







© 2018, Кобченко Ангелина Владимировна 1114 5


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 10.03.2020 21:15

Кобченко Ангелина Владимировна
Преподаватель специальных дисциплин
Специализация
"Особенности применения систем автоматического регулирования температуры"
Категория:
Прочее
24.05.2018 15:20

Просмотр содержимого документа
«"Особенности применения систем автоматического регулирования температуры"»
Департамент внутренней и кадровой политики Белгородской области
Областное государственное автономное
профессиональное образовательное учреждение
«Белгородский индустриальный колледж»
ЭССЕ на тему:
«Особенности применения систем автоматического регулирования температуры»
Подготовлено преподавателем
ОГАПОУ БИК А.В. Кобченко
Белгород, 2017 г.
Системы автоматического регулирования (САР) применяются для регулирования отдельных параметров, таких как температура, давление, уровень, расход и т.д., в объекте управления. В современных системах автоматического управления (САУ) системы автоматического регулирования являются подсистемами САУ и их применяют для регулирования различных параметров при управлении объектом или процессом.
Принцип действия всякой системы автоматического регулирования заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
Для осуществления автоматического регулирования к регулируемому объекту подключается автоматический регулятор, вырабатывающий управляющее воздействие на регулирующий орган. Это управляющее воздействие вырабатывается регулятором в зависимости от разности между текущим значением регулируемой величины, измеряемой датчиком, и желаемым её значением, устанавливаемым задатчиком. Регулируемый объект и автоматический регулятор вместе образуют систему автоматического регулирования.
Основным признаком САР, является наличие главной обратной связи, по которой регулятор контролирует значение регулируемого параметра.
По принципу регулирования все системы автоматического регулирования подразделяются на четыре класса.
1. Система автоматической стабилизации - система, в которой регулятор поддерживает постоянным заданное значение регулируемого параметра.
2. Система программного регулирования - система, обеспечивающая изменение регулируемого параметра по заранее заданному закону (во времени).
3. Следящая система - система, обеспечивающая изменение регулируемого параметра в зависимости от какой-либо другой величины.
4. Система экстремального регулирования - система, в которой регулятор поддерживает оптимальное для изменяющихся условий значение регулируемой величины.
Для регулирования температурного режима электронагревательных установок применяются в основном системы двух первых классов.
Системы автоматического регулирования температуры по роду действия можно разделить на две группы: прерывистого и непрерывного регулирования.
Автоматические регуляторы систем автоматического регулирования (САР) по функциональным особенностям разделены на пять типов: позиционные (релейные), пропорциональные (статические), интегральные (астатические), изодромные (пропорционально-интегральные), изодромные с предварением и с первой производной.
Позиционные регуляторы относятся к прерывистым САР, а остальные типы регуляторов - к САР непрерывного действия. Ниже рассмотрены основные особенности позиционных, пропорциональных, интегральных и изодромных регуляторов, имеющих наибольшее применение в системах автоматического регулирования температуры.
Функциональная схема автоматического регулирования температуры (рис. 1) состоит из объекта регулирования 1, датчика температуры 2, программного устройства или задатчика уровня температуры 4, регулятора 5 и исполнительного устройства 8. Во многих случаях между датчиком и программным устройством ставится первичный усилитель 3, а между регулятором и исполнительным устройством - вторичный усилитель 6. Дополнительный датчик 7 применяется в изодромных системах регулирования.

Рисунок – 1. Функциональная схема автоматического регулирования температуры
В качестве датчиков температуры применяются термопары, термосопротивления (термисторы) и термометры сопротивления. Наиболее часто используются термопары.
Позиционными называют такие регуляторы, у которых регулирующий орган может занимать два или три определенных положения. В электронагревательных установках применяются двух- и трехпозиционные регуляторы. Они просты и надежны в эксплуатации.
На рис. 2 показана принципиальная схема двухпозиционного регулирования температуры воздуха.
Для контроля температуры в объекте регулирования служит термосопротивление ТС, включенное в одно из плеч измерительного моста 2. Величины сопротивлений моста подбираются таким образом, чтобы при заданной температуре мост был уравновешен, то есть напряжение в диагонали моста равнялось нулю. При повышении температуры поляризованное реле 3, включенное в диагональ измерительного моста, включает одну из обмоток 4 электродвигателя постоянного тока, который с помощью редуктора 6 закрывает воздушный клапан перед калорифером 7. При понижении температуры воздушный клапан полностью открывается.
При двухпозиционном регулировании температуры количество подаваемого тепла может устанавливаться только на двух уровнях - максимальном и минимальном. Максимальное количество тепла должно быть больше необходимого для поддержания заданной регулируемой температуры, а минимальное - меньше. В этом случае температура воздуха колеблется около заданного значения, то есть устанавливается так называемый автоколебательный режим (рис. 3, а).
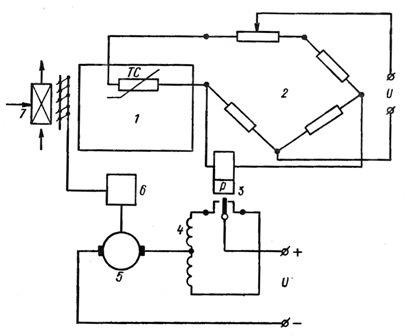
Рисунок - 2. Принципиальная схема двухпозиционного регулирования температуры воздуха: 1 - объект регулирования, 2 - измерительный мост, 3 - поляризованное реле, 4 - обмотки возбуждения электродвигателя, 5 - якорь электродвигателя, 6 - редуктор, 7 - калорифер.
Линии, соответствующие температурам τн и τв, определяют нижнюю и верхнюю границы зоны нечувствительности. Когда температура регулируемого объекта, уменьшаясь, достигает значения τн количество подаваемого тепла мгновенно увеличивается и температура объекта начинает возрастать. Достигнув значения τв, регулятор уменьшает подачу тепла, и температура понижается.

Рисунок - 3. Временная характеристика двухпозиционного регулирования (а) и статическая характеристика двухпозиционного регулятора (б).
Скорость повышения и понижения температуры зависит от свойств объекта регулирования и от его временной характеристики (кривой разгона). Колебания температуры не выходят за границы зоны нечувствительности, если изменения подачи тепла сразу вызывают изменения температуры, то есть если отсутствует запаздывание регулируемого объекта.
С уменьшением зоны нечувствительности амплитуда колебаний температуры уменьшается вплоть до нуля при τн = τв. Однако для этого требуется, чтобы подача тепла изменялась с бесконечно большой частотой, что практически осуществить чрезвычайно трудно. Во всех реальных объектах регулирования имеется запаздывание. Процесс регулирования в них протекает примерно так.
При понижении температуры объекта регулирования до значения τн мгновенно изменяется подача тепла, однако из-за запаздывания температура некоторое время продолжает снижаться. Затем она повышается до значения τв, при котором мгновенно уменьшается подача тепла. Температура продолжает еще некоторое время повышаться, затем из-за уменьшенной подачи тепла температура понижается, и процесс повторяется вновь.
На рис. 3, б приведена статическая характеристика двухпозиционного регулятора. Из нее следует, что регулирующее воздействие на объект может принимать только два значения: максимальное и минимальное. В рассмотренном примере максимум соответствует положению, при котором воздушный клапан (рис. 2) полностью открыт, минимум - при закрытом клапане.
Знак регулирующего воздействия определяется знаком отклонения регулируемой величины (температуры) от ее заданного значения. Величина регулирующего воздействия постоянна. Все двухпозиционные регуляторы обладают гистерезисной зоной α, которая возникает из-за разности токов срабатывания и отпускания электромагнитного реле.
Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

