
п Тарасовский, Россия


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 26.05.2025 12:47

Ланге Мария Оттовна
педагог дополнительного образования
37 лет
Местоположение
Специализация
Итоговая оценка результатов освоения дополнительной программы технической направленности по разделу «Основные действия набора LEGO EV3»
Категория:
Внеурочка
26.12.2024 08:43

Просмотр содержимого документа
«Итоговая оценка результатов освоения дополнительной программы технической направленности по разделу «Основные действия набора LEGO EV3»»
Итоговая оценка результатов освоения дополнительной программы технической направленности по разделу: «Основные действия набора LEGO EV3»
Ф. И. О. обучающегося ______________________________________________
Дата проведения____________________________________________________
| № | Задание | Варианты ответов | Ответ | уровень освоения программы (2 балла) |
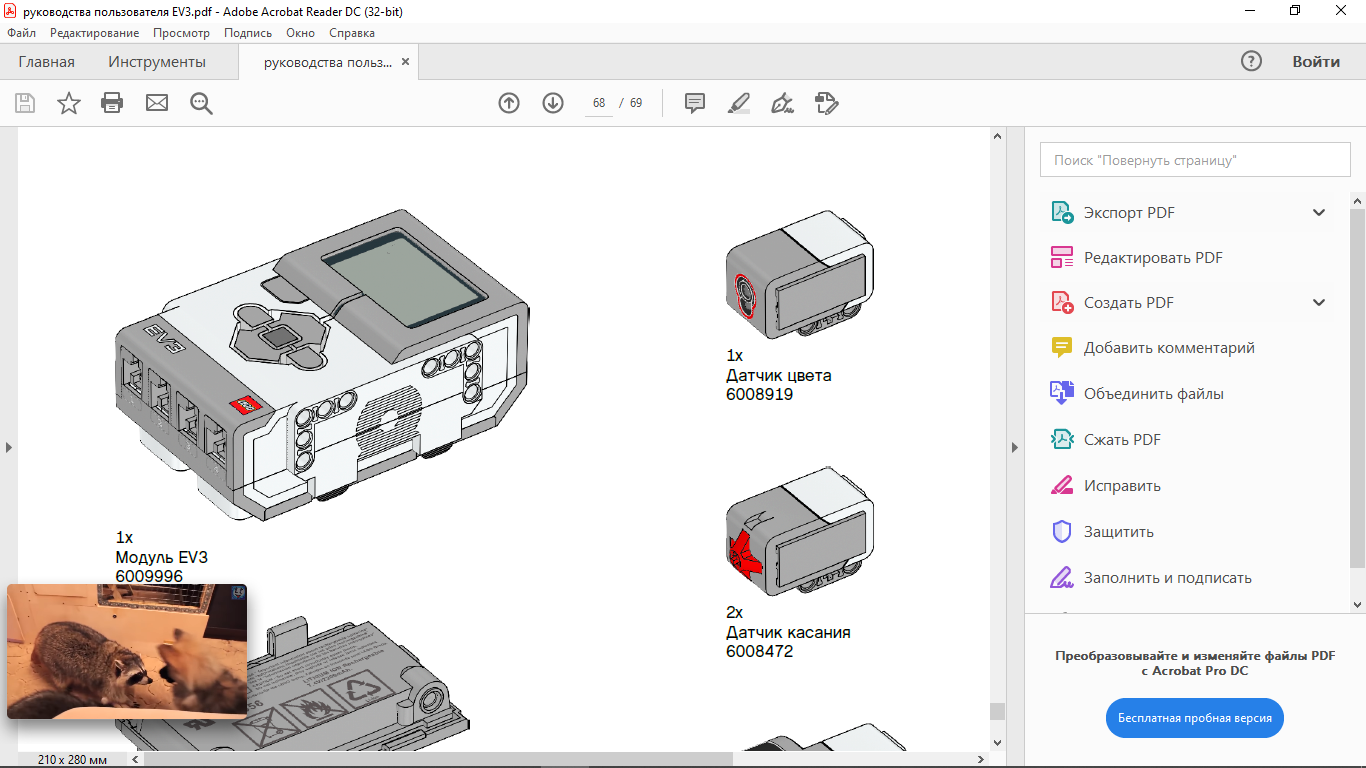
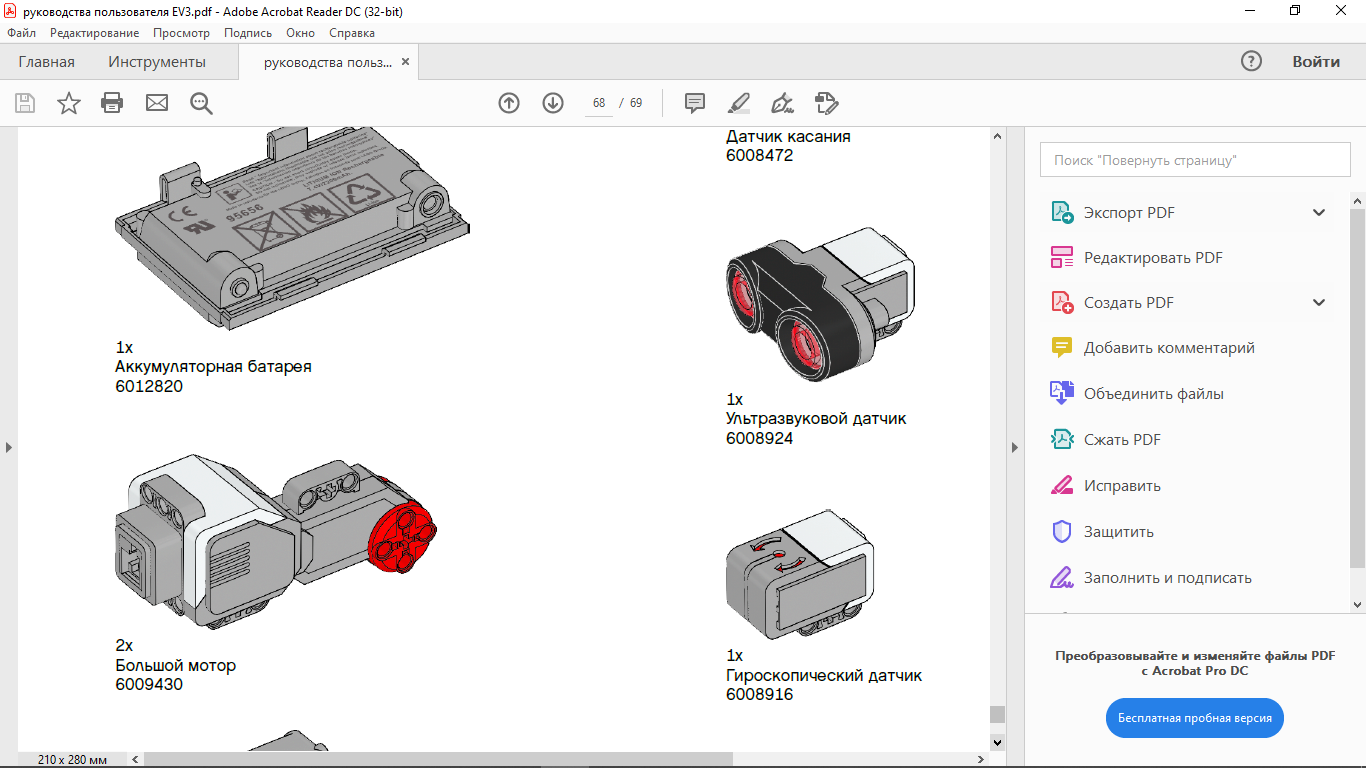
| 1 | Выберите и напишите пару электронных деталей с названием?
Датчик касания; Ультразвуковой датчик; Датчик цвета; Модуль EV3 Большой мотор; Гироскопический датчик. | а) в) д) | | |
| 2 | Выберите и напишите, если для подключения датчика к EV3 требуется подсоединить один конец кабеля к датчику, а другой… | а) оставить свободным; б) к одному из входных (1,2,3,4) портов EV3; в) к аккумулятору; г) к одному из выходных (A, B, C, D) портов EV3. | | |
| 3 | Выберите и напишите, если вашему роботу, собранному из набора LEGO® MINDSTORMS® Education EV3, необходимо проехать 84 градуса оборота колеса, какой режим для мотора вы выберете?
| а) включить на количество градусов; б) включить на количество оборотов; в) включить на количество секунд; г) включить; д) выключить.
| | |
| 4 | Выберите и напишите, как называется блок, представленный на рисунке?
| а) переключатель; б) ожидание; в) цикл; г) запуск. | | |
| 5 | Выберите и напишите, пару каждому блоку с названием?
движение; события; датчики; моторы; звук; дисплей. | б) в) г) д) е) | | |
| | Итого: | | ||
 г)
г) 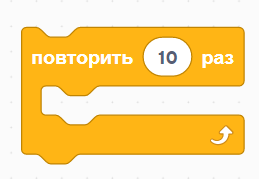
 а)
а) Руководитель: Ланге Мария Оттовна _____________________
подпись
Правильные ответы на тест по разделу: «Основные действия набора LEGO EV3»
| Задание | 1 | 2 | 3 | 4 | 5 |
| Ответ | 1-в,2-г,3-б, 4-а,5-е,6-д. | Б | а | в | 1-в,2-а,3-е, 4-б,5-д,6-г. |
| Балл | 2 | 2 | 2 | 2 | 2 |
Практическая работа
Задание. Собрать из базового набора 45544 – LEGO® MINDSTORMS® Education EV3 приводную платформу с ультразвуковым датчиком для движения.
Программа. Движение приводной платформы по заданной траектории. Варианты для самостоятельной работы:
Вариант №1.
Запрограммируйте робота при помощи ультразвукового датчика измерять расстояние в сантиметрах до цветного квадрата до тех пор, пока расстояние между датчиком и квадратом не будет меньше или равно 15 см. Как только расстояние станет 15 см., на экране контроллера появляется на 5 сек. стандартное изображение «Uр». Все данные измерения должны отображаться на экране контроллера.
Вариант №2.
Запрограммируйте робота при помощи ультразвукового датчика измерять расстояние в сантиметрах до цветного квадрата до тех пор, пока расстояние между датчиком и квадратом не будет равно 10 см. Как только расстояние станет 10 см., на экране контроллера появляется на 1 сек. стандартное изображение «Uр». Все данные измерения должны отображаться на экране контроллера.
Вариант №3.
Запрограммируйте робота при помощи ультразвукового датчика измерять расстояние в сантиметрах до цветного квадрата до тех пор, пока расстояние между датчиком н квадратом не будет меньше 9 см. Как только расстояние станет менее 9 см., воспроизвести звуковой сигнал из перечня стандартных звуковых сигналов LEGO. Продолжительность сигнала 2 сек. Все данные измерения должны отображаться на экране контроллера.
Вариант №4.
Запрограммируйте робота при помощи ультразвукового датчика измерять расстояние в сантиметрах до цветного квадрата до тех пор, пока расстояние между датчиком и квадратом не будет меньше или равно 12 см. Как только расстояние станет менее 12 см., воспроизвести звуковой сигнал из перечня стандартных звуковых сигналов LEGO. Продолжительность сигнала 1 сек. Все данные измерения должны отображаться на экране контроллера.
Вариант №5.
Запрограммируйте робота при помощи ультразвукового датчика измерять расстояние в сантиметрах до цветного квадрата до тех пор, пока расстояние между датчиком н квадратом не будет равно 10 см. Как только расстояние станет менее 10 см., воспроизвести звуковой сигнал из перечня стандартных звуковых сигналов LEGO. Продолжительность сигнала 3 сек. Все данные измерения должны отображаться на экране контроллера.
Требования к презентации действующей модели приводной платформы:
| ФИО обучающегося | ||
| № | Наименование критерия | Балл (по 2 балла) |
| 1 | Эффективность выбора конструкции модели под поставленную задачу (жесткость, подвижность) |
|
| 2 | Правильность соединения деталей |
|
| 3 | Сложность конструкции |
|
| 4 | Полнота выполнения задачи |
|
| 5 | Коммуникативность (умение отвечать на вопросы) |
|
|
| Итого: |
|








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

