
Россия, Каменск-Шахтинский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 17.05.2026 19:51

Барышев Евгений Валентинович
педагог дополнительного образования
61 год
Местоположение
Специализация
Модель робота для соревнований в классе «Траектория - Пазл»
Категория:
Прочее
15.11.2021 15:36

Просмотр содержимого документа
«Модель робота для соревнований в классе «Траектория - Пазл»»
муниципальное бюджетное учреждение
дополнительного образования «Станция юных техников»
города Каменск-Шахтинский
Принята на методическом совете
Протокол №______ от «___» _________ 20___г
(Для учащихся 1 года обучения робототехнических объединений учреждений дополнительного образования)
Автор: Барышев Е. В.
педагог дополнительного образования.
2021
СОДЕРЖАНИЕ
| Пояснительная записка | 3 | |
| 1. | Оснавная часть | 5 |
| Материалы и инструменты | 6 | |
| Механическая начинка модели | 6 | |
| | Электронная начинка модели | 8 |
| 2. | Заключение | 11 |
| 3 | Источники информации | 12 |
| 4 | Приложение | 13 |
Пояснительная записка
Данная методическая разработка предназначена для самостоятельного изготовления учащимися 1 года обучения простой модели робота для соревнований в классе «Траектория-Пазл» [3, 124]. В этом соревновании участникам необходимо подготовить и настроить автономного робота, способного проехать, следуя черной линии, от зоны старта до зоны финиша по траектории, составленной из типовых элементов (пазлы), преодолевая препятствия за наиболее короткое время. Более подробно с регламентом соревнований «Траектория-Пазл» можно ознакомиться на сайте http://myrobot.ru.
Методическая разработка является приложением к образовательной программе «Робототехника» и направлена на достижение следующих целей и задач:
Образовательные:
научить основным принципам построения композиции при создании графических изображений;
ознакомить учащихся с регламентом соревнований мобильных мини роботов;
создание трехмерной модели объекта при помощи специальных компьютерных программ.
Развивающие:
развитие интереса и склонностей в области спортивной робототехнике;
способствовать развитию креативности, нестандартного мышления и пространственного воображения;
способствовать развитию творческих способностей, фантазии и эстетического вкуса.
Воспитывающие:
воспитание всестороннего интереса к технике, творческого отношения к труду, аккуратности при изготовлении моделей;
воспитание чувства взаимоуважения между кружковцами.
Методическая разработка рассчитана на учащихся 12 – 13 лет. На изготовление модели робота отведено 6 занятий по 4 часа.
Для освоения специальной терминологией и изучения различных моделей поведения и применения ВЕАМ методов в спортивной робототехнике предлагается следующая методика изучения:
• самостоятельное изготовление электронных блоков управления;
• самостоятельная сборка механики робота по чертежам;
• самостоятельная сборка и настройка робота по инструкции;
• провести испытания робота и анализ полученных результатов.
Сохраняя общую направленность материала, определяемую предлагаемой методической разработкой, преподаватель, должен иметь свой авторский демонстрационный материал (наглядное пособие, фото и видео материал соревнований). Учащийся может использовать данную методическую разработку как шаблон, для написания своей научно - исследовательской работы.
ОСНОВНАЯ ЧАСТЬ
Данная модель робота соответствует категории «Мини». Размер модели робота не превышает 150х150х70мм. Вес не более 300г [5]. Робот полностью автономный, он способен передвигаться по черной линии шириной 40мм, не покидая её на большой скорости. Полигон расположен в приложении на рисунке 15.
Полигон состоит из 10 секций 300х300мм, на которых отмечена траектория, по которой должен следовать робот. Траектория может отмечаться чёрной линией на белом фоне, либо белой линией на чёрном фоне [7]. Ширина линии 25 мм. Примерные виды секций показаны в таблице 1.
Таблица 1. Виды секций.
| Простой квадрат | Гладкий поворот | Прямая линия | Перекрёсток |
|
|
|
|
|
| Разветвление | Ответвление | Крутой поворот | Кривая |
|
|
|
|
|
| Инверсная прямая | Инверсный гладкий поворот | Большая горка | Тоннель |
|
|
|
| |









Материалы и инструменты
3D вид модели робота для соревнований находится в приложении, рисунок 8, фотография сборки модели на рисунке 9.
Для изготовления модели применялся следующий инструмент, материал и детали заводского производства:
Компьютер и 3D принтер.
Пластик для 3D принтера – 380 гр.
2 колеса, диаметром 40мм, шириной 15мм.
Шестеренки заводского производства - 8шт.
Электродвигатели от CD-привода – 2шт.
Текстолит фольгированный размером 60х70мм.
Набор радиодеталей для плат (см. принципиальную схему).
Аккумулятор 4.2V 1300mAh – 2шт.
Кассета для аккумуляторов – 1шт.
Болты и гайки М3 – по 4 шт.
Саморезы размером 2.6х10мм – 25шт.
Провода монтажные сечением 0,25мм2 и 0,5мм2, длиной по 350см.
Припой ПОС-60 с канифолью диаметром 3мм, длиной 10см.
Паяльник 40Вт 220в.
Набор слесарного и монтажного инструмента.
Механическая начинка модели
При разработке чертежей (рисунок 1) учитывалось, что изготовление шасси и корпуса модели робота будет на 3D принтере. Корпус модели состоит из двух частей, верхней и нижней рамы. Модель разрабатывалась на колесном шасси [1, 20]. Скорость вращения колес для передвижения по траектории не более 20мм в секунду [4].
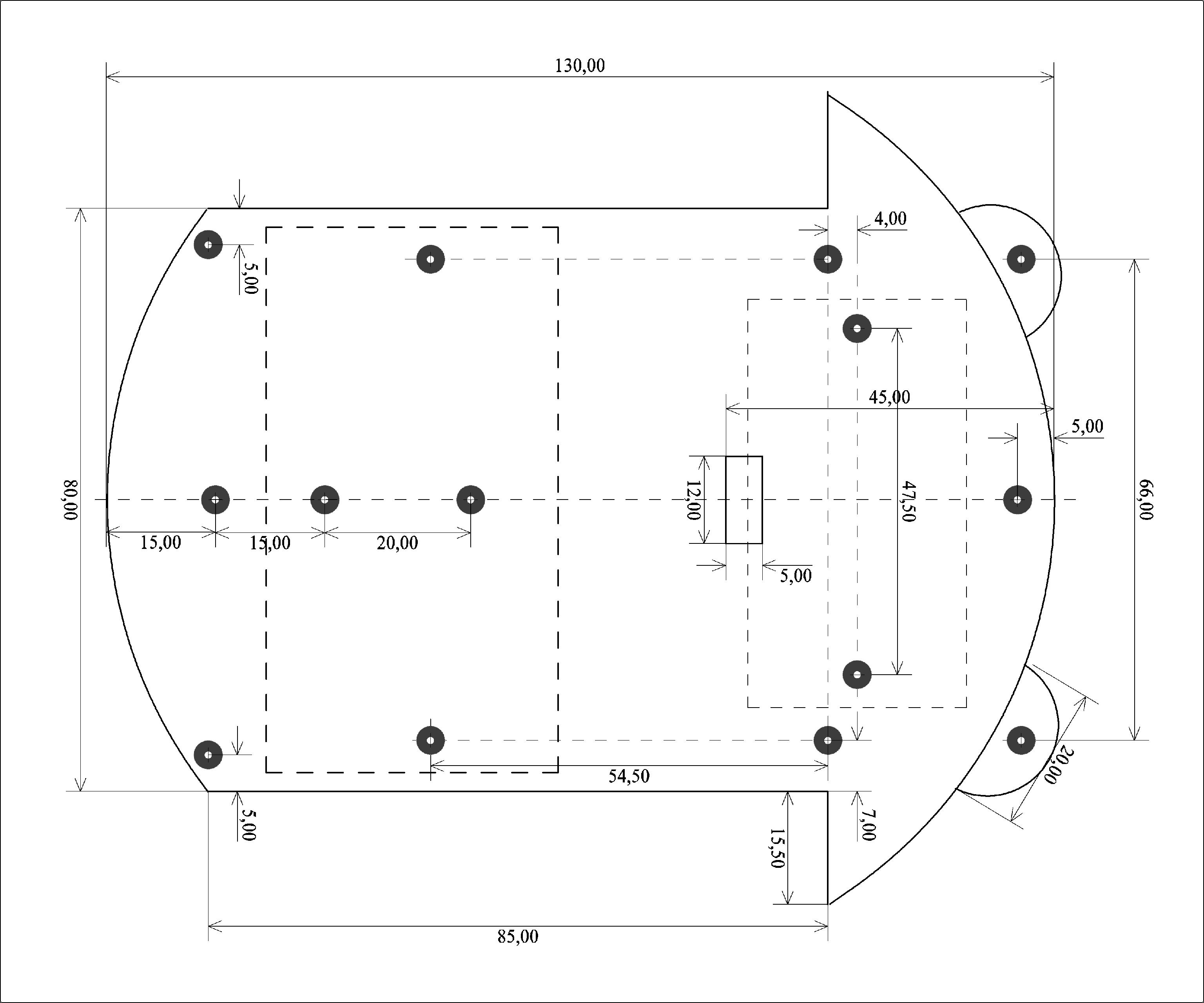
Рисунок 1. Чертеж рамы модели.
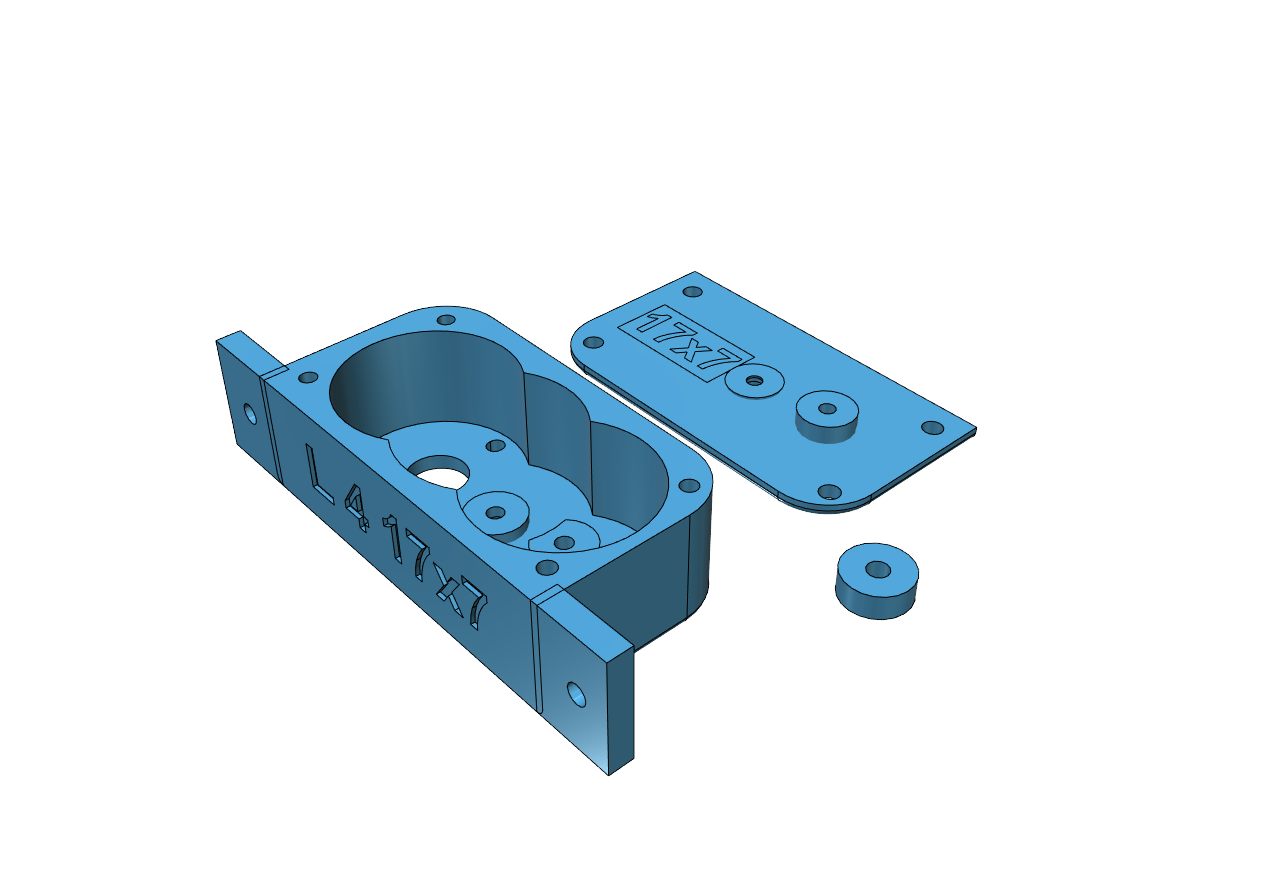
Колесное шасси, построено по стандартной схеме и состоит из двух самодельных редукторов с передачей вращения 1:100, которые крепится к раме снизу (рисунок 2).
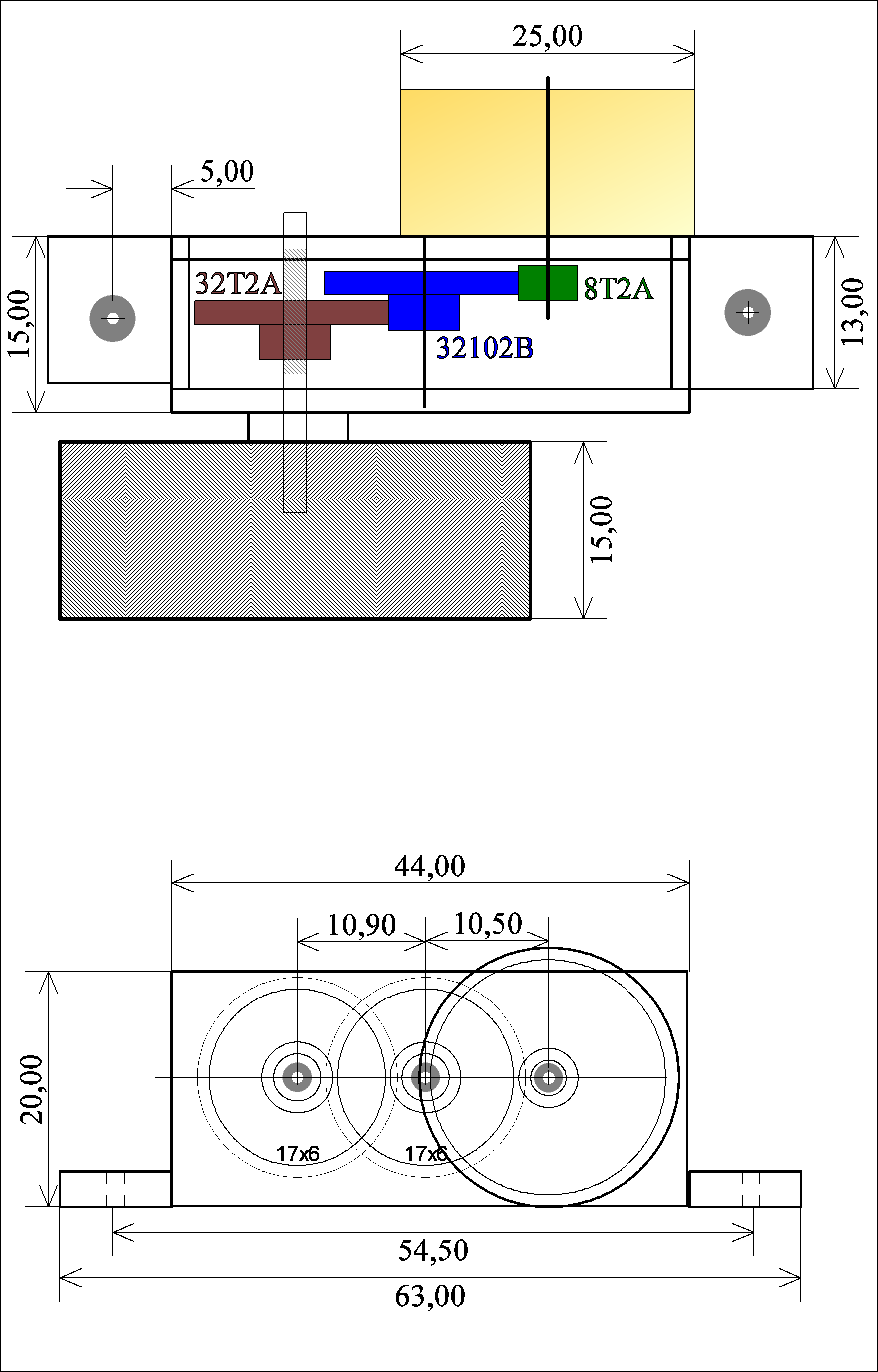
Рисунок 2. Чертеж редуктора.
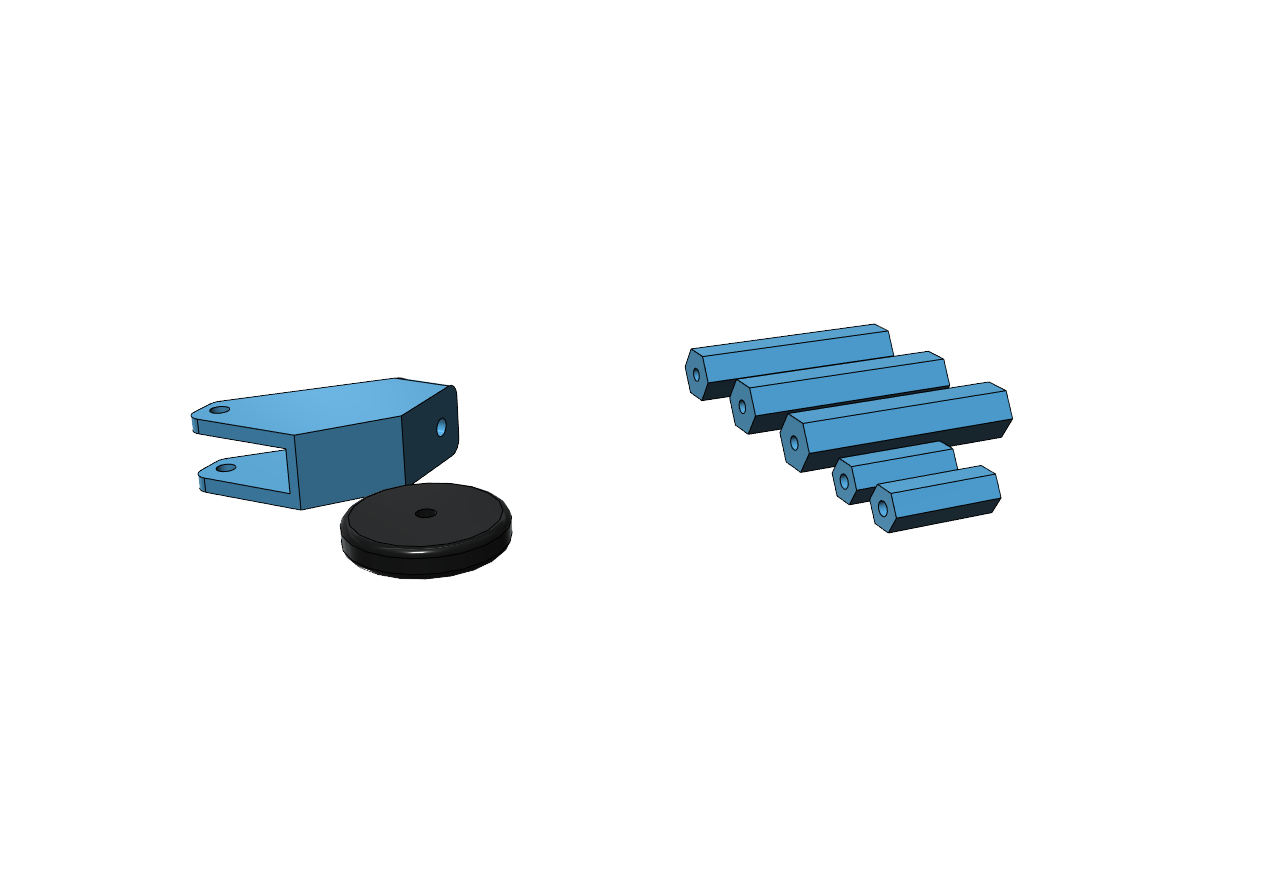
В передней части рамы располагаются датчики контроля черной линии, контроллер и драйвер ходовых двигателей [4]. На задней части рамы, кассета для аккумуляторов и поддерживающее колесо размером 20х4мм (рисунок 3).

Рисунок 3. Чертеж поддерживающего колеса.
Все детали рамы смоделированы в компьютерной программе Autodesk 3ds Max. Фотографии деталей показаны в приложении на рисунках 9 - 13.
Электронная начинка модели
Основные блоки управления моделью робота для соревнований построены на самодельных платах, всего их три. Плата контроллера марки Atmega 328 PU, плата драйвера двигателей на микросхеме L293D и плата датчиков линии на микросхеме марки 74HC14 [2]. Принципиальная схема электроники изображена на рисунке 4, монтажные платы на рисунке 5 -7 показаны со стороны деталей.
Программный код (скетч) для прохождения трассы представлен в приложении, таблица 2. После загрузки скетча в контроллер необходимо отладить программную часть под данную модель робота. Загрузка программы в контроллер производится с помощью программатора Arduino ISP в среде Arduino 1.05 [6].

Рисунок 4. Принципиальная схема электроники робота.
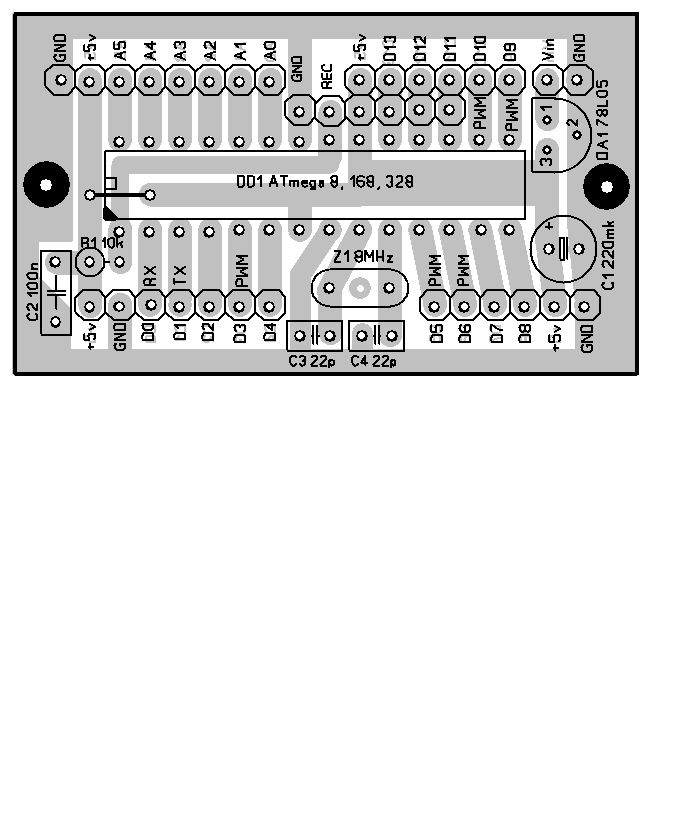
Рисунок 5. Монтажная плата контроллера (со стороны деталей).

Рисунок 6. Монтажная плата драйвера двигателей.

Рисунок 7. Монтажная плата датчиков контроля линии.
ЗАКЛЮЧЕНИЕ
Данная методическая разработка была апробирована в робототехническом объединении учащимися 1 года обучения.
После испытания первой модели робота были созданы еще шесть моделей и проводились соревнования в объединении с учащимися 5-6 классов.
Простота в сборке модели робота, в сочетании с готовыми программными кодами, позволило учащимся в конце урока увидеть собранную своими руками модель, которая после отладки выполняла поставленную ими же самими задачу.
Творческая работа над практическими заданиями способствует изучению составляющих современных спортивных роботов, а программная среда Arduino ID позволит легко и эффективно изучить алгоритмизацию и программирование.
Низкая себестоимость способствовала разработке модели робота, на примере которой наглядно продемонстрирован принцип алгоритма движения, выполнение поставленных задач.
ИСТОЧНИКИ ИНФОРМАЦИИ
Литература:
Рядчиков И. В., Синица С. Г., Брагин Б. О., Шепилов В. В., Пузановский К. В. Создание робота автономного движения по линии [Текст] // Технические науки: проблемы и перспективы: материалы III Междунар. науч. конф. (г. Санкт-Петербург, июль 2015 г.). — СПб.: Свое издательство, 2015. — С. 19-25.
Белов А. В. Самоучитель разработчика устройств на микроконтроллерах AVR. – СПб.: Наука и Техника, 2008. – 544 с.: ил.
Филиппов С. А. Робототехника для детей и родителей. — СПб.: Наука, 2013. 319 с.
Страковский Д. А., Симаков Е. Е. Создание робота-гонщика на платформе Arduino // Юный ученый. — 2016. — №3. — С. 120-124.
Мобильные минироботы. Электронный ресурс. Режим доступа //http://www.railab.ru/images/begin/course/materials/course3/metod3.htm.
Программирование микроконтроллеров AVR с помощью Arduino на примере ATmega8. Электронный ресурс. Режим доступа //http://andreyandreich.ru/atmega8-microcontroller.
Робофест-2015. Траектория. Электронный ресурс. Режим доступа //http://wiki.amperka.ru/соревнования:траектория.
ПРИЛОЖЕНИЕ
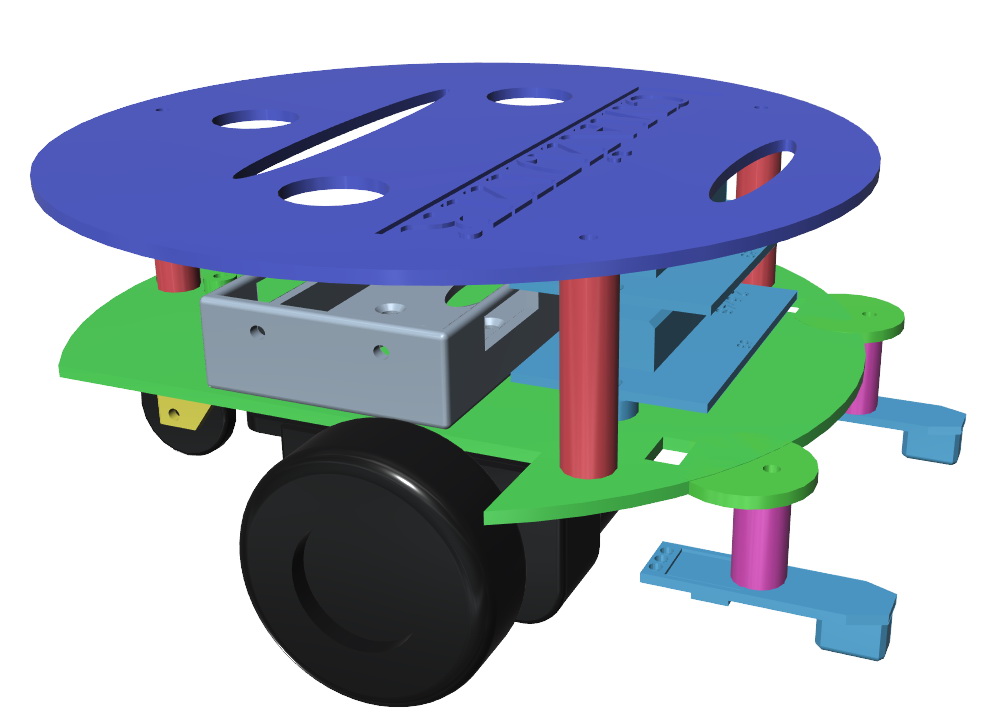
Рисунок 8. Модель робота для соревнований.
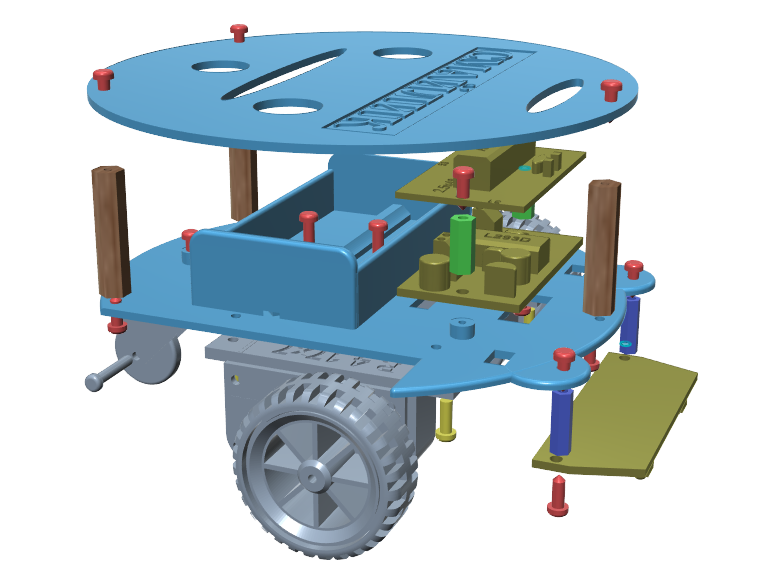
Рисунок 9. Сборка модели.

Рисунок 10. Рама модели.

Рисунок 11. Верх корпуса модели.

а) б)
Рисунок 12. Редукторы для модели, а – правый, б – левый.


а) б)
Рисунок 13. Колесо для модели, а – диск, б – шина.
а) б)
Рисунок 14. Поддерживающее колесико – а, стойки крепления корпуса – б.
Таблица 2. Программный код (скетч).
| int IR_L = 8; // pin 8 левый датчик int IR_R = 9; // pin 9 правый датчик
// подключение двигателей int DIR_L1 = 2; // IN1 - 2 направление вращения левого двигателя int DIR_L2 = 3; // IN2 - 3 направление вращения левого двигателя int PWM_L = 5; // EN1 - 5 скорость левого двигателя int DIR_R1 = 4; // IN3 - 4 направление вращения правого двигателя int DIR_R2 = 7; // IN4 - 7 направление вращения правого двигателя int PWM_R = 6; // EN2 - 6 скорость правого двигателя
const int FORWARD = 0; const int BACKWARD = 0; int obstacle_state = 0; int i = 0; // счетчик
void setup() { pinMode(PWM_L, OUTPUT); // конфигурируем все управляющие пины как выходные pinMode(PWM_R, OUTPUT); pinMode(DIR_L1, OUTPUT); pinMode(DIR_L2, OUTPUT); pinMode(DIR_R1, OUTPUT); pinMode(DIR_R2, OUTPUT); pinMode(IR_L, INPUT); pinMode(IR_R, INPUT); } void loop() // программа { // переменные sensor_L, sensor_C, и sensor_R содержат показания датчиков, // которые могут быть HIGH или LOW (true/false или 1/0). int sensor_L = digitalRead(IR_L); int sensor_R = digitalRead(IR_R); // Если все датчики на белом поле, то едем на максимальной скорости прямо. if(sensor_L == LOW && sensor_R == LOW) // LOW - белая линия, HIGH - черная линия { digitalWrite(DIR_L1, HIGH); // левый двигатель вперед digitalWrite(DIR_L2, LOW); analogWrite(PWM_L, 250); // скорость максимальная digitalWrite(DIR_R1, HIGH); // правый двигатель вперед digitalWrite(DIR_R2, LOW); analogWrite(PWM_R, 250); // скорость максимальная } // Если правый датчик попал на черную линию, поворачиваем плавно влево. if(sensor_L == LOW && sensor_R == HIGH) { digitalWrite(DIR_L1, HIGH); // левый двигатель вперед digitalWrite(DIR_L2, LOW); analogWrite(PWM_L, 250); // скорость максимальная digitalWrite(DIR_R1, HIGH); // правый двигатель вперед digitalWrite(DIR_R2, LOW); analogWrite(PWM_R, 50); // скорость минимум } // Если левый датчик попал на черную линию, поворачиваем плавно вправо. if(sensor_L == HIGH && sensor_R == LOW) { digitalWrite(DIR_L1, HIGH); // левый двигатель вперед digitalWrite(DIR_L2, LOW); analogWrite(PWM_L, 50); // скорость минимум
digitalWrite(DIR_R1, HIGH); // правый двигатель вперед digitalWrite(DIR_R2, LOW); analogWrite(PWM_R, 250); // скорость максимальная } // Если правый и левый датчики на черной линии, то резко поворачиваем влево. if(sensor_L == HIGH && sensor_R == HIGH) { digitalWrite(DIR_L1, LOW); // левый двигатель назад digitalWrite(DIR_L2, HIGH); analogWrite(PWM_L, 200); // скорость средняя
digitalWrite(DIR_R1, HIGH); // правый двигатель вперед digitalWrite(DIR_R2, LOW); analogWrite(PWM_R, 200); //скорость средняя } } |

Рисунок 15. Полигон для соревнований Траектория – Пазл.
20






Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

