
Россия, Каменск-Шахтинский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 17.04.2026 10:21

Барышев Евгений Валентинович
педагог дополнительного образования
61 год
Местоположение
Специализация
Передаточное число редуктора
Категория:
Прочее
16.03.2023 11:49

Просмотр содержимого документа
«Передаточное число редуктора»
муниципальное бюджетное учреждение
дополнительного образования «Станция юных техников»
города Каменск-Шахтинский
Принята на методическом совете
Протокол №______ от «___» _________ 20___г
(Для учащихся 1 года обучения робототехнических объединений учреждений дополнительного образования)
Автор: Барышев Е. В.
педагог дополнительного образования.
2023
Оглавление
| Введение | 3 | |
| 1. | Пояснительная записка | 4 |
| 2. | Основная часть | 6 |
| 3. | Заключение | 18 |
| 4. | Источники информации | 19 |
Введение
Мехатроника - область науки и техники, основанная на объединении узлов точной механики с электронными, электротехническими и компьютерными компонентами, обеспечивающими проектирование и производство качественно новых механизмов, машин и систем с интеллектуальным управлением их функциональными движениями.
Сегодня мехатронные модули и системы находят широкое применение в следующих областях: станкостроение и оборудование для автоматизации технологических процессов; робототехника; авиационная, космическая и военная техника; автомобилестроение [4].
Передаточное отношение - это соотношение угловых скоростей или крутящих моментов валов (в зависимости от строения механизма).
Передачи применяются для того, чтобы передать вращающий момент от электродвигателя к исполнительному устройству. Почему это необходимо? Дело в том, что сам мотор обычно не может передать требуемый вращающий момент, кроме того, частота вращения вала электродвигателя оказывается слишком велика, поэтому её надо понизить. Для этого и сконструированы понижающие передачи, редукторы. Таким образом, удаётся изменить сразу и частоту вращения вала, и крутящий момент.. [3].
Пояснительная записка
Практика участия учащихся объединения «Робототехника» в конкурсах и научно-практических конференциях показала, что недостаточно качественно изготовленной модели и интересного исследования, не менее важно правильно оформить документацию, представить выгодные стороны своего исследования, доказать целесообразность своей разработки, отстоять свои позиции в конкретной области науки и техники.
В методической разработке рассмотрены виды и типы редукторов в робототехнических системах, а также сферы их использования в современном мире.
Методическая разработка является частью приложения к образовательной программе «Робототехника», (первый год обучения, раздел 2 «Простые механизмы и их применение»), рассчитана на учащихся 12 – 13 лет и направлена на достижение следующих целей и задач:
Образовательные:
изучения современных видов и типов мехатронных и робототехнических систем;
самостоятельно приобретают недостающие знания из разных источников.
Развивающие:
развития у учащихся осознания значимости коллективной работы для получения результата, роли сотрудничества, совместной деятельности в процессе выполнения творческих заданий;
развитие интересов в сфере использования в современном мире мехатронных и робототехнических систем.
Воспитывающие:
воспитание всестороннего интереса учащихся в опытной, поисковой, исследовательской работе, побуждение к углубленному изучению различных областей науки и техники;
воспитание чувства взаимоуважения между кружковцами.
Указанные цели достигаются через особую организацию образовательного пространства и:
влияют на разные аспекты и стороны личности,
создают условия для появления у нее мотива к самоизменению,
создают условия личностному росту;
формируют у учащихся научные взгляды, творческое мышление, трудолюбие, высокие нравственные качества;
пропаганде научных знаний, достижений мировой науки и техники.
Основная часть
Методологической базой для написания работы послужили общенаучные методы исследования: обобщения, анализа и синтеза, систематизации, а также изучение научной и учебной литературы [1].
Передачи с крутящим моментом
Механизм передачи крутящего момента — редуктор — имеет входной и выходной валы.
Существует два способа передачи вращающего момента: жёсткий (момент передается жесткими звеньями, например, шестернями) и фрикционный (момент передается силами трения, работающих на поверхностях вала, например, ременная передача). Также есть возможность совмещать эти способы передачи.
Характеристика зубчатой передачи редуктора
Зубчатая передача редуктора – это механизм, состоящих из отдельных звеньев для передачи мощности через вращение зубчатых колёс. Такую зубчатую передачу используют в механических редукторах для преобразования движения.
Зубчатые редукторы очень часто задействуют в машиностроении. Именно их выбирают благодаря большому количеству преимуществ: высокому КПД, долгому сроку службы механизма, маленьким габаритам, постоянству передаточного отношения, простой и надёжной конструкции.
Также у этих редукторов есть и недостатки. К ним относят шум при больших скоростях и большие размеры редукторов, если передаточные отношения велики.
Многоступенчатые редукторы
Как известно, современные электродвигатели выдают частоту ведущего вала примерно в районе полутора тысячи (1500) оборотов в минуту. А конечным потребителям в цепочке передачи движения обычно требуется куда меньшая частота. Стоит рассмотреть для лучшего понимания на конкретном примере. Возьмём, скажем, ленту транспортёра. Она движется медленно. Как же сделать так, чтобы надежно передать вращающий момент от электродвигателя к конечному устройству?
Здесь на помощь как раз и придут многоступенчатые редукторы. Наличие нескольких ступеней позволяет сделать компактное устройство, значительно снижающее частоту вращения вала.
Как правильно рассчитать передаточное число?
Передаточное число многоступенчатого редуктора вычисляется как произведение передаточных чисел каждой ступени. Пример. В редукторе четыре зубчатые пары, передаточные отношения каждой из которых тоже равны 4. Общее передаточное число тогда будет равно 4х4х4х4 = 256.
В общем случае общее передаточное отношение редуктора равно отношению частоты вращения входного (ведущего) вала и частоты вращения ведомого (выходного) вала. Отсюда следует, что если выходной вал вращается медленнее входного, то передаточное отношение будет больше единицы. Такие передачи называют понижающими. Если же скорость выходного вала будет выше скорости входного вала, то передаточное число будет меньше единицы. В этом случае говорят о повышающей передаче или мультипликаторе.

Рис. 1. Передаточное число многоступенчатого редуктора
При передаче движения всегда соответственно меняется и крутящий момент: если передача понижающая, то момент увеличивается, если повышающая, то уменьшается. Поэтому передаточное число можно представить как отношение крутящего момента на выходе к крутящему моменту на входе в редуктор.
Расчёт без учета сопротивления
Любой редуктор состоит из зубчатых пар. Чтобы рассчитать передаточное число каждой пары, надо разделить количество зубьев ведущего колеса на количество зубьев ведомого колеса.
Важно! При этом надо смотреть, меняется ли направление вращения шестеренки. Если меняется, то передаточное отношение принимается со знаком минус, если не меняется, то плюс. Направление вращения не меняется, если у колеса нарезка зубьев сделана внутри колеса.
Если в передаче участвует так называемая паразитка, то она в расчете передаточного отношения не участвует, так как ее задача лишь менять направление движения.
Также при расчете передаточных отношений можно использовать наружный диаметр шестерни. Иногда это удобно, если посчитать число зубьев затруднительно. Важно: зубчатая передача жесткая, здесь нет проскальзывания, как в ременной передаче, поэтому передаточное число всегда можно рассчитать с абсолютной точностью.
Если в редукторе применен червячный редуктор, то его передаточное отношение определяется как отношение числа зубьев ведущего колеса к числу заходов (витков) червяка. Чаще всего у червяка один заход, поэтому ясно: передаточное отношение червячной пары огромно, а вращающий момент может повышаться в десятки раз.
КПД зубчатой передачи
Преимуществами данной передачи считаются:
1. Большая и неограниченная мощность.
2. Небольшая масса и габариты.
3. Большой коэффициент полезного действия (приблизительно 0,95).
4. Надёжны, но нуждаются в большой точности изготовления.
КПД определяется как отношение реально полученной энергии к потребленной. Чем выше КПД механизма, тем больше энергии преобразовывается на полезные цели, тем меньше потери, тем эффективнее механизм.
Учёные всего мира постоянно ведут борьбу именно за сокращение непроизводительных потерь. Чтобы обеспечить хорошую работу машины с большим КПД, можно использовать масла с различными свойствами при больших изменениях температуры среды. При экспериментах с различными видами масла совместно с допустимой нагрузочной способности зубчатых передач на рабочих поверхностях зубьев не обнаружили развитие процесса разрушения, что обеспечивает отличные технико-экономические показатели машины.
Важно! КПД зубчатой передачи сильно зависит от точности изготовления зубчатых колес. В случае грубых нарушений геометрии в редукторе будут большие расходы энергии, он будет нагреваться, его КПД значительно упадёт. Поэтому редукторы следует приобретать только у проверенных производителей.
Постоянное и переменное передаточное отношение редуктора
Передаточное отношение может быть как постоянным, так и переменным. При переменном случае оно может меняться бесступенчато или ступенчато. В промышленности нашли применение обе эти схемы. Если передаточное число меняется плавно, то такое устройство называют вариатором. Эти устройства дороги и требуют точной сборки и квалифицированного обслуживания. Но всё это оправдывается конечным результатом - их полезность уже проверена временем.
Что такое сервопривод?
Под сервоприводом следует понимать такое устройство, которое обеспечивает возможность управления рабочим органом посредством обратной связи. Само название произошло от латинского servus, что в переводе означает помощник. Изначально сервопривод использовался в качестве вспомогательного оборудования для различных станков, машин и механизмов. Однако с развитием технологий и постоянно растущей необходимостью повышать точность электронных устройств им начали отводить куда более значимую роль.
Устройство и принцип работы

Рис. 2. Устройство сервопривода
Устройство и принцип работы каждого сервопривода может кардинально отличаться от других моделей. Однако в качестве примера мы рассмотрим наиболее актуальные варианты.
Конструктивно он может состоять из:
Привода – устройства, приводящего в движение рабочий орган. Может выполняться посредством синхронного или асинхронного двигателя, пневмоцилиндра и т.д.
Передаточный механизм – система шестеренчатой кривошипной или другой передачи, редуктор.
Рабочий элемент – управляет перемещением в пространстве, непосредственно вал редуктора, передаточный механизм и т.д.
Датчик – сигнализирует о достигнутом положении и передает информацию по каналу обратной связи.
Блок питания – может применяться в случае прямого подключения сервопривода к сети, где требуется преобразование уровня и типа напряжения.
Блок управления – осуществляет подачу управляющих сигналов на сервомотор для передвижения или корректировки места положения. Для этого применяются микропроцессоры, микроконтроллеры и т.д. К примеру, очень популярна плата Arduino.
Принцип действия заключается в подаче управляющего импульса на асинхронный или синхронный двигатель, который начинает вращаться, пока рабочий орган не окажется в нужной позиции. Как только будет достигнуто установленное положение, на датчике обратной связи появится нужный сигнал, который, перейдя на блок управления, прекратит питание электромеханического устройства. Движение сервопривода прекратится до появления новых электрических сигналов.
Далее начнется новый цикл работы устройства, число команд и последовательность их выполнения определяется заложенной программой.
Сравнение с шаговым двигателем
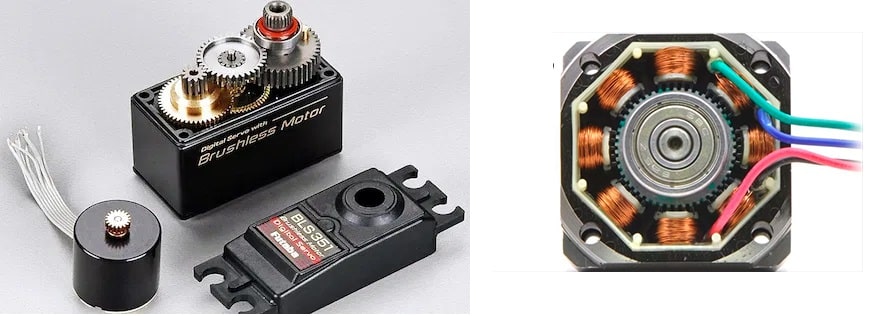
Рис. 3. Сравнение с сервопривода с шаговым двигателем
Вполне вероятно вы могли слышать, что та же функция часто выполняется шаговыми двигателями, однако между этими двумя устройствами имеется существенное отличие. Шаговый привод действительно осуществляет точное позиционирование объекта за счет четкого числа подаваемых на электрическую машину импульсов, они достаточно тихоходны и не создают лишнего шума. В остальном сервоприводы обладают рядом весомых преимуществ по сравнению с шаговыми электродвигателями:
Могут использовать для привода любой тип электрической машины – синхронный, асинхронный, электродвигатель постоянного тока и т.д.
Точность механического привода не зависит от износа деталей, появления люфтов, термических и механических изменений конструктивных элементов.
Диагностирование неисправностей происходит моментально за счет обратной связи.
Скорость вращения – любой обычный электродвигатель вращается быстрее шагового привода.
Экономичность – вращение вала у шаговой электрической машины осуществляется при максимально допустимом напряжении питания, чтобы обеспечить максимальный момент.
Но кроме перечисленных преимуществ есть ряд позиций, по которым сервопривод уступает шаговому двигателю:
Сложность системы управления и необходимость реализации ее работы – шаговый двигатель контролируется обычным счетчиком числа импульсов.
Необходимость контролировать как частоту вращения, так и принимать меры для принудительного затормаживания в нужной точке – это приводит к дополнительным затратам энергии, программных и механических ресурсов.
Обязательно используется дополнительный измерительный блок, контролирующий положение рабочего органа.
Сервопривод обладает значительно большей стоимостью, поэтому применение шагового двигателя обходится дешевле.

Рис. 4. Область применения
Сервопривод используется в самых различных направлениях науки и техники, где электрический привод, помимо функции вращения каких-либо элементов, должен выполнить и точное позиционирование. На практике они повсеместно используются в ЧПУ станках, автоматических задвижках, электронных клапанах, заводских станках с программным управлением, робототехнике.
В бытовых системах сервомоторы устанавливаются в системах отопления для регулировки подачи теплоносителя, топлива, управления нагревательным элементом, контроля переключения между центральными и автономными системами энергетических ресурсов и т.д. В автомобилях их используют для отпирания, запирания багажника, электронных блокировок.
Разновидности
За счет многолетнего развития сервоприводов сегодня можно встретить самые различные виды устройства. Поэтому мы рассмотрим наиболее распространенные критерии разделения.
По типу привода:
асинхронные сервоприводы – получаются дешевле, чем с синхронным электродвигателем, могут обеспечить точность даже при низких оборотах выходного вала;
синхронные – более дорогой вариант, но быстрее разгоняется, что повышает скорость выполнения операций;
линейные – не используют классических электрических моторов, но способны развивать большое ускорение.
По принципу действия выделяют:
электромеханический сервопривод – движение обеспечивается электрической машиной и шестеренчатым редуктором;
гидромеханический серводвигатель – движение осуществляется при помощи поршневого цилиндра, обладают значительно большей скоростью перемещения;
По материалу передаточного механизма:
полимерные – износоустойчивые и легкие, но плохо переносят большие механические нагрузки;
металлические – наиболее тяжелый вариант, относительно быстро изнашиваются, но могут выдерживать любые нагрузки;
карбоновые – имеют средние характеристики по прочности и износоустойчивости, в сравнении с двумя предыдущими, но имеют более высокую стоимость.

Рис. 5. По материалу шестерней
По типу вала двигателя:
с монолитным ротором – тяжелые сервоприводы, создают вибрацию при вращении;
с полым ротором – самые легкие модели, быстро реагируют на команды и набирают обороты, их легче контролировать;
с бесколлекторным ротором – не имеют подвижных контактов, которые создают дополнительное сопротивление вращению, наиболее дорого вариант.

Рис. 6. По типу вала
Технические характеристики
При выборе конкретной модели сервопривода необходимо руководствоваться основными техническими параметрами, которые изготовитель указывает в паспорте устройства.
Наиболее значимыми характеристиками сервомотора являются:
Усилие на валу серводвигателя – определяет механический момент и способность перемещать определенный вес, создавать усилие при резке, фрезеровке и т.д.

Рис. 7. Усилие на валу
Скорость вращения – показывает, сколько поворотов вала может совершить устройство за единицу времени.
Величина питающего напряжения – чаще всего электроснабжение сервопривода выполняется постоянным током, хотя встречаются модели и с переменным током выходного напряжения. Подключение питания к сервоприводу осуществляется тремя проводами: питающим, управляющим и общим.
Угол вращения сервопривода – поворот выходного элемента, как правило, выпускается на 180° и 360°.
Скорость поворота – подразделяется на сервоприводы с постоянным вращением и с переменной частотой.
Способы управления

Рис. 8. Способ управления сервоприводом
По способу управления могут быть аналоговые или цифровые сервоприводы, первый из них подает сигналы с разной частотой, которая задается специальной микросхемой, контролирующей работу устройства. Цифровые сервоприводы, в свою очередь, отличаются наличием процессора, который принимает команды и реализует их в качестве различных режимов работы на приводе.
Их практическое отличие заключается в наличии мертвых зон у аналоговых способов, цифровые лишены этого недостатка, к тому же они быстрее реагируют на изменения и обладают большей точностью. Однако цифровой способ управления имеет большую себестоимость и на свою работу он расходует больше электроэнергии.
На рисунке 8 приведен пример управления сервоприводом с помощью подаваемых импульсов:

Рис. 9. Схема управления сервоприводом
Как видите на рисунке, сигнал поступает к генератору опорных импульсов (ГОП), подключенному к потенциометру. Далее сигнал поступает на компаратор (К), сравнивающий величины на выходе схемы и поступающие от датчика на рабочем органе. После этого прибор управления мостом (УМ) открывает нужную пару транзисторов моста для вращения вала мотора (М) по часовой или против часовой стрелки, также может задавать усилие за счет полного или частичного открытия перехода.
Заключение
Данная методическая разработка была апробирована в робототехническом объединении учащимися 1 года обучения в течение трех лет.
Реализация методической разработки позволила заинтересовать учеников к робототехнике и узнать больше информации о редукторах системах движения. Учитель из носителя готовых знаний он превращается в организатора познавательной, исследовательской деятельности своих учеников. Изменяется и психологический климат в объединении, так как учителю приходится переориентировать свою учебно - воспитательную работу и работу учащихся на разнообразные виды самостоятельной деятельности учащихся, на приоритет деятельности исследовательского, поискового, творческого характера в данном направлении.
Источники информации
Мехатроника - Mechatronics [Электронный ресурс]. Режим доступа: https://wikichi.ru.
Мехатроника [Электронный ресурс]. Режим доступа: https://ru.wikipedia.org Мехатроника основы, методы, применение [Электронный ресурс]. Режим доступа: http://такиедела.рф.
Робототехника в современном мире [Электронный ресурс]. Режим доступа: https://school-science.ru.
Терминология мехатроники [Электронный ресурс]. Режим доступа: https://helpiks.org.
Что за специальность такая, Мехатроника? [Электронный ресурс]. Режим доступа: https://pikabu.ru.
Что такое робототехника? [Электронный ресурс]. Режим доступа: https://mining-cryptocurrency.ru.
Передаточное число редуктора. [Электронный ресурс]. Режим доступа: https://www.ttaars.ru/about/stati/peredatochnoe-chislo-reduktora.
Что такое сервопривод? [Электронный ресурс]. Режим доступа: https://www.asutpp.ru/chto-takoe-servoprivod.html.
21







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

