
Беларусь, Минск


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 18.09.2025 17:42

Хартон Марина Игоревна
48 лет
Местоположение
Специализация
La cinématique étudie le mouvement des corps indépendamment des forces qui les produisent...
Категория:
Французский язык
10.08.2021 16:27

Просмотр содержимого документа
«La cinématique étudie le mouvement des corps indépendamment des forces qui les produisent...»
CINEMATIQUE 
 droites parallèles de direction l’axe de
droites parallèles de direction l’axe de
 2 2 +2 (’ ’où
2 2 +2 (’ ’où 
 ’0 + 2 à(8 —al)
’0 + 2 à(8 —al)
A- Généralités
La cinématique étudie le mouvement des corps indépendamment des forces qui les produisent. Elle permet de définir la géométrie et les dimensions des composants, et participe à I'étude dynamique et énergétique d'un mécanisme.
- NOTION DE REFERENTIEL :
Un système de référence (référentiel) est l'addition d'un repère spatial de référence et d'un repère temporel de référence.
Repàre de référence
Le mouvemen† d'un solide (S1) es† défini par rappor† à un au†re solide (SO) choisi comme solide de référence. Un repère dit de référence est « collé » sur (SO), permettant de repérer avec précision la position e† le mouvemen† du solide (S1).
Notation : M* 1/0 est le mouvement de (S1) par rapport à (50).
Repère de †emDs :
Le temps est considéré comme uniforme et absolu. Sa représentation est une droite graduée
orientée.
La lettre t, appelée date ou instant, symbolise un point de cette droite.
La distance entre deux dates est appelée durée.
L'origine du repère de temps est choisi à t=O.
Le mouvement d’un solide dépend du repère de référence considéré.
Mouvement absolu :
Un repère absolu est considéré comme au repos dans I’univers (repère galilléen). Le mouvement d'un solide est dit absolu s'il est décrit par rapport à un repère absolu.
Mouvement relatif
Un repère relatif est en mouvement par rapport au repère absolu. Le mouvement d'un solide est dit relatif s’il est décrit par rapport à un repère relatif.
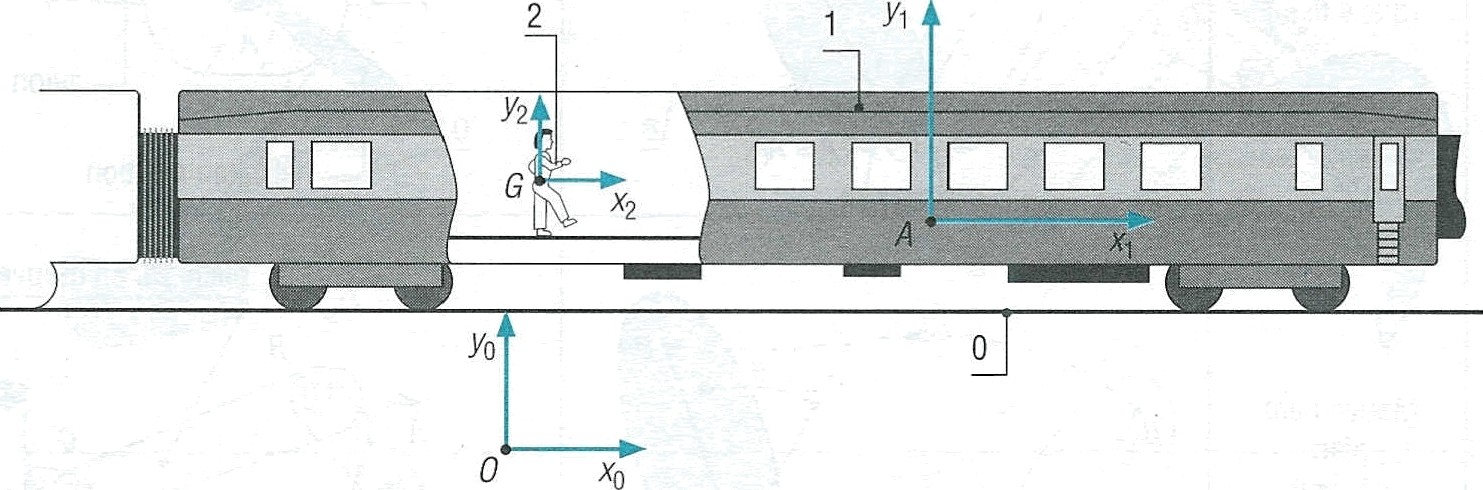
Exemple
Cas d'un voyageur (2) marchant dans un wagon (1) en mouvement par rapport au sol (0).
TRAJECTOIRE D'UN POINT :
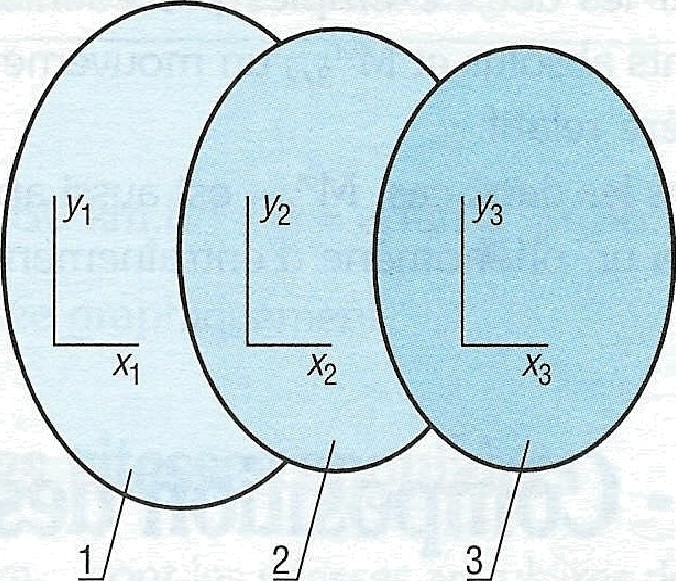
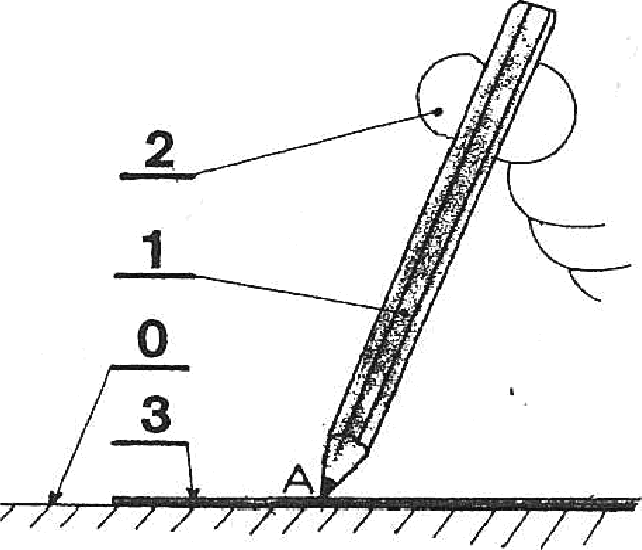 Poin†s coïnciden†s
Poin†s coïnciden†s Considérons (voir figure ci-contre) les solides Si
,S , Sz et S3, ainsi que le point A, extrémité du crayon. A I' ins†an† †, plusieurs poin†s coïnciden†s sont superposés :
A lié à S ,A lié à Sz ,A lié à S3, et A lié à So Selon le point considéré, les mouvements sont différents.
- Trajectoire d'un Doint
La trajectoire d'un point M est la courbe géométrique décrite au cours du temps par les positions successives de ce poin† par rappor† à un repère de référence.
Exemple : roue avant de vélo.
VITESSE ET ACCELERATION
Vecteur - position : ![]() Le solide (S1) est en mouvement par rapport à un 0
Le solide (S1) est en mouvement par rapport à un 0
repère de référence Ré ( O, Xx, Ya).
Il décrit la trajectoire T MI/0. M
La position du point P à I' instant t est défini par le vecteur- position .
X (†)
OM y( )
O
![]()
![]() T M1/0 0
T M1/0 0
Vec†eur - vitesse
La vitesse instantanée d'un point M d'un solide, par rapport à un repere de référence Ro ( O, Xx, Ya ), est définie par le vecteur - vitesse.
'(t)
 FW I /0) y ' (•|•)
FW I /0) y ' (•|•)

![]() direction : tangente en M à la trajectoire
direction : tangente en M à la trajectoire
sens : celui du mouvement
norme : vitesse algébrique v
Si v › 0, M se déplace dans le sens + de la trajectoire. Si v « 0, M se déplace dans le sens - de la trajectoire. Si v = a , le mouvement se fait à vitesse constantes.
VM$i/oJ'
Vecteur - accélération :
L'accélération instantanée d'un point M d'un solide, par rapport à un repère de référence Ré ( O, Xx, Yo ), est définie par le vecteur - accélération.
![]() F M (I /0) ' ' (t) E M (i /0)
F M (I /0) ' ' (t) E M (i /0)
(d VM (d’ OM
dt dt’
Si y (valeur algébrique de l'accélération) est dans le même sens que v, M se déplace en
accélérant.
Si y est dans le sens contraire de v, M se déplace en décélérant.
- MOUVEMENTS PLANS PARTICULIERS
Mouvement
Translation rectiligne
 Ro†a†ion
Ro†a†ion
Mouvement pan
général /’
Exemple
 barre 1
barre 1
coulisseau 2 rn
tfâf1SlôtÏ0fl FüCtlllgflü
bielle B6 en mouvement plan
"C’
![]()
manivelle
 (rotation) piSt/p
(rotation) piSt/p
Nature de la trajectoire
![]() position initiale position finale
position initiale position finale
Cercles concentriques de centre le
A
![]()

translation
![]()
![]() Translation circulaire
Translation circulaire
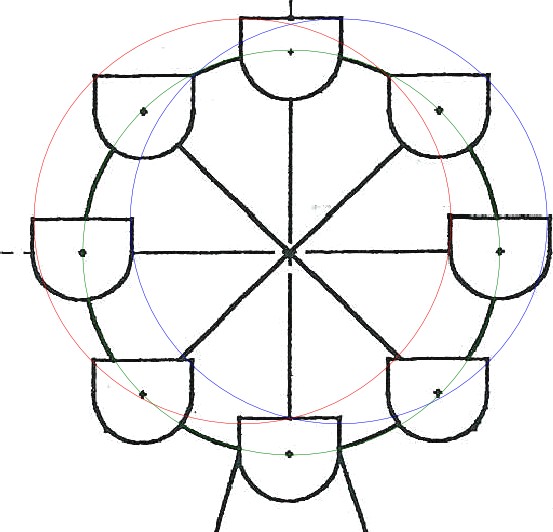
» ‹ . .. , . . identiques (ex : prande roue de Ïoïre)
 en translatÏ0û
en translatÏ0û
![]()
![]()
biellette
üUt0blJS
B- Cinématique du solideUn solide est supposé géométriquement parfait, homogène et non déformable.
- MOUVEMENT DE TRANSLATION RECTILIGNE :
Soit un solide en translation rectiligne :
![]()


Tous les points de ce solide ont des trajectoires parallèles, ce sont des droites.
Leurs vecteurs - vitesse sont identiques, de direction celle du mouvement.
A o B io
Leurs vecteurs - accélération son† identiques,

Vecteur- position:
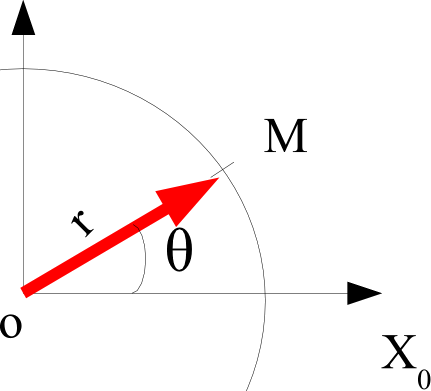 0 Le solide (S1) est en rotation par rapport à un repère de référence Ro ( O, Xx, Ya ). Le point M décrit au cours du temps un cercle de centre O, de rayon r = OM. La position de M est repérée par l'angle 0 qui varie au cours du temps.
0 Le solide (S1) est en rotation par rapport à un repère de référence Ro ( O, Xx, Ya ). Le point M décrit au cours du temps un cercle de centre O, de rayon r = OM. La position de M est repérée par l'angle 0 qui varie au cours du temps.
Les coordonnées du vecteur - position sont :

![]() OM —— r cos Ö) . x ( rsin Ö). y
OM —— r cos Ö) . x ( rsin Ö). y
Vitesse angulaire :
La vitesse angulaire ul, à I' instant t, du point M est égale au rapport de I'angle parcouru par la
durée.
![]()
![]() Uni†é : rad/seconde. '
Uni†é : rad/seconde. '
- Cons†ruc†ion Mécanique - Cinématique page 5
Vec†eur - vitesse
 Le vecteur - vitesse est porté par la tangente en 0
Le vecteur - vitesse est porté par la tangente en 0
M à la trajectoire (perpendiculaire au rayon).
Sa norme est égale au produit du rayon r et de la vitesse angulaire w.
Uni†é : m/s K—— r. œ O
Vecteur - rotation z1
Support : axe de rotation
sens positif sur (Oz )si m » 0
norme : m
![]()
C 1 /0
![]() O M
O M
X0
Répar†i†ion des vitesses
La vitesse d’un point d'un solide est proportionnelle à la distance de ce point à l'axe de rotation. Il en résulte une répartition triangulaire des vitesses.
Il suffi† donc de connaître la vitesse d'un poin† d'un solide en ro†a†ion e† la position de son axe de rotation pour déterminer la vitesse de tous les autres points.
MOUVEMENT PLAN :
Définition
Un solide est dit en mouvement plan lorsque tous les points appartenant à ce solide se déplacent parallèlement à un plan fixe de référence.
Les †rajec†oires des poin†s son† des courbes géométriques planes contenues dans des plans parallèles.
üirlle BP en mouvement plan
 mzr velle
mzr velle
(rotztior) pjstor
trarsIatior
Eauipro iectivité
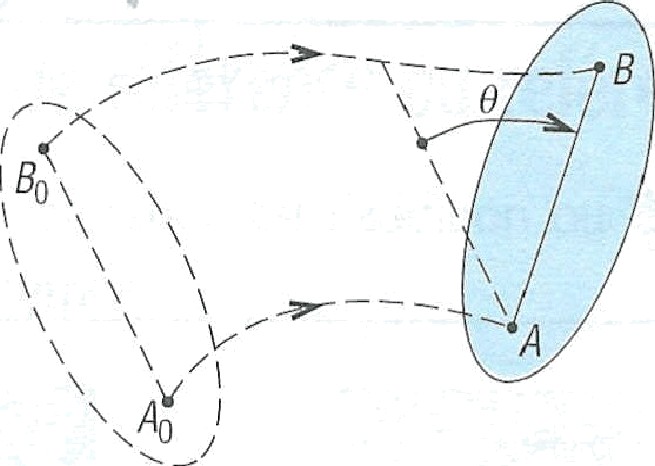
Soit deux points A et B appartenant à un même solide (1) en mouvement plan par rapport à un
repère de référence Ra( O, Xx, Ya).

Construction graphique :

FB(›I0)
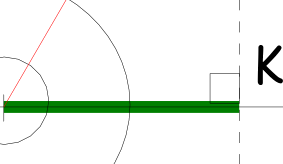 A H B
A H B
%

VA ’0)
Les segments ÂH et BP sont les projections orthogonales respectives des vecteurs vitesse des points A et B sur la droite (AB). Ils sont égaux
On no†era que les poin†s de projection H e† K son† si†ués du meme cote' par rappor† aux points A et B.
Pour connaître toutes les vitesses d'un solide en mouvement plan, il suffit de connaître :
le vecteur-vitesse de l'un des points.
La direction du vecteur vitesse d’un autre point.
- Centre instantané de rotation
Pour tout solide en mouvement plan par rapport à un repère de référence Ra( O, Xx, Ya ), il existe à chaque instant t un point I unique dont la vitesse est nulle.
Ce point est appelé centre instantané de rotation (C.I.R.).


![]() I
I
![]()
A B


Tout se passe comme si le solide était à I'instant t en rotation autour du point 1. On peu† donc utiliser la propriété de répartition triangulaire des vitesses.
![]() I
I
A a
Les segments et sont égaux.
Le segment a est égal à PA(t/0)
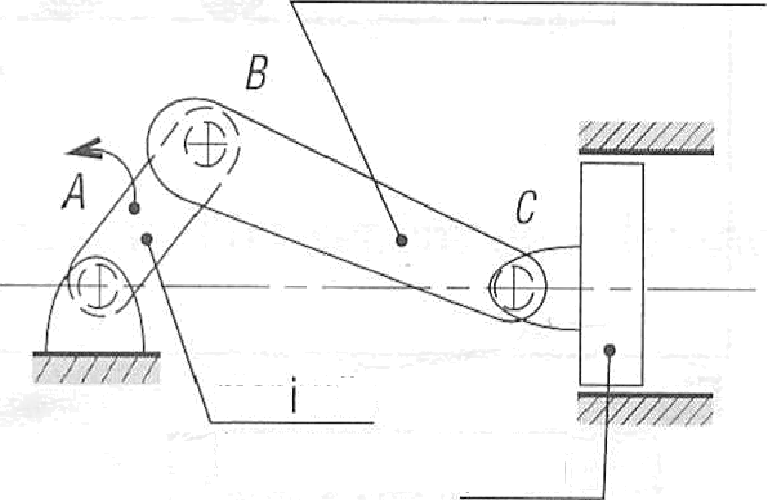
- COMPOSITION DE MOUVEMENT :
 Mouvements relatifs
Mouvements relatifs
Soit un solide (3) en mouvement par rapport à un solide (2), lui-même en mouvement par rapport à un solide (1). Le mouvement du solide (3) par rapport au solide (1) est le composé des deux mouvements précédents
M“ 3/1 M" 3/2 M" 2/1.
Composition des vitesses
Vitesses en un poin†
Soit un point A appartenant au solide (3) . Au point A on peut écrire la relation de composition de vitesses

LA(3/1) A 3g2)+ A 2/l )
vitesse absolue vitesse relative vitesse d’entraînement
Vitesses anoulaires
De même on peut écrire au point A la relation de composition des vitesses angulaires.
Glissement - Roulement - Pivotement :
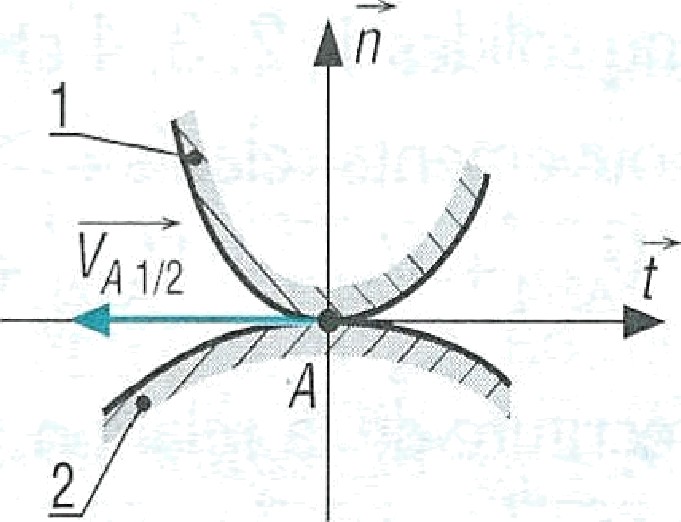 Soit A le point de contact entre le solide (1) et le solide (2). Soit  , n ; t , fi) repère orthonormé direct.
Soit A le point de contact entre le solide (1) et le solide (2). Soit  , n ; t , fi) repère orthonormé direct.
On appelle vitesse de lipssement en A du solide
(1) par rapport au solide (2) le vecteur vitesse relative ÜA( ),) . Ce vecteur est contenu dans le plan mangent au contact.
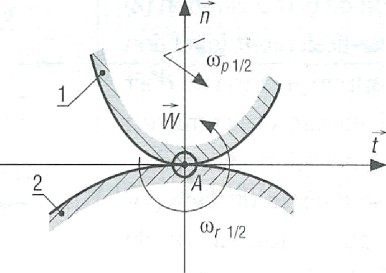
 La vitesse angulaire rt 1 2) est la vitesse de roulement autour de 1
La vitesse angulaire rt 1 2) est la vitesse de roulement autour de 1
La vitesse angulaire p 1t2) est la vitesse de pivotement autour de ñ .
![]()
![]() Dîf{éren†es combinaisons son† possibles :
Dîf{éren†es combinaisons son† possibles :
|
| 2 - 0 | •. 2 - 0 | w z›0 çl/2' 0 | › › 0 | |
| LA | —— 0 | adhérence | pivotement | roulement | roulement avec pivotemenï |
| 7 gt | glissement | glissement avec ÇlVotement | glissement avec oc1ement | glissement avec roulement et givotement | |
Ces différentes combinaisons sont prises en compte lorsque l'on fait des hypothèses simplificatrices Iors d'une étude de mécanique.
Les propriétés et les résultats de ce paragraphe sont applicables à un solide, mais aussi à un point matériel en déplacement selon des mouvements particuliers. Ceci permet une simplification de l’étude.
- MOUVEMENT DE TRANSLATION
 La trajectoire du point M en translation par rapport au repère R ( O, X, Y, Z ) est une droite d'équation : y = z = 0.
La trajectoire du point M en translation par rapport au repère R ( O, X, Y, Z ) est une droite d'équation : y = z = 0.
![]()
![]()
![]()
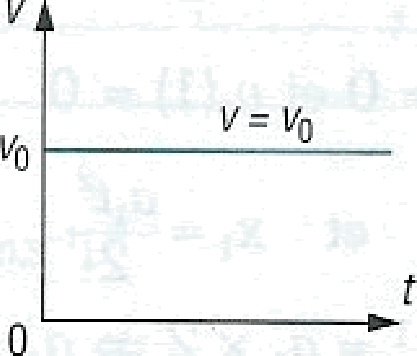
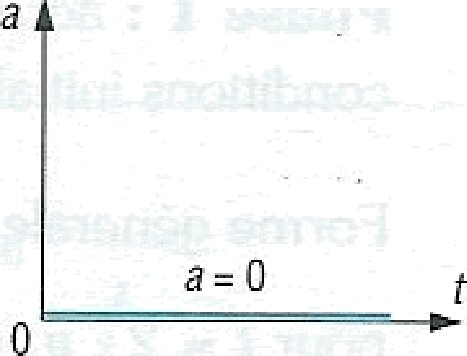
Mouvement de translation uniforme
Le mouvement se fait à vitesse v constante, l'accélération est nulle . Les équations du mouvement sont :
![]() : déplacemen† initial à ==0
: déplacemen† initial à ==0
![]() : vitesse initiale et vitesse du mouvement x : déplacement à I' instant t
: vitesse initiale et vitesse du mouvement x : déplacement à I' instant t
Représentation qraphique
v= v0
= constante
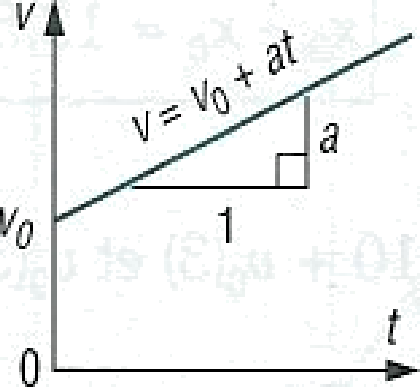
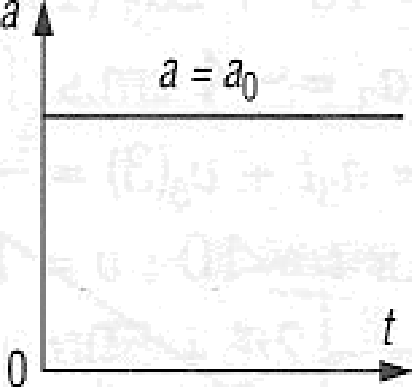
 2.
2.
Le mouvement se fait à accélération constante. Les équations du mouvement sont :
![]() conditions initiales
conditions initiales
![]()

1
![]() 2
2
Formule utile
Représentation graphique
Il. MOUVEMENT DE ROTATION
La trajectoire du point P en rotation par rapport qu repere Ro (0 ,’ x; y” ,' ?) est un cercle contenu dans le plan (0 , x , y , de centre O et de rayon (OP).
 On utilise les coordonnées polaires (r 0 ) dans le
On utilise les coordonnées polaires (r 0 ) dans le
repère R1 (P; n; t ,' )
Vec†eur position
ÖP—— rn —— rcos 8 sûr sin8 y
Vitesse anqulaire
![]()

unité : rad/s
Vecteur-rotation
![]()
Vec†eur — vitesse

![]() d OP dt
d OP dt
Vecteur — accélération
Accélération angulaire

uni†é : rad/s*
L'accélération du point P a une composante normale n et une composante tangentielle

ovec ri — m 2 . r ——r — W . V e† l — Ü . r —(t) . r
1. Mouvement de rotation uniforme
L’accéIéF'Qtion angulaire est nulle, la vitesse angulaire est constQnte.
Les équations du mouvemen† son† :
Où : déplacemen† angulaire initial à /=0
w0'Q : vitesse angulaire initiale et vitesse angulaire du mouvement
8 : déplacement à I' instant t
![]()
••= 0 =°0 =constante
![]()

Puisque ' ' 0 , alors '0 . Donc (1/0)'î •)
BTS C.I.M. - Cons†ruc†ion Mécanique - Cinématique page 12
 Le vecteur-accélération n'es† pas nul.
Le vecteur-accélération n'es† pas nul.
Il est porté par la normale et dirigé vers le centre.
 2.
2.
L'accélération angulaire 1 est constante. Les équations du mouvement sont
Conditions initiales .
![]()
Formule utile
Mouvemen† accélère
— ‘0 — = constante
![]()
1
![]()
![]() 2
2

 Le vecteur vitesse %( ) et la composante tangentielle / sont dans le même sens.
Le vecteur vitesse %( ) et la composante tangentielle / sont dans le même sens.
La composante normale n est toujours dirigée vers
le cen†re.
 L'accélération angulaire cf est dans le meme sens que la vitesse angulaire m
L'accélération angulaire cf est dans le meme sens que la vitesse angulaire m
Mouvement deccéleré

![]()
Le vecteur vitesse %‹ ) et la composante tangentielle t sont en sens opposé.
La composante normale n est toujours dirigée vers le cen†re.
L'accélération angulaire 1 est dans le sens contraire de la vitesse angulaire
- Cons†ruc†ion Mécanique - Cinématique page 13








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

