
Россия, Москва


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 16.04.2024 00:00

Беседин Андрей Владимирович
Преподаватель
51 год
Местоположение
Открытое занятие «Использование инструментов платформы Интернета вещей для автоматизации управления умными подключенными устройствами»
Категория:
Прочее
13.03.2024 14:17

Просмотр содержимого документа
«Открытое занятие «Использование инструментов платформы Интернета вещей для автоматизации управления умными подключенными устройствами»»

МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования
«МИРЭА – Российский технологический университет»
РТУ МИРЭА
Колледж программирования и кибербезопасности
Учебная дисциплина: ОП.17 Интернет вещей
Тема занятия:
Использование инструментов платформы Интернета вещей для автоматизации управления умными подключенными устройствами
18 ноября 2022 г.
Цель: Разработать автоматизированный процесс сборки изделия.
Создать виртуальные вещи (цифровые двойники) оборудования производственной ячейки;
Разработать веб-интерфейс автоматизированного рабочего места;
Организовать в веб-интерфейсе вывод данных, полученных от оборудования (значения температуры сервомоторов робота);
Отобразить в веб-интерфейсе список команд выполняемой сборки изделия;
Организовать автоматическую сборку изделия;
Создать в веб-интерфейсе возможность отображения работы робота в виде сигнальной индикации и отправки ее на светосигнальную лампу.
Понятие Thing и ее основные элементы;
Основные типы данных в элементе Thing - Properties;
Назначение компонента DataShape;
Назначение компонента Style Definations и State Definations;
Назначение компонента Mashups и его основные виджеты.
Название проекта
RobotX1Название вещей
RobotX1 TrafficLightsXНазвание основного сервиса для вещей
InOutService Данные для реализации поставленных задач Данные поступающие с робота-паллетайзера:c – номер последней выполненной команды;
s – статус работы робота (0 – команда не выполняется, 1 – команда выполняется);
t1, t2, t3, t4 – температура сервомоторов.
Данные принимаемые роботом-паллетайзером:N – номер следующей выполняемой команды; X – позиция координаты X;
Y – позиция координаты Y; Z – позиция координаты Z;
V – работа вакуума (0 – вакуум выключен, 1 – вакуум включен).
Данные принимаемые светосигнальной лампой:L1 – синий цвет (0 – лампа выключена, 1 – лампа включена); L2 – красный цвет (0 – лампа выключена, 1 – лампа включена); L3 – желтый цвет (0 – лампа выключена, 1 – лампа включена); L4 – зеленый цвет (0 – лампа выключена, 1 – лампа включена).
Данные для реализации поставленных задач Начальная позиция робота-паллетайзера при его подключении:X = 180, Y = -180, Z = 150, V = 0
Целевые точки робота-паллетайзера:Начальная позиция сборки
X = 140, Y = 0, Z = 150, V = 0
Конечная позиция сборкиX = 0, Y = -140, Z = 150, V = 0
Конечная позиция робота-паллетайзера по окончании работы:X = 180, Y = -180, Z = 150, V = 0
Работа светосигнальной лампы в автоматизированном процессе При нахождении робота-паллетайзера в начальной и конечной позициях: X = 180, Y = -180, Z = 150, V = 0
синий цвет (1), красный цвет (1), желтый цвет (1), зеленый цвет (1)
В процессе работы робота-паллетайзера:синий цвет (0), красный цвет (0), желтый цвет (0), зеленый цвет (1)
Данные для реализации поставленных задач
С поднятой рукой перемещение в начальную целевую позицию;
Опустить руку в начальной целевой позиции;
Включить вакуум в начальной целевой позиции;
Поднять руку в начальной целевой позиции;
Переместить руку в конечную целевую позицию;
Опустить руку в конечной целевой позиции;
Отключить вакуум в конечной целевой позиции;
Поднять руку в конечной целевой позиции;
Переместить руку в конечную позицию работы робота-паллетайзера
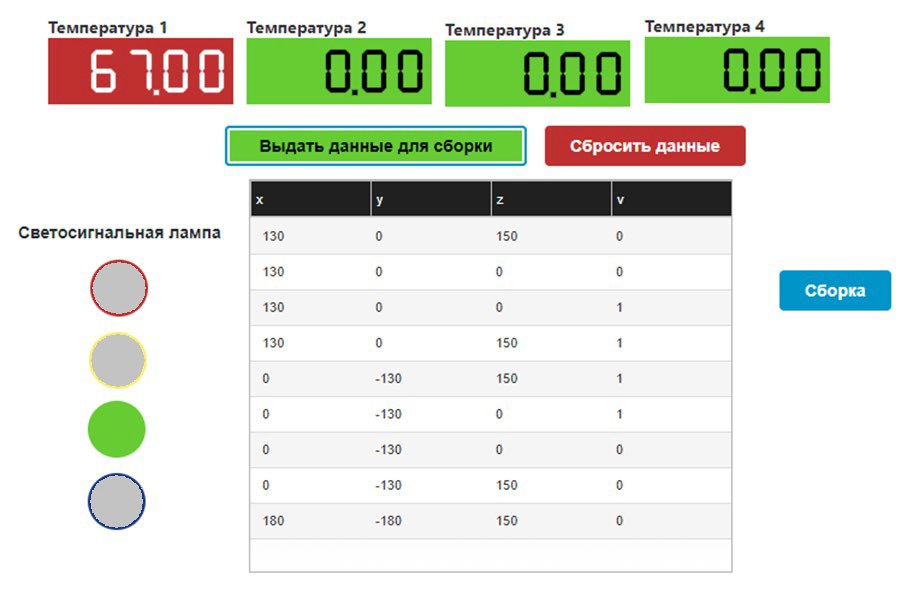
На Mashup реализовать визуализацию данных о температурах полученных с сервомоторов на LED Display следующим образом:
Температура в диапазоне от 0 до 40°C – LED Display (зеленый цвет);
Температура в диапазоне от 41 до 50°C – LED Display (желтый цвет);
Температура в диапазоне от 51 до 100°C – LED Display (красный цвет).

Внешний вид Mashup
Открытое занятие
Тема: Использование инструментов платформы Интернета вещей для автоматизации управления умными подключенными устройствами
(группа ЩАКО-01-21)














Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

