
Россия, Нижний Новгород


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 27.11.2025 02:37

Чернобай Любовь Сергеевна
Преподаватель математики (все направления) и преподаватель электрических дисциплин направления 13.02.13 (МДК 01.01 Электрические машины и аппараты, МДК 01.04 Техническое регулирование и контроль качества электрического и электромеханического оборудования)
Местоположение
Специализация
Лекции на тему: "Асинхронные машины"
Категория:
Прочее
18.11.2025 06:20

Просмотр содержимого документа
«Лекции на тему: "Асинхронные машины"»
1 Общие вопросы бесколлекторных машин переменного тока
Бесколлекторные машины переменного тока – это электромеханические устройства, которые используются для преобразования электрической энергии в механическую. Эти машины широко применяются в различных отраслях промышленности благодаря своей эффективности и высокой производительности.
Одна из главных особенностей бесколлекторных машин заключается в отсутствии коллектора и щеток, что устраняет трение и износов каждой машины. Вместо этого используются электронные коммутаторы, которые управляют положением и направлением потока электрического тока. Это позволяет достичь более стабильной работы и повысить эффективность энергопотребления.
Одним из главных преимуществ таких машин является их высокий КПД. Бесколлекторные машины способны преобразовывать значительную часть потребляемой электрической энергии в механическую работу, что позволяет сэкономить на энергозатратах и повысить производительность системы в целом.
Бесколлекторные машины переменного тока особенно полезны в технике преобразования энергии, так как они обладают высокой надежностью и долговечностью при минимальном обслуживании. Это делает их незаменимыми в таких отраслях, как автомобилестроение, промышленное производство и энергетика.
2 Устройство бесколлекторных асинхронных машинАсинхронная машина – это бесколлекторная машина переменного тока, у которой при работе возбуждается вращающееся магнитное поле, но ротор вращается асинхронно, т.е. с угловой скоростью, отличной от угловой скорости поля.
Асинхронные машины могут работать в режиме генератора. Но как источники электрической энергии они почти не применяются, так как не имеют собственного источника возбуждения магнитного потока и по своим показателям уступают синхронным генераторам.
Асинхронные машины применяют в качестве регуляторов напряжения, фазорегуляторов, преобразователей частоты и др.
Недостатками асинхронных машин являются сложность и неэкономичность регулирования их эксплуатационных характеристик.
Асинхронный двигатель состоит из статора, ротора и подшипниковых щитов. Статор – неподвижная часть двигателя – имеет цилиндрическую форму. Он состоит из корпуса, сердечника и обмотки. Корпус литой стальной или чугунный. Магнитопровод статора собирается из тонких листов электротехнической стали. На внутренней поверхности он имеет пазы, в которые укладывается обмотка статора. Ротор асинхронного двигателя – вращающаяся часть – состоит из стального вала, магнитопровода, набранного из листов электротехнической стали с выштампованными пазами. Обмотка ротора бывает короткозамкнутой или фазной. Короткозамкнутая обмотка выполняется из алюминиевых или медных стержней, замкнутых накоротко с обоих торцов ротора. Фазный ротор имеет трехфазную обмотку, соединенную в звезду. Выводы обмотки подсоединены к кольцам на валу и с помощью щеток подсоединяются к реостату или другому устройству.
Вращающийся ротор размещают на общем валу cо статором. Вал вращается в подшипниковых щитах. Соединение обмотки статора осуществляется в коробке, в которую выведены начала фаз С1, С2, С3и концы фаз С4, С5, С6. Ниже (рис.1) показаны схемы расположения этих выводов (а) и способы соединения их между собой при соединении фазных обмоток звездой (б) и треугольником (в).
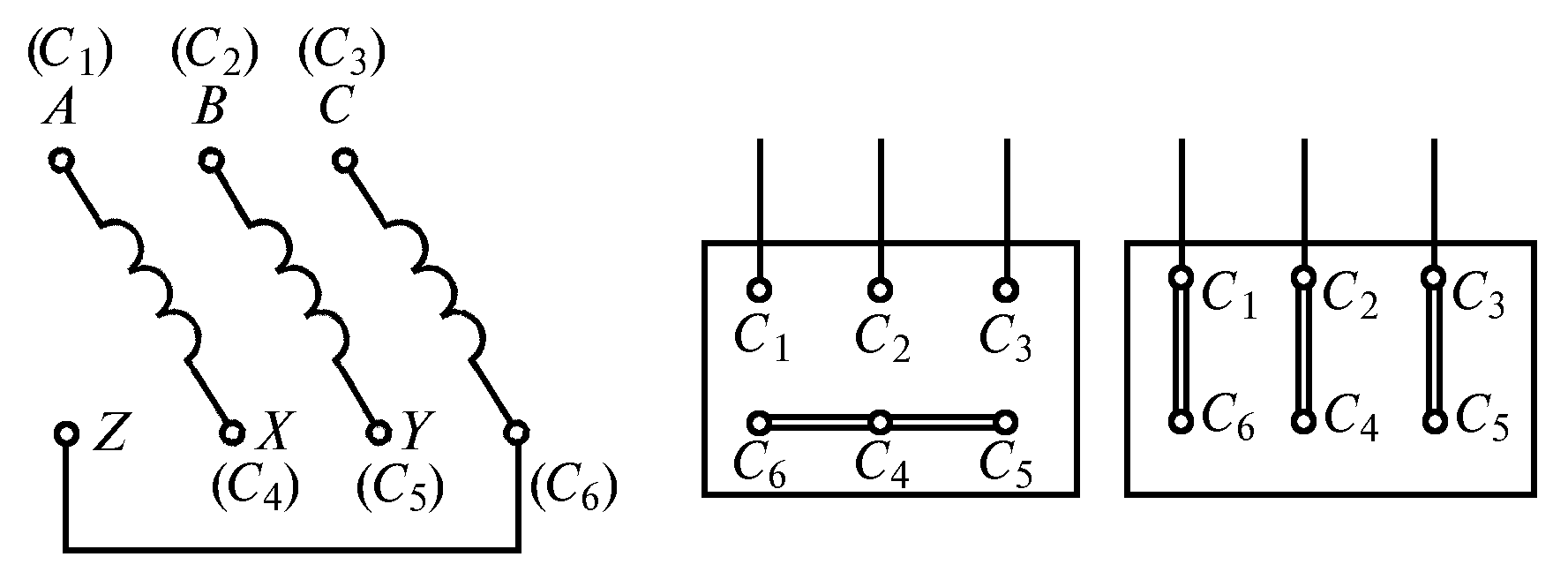
Рисунок 1 – Схемы соединения обмотки статора
Если в паспорте двигателя указаны два напряжения, например, 380/220, то большему напряжению соответствует соединение звездой, более меньшему – треугольником. В обоих случаях напряжение на фазе двигателя равно 220 В.
Электромагнитное взаимодействие между статором и ротором возникает только при неравенстве скорости поля статора и скорости вращения ротора.
Асинхронные двигатели являются самыми распространенными из всех двигателей. Их преимущества состоят в простоте устройства, большой надежности и сравнительно низкой стоимости.
3 Режимы работы бесколлекторных машин переменного токаУ бесколлекторных машин переменного тока присутствует 3 режима работы:
Двигательный режим
Генераторный режим
Режим торможения
Двигательный режим. При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи. В результате взаимодействия этих токов с вращающимся магнитным полем на роторе возникают электромагнитные силы. Совокупность этих сил создает электромагнитный вращающий момент, под действием которого ротор асинхронного двигателя приходит во вращение с частотой n2 n1 в сторону вращения поля статора. Если вал асинхронного двигателя механически соединить с валом какого-либо исполнительного механизма ИМ (станка, подъемного крана и т. п.), то вращающий момент двигателя М, преодолев противодействующий (нагрузочный) момент Мнагр, исполнительного механизма, приведет механизм во вращение. Следовательно, электрическая мощность Р1, поступающая в двигатель из сети, в основной своей части преобразуется в механическую мощность Р1 и передается исполнительному механизму ИМ. Весьма важным параметром асинхронной машины является скольжение — величина, характеризующая разность частот вращения ротора и вращающегося поля статора:
Скольжение выражают в долях единицы либо в процентах.
В режиме работы двигателя без нагрузки на валу (режим холостого хода) ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n1 и скольжение весьма мало отличается от нуля (S ≈ 0). Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением Sном. Для асинхронных двигателей общего назначения Sном = 1 8%, при этом для двигателей большой мощности Sном = 1%, а для двигателей малой мощности Sном = 8%.
Генераторный режим. Если обмотку статора включить в сеть, а ротор асинхронной машины посредством приводного двигателя ПД (двигатель внутреннего сгорания, турбина и т. п.), являющегося источником механической энергии, вращать в направлении вращения магнитного поля статора с частотой n2 n1, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом работы пой машины), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора, изменит свое направление. Электромагнитный момент на роторе М также изменит свое направление, т. е. будет направлен встречно вращающемуся магнитному полю статора и станет тормозящим по отношению к вращающемуся моменту приводного двигателя М1 (рис. 2, а).
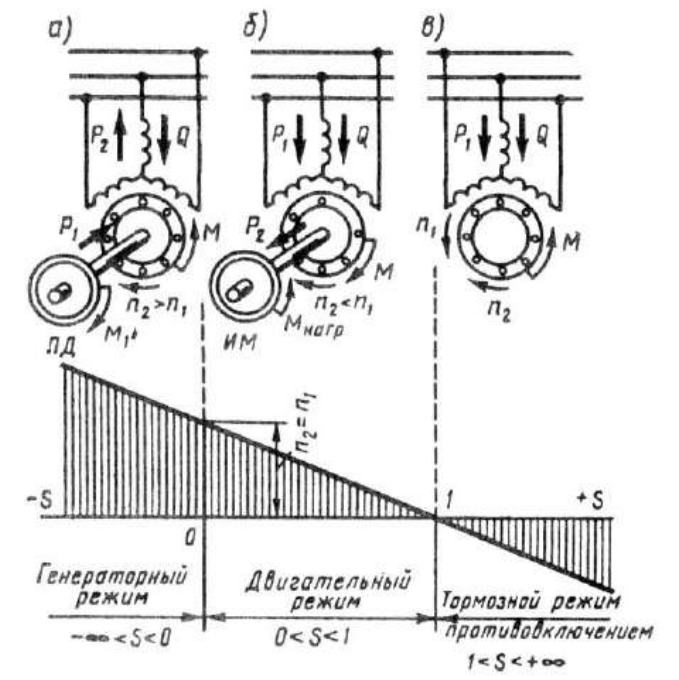
Рисунок 2 – Режимы работы асинхронной машины
В этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную мощность Р2 переменного тока. Особенность работы асинхронного генератора состоит в том, что вращающееся магнитное поле в нем создается реактивной мощностью Q трехфазной сети, в которую включен генератор и да он отдает вырабатываемую активную мощность Р2. Следовательно, для работы асинхронного генератора необходим источник переменного тока, при подключении к которому происходит возбуждение генератора, т. е. в нем возбуждается вращающееся магнитное поле. Скольжение асинхронной машины в генераторном режиме может изменяться в диапазоне - ∞ S
Режим торможения противовключением. Если у работающего трехфазного асинхронного двигателя поменять местами любую пару подходящих к статору из сети присоединительных проводов, то вращающееся поле статора изменит направление вращения на обратное. При этом ротор асинхронной машины под действием сил инерции будет продолжать вращение в прежнем правлении. Другими словами, ротор и поле статора асинхронной машины будут вращаться в противоположных направлениях. В этих условиях электромагнитный момент машины, направленный в сторону вращения поля статора, будет оказывать на ротор тормозящее действие. Этот режим работы асинхронной машины называется электромагнитным торможением противовключением. Активная мощность, поступающая из сети в машину при этом режиме, частично затрачивается на компенсацию механической мощности вращающегося ротора, т. е. на его торможение. Скольжение асинхронной машины в режиме торможения противовключением может изменяться в диапазоне 1 S
4 Рабочие характеристикиРабочие характеристики асинхронного двигателя (рис. 3) представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const, f1 = const.
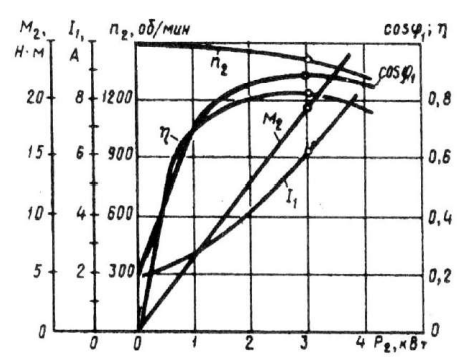
Рисунок 3 – Рабочие характеристики асинхронного двигателя
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя
n2 = n1(1 - S).
S = Pэ2/ Pэм,
т. е. скольжение двигателя, а, следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности РЭМ. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому S ≈ 0 и n2 ≈ n1. По мере увеличения нагрузки на валу двигателя отношение S растет, достигая значений 0,01—0,08 при номинальной нагрузке.
Зависимость М2 =f(P2). Зависимость полезного момента на валу двигателя М2 от полезной мощности Р2 определяется выражением
M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2
где Р2 — полезная мощность, Вт; ω2 = 2πf2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а, следовательно, график М2 =f (P2) имеет криволинейный вид. Зависимость cos φ1 = f (P2). В связи с тем, что ток статора I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора I1 , относительно напряжения U 1 , получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 4).
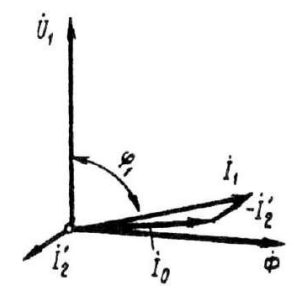
Рисунок 4 – Векторная диаграмма асинхронного двигателя при небольшой нагрузке
Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 – 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2S) за счет увеличения скольжения, а, следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в √3 раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в √3 раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 5 представлены графики зависимости cos φ1, асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
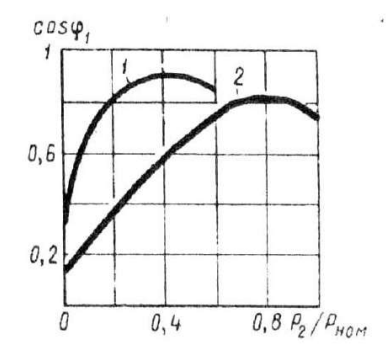
Рисунок 5 – Зависимость cos φ1 от нагрузки при соединении обмотки статора звездой (1) и треугольником (2)
5 Пускорегулирование скорости асинхронных машин 5.1 Пусковые свойства двигателейПуск асинхронного двигателя сопровождается переходным процессом, обусловленным переходом ротора и механически связанных с ним частей исполнительного механизма из состояния покоя в состояние равномерного вращения, когда вращающий момент двигателя уравновешивается суммой противодействующих моментов, действующих на ротор двигателя. Пусковые свойства двигателя определяются в первую очередь значением пускового тока Iп или его кратностью Iп/ Iном и значением пускового момента Мп или его кратностью Мп/Мном. Двигатель, обладающий хорошими пусковыми свойствами, развивает значительный пусковой момент при сравнительно небольшом пусковом токе. Однако получение такого сочетания пусковых параметров в асинхронном двигателе сопряжено с определенными трудностями, а иногда оказывается невозможным. В начальный момент пуска скольжение S = 1, поэтому, пренебрегая током х.х., пусковой ток можно определить из


Помимо пусковых значений тока Iп и момента Мп пусковые свойства двигателей оцениваются еще и такими показателями: продолжительность и плавность пуска, сложность пусковой операции, ее экономичность.
5.2 Регулирование частоты вращения асинхронных двигателейЧастота вращения ротора асинхронного двигателя
n2 = n1(1 - S) = (f160/p)⸱(l - S)
Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой - либо из трех величин: скольжения S, частоты тока в обмотке статора f1 или числа полюсов в обмотке статора 2р. Регулирование частоты вращения изменением скольжения S возможно тремя способами: изменением подводимого к обмотке статора напряжения, нарушением симметрии этого напряжения и изменением активного сопротивления обмотки ротора. Регулировка частоты вращения изменением скольжения происходит только в нагруженном двигателе. В режиме холостого хода скольжение, а следовательно, и частота вращения остаются практически неизменными. Регулирование частоты вращения изменением подводимого напряжения. Возможность этого способа регулирования подтверждается графиками М = f(S), построенными для разных значений U1. При неизменной нагрузке на валу двигателя увеличение подводимого к двигателю напряжения вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя, ограниченным значением критического скольжения и недопустимостью значительного превышения номинального значения напряжения. Последнее объясняется тем, что с превышением номинального напряжения возникает опасность чрезмерного перегрева двигателя, вызванного резким увеличением электрических и магнитных потерь. В то же время с уменьшением напряжения U1 двигатель утрачивает перегрузочную способность, которая, как известно, пропорциональна квадрату напряжения сети. Подводимое к двигателю напряжение изменяют либо регулировочным автотрансформатором, либо реакторами, включаемыми в разрыв линейных проводов. Узкий диапазон регулирования и неэкономичность (необходимость в дополнительных устройствах) ограничивают область применения этого способа регулирования частоты вращения. Регулирование частоты вращения нарушением симметрии подводимого напряжения. При нарушении симметрии подводимой к двигателю трехфазной системы напряжения вращающееся поле статора становится эллиптическим. При этом поле приобретает обратную составляющую (встречное поле), которая создает момент Мобр, направленный встречно вращающему моменту Мпр. В итоге результирующий электромагнитный момент двигателя уменьшается (М = Мпр - Мобр). Механические характеристики двигателя при этом способе регулирования располагаются в зоне между характеристикой при симметричном напряжении (рис. 2.10, а, кривая 1) и характеристикой при однофазном питании двигателя (кривая 2) — пределом несимметрии трехфазного напряжения. Для регулировки несимметрии подводимого напряжения можно в цепь одной из фаз включить однофазный регулировочный автотрансформатор (AT) (рис. 2.10, б).
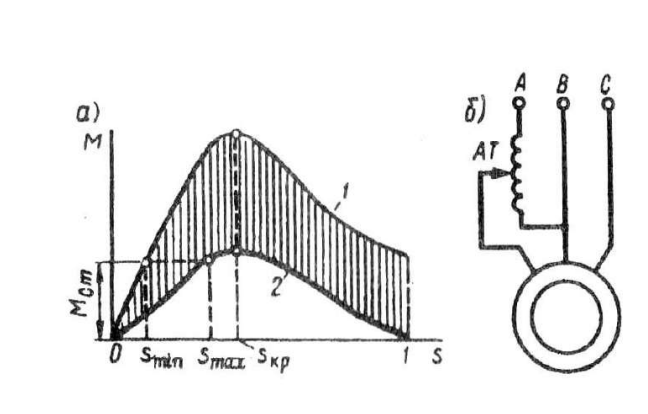
Рисунок 6 – Механические характеристики (а) и схема включения (б) асинхронного двигателя при регулировании частоты вращения изменением симметрии трехфазной системы
Практически изменение активного сопротивления цепи ротора достигается включением в цепь ротора регулировочного реостата (РР), подобного пусковому реостату (ПР) но рассчитанного на длительный режим работы. Электрические потери в роторе пропорциональны скольжению (Рэ2 = SPэм), поэтому уменьшение частоты вращения (увеличение скольжения) сопровождается ростом электрических потерь в цепи ротора и снижением КПД двигателя. Так, если при неизменном нагрузочном моменте на валу двигателя увеличить скольжение от 0,02 до 0,5, что соответствует уменьшению частоты вращения примерно вдвое, то потери в цепи ротора составят почти половину электромагнитной мощности двигателя. Это свидетельствует о неэкономичности рассматриваемого способа регулирования. К тому же необходимо иметь в виду, что рост потерь в роторе сопровождается ухудшением условий вентиляции из-за снижения частоты вращения, что приводит к перегреву двигателя. Рассматриваемый способ регулирования имеет еще и тот недостаток, что участок механической характеристики, соответствующий устойчивой работе двигателя, при введении в цепь ротора добавочного сопротивления становится более пологим и колебания нагрузочного момента на валу двигателя сопровождаются значительными изменениями частоты вращения ротора. Это иллюстрирует рис. 6, на котором видно, что если нагрузочный момент двигателя изменится на ΔМст = М1ст – М2ст, то изменение частоты вращения при выведенном регулировочном реостате (rд' = 0) составит Δn2I, а при введенном реостате – Δn2II. В последнем случае изменение частоты вращения значительно больше.
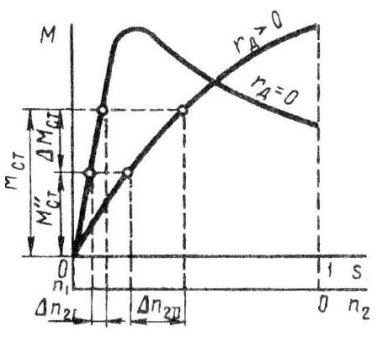
Рисунок 7 - Влияние сопротивления цепи ротора на колебания частоты вращения при изменении нагрузки
Но несмотря на указанные недостатки, рассмотренный способ регулирования частоты вращения широко применяется в асинхронных двигателях с фазным ротором. В зависимости от конструкции регулировочного реостата этот способ регулирования частоты вращения может быть плавным (при плавном изменении сопротивления РР) или ступенчатым (при ступенчатом изменении сопротивления РР). Способ обеспечивает регулирование частоты вращения в широком диапазоне, но только вниз от синхронной частоты вращения. Вместе с тем он обеспечивает двигателю улучшенные пусковые свойства.
5.3 Регулирование частоты вращения изменением частоты тока в статоре.Этот способ регулирования (частотное регулирование) основан на изменении синхронной частоты вращения n1 = f1 60/ р. Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой. В качестве таких источников могут применяться электромашинные, ионные или полупроводниковые преобразователи частоты (ПЧ). Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1. Но с изменением частоты f1 = ω1p/(2π) будет изменяться и максимальный момент. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и напряжение питания U1. Характер одновременного изменения f1 и U1 зависит от закона изменения момента нагрузки и определяется уравнением

где U1 и М — напряжение и момент при частоте f1; U2 и М2 – напряжение и момент при частоте f 2.
Если частота вращения двигателя регулируется при условии постоянства момента нагрузки (М = М2 = const), то подводимое к двигателю напряжение необходимо изменять пропорционально изменению частоты тока. При этом мощность двигателя увеличивается пропорционально нарастанию частоты вращения. Если же регулирование производится при условии постоянства мощности двигателя (Рэм = Мω1 = const), то подводимое напряжение следует изменять в соответствии с законом

Частотное регулирование двигателей позволяет плавно изменять частоту вращения в широком диапазоне. Однако источники питания с регулируемой частотой тока удорожают установку. Поэтому частотное регулирование до последнего времени применялось в основном для одновременного регулирования группы двигателей, работающих в одинаковых условиях (например, рольганговых двигателей).
5.4 Регулирование частоты вращения изменением числа полюсов обмотки статора.Этот способ регулирования частоты вращения дает ступенчатую регулировку. Так, при f1 =50 Гц и р = 1÷5 пар полюсов можно получить следующие синхронные частоты вращения: 3000, 1500, 1000, 750, 600 об/мин. Изменять число полюсов в обмотке статора можно либо укладкой на статоре двух обмоток с разным числом полюсов, либо укладкой на статоре одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Последний способ получил наибольшее применение. Принцип преобразования четырехполюсной обмотки в двухполюсную (для одной фазы) показан на рис. 8: при последовательном согласном соединении двух катушек возбуждаемое ими магнитное поле образует четыре полюса (рис. 8 а); при последовательном встречном (рис. 8, б) или параллельном соединениях (рис. 8, в) — два полюса.
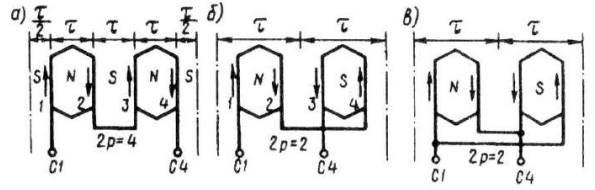
Рисунок 8 – Схемы включения обмотки статора на разное число полюсов
Таким образом, принцип образования полюсно переключаемой обмотки основан на том, что каждая фаза обмотки делится на части (катушечные группы), изменяя схему соединения которых получают разное число полюсов.
Возможны два режима работы асинхронных двигателей с полюсно переключаемыми обмотками: режим постоянного момента (рис. 9, а) — при переключении двигателя с одной частоты вращения на другую вращающий момент на валу двигателя М2 остается неизменным, а мощность Р2 изменяется пропорционально частоте вращения n2:

режим постоянной мощности (рис. 9, б) — при переключении двигателя с одной частоты вращения на другую мощность P2 остается примерно одинаковой, а момент на валу M2 изменяется соответственно изменению частоты вращения n2:

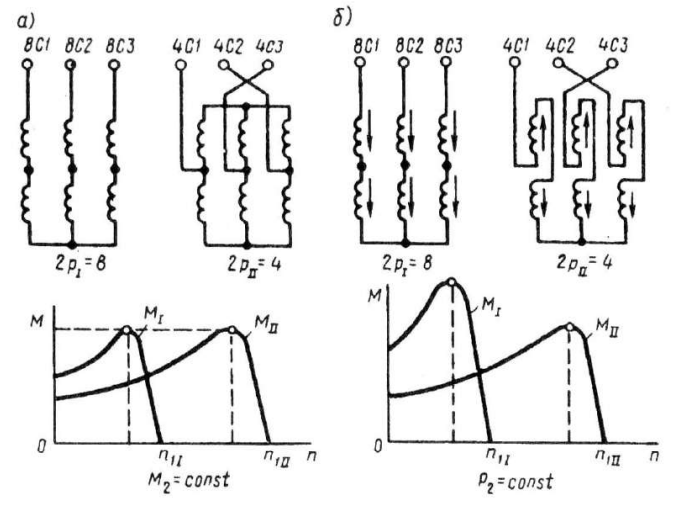
Рисунок 9 – Схемы переключения числа полюсов и механические характеристики в режимах постоянного момента (а) и постоянной скорости (б)
Если на статоре расположить две полюсно переключаемые обмотки, то получим четырехскоростной двигатель. Однако возможно применение и одной обмотки, допускающей путем переключения катушечных групп получение до четырех вариантов различных чисел полюсов. Например, асинхронный двигатель типа 4А180М12/8/6/4 имеет на статоре обмотку, допускающую переключение на 12,8,6,4 полюса. Регулирование частоты вращения изменением числа полюсов на статоре применяют исключительно в асинхронных двигателях с короткозамкнутым ротором, так как число полюсов в обмотке этого ротора всегда равно числу полюсов статора и для изменения частоты вращения достаточно изменить число полюсов в обмотке ротора. В случае же фазного ротора пришлось бы и на роторе применить полюсно переключаемую обмотку, что привело бы к недопустимому усложнению двигателя.
6 Асинхронные машины специального назначенияИндукционный регулятор напряжения (ИР) представляет собой асинхронную машину с фазным ротором, предназначенную для плавного регулирования напряжения. Ротор ИР заторможен посредством червячной передачи, которая не только удерживает его в заданном положении, но и позволяет плавно поворачивать его относительно статора. Обмотки статора и ротора в ИР имеют автотрансформаторную связь (рис. 10, а), поэтому ИР иногда называют поворотным автотрансформатором.
Фазорегулятор (ФР). Предназначен для изменения фазы вторичного напряжения относительно первичного при неизменном вторичном напряжении. В отличие от ИР обмотки ротора и статора ФР электрически не соединены друг с другом, т. е. имеют трансформаторную связь (рис. 10, б), поэтому ФР иногда называют поворотным трансформатором.
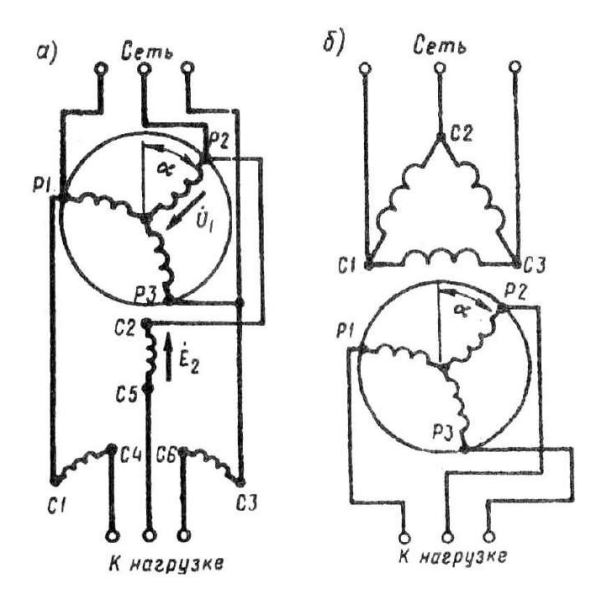
Рисунок 10 – Схемы соединения индукционного регулятора напряжения (а) и фазорегулятора (б)
Асинхронный преобразователь частот. Как известно, частота тока в роторе асинхронной машины зависит от скольжения (f2 = sf1). Это свойстве асинхронных машин и. пользуется в асинхронных преобразователях частоты (АПЧ). Обмотку статора АПЧ подключают к трехфазной сети с частотой f1, а ротор приводят во вращение приводным двигателем (ПД) в направлении против вращения поля статора (рис. 11).
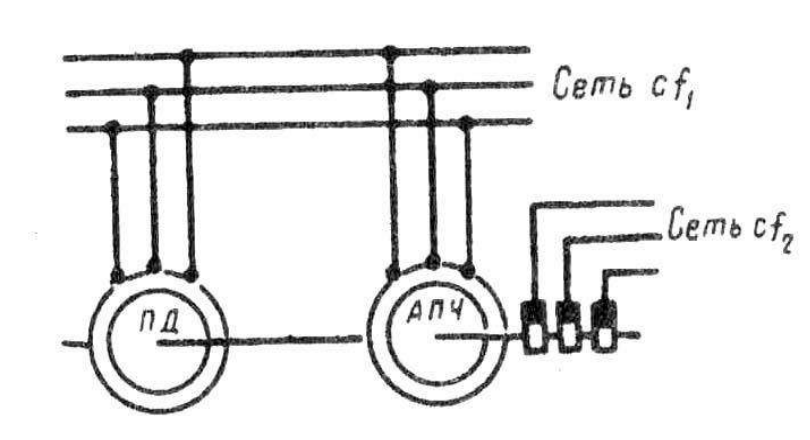
Рисунок 11 - Схема включения асинхронного преобразователя частоты
Мощность на выходе АПЧ складывается из электромагнитной мощности Рэм, передаваемой в обмотку ротора вращающимся полем статора, и механической мощности приводного двигателя Рпд, т. е. Р2 = Рэм + Рпд. Соотношение между мощностями Рэм и Рпд зависит от скольжения.
В современной технике часто возникает необходимость в синхронизации вращения или поворота осей механизмов. Эта задача успешно решается с помощью системы синхронной связи.
Синхронной связью называют электрическую связь, которая обеспечивает одновременное вращение или одновременный поворот двух (или более) находящихся на расстоянии друг от друга и механически не связанных валов. Распространены два вида систем синхронной связи: система «электрического вала» (синхронного вращения) и система «передачи угла» (синхронного поворота).
Системы электрического вала применяют для синхронного (одновременного) вращения нескольких механизмов, имеющих значительные нагрузочные моменты на валу. Для привода таких механизмов применяют обычные асинхронные двигатели с фазным ротором. При этом обмотки роторов электрически соединяй и друг с другом, а обмотки статоров включают в общую сеть трех фазного тока.
Системы передачи угла (синхронного поворота) применяют для дистанционного управления или контроля положения в пространстве каких-либо устройств. Обычно такая система выполняется на небольших асинхронных машинах (однофазных или трехфазных), называемых сельсинами.
Наибольшее применение получили однофазные сельсины. Такой сельсин имеет однофазную обмотку возбуждения и трехфазную обмотку синхронизации, соединенную звездой. Одна из обмоток располагается на роторе, а другая — на статоре.
Простейшая синхронная передача, называемая индикаторной, содержит два сельсина: сельсин-датчик (СД) и сельсин-приемник (СП) (рис. 12)
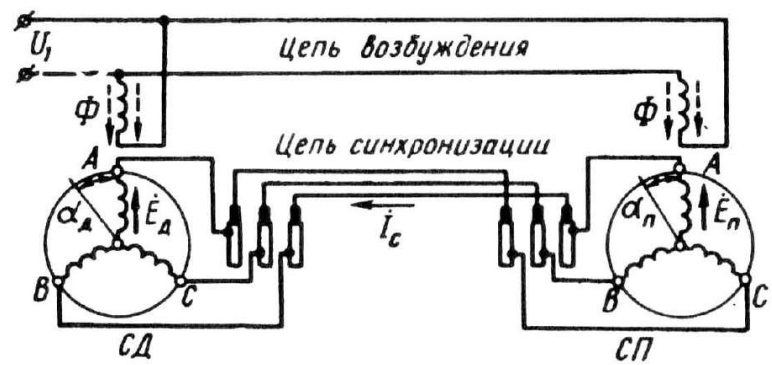
Рисунок 12 – Схема синхронной передачи
В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования - отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).
На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка. Одна из фазных обмоток — обмотка возбуждения (ОВ) - постоянно включена в сеть с напряжением U1, а на другую - обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при необходимости включения двигателя (рис. 13).
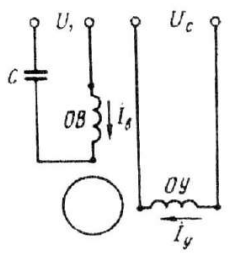
Рисунок 13 – Схема включения асинхронного исполнительного двигателя
Линейные асинхронные двигатели. Подвижная часть линейного двигателя совершает поступательное движение, поэтому применение этих двигателей для привода рабочих машин с поступательным движением рабочего органа позволяет упростить кинематику механизмов, уменьшим потери в передачах и повысить надежность механизма в целом.
Возможны линейные двигатели четырех видов: электромагнитные (соленоидные), магнитоэлектрические (с применением постоянного магнита), электродинамические и асинхронных. Асинхронные (индукционные) линейные двигатели благодаря простоте конструкции и высокой надежности получили наибольшее применение.
Для объяснения принципа работы линейного асинхронного двигателя обратимся к асинхронному двигателю с вращательным движением ротора. Если статор этого двигателя (рис. 14, а) мысленно «разрезать» и «развернуть» так, чтобы он образовал дугу с углом α (рис. 14, б), то диаметр ротора увеличится. При этом мы получим асинхронный двигатель с дуговым статором.
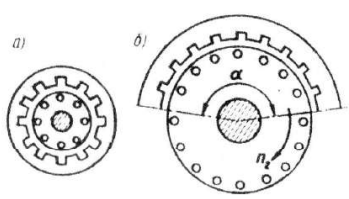
Рисунок 14 – К понятиям о дуговом и линейном двигателях
7 Потери и КПД асинхронного двигателяПреобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) Р1 на величину потерь Р:
Потери Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рм в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β , где β = 1,3 ÷ 1,5.
Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f2 = f1s. При частоте тока в сети f1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт): электрические потери в обмотке статора

электрические потери в обмотке ротора

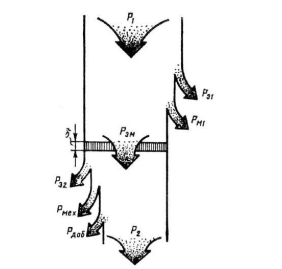
На рисунке 15 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 = m1U1I1cosφ1 затрачивается в статоре на магнитные Рэм и электрические Рэ1 потери. Оставшаяся после этого электромагнитная мощность Рэм передается на ротор, где частично расходуется на электрические потери Рэ2 и преобразуется в полную механическую мощность Р2. Часть мощности идет на покрытие механических Рмех и добавочных потерь Рдоб, а оставшаяся часть этой мощности Р2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД:
 η = Р2/ Р1 =1 - P
η = Р2/ Р1 =1 - P
Рисунок 15 – Энергетическая диаграмма асинхронного двигателя
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном = 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном =90 ÷ 94%.
3








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

