТОМАТИЗИРОВАННАЯ СИСТЕМА : В ВЫПОЛНЕНИИ ФУНКЦИЙ АВТОМАТЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ УЧАСТВУЕТ ЧЕЛОВЕК
- АВТОМАТИЧЕСКАЯ СИСТЕМА : ФУНКЦИЯ ЧЕЛОВЕКА СВЕДЕНА К УСТАНОВКЕ ЗАДАНИЯ ТЕХНИЧЕСКИМ СРЕДСТВАМ
- АСУП – АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ПРЕДПРИЯТИЕМ – ЧЕЛОВЕКО-МАШИННАЯ СИСТЕМА, ЦЕЛЬЮ КОТОРОЙ ЯВЛЯЕТСЯ ДОСТИЖЕНИЕ РЕЖИМНОГО ФУНКЦИОНИРОВАНИЯ ПРЕДПРИЯТИЯ В ЦЕЛОМ
- АСУ ТП – СОВОКУПНОСТЬ ТЕХНИЧЕСКИХ И ПРОГРАММНЫХ СРЕДСТВ, ФУНКЦИОНИРОВАНИЕ КОТОРЫХ НАПРАВЛЕНО НА ДОСТИЖЕНИЕ ОПТИМУМА ЗАДАННОГО КРИТЕРИЯ ФУНКЦИОНИРОВАНИЯ КОНКРЕТНОГО ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА

ИЕРАРХИЧЕСКАЯ СТРУКТУРА СИСТЕМЫ АВТОМАТИЗАЦИИ

ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
- АРМ – АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА ТП
- ЛАСР ( АСР ) – ЛОКАЛЬНАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ (СТАБИЛИЗАЦИИ) ПАРАМЕТРА ТП
- АСК – АВТОМАТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРА ТП, СЛУЖАЩАЯ ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРА И ПРЕОБРАЗОВАНИЯ ЕГО ТЕКУЩЕГО ЗНАЧЕНИЯ В СИГНАЛ СТАНДАРТНОГО РЯДА ИЛИ В СИГНАЛ, ПРИГОДНЫЙ ДЛЯ НЕПОСРЕДСТВЕННОГО ВОСПРИЯТИЯ ОПЕРАТОРОМ
- АИЧ – АВТОМАТИЗИРОВАННАЯ ИСПОЛНИТЕЛЬНАЯ ЧАСТЬ АСР, СЛУЖАЩАЯ ДЛЯ ПРЕОБРАЗОВАНИЯ УПРАВЛЯЮЩЕГО СИГНАЛА В УПРАВЛЯЮЩЕЕ ВОЗДЕЙСТВИЕ В ВИДЕ ПЕРЕМЕННОГО КОЛИЧЕСТВА ВЕЩЕСТВА ИЛИ ЭНЕРГИИ

СТРУКТУРА ДВУХУРОВНЕВОЙ СИСТЕМЫ УПРАВЛЕНИЯ

ТИПОВАЯ СТРУКТУРА ЛОКАЛЬНОЙ АСР
Х вых – регулируемый параметр
Х зд – заданное значение регулируемого параметра
- – управляющий сигнал,
Q – управляющее воздействие
р – ручное
а - автоматическое

КЛАССИФИКАЦИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
КЛАСС
ПРИМЕРЫ
Гидро-механические
ПЕРЕМЕЩЕНИЕ ЖИДКОСТЕЙ И ГАЗОВ, РАЗДЕЛЕНИЕ НЕОДНОРОДНЫХ СИСТЕМ, ПЕРЕМЕШИВАНИЕ, ОЧИСТКА ГАЗОВ
Тепловые
Массообменные
НАГРЕВАНИЕ, ОХЛАЖДЕНИЕ, ВЫПАРИВАНИЕ, КРИСТАЛЛИЗАЦИЯ, ИСКУССТВЕННОЕ ОХЛАЖДЕНИЕ
РЕКТИФИКАЦИЯ, АБСОРБЦИЯ, АДСОРБЦИЯ, СУШКА, ЭКСТРАКЦИЯ
Механические
ИЗМЕЛЬЧЕНИЕ, ДОЗИРОВАНИЕ, СОРТИРОВКА, ТРАНСПОРТИРОВАНИЕ, ПЕРЕМЕШИВАНИЕ, ХРАНЕНИЕ.
Химические
ОКИСЛЕНИЕ, ВОССТАНОВЛЕНИЕ, СИНТЕЗ, РАЗЛОЖЕНИЕ СОЛЕЙ, ОБРАЗОВАНИЕ ГИДРОКСИДОВ, НЕЙТРАЛИЗАЦИЯ, ДЕГИДРАТАЦИЯ, ЭЛЕКТРОЛИЗ
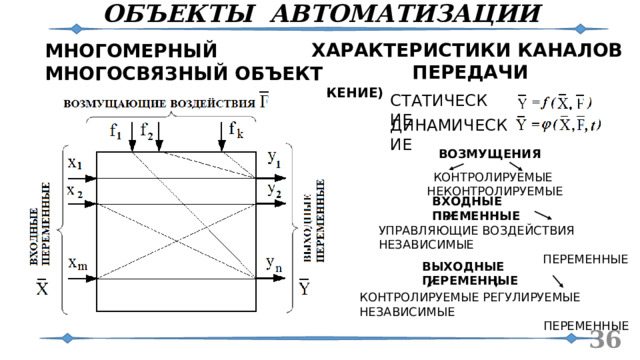
ОБЪЕКТЫ АВТОМАТИЗАЦИИ
ХАРАКТЕРИСТИКИ КАНАЛОВ
ПЕРЕДАЧИ
МНОГОМЕРНЫЙ МНОГОСВЯЗНЫЙ ОБЪЕКТ (УСЛОВНОЕ ГРАФИЧЕСКОЕ ИЗОБРАЖЕНИЕ)
СТАТИЧЕСКИЕ
ДИНАМИЧЕСКИЕ
ВОЗМУЩЕНИЯ
КОНТРОЛИРУЕМЫЕ НЕКОНТРОЛИРУЕМЫЕ
ВХОДНЫЕ ПРЕМЕННЫЕ
УПРАВЛЯЮЩИЕ ВОЗДЕЙСТВИЯ НЕЗАВИСИМЫЕ
ПЕРЕМЕННЫЕ
ВЫХОДНЫЕ ПЕРЕМЕННЫЕ
КОНТРОЛИРУЕМЫЕ РЕГУЛИРУЕМЫЕ НЕЗАВИСИМЫЕ
ПЕРЕМЕННЫЕ
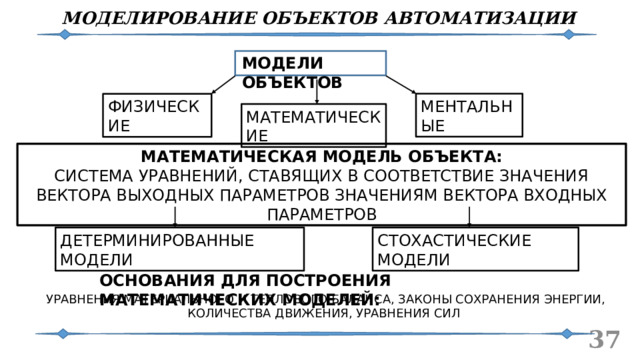
МОДЕЛИРОВАНИЕ ОБЪЕКТОВ АВТОМАТИЗАЦИИ
МОДЕЛИ ОБЪЕКТОВ
МЕНТАЛЬНЫЕ
ФИЗИЧЕСКИЕ
МАТЕМАТИЧЕСКИЕ
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА:
СИСТЕМА УРАВНЕНИЙ, СТАВЯЩИХ В СООТВЕТСТВИЕ ЗНАЧЕНИЯ ВЕКТОРА ВЫХОДНЫХ ПАРАМЕТРОВ ЗНАЧЕНИЯМ ВЕКТОРА ВХОДНЫХ ПАРАМЕТРОВ
ДЕТЕРМИНИРОВАННЫЕ МОДЕЛИ
СТОХАСТИЧЕСКИЕ МОДЕЛИ
ОСНОВАНИЯ ДЛЯ ПОСТРОЕНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ:
УРАВНЕНИЯ МАТЕРИАЛЬНОГО И ТЕПЛОВОГО БАЛАНСА, ЗАКОНЫ СОХРАНЕНИЯ ЭНЕРГИИ, КОЛИЧЕСТВА ДВИЖЕНИЯ, УРАВНЕНИЯ СИЛ
СВОЙСТВА ОБЪЕКТОВ АВТОМАТИЗАЦИИ
- ЕМКОСТЬ – СПОСОБНОСТЬ ОБЪЕКТА АККУМУЛИРОВАТЬ ВЕЩЕСТВО ИЛИ ЭНЕРГИЮ
- НАГРУЗКА – КОЛИЧЕСТВО ВЕЩЕСТВА ИЛИ ЭНЕРГИИ, ПРОХОДЯЩЕЕ ЧЕРЕЗ ОБЪЕКТ В ЕДИНИЦУ ВРЕМЕНИ
- САМОВЫРАВНИВАНИЕ – СПОСОБНОСТЬ ОБЪЕКТА ПРИХОДИТЬ В СОСТОЯНИЕ РАВНОВЕСИЯ БЕЗ ВМЕШАТЕЛЬСТВА ИЗВНЕ
- ЗАПАЗДЫВАНИЕ – ВРЕМЯ МЕЖДУ МОМЕНТОМ НАНЕСЕНИЯ ВОЗМУЩЕНИЯ НА ВХОД ОБЪЕКТА И ПОЯВЛЕНИЕМ ОТКЛИКА НА ВЫХОДЕ

ТИПОВЫЕ ЗВЕНЬЯ ОБЪЕКТОВ АВТОМАТИЗАЦИИ
АСТАТИЧЕСКОЕ (ИНТЕГРИРУЮЩЕЕ) ЗВЕНО ПЕРВОГО ПОРЯДКА
УРАВНЕНИЕ ДИНАМИКИ
УРАВНЕНИЕ СТАТИКИ
- ПОСТОЯННАЯ ВРЕМЕНИ ОБЪЕКТА

ТИПОВЫЕ ЗВЕНЬЯ ОБЪЕКТОВ АВТОМАТИЗАЦИИ
СТАТИЧЕСКОЕ (ИНЕРЦИОННОЕ, АПЕРИОДИЧЕСКОЕ) ЗВЕНО ПЕРВОГО ПОРЯДКА
УРАВНЕНИЯ СТАТИКИ
УРАВНЕНИЕ ДИНАМИКИ
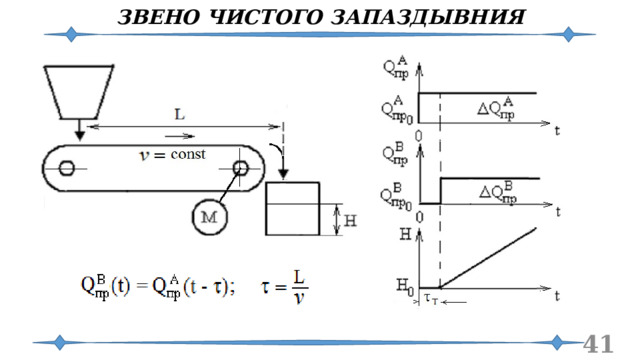
ЗВЕНО ЧИСТОГО ЗАПАЗДЫВНИЯ
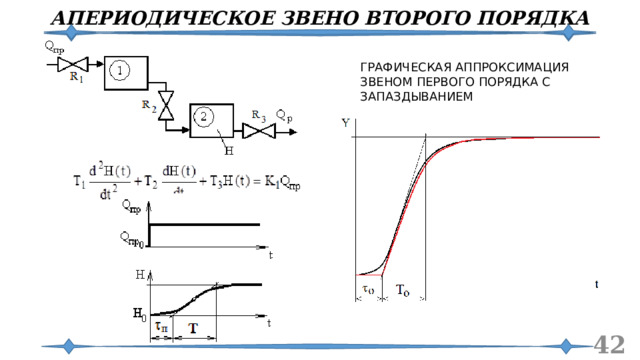
АПЕРИОДИЧЕСКОЕ ЗВЕНО ВТОРОГО ПОРЯДКА
ГРАФИЧЕСКАЯ АППРОКСИМАЦИЯ ЗВЕНОМ ПЕРВОГО ПОРЯДКА С ЗАПАЗДЫВАНИЕМ

МЕТОДЫ ОПРЕДЕЛЕНИЯ СВОЙСТВ ОБЪЕКТОВ
АНАЛИТИЧЕСКИЕ ЭКСПЕРИМЕНТАЛЬНЫЕ
(НА ОСНОВЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ)
АКТИВНЫЕ ПАССИВНЫЕ
ДЛЯ ПРОВЕРКИ АДЕКВАТНОСТИ МОДЕЛИ
НЕОБХОДИМ ЭКСПЕРИМЕНТ
ВОЗМУЩАЮЩИЕ
ВОЗДЕЙСТВИЯ
СТУПЕНЧАТОЕ
ИМПУЛЬСНОЕ
СИНУСОИДАЛЬНОЕ
ОБРАБОТКА РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА - ИДЕНТИФИКАЦИЯ
СТРУКТУРНАЯ
ПАРАМЕТРИЧЕСКАЯ
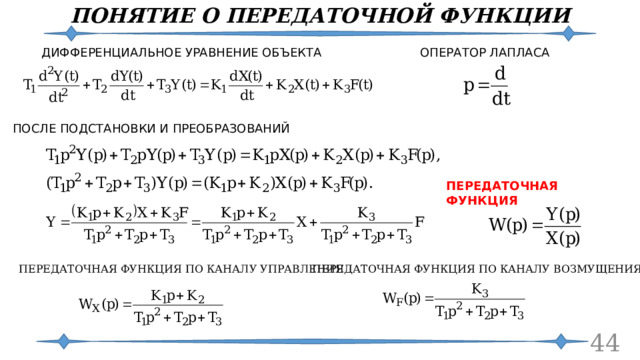
ПОНЯТИЕ О ПЕРЕДАТОЧНОЙ ФУНКЦИИ
ОПЕРАТОР ЛАПЛАСА
ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ОБЪЕКТА
ПОСЛЕ ПОДСТАНОВКИ И ПРЕОБРАЗОВАНИЙ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ПО КАНАЛУ ВОЗМУЩЕНИЯ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ПО КАНАЛУ УПРАВЛЕНИЯ
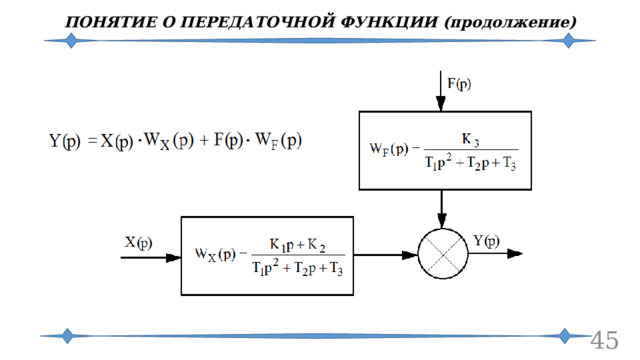
ПОНЯТИЕ О ПЕРЕДАТОЧНОЙ ФУНКЦИИ (продолжение)

ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ДИНАМИЧЕСКОГО ОБЪЕКТА
(НА ПРИМЕРЕ МЕХАНИЧЕСКОЙ СИСТЕМЫ)

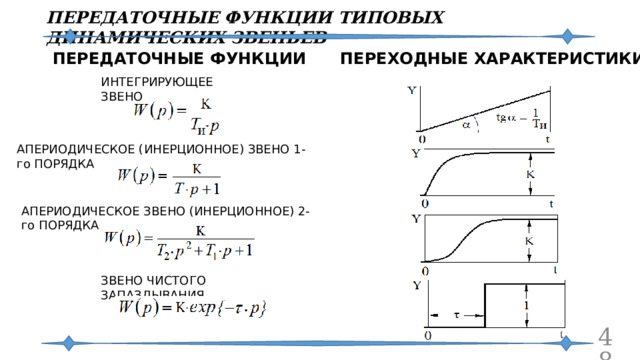
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
ВХОДНОЙ СИГНАЛ
ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
(ВРЕМЕНН А Я ОБЛАСТЬ)
(ОБЛАСТЬ ИЗОБРАЖЕНИЙ ПО ЛАПЛАСУ)
БЕЗЫНЕРЦИОННОЕ (УСИЛИТЕЛЬНОЕ) ЗВЕНО
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ТИПОВЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ
ИНТЕГРИРУЮЩЕЕ ЗВЕНО
АПЕРИОДИЧЕСКОЕ (ИНЕРЦИОННОЕ) ЗВЕНО 1-го ПОРЯДКА
АПЕРИОДИЧЕСКОЕ ЗВЕНО (ИНЕРЦИОННОЕ) 2-го ПОРЯДКА
ЗВЕНО ЧИСТОГО ЗАПАЗДЫВАНИЯ
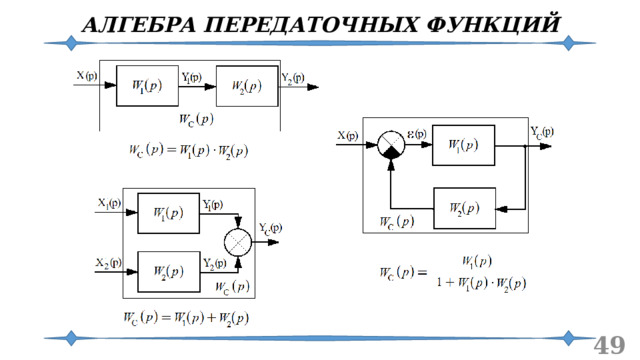
АЛГЕБРА ПЕРЕДАТОЧНЫХ ФУНКЦИЙ

П Р И М Е Р
ОТРИЦАТЕЛЬНАЯ ОБРАТНАЯ СВЯЗЬ ОБЕСПЕЧИВАЕТ УСТОЙЧИВОСТЬ ДИНАМИЧЕСКИХ СИСТЕМ
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ ИЗМЕРЕНИЙ
ФИЗИЧЕСКАЯ ВЕЛИЧИНА – СВОЙСТВО ПРЕДМЕТОВ ИЛИ ЯВЛЕНИЙ, ОДИНАКОВОЕ ДЛЯ НИХ В КАЧЕСТВЕННОМ ОТНОШЕНИИ, НО РАЗЛИЧНОЕ В КОЛИЧЕСТВЕННОМ ОТНОШЕНИИ
ИЗМЕРЕНИЕ – Нахождение одного или нескольких соотношений физической величины с её единицей опытным путём с помощью технических средств
ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ – техническое средство с нормативными метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи
ИЗМЕРИТЕЛЬНЫЙ ПРИБОР – ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ, СНАБЖЁННЫЙ УСТРОЙСТВОМ ИНДИКАЦИИ РЕЗУЛЬТАТА ИЗМЕРЕНИЯ
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
ПЕРВИЧНЫЕ (ДАТЧИКИ) ПРОМЕЖУТОЧНЫЕ

СТРУКТУРА ИЗМЕРИТЕЛЬНОЙ ЦЕПИ
y3
y2
y1
y4
ПрП
ИП
ПП
ОБЪЕКТ
y1 – измеряемый физический параметр;
y2 – промежуточный сигнал;
y3 – унифицированный сигнал;
y4 – результат измерения.
ПП – первичный преобразователь;
ПрП – промежуточный преобразователь;
ИП – измерительный прибор.

ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРОЦЕССА И СРЕДСТВ ИЗМЕРЕНИЙ
ПОГРЕШНОСТЬ ИЗМЕРЕНИЯ – разность между результатом измерения и опорным значением. В качестве опорного принимается значение измеряемой величины, соответствующее ей с пренебрежимо малой для данной задачи погрешностью, например, действительное значение.
ДОСТОВЕРНОСТЬ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ – СТЕПЕНЬ ДОВЕРИЯ К НИМ, ВЫРАЖЕННАЯ В ТЕРМИНАХ ТЕОРИИ ВЕРОЯТНОСТИ И МАТЕМАТИЧЕСКОЙ СТАТИСТИКИ
ВОСПРОИЗВОДИМОСТЬ ХАРАКТЕРИЗУЕТ СТЕПЕНЬ БЛИЗОСТИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ ОДНОЙ И ТОЙ ЖЕ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ , ПОЛУЧЕННЫХ В РАЗНЫХ УСЛОВИЯХ
СХОДИМОСТЬ ХАРАКТЕРИЗУЕТ СТЕПЕНЬ БЛИЗОСТИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ ОДНОЙ И ТОЙ ЖЕ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ , ПОЛУЧЕННЫХ ПРИ ПОВТОРНЫХ ИЗМЕРЕНИЯХ В ОДИНАКОВЫХ УСЛОВИЯХ
52
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРОЦЕССА И СРЕДСТВ ИЗМЕРЕНИЙ
ВАРИАЦИЯ – АЛГЕБРАИЧЕСКАЯ РАЗНОСТЬ ПОКАЗАНИЙ в одной и той же точке измерений ПРИ плавном подходе к ней со стороны больших и меньших значений
КЛАСС ТОЧНОСТИ ИЗМЕРИТЕЛЬНОГО ПРИБОРА – ОБОБЩЕННАЯ ХАРАКТЕРИСТИКА средства измерения, отражающая уровень точности, и выраженная в терминах точностных характеристик
ЧУВСТВИТЕЛЬНОСТЬ ИЗМЕРИТЕЛЬНОГО ПРИБОРА - ОТНОШЕНИЕ ИЗМЕНЕНИЯ СИГНАЛА НА ВЫХОДЕ ИЗМЕРИТЕЛЬНОГО ПРИБОРА К ВЫЗЫВАЮЩЕМУ ЕГО ИЗМЕНЕНИЮ ИЗМЕРЯЕМОЙ ВЕЛИЧИНЫ.
ПОРОГ ЧУВСТВИТЕЛЬНОСТИ – НАИМЕНЬШЕЕ ЗНАЧЕНИЕ ИЗМЕРЯЕМОЙ ВЕЛИЧИНЫ, начиная с которого ее можно измерять с помощью данного СРЕДСТВА ИЗМЕРЕНИЙ
52

ТЕХНИЧЕСКИЕ ИЗМЕРЕНИЯ
ВИДЫ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЙ
ПРЯМЫЕ КОСВЕННЫЕ
СТАТИЧЕСКИЕ ДИНАМИЧЕСКИЕ
МЕТОДЫ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЙ
МЕТОД
СРАВНЕНИЕ С МЕРОЙ
НЕПОСРЕДСТВЕННОЙ
ОЦЕНКИ
НУЛЕВОЙ МЕТОД
ДИФФЕРЕНЦИАЛЬНЫЙ
МЕТОД
52

ПРИНЦИП АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ
52

СИГНАЛЫ ГОСУДАРСТВЕННОЙ СИСТЕМЫ ПРИБОРОВ (ГСП)
ВЕТВИ ГСП
ВИД СИГНАЛА
электрическая
ПРЕДЕЛЫ ИЗМЕРЕНИЯ
- АНАЛОГОВЫЕ
- СИГНАЛЫ ПОСТОЯННОГО ТОКА:
- ТОКОВЫЕ
- НАПРЯЖЕНИЕ
0-5; 0-20; 4-20 мА
0-100мВ; 0-10; -10-0-10В
- СИГНАЛЫ ПЕРЕМЕННОГО ТОКА
- НАПРЯЖЕНИЕ
0-2; -1-0-1 В
- ВЗАИМОИНДУКТИВНОСТЬ
0-10; 10-0-10МГц
- ЧАСТОТА
ДИСКРЕТНЫЕ
4-8 кГц
КОДИРОВАННЫЕ СИГНАЛЫ (ЦИФРОВЫЕ)
пневматическая
Гост 13052-74
ДАВЛЕНИЕ СЖАТОГО ВОЗДУХА
гидравлическая
(0,02-0,1)МПа
ДАВЛЕНИЕ ЖИДКОСТИ
1-6,4 МПа
52

ОСНОВНЫЕ ПРЕОБРАЗОВАНИЯ ПРИ ТЕХНИЧЕСКИХ ИЗМЕРЕНИЯХ
ПРОМЕЖУТОЧНЫЕ СИГНАЛЫ

ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ

ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
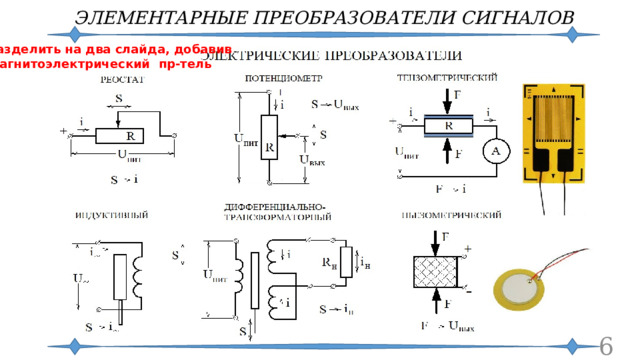
ЭЛЕМЕНТАРНЫЕ ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ
Разделить на два слайда, добавив
Магнитоэлектрический пр-тель
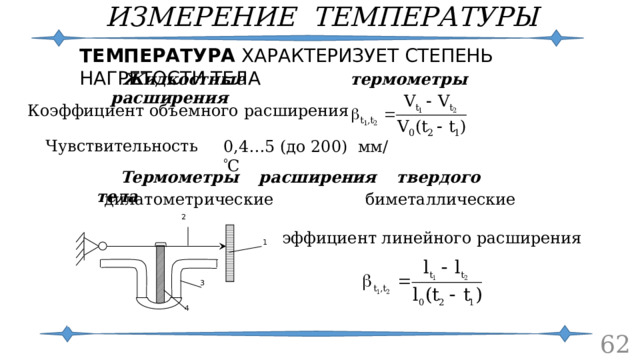
ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
ТЕМПЕРАТУРА ХАРАКТЕРИЗУЕТ СТЕПЕНЬ НАГРЕТОСТИ ТЕЛА
Жидкостные термометры расширения
Коэффициент объемного расширения
Чувствительность
0,4…5 (до 200) мм/ С
Термометры расширения твердого тела
дилатометрические биметаллические
2
Коэффициент линейного расширения
1
3
4

ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
Манометрические термометры
Диапазон измерения температуры от
-60 д - до 550°С
Класс точности 1, 1,5, 2
1 – термобаллон
2 – капилляр
3 – манометрическая трубка
4 – тяга
5 – рычаг
6 – зубчатый сектор
7 – шестерня
8 – указатель
9 – пружина обратной связи
62
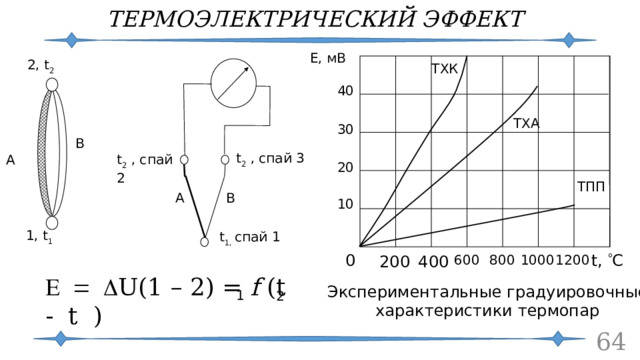
ТЕРМОЭЛЕКТРИЧЕСКИЙ ЭФФЕКТ
Е, мВ
2, t 2
ТХК
40
ТХА
30
В
А
t 2 , спай 3
t 2 , спай 2
20
ТПП
B
A
10
1, t 1
t 1, спай 1
0
t, С
400
200
800
600
1000
1200
E = D U(1 – 2) = f (t - t )
Экспериментальные градуировочные характеристики термопар
1
2
62
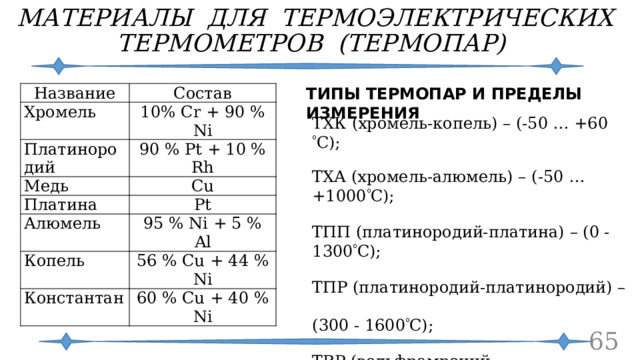
МАТЕРИАЛЫ ДЛЯ ТЕРМОЭЛЕКТРИЧЕСКИХ ТЕРМОМЕТРОВ (ТЕРМОПАР)
ТИПЫ ТЕРМОПАР И ПРЕДЕЛЫ ИЗМЕРЕНИЯ
Название
Хромель
Состав
10% Cr + 90 % Ni
Платинородий
Медь
90 % Pt + 10 % Rh
Cu
Платина
Pt
Алюмель
95 % Ni + 5 % Al
Копель
56 % Cu + 44 % Ni
Константан
60 % Cu + 40 % Ni
ТХК (хромель-копель) – (-50 … +60 С);
ТХА (хромель-алюмель) – (-50 … +1000 С);
ТПП (платинородий-платина) – (0 - 1300 С);
ТПР (платинородий-платинородий) –
(300 - 1600 С);
ТВР (вольфрамрений-вольфрамрений) –
(0-2200 С).
64
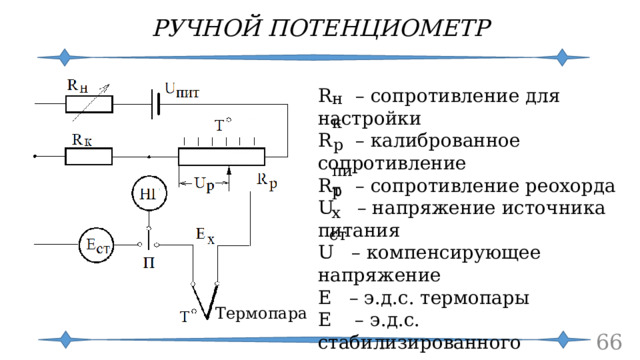
РУЧНОЙ ПОТЕНЦИОМЕТР
R – сопротивление для настройки
R – калиброванное сопротивление
R – сопротивление реохорда
U – напряжение источника питания
U – компенсирующее напряжение
Е – э.д.с. термопары
Е – э.д.с. стабилизированного источника питания
П – переключатель
НГ – нуль-гальванометр
н
к
р
пит
р
х
ст
Термопара

ТЕРМОПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ
МЕТАЛЛИЧЕСКИЕ
ПОЛУПРОВОДНИКОВЫЕ
Платина, медь, никель, железо
СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
Окислы магния, кобальта, титана, меди
R t = R 0 (1+ + t 2 )
R 0 – сопротивление при t = 0 С
R t = А е В/t
R
R
Т R
Fe *
Т R
Ni *
Cu
Pt
Т
Т

ТЕРМОПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ
МЕТАЛЛИЧЕСКИЕ
ПОЛУПРОВОДНИКОВЫЕ
ДИАПАЗОН ИЗМЕРЕНИЯ
(-200 … + 650) С
(-60 … + 280) С
ДОСТОИНСТВА:
- - ЛИНЕЙНОСТЬ ХАРАКТЕРИСТИК;
- - ПРОСТОТА ИЗГОТОВЛЕНИЯ;
- - ОТНОСИТЕЛЬНО ШИРОКИЙ ДИАПАЗОН ИЗМЕРЕНИЯ;
- - ВЫСОКАЯ НАДЕЖНОСТЬ.
- МАЛЫЕ ГАБАРИТЫ
- ВЫСОКАЯ ЧУВСТВИТЕЛЬНОСТЬ;
- НИЗКАЯ ИНЕРЦИОННОСТЬ.
НЕДОСТАТКИ:
- - БОЛЬШИЕ ГАБАРИТЫ;
- - СРАВНИТЕЛЬНО НИЗКАЯ ЧУВСТВИТЕЛЬНОСТЬ
- - БОЛЬШАЯ ИНЕРЦИОННОСТЬ (ДО 10 МИН).
- - ПЛОХАЯ ВОСПРОИЗВОДИМОСТЬ ХАРАКТЕРИСТИК;
- - ОГРАНИЧЕННЫЙ ДИАПАЗОН ИЗМЕРЕНИЯ;
- - ОГРАНИЧЕННЫЙ СРОК СЛУЖБЫ.
67

УРАВНОВЕШЕННАЯ МОСТОВАЯ ИЗМЕРИТЕЛЬНАЯ СХЕМА

ПИРОМЕТРЫ
ДИАПАЗОН ИЗМЕРЕНИЯ
-50 до 3000°С
МОБИЛЬНЫЙ ПИРОМЕТР С ЦИФРОВОЙ ИНДИКАЦИЕЙ РЕЗУЛЬТАТА ИЗМЕРЕНИЯ

ИЗМЕРЕНИЕ ДАВЛЕНИЯ
ВИДЫ ДАВЛЕНИЯ

ПРЕОБРАЗОВАТЕЛИ ДАВЛЕНИЯ
КЛАССИФИКАЦИЯ ПО ПРИНЦИПУ ДЕЙСТВИЯ
- ЖИДКОСТНЫЕ (ОСНОВАННЫЕ НА УРАВНОВЕШИВАНИИ ДАВЛЕНИЯ СТОЛБОМ ЖИДКОСТИ);
- ДЕФОРМАЦИОННЫЕ (ДАВЛЕНИЕ ИЗМЕРЯЕТСЯ ПО ВЕЛИЧИНЕ ДЕФОРМАЦИИ УПРУГОГО ЭЛЕМЕНТА);
- ЭЛЕКТРИЧЕСКИЕ (ДАВЛЕНИЕ ПРЕОБРАЗУЕТСЯ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ – ИЗМЕНЕНИЕ СОПРОТИВЛЕНИЯ ИЛИ НАПРЯЖЕНИЯ
По диапазону измерения
- МАНОМЕТРЫ
- ДИФФМАНОМЕТРЫ
- ВАКУУМЕТРЫ
- МАНОВАКУУМЕТРЫ
- НАПОРОМЕРЫ
- ТЯГОМЕРЫ
- ТЯГОНАПОРОМЕРЫ
 400 " width="640"
400 " width="640"
ЖИДКОСТНЫЕ МАНОМЕТРЫ
U-ОБРАЗНЫЙ МАНОМЕТР
ЧАШЕЧНЫЙ МАНОМЕТР
S/s 400
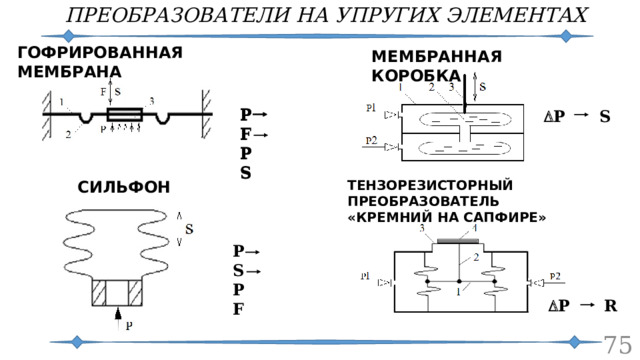
ПРЕОБРАЗОВАТЕЛИ НА УПРУГИХ ЭЛЕМЕНТАХ
ГОФРИРОВАННАЯ МЕМБРАНА
МЕМБРАННАЯ КОРОБКА
P F
P S
P F
P S
D P S
ТЕНЗОРЕЗИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ
СИЛЬФОН
«КРЕМНИЙ НА САПФИРЕ»
Р
l
Р
l
P S
P F
D P R
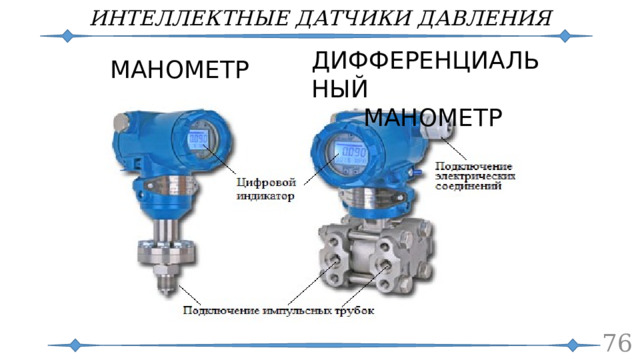
ИНТЕЛЛЕКТНЫЕ ДАТЧИКИ ДАВЛЕНИЯ
ДИФФЕРЕНЦИАЛЬНЫЙ
МАНОМЕТР
МАНОМЕТР
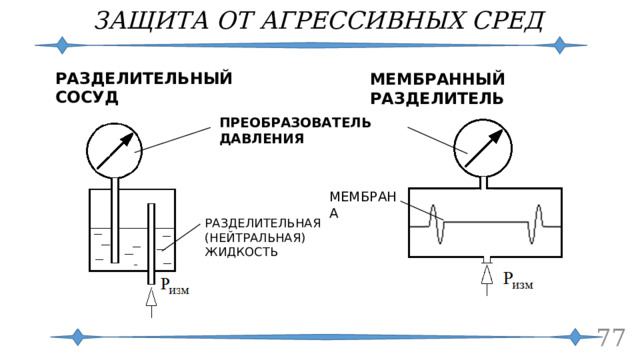
ЗАЩИТА ОТ АГРЕССИВНЫХ СРЕД
РАЗДЕЛИТЕЛЬНЫЙ СОСУД
МЕМБРАННЫЙ РАЗДЕЛИТЕЛЬ
ПРЕОБРАЗОВАТЕЛЬ ДАВЛЕНИЯ
МЕМБРАНА
РАЗДЕЛИТЕЛЬНАЯ
(НЕЙТРАЛЬНАЯ)
ЖИДКОСТЬ
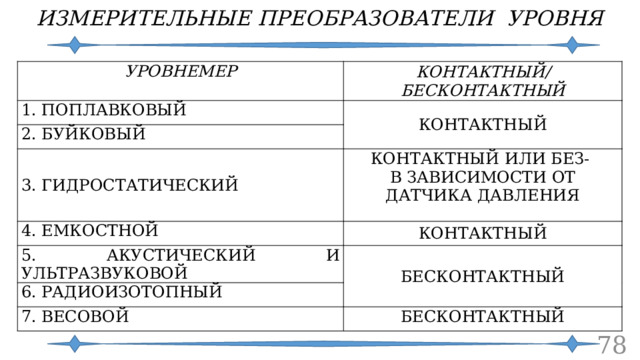
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
УРОВНЕМЕР
КОНТАКТНЫЙ/БЕСКОНТАКТНЫЙ
1. ПОПЛАВКОВЫЙ
КОНТАКТНЫЙ
2. БУЙКОВЫЙ
3. ГИДРОСТАТИЧЕСКИЙ
КОНТАКТНЫЙ ИЛИ БЕЗ-
4. ЕМКОСТНОЙ
В ЗАВИСИМОСТИ ОТ ДАТЧИКА ДАВЛЕНИЯ
КОНТАКТНЫЙ
5. АКУСТИЧЕСКИЙ И УЛЬТРАЗВУКОВОЙ
БЕСКОНТАКТНЫЙ
6. РАДИОИЗОТОПНЫЙ
7. ВЕСОВОЙ
БЕСКОНТАКТНЫЙ

ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
БУЙКОВЫЙ
ПОПЛАВКОВЫЙ
ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
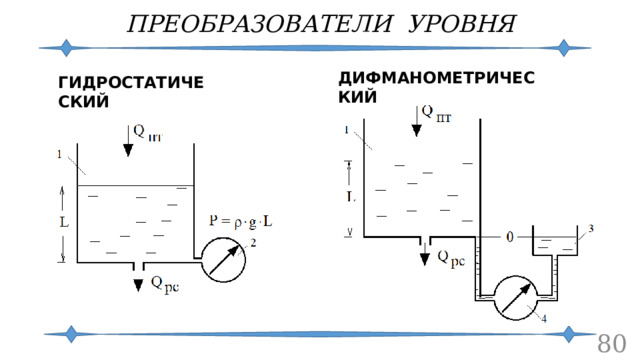
ДИФМАНОМЕТРИЧЕСКИЙ
ГИДРОСТАТИЧЕСКИЙ
ПРЕОБРАЗОВАТЕЛИ УРОВНЯ
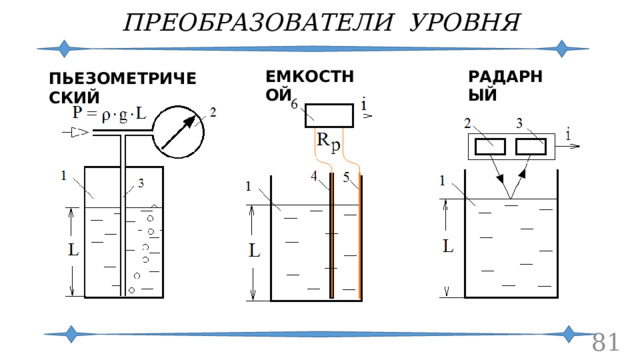
ЕМКОСТНОЙ
РАДАРНЫЙ
ПЬЕЗОМЕТРИЧЕСКИЙ

ИЗМЕРЕНИЕ РАСХОДА И КОЛИЧЕСТВА ВЕЩЕСТВ
РАСХОД – КОЛИЧЕСТВО ЖИДКОСТИ, ПАРА, СЫПУЧЕГО МАТЕРИАЛА ИЛИ ГАЗА, ПРОХОДЯЩЕЕ ЧЕРЕЗ ТЕХНОЛОГИЧЕСКИЙ ОБЪЕКТ В ЕДИНИЦУ ВРЕМЕНИ.
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ РАСХОДА ЖИДКОСТИ, ПАРА И ГАЗА

РАСХОДОМЕРЫ ДИНАМИЧЕСКОГО ДАВЛЕНИЯ
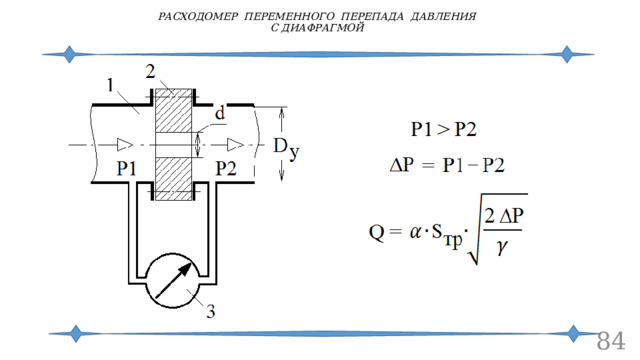
РАСХОДОМЕР ПЕРЕМЕННОГО ПЕРЕПАДА ДАВЛЕНИЯ С ДИАФРАГМОЙ

РАСХОДОМЕР ПОСТОЯННОГО ПЕРЕПАДА ДАВЛЕНИЯ
С ЭЛЕКТРИЧЕСКИМ ВЫХОДНЫМ
СИГНАЛОМ
С ПНЕВМАТИЧЕСКИМ
ВЫХОДНЫМ СИГНАЛОМ
РОТАМЕТР
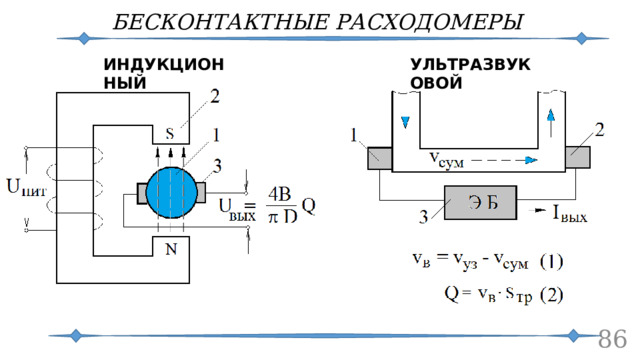
БЕСКОНТАКТНЫЕ РАСХОДОМЕРЫ
ИНДУКЦИОННЫЙ
УЛЬТРАЗВУКОВОЙ
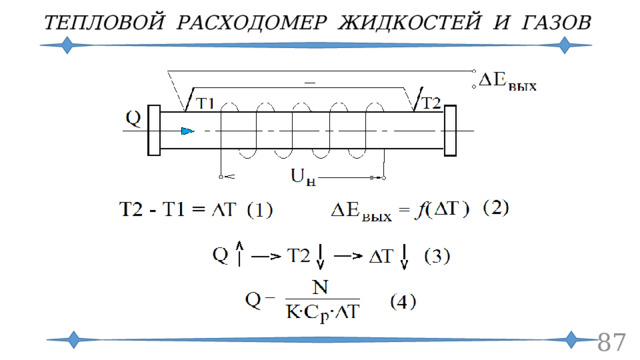
ТЕПЛОВОЙ РАСХОДОМЕР ЖИДКОСТЕЙ И ГАЗОВ
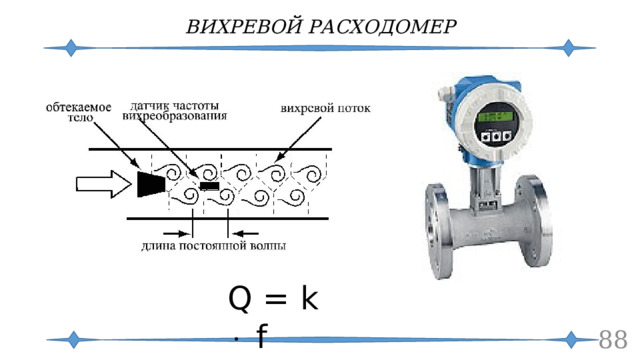
ВИХРЕВОЙ РАСХОДОМЕР
Q = k f

КОРИОЛИСОВЫЙ РАСХОДОМЕР
F = k
ВОЗМОЖНОСТИ «ИНТЕЛЛЕКТУАЛЬНЫХ» ДАТЧИКОВ
- ЦИФРОВАЯ ИНДИКАЦИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ ИЗМЕРЯЕМОГО ПАРАМЕТРА
- ЦИФРОВАЯ ИНДИКАЦИЯ ПАРАМЕТРОВ НАСТРОЙКИ
- УНИФИЦИРОВАННЫЕ ВЫХОДНЫЕ АНАЛОГОВЫЕ СИГНАЛЫ
- ВСТРОЕННАЯ КНОПОЧНАЯ ПАНЕЛЬ
- КОММУНИКАЦИОННЫЙ ПРОТОКОЛ HART ДЛЯ СВЯЗИ С УСТРОЙСТВАМИ СБОРА, ОБРАБОТКИ И ПЕРЕДАЧИ ЦИФРОВОЙ ИНФОРМАЦИИ
- САМОДИАГНОСТИКА И СИГНАЛИЗАЦИЯ ПРОБЛЕМ
- ВОЗМОЖНОСТЬ НАСТРОЙКИ С ПАНЕЛИ ИЛИ С ПОМОЩЬЮ HART-МОДЕМА:
- ДИАПАЗОНА ИЗМЕРЕНИЯ
- УСТАНОВКИ НУЛЯ
- ВЫБОРА ЕДИНИЦ ИЗМЕРЕНИЯ ПАРАМЕТРА
- ВРЕМЕНИ И ПАРАМЕТРОВ УСРЕДНЕНИЯ ВЫХОДНОГО СИГНАЛА (ФИЛЬТРАЦИИ)
- УДАЛЁННОГО ТЕСТИРОВАНИЯ ПАРАМЕТРОВ
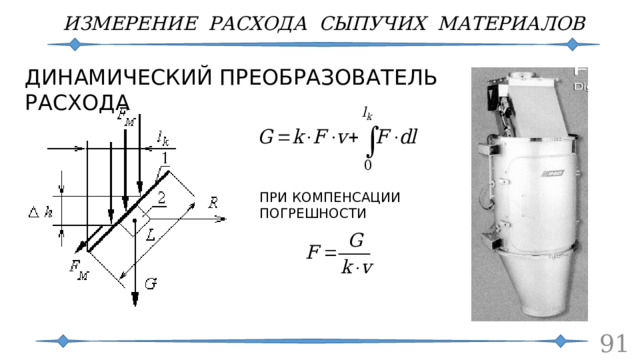
ИЗМЕРЕНИЕ РАСХОДА СЫПУЧИХ МАТЕРИАЛОВ
ДИНАМИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ РАСХОДА
ПРИ КОМПЕНСАЦИИ ПОГРЕШНОСТИ
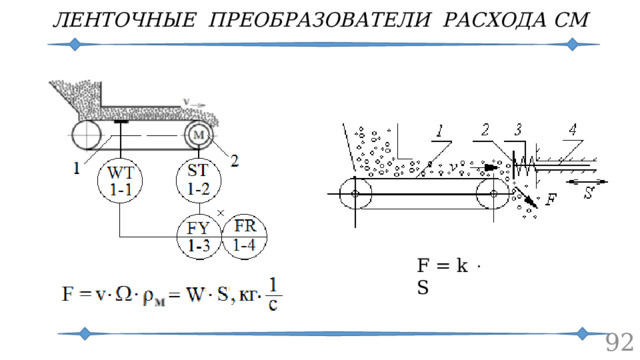
ЛЕНТОЧНЫЕ ПРЕОБРАЗОВАТЕЛИ РАСХОДА СМ
F = k S

ИМПЕЛЛЕРНЫЙ РАСХОДОМЕР СЫПУЧИХ МАТЕРИАЛОВ
(Impeller – крыльчатка)

ИЗМЕРЕНИЕ КАЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ВЕЩЕСТВ
ИЗМЕРЕНИЕ ПЛОТНОСТИ ЖИДКОСТЕЙ
БУЙКОВЫЙ ПЛОТНОМЕР
ГИДРОСТАТИЧЕСКИЙ ПЛОТНОМЕР

ИЗМЕРЕНИЕ ПЛОТНОСТИ ЖИДКОСТЕЙ
ПЬЕЗОМЕТРИЧЕСКИЙ ДИФФЕРЕНЦИАЛЬНЫЙ ПЛОТНОМЕР
ВЕСОВОЙ ПЛОТНОМЕР ЖИДКОСТИ
а)
D P = r g (H1 - H2)
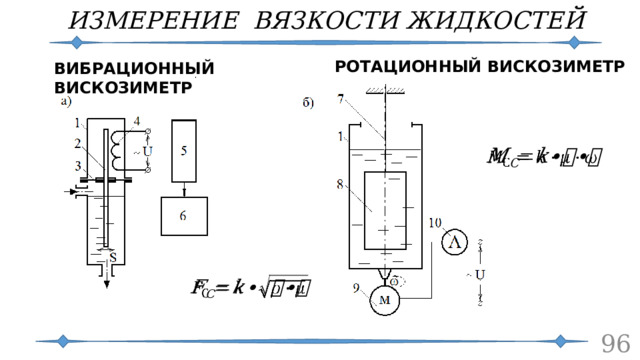
ИЗМЕРЕНИЕ ВЯЗКОСТИ ЖИДКОСТЕЙ
РОТАЦИОННЫЙ ВИСКОЗИМЕТР
ВИБРАЦИОННЫЙ ВИСКОЗИМЕТР
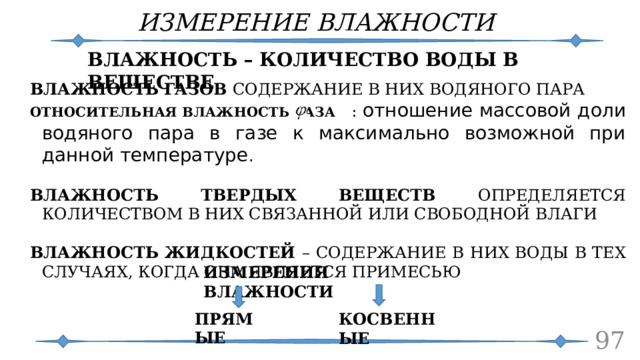
ИЗМЕРЕНИЕ ВЛАЖНОСТИ
ВЛАЖНОСТЬ – КОЛИЧЕСТВО ВОДЫ В ВЕЩЕСТВЕ
ВЛАЖНОСТЬ ГАЗОВ СОДЕРЖАНИЕ В НИХ ВОДЯНОГО ПАРА
ОТНОСИТЕЛЬНАЯ ВЛАЖНОСТЬ ГАЗА : отношение массовой доли водяного пара в газе к максимально возможной при данной температуре .
ВЛАЖНОСТЬ ТВЕРДЫХ ВЕЩЕСТВ ОПРЕДЕЛЯЕТСЯ КОЛИЧЕСТВОМ В НИХ СВЯЗАННОЙ ИЛИ СВОБОДНОЙ ВЛАГИ
ВЛАЖНОСТЬ ЖИДКОСТЕЙ – СОДЕРЖАНИЕ В НИХ ВОДЫ В ТЕХ СЛУЧАЯХ, КОГДА ОНА ЯВЛЯЕТСЯ ПРИМЕСЬЮ
ИЗМЕРЕНИЯ ВЛАЖНОСТИ
ПРЯМЫЕ
КОСВЕННЫЕ
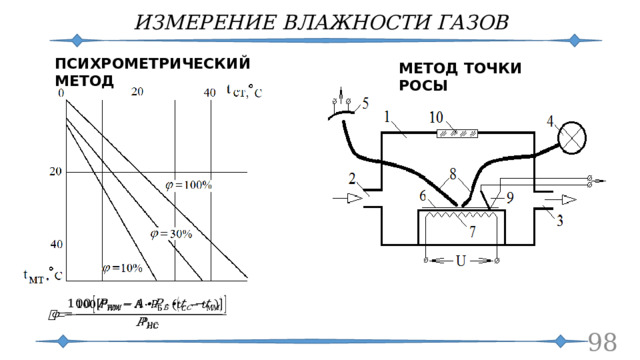
ИЗМЕРЕНИЕ ВЛАЖНОСТИ ГАЗОВ
ПСИХРОМЕТРИЧЕСКИЙ МЕТОД
МЕТОД ТОЧКИ РОСЫ

ИЗМЕРЕНИЕ ВЛАЖНОСТИ ЖИДКОСТЕЙ И СЫПУЧИХ ВЕЩЕСТВ
ИНФРАКРАСНЫЙ МЕТОД
Промежуточные преобразователи
- СНАЧАЛА ДОБАВИТЬ МАГНИТОЭЛЕКТРИЧЕСКИЙ
- ПОТОМ «ток-давление» и «сила (перемещение) – ток»
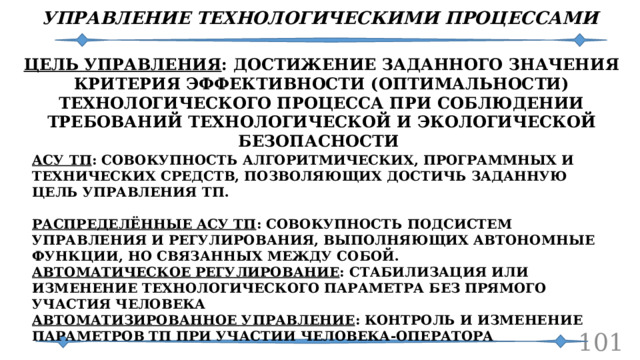
УПРАВЛЕНИЕ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
ЦЕЛЬ УПРАВЛЕНИЯ : ДОСТИЖЕНИЕ ЗАДАННОГО ЗНАЧЕНИЯ КРИТЕРИЯ ЭФФЕКТИВНОСТИ (ОПТИМАЛЬНОСТИ)
ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА ПРИ СОБЛЮДЕНИИ ТРЕБОВАНИЙ ТЕХНОЛОГИЧЕСКОЙ И ЭКОЛОГИЧЕСКОЙ БЕЗОПАСНОСТИ
АСУ ТП : СОВОКУПНОСТЬ АЛГОРИТМИЧЕСКИХ, ПРОГРАММНЫХ И ТЕХНИЧЕСКИХ СРЕДСТВ, ПОЗВОЛЯЮЩИХ ДОСТИЧЬ ЗАДАННУЮ ЦЕЛЬ УПРАВЛЕНИЯ ТП.
РАСПРЕДЕЛЁННЫЕ АСУ ТП : СОВОКУПНОСТЬ ПОДСИСТЕМ УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ, ВЫПОЛНЯЮЩИХ АВТОНОМНЫЕ ФУНКЦИИ, НО СВЯЗАННЫХ МЕЖДУ СОБОЙ.
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ : СТАБИЛИЗАЦИЯ ИЛИ ИЗМЕНЕНИЕ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА БЕЗ ПРЯМОГО УЧАСТИЯ ЧЕЛОВЕКА
АВТОМАТИЗИРОВАННОЕ УПРАВЛЕНИЕ : КОНТРОЛЬ И ИЗМЕНЕНИЕ ПАРАМЕТРОВ ТП ПРИ УЧАСТИИ ЧЕЛОВЕКА-ОПЕРАТОРА

ЗАДАЧИ, РЕШАЕМЫЕ ПРИ РАЗРАБОТКЕ АСУ ТП
ВЫБОР:
- РЕГУЛИРУЕМЫХ ПЕРЕМЕННЫХ
- КАНАЛОВ ПОДАЧИ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ
- КОНТРОЛИРУЕМЫХ ПЕРЕМЕННЫХ
- ПЕРЕМЕННЫХ, ДЛЯ КОТОРЫХ НЕОБХОДИМА СИГНАЛИЗАЦИЯ ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ
ОЦЕНКА ЭФФЕКТИВНОСТИ КАНАЛОВ КОНТРОЛЯ И СИГНАЛИЗАЦИИ:
- ПО ЧУВСТВИТЕЛЬНОСТИ
- ПО ДИАПАЗОНУ ИЗМЕНЕНИЯ ВЫХОДНОЙ ПЕРЕМЕННОЙ
ОЦЕНКА ЭФФЕКТИВНОСТИ КАНАЛОВ УПРАВЛЕНИЯ, БЛОКИРОВКИ, ЗАЩИТЫ :
- СТЕПЕНЬ ВЛИЯНИЯ ВХОДА НА ВЫХОД ПО КОЭФФИЦИЕНТУ ПЕРЕДАЧИ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ;
- БЫСТРОДЕЙСТВИЕ И ЗАПАЗДЫВАНИЕ ПО УРАВНЕНИЯМ ВРЕМЕННЫХ ХАРАКТЕРИСТИК ИЛИ ПО ПЕРЕДАТОЧНЫМ ФУНКЦИЯМ.

ТИПОВАЯ СТРУКТУРА ЛОКАЛЬНОЙ АСР
АСР – ОСНОВА ИЕРАРХИЧЕСКИХ РАСПРЕДЕЛЁННЫХ СИСТЕМ УПРАВЛЕНИЯ ТП
Х вых – регулируемый параметр
Х зд – заданное значение регулируемого параметра
- – управляющий сигнал
- – сигнал рассогласования, e = Х зд – Х вых
f – возмущающее воздействие

ОЦЕНКА ЭФФЕКТИВНОСТИ РАБОТЫ АСР
- ПЕРЕХОДНЫЙ ПРОЦЕСС – ИЗМЕНЕНИЕ ВЫХОДНОЙ ПЕРЕМЕННОЙ ЗАМКНУТОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ ПОСЛЕ ПОДАЧИ НА ОДИН ИЗ ЕЁ ВХОДОВ ТИПОВОГО «ВОЗМУЩАЮЩЕГО» ВОЗДЕЙСТВИЯ
- ВХОДНЫЕ ВОЗДЕЙСТВИЯ : ЗАДАЮЩЕЕ Хзд И ВОЗМУЩАЮЩЕЕ f
- УСТОЙЧИВОСТЬ (ПЕРЕХОДНЫХ ПРОЦЕССОВ) – ОЦЕНКА РАБОТОСПОСОБНОСТИ АСР
- КАЧЕСТВО ПЕРЕХОДНЫХ ПРОЦЕССОВ – ЧИСЛЕННЫЕ ЗНАЧЕНИЯ ОПРЕДЕЛЯЕМЫХ ПО ПАРАМЕТРАМ ПЕРЕХОДНОГО ПРОЦЕССА КРИТЕРИЕВ, НАИБОЛЕЕ ВАЖНЫХ ДЛЯ РЕШАЕМОЙ ЗАДАЧИ
- КРИТЕРИИ КАЧЕСТВА РЕГУЛИРОВАНИЯ = КРИТЕРИИ КАЧЕСТВА ПЕРЕХОДНЫХ ПРОЦЕССОВ – ПРЯМЫЕ И КОСВЕННЫЕ

ТИПОВЫЕ ВХОДНЫЕ ВОЗДЕЙСТВИЯ
ЕДИНИЧНЫЙ ИМПУЛЬС
ЕДИНИЧНЫЙ СКАЧОК
ЛИНЕЙНЫЙ МОНОТОННЫЙ
СИГНАЛ
ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
МГНОВЕННЫЙ ИМПУЛЬС
ФИЗИЧЕСКАЯ ПЕРЕМЕННАЯ В ОТНОСИТЕЛЬНЫХ ЕДИНИЦАХ: Х отн = Х(t)/X max

ВИДЫ ПЕРЕХОДНЫХ ПРОЦЕССОВ
КОЛЕБАТЕЛЬНЫЙ
ВХОДНОЕ ВОЗДЕЙСТВИЕ
ПО КАНАЛУ ЗАДАНИЯ
АПЕРИОДИЧЕСКИЙ
ВОЗМУЩЕНИЕ
АПЕРИОДИЧЕСКИЙ
МОНОТОННЫЙ
ВХОДНОЕ ВОЗДЕЙСТВИЕ
ПО КАНАЛУ ВОЗМУЩЕНИЯ
КОЛЕБАТЕЛЬНЫЙ

ОСНОВНЫЕ ПАРАМЕРЫ ПЕРЕХОДНЫХ ПРОЦЕССОВ
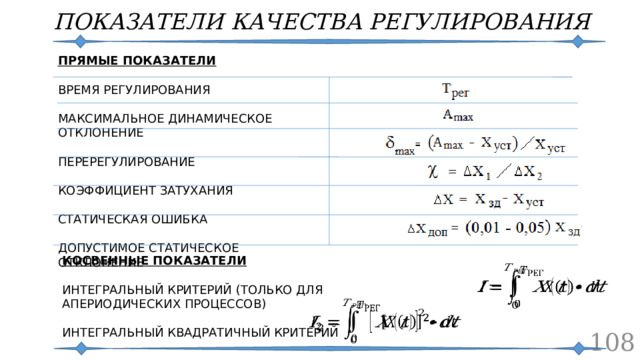
ПОКАЗАТЕЛИ КАЧЕСТВА РЕГУЛИРОВАНИЯ
ПРЯМЫЕ ПОКАЗАТЕЛИ
ВРЕМЯ РЕГУЛИРОВАНИЯ
МАКСИМАЛЬНОЕ ДИНАМИЧЕСКОЕ ОТКЛОНЕНИЕ
ПЕРЕРЕГУЛИРОВАНИЕ
КОЭФФИЦИЕНТ ЗАТУХАНИЯ
СТАТИЧЕСКАЯ ОШИБКА
ДОПУСТИМОЕ СТАТИЧЕСКОЕ ОТКЛОНЕНИЕ
КОСВЕННЫЕ ПОКАЗАТЕЛИ
ИНТЕГРАЛЬНЫЙ КРИТЕРИЙ (ТОЛЬКО ДЛЯ АПЕРИОДИЧЕСКИХ ПРОЦЕССОВ)
ИНТЕГРАЛЬНЫЙ КВАДРАТИЧНЫЙ КРИТЕРИЙ

АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
РЕГУЛЯТОР – АВТОМАТИЧЕСКОЕ УСТРОЙСТВО, ПРЕДНАЗНАЧЕННОЕ ДЛЯ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ НА ЗАДАННОМ ЗНАЧЕНИИ
РЕГУЛЯТОР – ПРЕОБРАЗОВАТЕЛЬ, ВЫХОДНОЙ СИГНАЛ КОТОРОГО ФОРМИРУЕТСЯ ПО ВЕЛИЧИНЕ РАЗНОСТИ ( РАССОГЛАСОВАНИЯ ) ЗАДАННОГО И ТЕКУЩЕГО ЗНАЧЕНИЙ РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ ТАК, ЧТОБЫ ВОЗДЕЙСТВУЯ НА НЕЁ, СВЕСТИ ЭТУ РАЗНОСТЬ К НУЛЮ
ЗАКОН РЕГУЛИРОВАНИЯ - МАТЕМАТИЧЕСКАЯ ЗАВИСИМОСТЬ, СВЯЗЫВАЮЩАЯ РАССОГЛАСОВАНИЕ И ТАКОЕ ВЫХОДНОЕ ВОЗДЕЙСТВИЕ, КОТОРОЕ ЕГО ЛИКВИДИРУЕТ
КОНТРОЛЛЕР – МНОГОКАНАЛЬНЫЙ РЕГУЛЯТОР С ВОЗМОЖНОСТЬЮ ПРОГРАММИРОВАНИЯ ЗАКОНА РЕГУЛИРОВАНИЯ , СНАБЖЁННЫЙ РЯДОМ ДОПОЛНИТЕЛЬНЫХ ФУНКЦИЙ
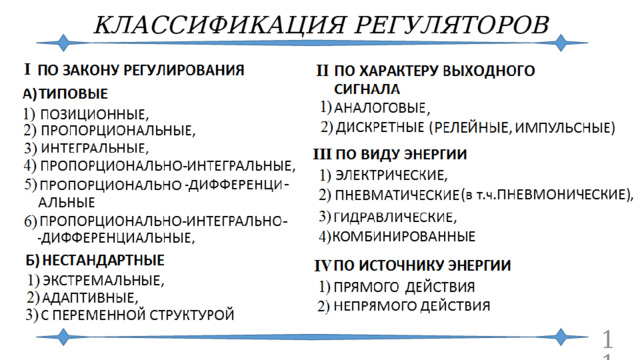
КЛАССИФИКАЦИЯ РЕГУЛЯТОРОВ

ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
ЗАКОН РЕГУЛИРОВАНИЯ
ПОЗИЦИОННЫЙ ( ПЗ ) РЕГУЛЯТОР

ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В АСР ПРИ ПОЗИЦИОННОМ РЕГУЛИРОВАНИИ

ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ГРАФИК ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ
ПРОПОРЦИОНАЛЬНЫЙ ( П ) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ПРОПОРЦИОНАЛЬНОМ РЕГУЛИРОВАНИИ

ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ГРАФИК ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ И-РЕГУЛЯТОРА
ИНТЕГРАЛЬНЫЙ ( И ) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ИНТРЕГРАЛЬНОМ
РЕГУЛИРОВАНИИ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ

ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ГРАФИК ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ
ПИ-РЕГУЛЯТОРА
ПРОПОРЦИОНАЛЬНО - ИНТЕГРАЛЬНЫЙ ( ПИ ) РЕГУЛЯТОР
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОМ РЕГУЛИРОВАНИИ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ

ТИПОВЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ( ПИД ) РЕГУЛЯТОР
ГРАФИК ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ
РЕАЛЬНОГО ПИД-РЕГУЛЯТОРА
ЗАКОН РЕГУЛИРОВАНИЯ
ПЕРЕХОДНЫЙ ПРОЦЕСС В АСР ПРИ ПИД-РЕГУЛИРОВАНИИ
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
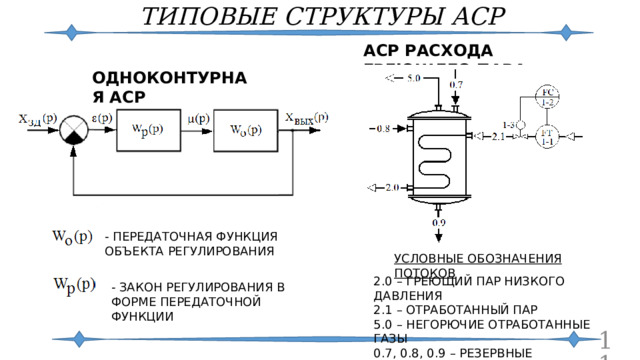
ТИПОВЫЕ СТРУКТУРЫ АСР
АСР РАСХОДА ГРЕЮЩЕГО ПАРА
ОДНОКОНТУРНАЯ АСР
- ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА РЕГУЛИРОВАНИЯ
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ПОТОКОВ
2.0 – ГРЕЮЩИЙ ПАР НИЗКОГО ДАВЛЕНИЯ
2.1 – ОТРАБОТАННЫЙ ПАР
5.0 – НЕГОРЮЧИЕ ОТРАБОТАННЫЕ ГАЗЫ
0.7, 0.8, 0.9 – РЕЗЕРВНЫЕ ОБОЗНАЧЕНИЯ
- ЗАКОН РЕГУЛИРОВАНИЯ В ФОРМЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ

КОМБИНИРОВАННАЯ АСР
КОМБИНИРОВАННАЯ АСР РАСХОДА КОМПОНЕНТА 0.8
УСЛОВИЕ ФИЗИЧЕСКОЙ РЕАЛИЗУЕМОСТИ КОРРЕКТОРА

КАСКАДНАЯ АСР
КАСКАДНАЯ АСР ТЕМПЕРАТУРЫ
УСЛОВИЯ РЕАЛИЗУЕМОСТИ

АСР МНОГОСВЯЗНЫХ ОБЪЕКТОВ
К - КОЭФФИЦИЕНТЫ ПЕРЕДАЧИ
i,j
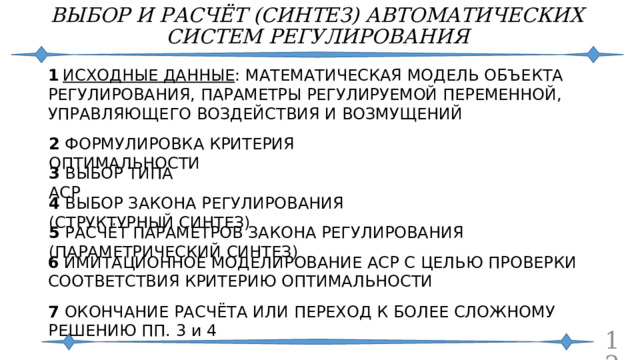
ВЫБОР И РАСЧЁТ (СИНТЕЗ) АВТОМАТИЧЕСКИХ СИСТЕМ РЕГУЛИРОВАНИЯ
1 ИСХОДНЫЕ ДАННЫЕ : МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА РЕГУЛИРОВАНИЯ, ПАРАМЕТРЫ РЕГУЛИРУЕМОЙ ПЕРЕМЕННОЙ, УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ И ВОЗМУЩЕНИЙ
2 ФОРМУЛИРОВКА КРИТЕРИЯ ОПТИМАЛЬНОСТИ
3 ВЫБОР ТИПА АСР
4 ВЫБОР ЗАКОНА РЕГУЛИРОВАНИЯ (СТРУКТУРНЫЙ СИНТЕЗ)
5 РАСЧЁТ ПАРАМЕТРОВ ЗАКОНА РЕГУЛИРОВАНИЯ (ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ)
6 ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ АСР С ЦЕЛЬЮ ПРОВЕРКИ СООТВЕТСТВИЯ КРИТЕРИЮ ОПТИМАЛЬНОСТИ
7 ОКОНЧАНИЕ РАСЧЁТА ИЛИ ПЕРЕХОД К БОЛЕЕ СЛОЖНОМУ РЕШЕНИЮ ПП. 3 и 4

МЕТОДИКИ СИНТЕЗА ТИПОВЫХ РЕГУЛЯТОРОВ
ВЫБОР ЗАКОНА РЕГУЛИРОВАНИЯ
ДЛЯ ЛИНЕЙНЫХ ОБЪЕКТОВ
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ТИПОВЫХ РЕГУЛЯТОРОВ
ФОРМАЛИЗОВАННЫЙ
ПРИБЛИЖЁННЫЙ МЕТОД
ПО ФОРМУЛАМ, СООТВЕТСТВУЮЩИМ ГРАНИЦЕ УСТОЙЧИВОСТИ (МЕТОД ЦИГЛЕРА – НИКОЛЬСА)
ЭВРИСТИЧЕСКИЙ МЕТОД
ЕСЛИ
ПО НОМОГРАММАМ ДЛЯ ОТДЕЛЬНЫХ ПРЯМЫХ ПОКАЗАТЕЛЕЙ КАЧЕСТВА РЕГУЛИРОВАНИЯ
ПОЗИЦИОННЫЙ РЕГУЛЯТОР
ЕСЛИ
РАСЧЁТ ПО ЗАДАННОЙ СТЕПЕНИ КОЛЕБАТЕЛЬНОСТИ ПЕРЕХОДНОГО ПРОЦЕССА (МЕТОД РЧХ)
НЕПРЕРЫВНЫЙ РЕГУЛЯТОР
ЕСЛИ
ПОИСКОВЫЙ МЕТОД НА ИМИТАЦИОННЫХ
МОДЕЛЯХ
МНОГОКОНТУРНАЯ АСР

ПРИБЛИЖЁННЫЕ МЕТОДЫ СИНТЕЗА РЕГУЛЯТОРОВ
ВЫБОР ЗАКОНА РЕГУЛИРОВАНИЯ
НОМОГРАММА ДЛЯ ПИ-РЕГУЛЯТОРА
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ОБЪЕКТА РЕГУЛИРОВАНИЯ
ВЫБОР НАСТРОЕК РЕГУЛЯТОРОВ
ЗАДАННЫЙ ПОКАЗАТЕЛЬ КАЧЕСТВА РЕГУЛИРОВАНИЯ
20%-е ПЕРЕРЕГУЛИРОВАНИЕ

ФИЗИЧЕСКАЯ РЕАЛИЗАЦИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ
БЕЗ ИСПОЛНИТЕЛЬНОЙ ЧАСТИ УПРАВЛЕНИЕ НЕВОЗМОЖНО

БАЗОВЫЕ ОПРЕДЕЛЕНИЯ
ЗАДАЧА ИСПОЛНИТЕЛЬНОЙ ЧАСТИ АСР – ПРЕОБРАЗОВАНИЕ УПРАВЛЯЮЩЕГО СИГНАЛА В УПРАВЛЯЮЩЕЕ ВОЗДЕЙСТВИЕ
УПРАВЛЯЮЩИЙ СИГНАЛ – МАЛОМОЩНЫЙ ВЫХОДНОЙ СИГНАЛ КОНТРОЛЛЕРА (0 – 5 Ма или др.)
УПРАВЛЯЮЩЕЕ ВОЗДЕЙСТВИЕ – ИЗМЕНЕНИЕ КОЛИЧЕСТВА ВЕЩЕСТВА ИЛИ ЭНЕРГИИ, ПОСТУПАЮЩИХ В ОБЪЕКТ УПРАВЛЕНИЯ

МЕТОДЫ И СРЕДСТВА ИЗМЕНЕНИЯ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ В АСР
ОБЪЁМНЫЙ МЕТОД
ДРОССЕЛЬНЫЙ МЕТОД
ТЕХНИЧЕСКИЕ СРЕДСТВА
РЕГУЛИРУЮЩИЕ ОРГАНЫ
КЛАПАНЫ
КРАНЫ
ЗАДВИЖКИ
ЗАСЛОНКИ
НАСОСЫ
ВОЗДУХОДУВНЫЕ АГРЕГАТЫ
ДОЗАТОРЫ
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
ЭЛЕКТРОДВИГАТЕЛИ
ЭЛЕКТРОМАГНИТЫ
ПНЕВМОПРИВОД

ДРОССЕЛЬНОЕ РЕГУЛИРОВАНИЕ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ
ПРИНЦИП ДЕЙСТВИЯ
РЕГУЛИРУЮЩИЕ ОРГАНЫ ДРОССЕЛЬНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ

ДРОССЕЛЬНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
РЕГУЛИРУЮЩИЙ КЛАПАН С МЕМБРАННЫМ ПНЕВМАТИЧЕСКИМ ПРИВОДОМ

ДРОССЕЛЬНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
РЕГУЛИРУЮЩИЙ КЛАПАН
РЕГУЛИРУЮЩИЙ КЛАПАН
ПОВОРОТНАЯ ЗАСЛОНКА С МЕМБРАННЫМ ПНЕВМОПРИВОДОМ
С ЭЛЕКТРОПРИВОДОМ
С МЕМБРАННЫМ ПНЕВМОПРИВОДОМ

ИНТЕГРАЦИЯ ДРОССЕЛЬНЫХ ИУ В КОНТУР АСР
ИУ С МЕМБРАННЫМ ПНЕВМАТИЧЕСКИМ ИМ
ИУ С ЭЛЕКТРОДВИГАТЕЛЬНЫМ ИМ
Q = f ( a)
Q = f(P)

ОБЪЁМНОЕ РЕГУЛИРОВАНИЕ РАСХОДА ЖИДКОСТЕЙ И ГАЗОВ
Q = f(P)
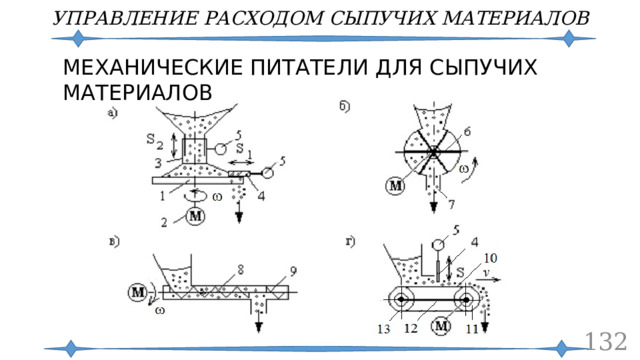
УПРАВЛЕНИЕ РАСХОДОМ СЫПУЧИХ МАТЕРИАЛОВ
МЕХАНИЧЕСКИЕ ПИТАТЕЛИ ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ

УПРАВЛЕНИЕ РАСХОДОМ СЫПУЧИХ МАТЕРИАЛОВ
ВЕРТИКАЛЬНЫЙ ПНЕВМАТИЧЕСКИЙ ПИТАТЕЛЬ
ВИБРАЦИОННЫЙ ПИТАТЕЛЬ
Q = F (P)
Q = f (A, w)
P

ПОНЯТИЕ О ДОЗИРОВАНИИ ВЕЩЕСТВ
ДОЗИРОВАНИЕ – ОТМЕРИВАНИЕ И ВЫДАЧА ЗАДАННОГО КОЛИЧЕСТВА ВЕЩЕСТВА В ВИДЕ ПОРЦИЙ (ДОЗ) ИЛИ НЕПРЕРЫВНОГО ПОТОКА, С ПОГРЕШНОСТЬЮ, НЕ ПРЕВЫШАЮЩЕЙ ПРЕДЕЛОВ ДОПУСКАЕМОГО ОТКЛОНЕНИЯ
ДОЗАТОРЫ
С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ
С ЭЛЕКТРОДВИГАТЕЛЬНЫМ ПРИВОДОМ
С ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ
ЖИДКОСТЕЙ
СЫПУЧИХ ВЕЩЕСТВ
НЕПРЕРЫВНОГО ДЕЙСТВИЯ
ДИСКРЕТНОГО ДЕЙСТВИЯ
С ПОДВИЖНЫМИ РАБОЧИМИ ОРГАНАМИ
БЕЗ ДВИЖУЩИХСЯ ЭЛЕМЕНТОВ
ВЕСОВЫЕ
ОБЪЁМНЫЕ
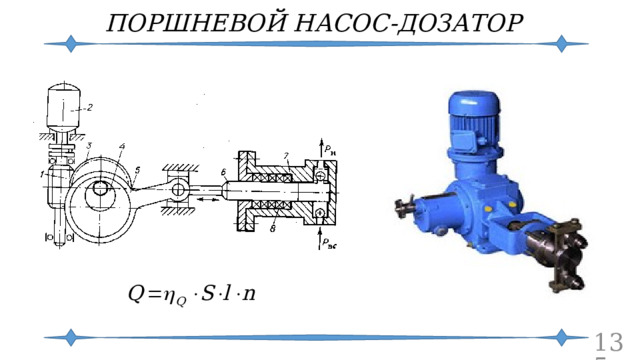
ПОРШНЕВОЙ НАСОС-ДОЗАТОР

МЕМБРАННЫЙ НАСОС-ДОЗАТОР
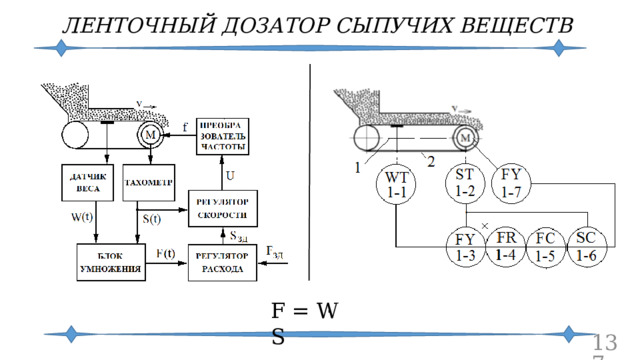
ЛЕНТОЧНЫЙ ДОЗАТОР СЫПУЧИХ ВЕЩЕСТВ
.
F = W S

ЛЕНТОЧНЫЙ ДОЗАТОР СЫПУЧИХ ВЕЩЕСТВ «ДОЗА»
1 – ЛЕНТОЧНЫЙ ПИТАТЕЛЬ
2 – ШКАФ УПРАВЛЕНИЯ
3 – ПУЛЬТ УПРАВЛЕНИЯ
4 – ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ

ЛЕНТОЧНЫЙ АВТОМАТИЧЕСКИЙ ДОЗАТОР
1
5
4
3
2
АТК – МНОГОПАРАМЕТРИЧЕСКАЯ СИСТЕМА
- ЭЛЕМЕНТЫ АТК
- ПРОЕКТИРОВАНИЕ АТК ТРЕБУЕТ ОПРЕДЕЛЕНИЯ МЕЖДИСЦИПЛИНАРНЫХ СВЯЗЕЙ

ВОПРОСЫ К ЗАЧЁТУ И ЭКЗАМЕНУ
- Автоматизация технологических процессов: основные понятия и определения.
- Иерархическая структура систем автоматизации
- Структура и состав локальных автоматических систем регулирования
- Технологический процесс как объект автоматизации. Классификации ТП
- Характеристики объектов автоматизации
- Понятие о моделировании объектов
- Типовые линейные звенья (основные): уравнения, переходные характеристики
- Понятие о передаточной функции. Передаточные функции типовых звеньев
- Алгебра передаточных функций
- Основные понятия теории измерений

ВОПРОСЫ 2
11. Характеристики процесса измерения и средств измерений.
12. Виды технических измерений
13. Автоматическое измерение. Структура автоматического измерительного прибора
14. Государственная система приборов
15. Структура измерительной цепи
16. Основные физические зависимости, используемые при косвенных измерениях технологических параметров
17. Элементарные преобразователи сигналов. Механические преобразователи
18.Элементарные преобразователи сигналов. Пневматические преобразователи
19. Элементарные преобразователи сигналов. Электрические преобразователи
20. Температура как технологический параметр и объект измерения. Термометры расширения
21. Манометрические термометры

ВОПРОСЫ 3
22. Термоэлектрический эффект. Термоэлектрические термометры
23. Потенциометрический метод измерения
24. Термопреобразователи сопротивления.
25. Мостовая измерительная схема.
26. Дистанционное измерение температуры. Пирометры.
27. Давление как технологический параметр и объект измерения. Виды давления.
28. Преобразователи давления: виды, классификация.
29. Жидкостные манометры.
30. Упругие чувствительные элементы. Дифференциальные манометры.
31.Особенности интеллектуальных первичных преобразователей.
32. Защита первичных преобразователей давления от агрессивных сред.
33. Первичные преобразователи уровня. Буйковые уровнемеры.
34. Поплавковые и гидростатические уровнемеры.

ВОПРОСЫ 4
35.Пьезометрический, радарный и ёмкостной уровнемеры.
36.Измерение расхода и количества вещества. Классификация расходомеров.
37. Расходомеры динамического давления.
38. Расходомеры постоянного перепада давления.
39. Расходомеры переменного перепада давления.
40. Бесконтактные расходомеры.
41. Вихревой и кориолисовый расходомеры.
42. Измерение расхода сыпучих материалов. Динамический расходомер.
43. Расходомер на базе ленточного питателя. Импеллерный расходомер.
44. Измерение плотности жидкостей. Гидростатический и буйковый плотномеры.
45. Весовой плотномер жидкостей. Дифференциальный пьезометрический плотномер.

ВОПРОСЫ 5
46. Измерение вязкости жидкостей. Вибрационный и ротационный вискозиметры.
47. Влажность веществ и методы её измерения.
48. Измерение влажности газов. Психрометрический метод.
49. Метод точки росы.
50. Измерение влажности жидкостей и сыпучих веществ.
51. Управление технологическими процессами. Основные понятия и определения.
52. Задачи, решаемые при разработке АСУ ТП.
54. Оценка устойчивости и качества регулирования в АСР.
55. Автоматические регуляторы. Классификация
56. Позиционное регулирование. Пропорционально-интегральный регулятор.

ВОПРОСЫ 6
57. Принцип инвариантности. Комбинированная АСР.
58. Каскадные АСР.
59. АСР многосвязных объектов.
60. Методики структурного и параметрического синтеза промышленных регуляторов.
61. Методы и средства физической реализации управляющих воздействий в АСР.
62. Дроссельные исполнительные устройства для жидкостей и газов.
63. Объёмное регулирование расхода жидкостей и газов. Технические средства.
64. Интеграция исполнительных устройств в контур регулирования. Методы и средства.
ВОПРОСЫ 7
65. Питатели для сыпучих материалов – исполнительные устройства АСР
66. Понятие о дозировании веществ. Классификация дозаторов. Дозаторы как исполнительные устройства АСР.
РЕКОМЕНДАЦИИ
1. Рекомендуемая структура ответа на любой вопрос : назначение, устройство, действие, сравнение с аналогами.
2. Ответы на теоретические вопросы должны иллюстрироваться практическими примерами
3. Ответы на вопросы практического характера должны быть обоснованы теоретически .







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

