
Россия, Чебоксары


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до 15.06.2025
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 15.05.2025 14:33

Андреева Леонилла Германовна
преподаватель электротехнических дисциплин
54 года
Местоположение
Специализация
Презентация к уроку "Регулирование частоты вращения асинхронных двигателей"
Категория:
Прочее
24.09.2020 22:14

Просмотр содержимого документа
«Презентация к уроку "Регулирование частоты вращения асинхронных двигателей"»
ТЕМА: Регулирование частоты вращение асинхронного двигателя
МДК 01.01 Электрические машины и аппараты
leonilla.andreva@yandex.ru

Образовательный аспект :
- Изучить способы регулирования частоты вращения асинхронных электродвигателей
- систематизировать знания студентов по пуску асинхронного двигателя
Развивающий аспект :
- способствовать развитию интереса к специальным дисциплинам;
- развивать логическое мышление, внимание, умение логически
высказывать свои мысли, умение выделять главное; Воспитательный аспект :
1)способствовать воспитанию у студентов устойчивого интереса к МДК 01.03;
2) воспитывать осознанное стремление к получению новых знаний, развивать самостоятельность.
- Вспомните, что вы знаете по этой теме. Запишите кратко: «Знаю:…»
- Чему сегодня на уроке можно научиться? Что хотели бы узнать? Запишите кратко: «Хочу знать:…» (З столбик пока не заполняем)
1. Знаю
2. Хочу знать
- …
- …
3. Узнал (рефлексия)
- Что?
- Как ?
- Почему?
 X1 + X2 8. Какие величины контролируются при пуске момента и тока? 9. Каким поддерживается мощность при разгоне двигателя? 10. Во сколько раз пусковой ток превышает номинальный при пуске через пусковой реостат? 11. Каким должно быть сопротивление пускового реостата в начальный момент пуска? 12. Что происходит в работе пускового реостата по мере разгона? 13. На какой режим работы выбирают пусковой реостат? 14. Как увеличить плавность пуска асинхронного двигателя с фазным ротором? 15. Чем характеризуется пуск непосредственным включением в сеть? К чему это может привести? 16. Для двигателя какой мощности используется пуск непосредственным включением в сеть? " width="640"
X1 + X2 8. Какие величины контролируются при пуске момента и тока? 9. Каким поддерживается мощность при разгоне двигателя? 10. Во сколько раз пусковой ток превышает номинальный при пуске через пусковой реостат? 11. Каким должно быть сопротивление пускового реостата в начальный момент пуска? 12. Что происходит в работе пускового реостата по мере разгона? 13. На какой режим работы выбирают пусковой реостат? 14. Как увеличить плавность пуска асинхронного двигателя с фазным ротором? 15. Чем характеризуется пуск непосредственным включением в сеть? К чему это может привести? 16. Для двигателя какой мощности используется пуск непосредственным включением в сеть? " width="640"
Фронтальный опрос по контрольным вопросам
1 . Какие свойства асинхронного двигателя являются пусковыми?
2. Что показывает перегрузочная способность? Каким обычно бывает значение перегрузочной способности?
3. Что показывает кратность пускового тока?
4. Какие обычно значения имеет кратность пускового тока?
5. При пуске какого двигателя используется пусковой реостат?
6. Куда подключается пусковой реостат?
7. Исходя из какого условия выбирается величина сопротивления в цепи ротора. R2 X1 + X2
8. Какие величины контролируются при пуске момента и тока?
9. Каким поддерживается мощность при разгоне двигателя?
10. Во сколько раз пусковой ток превышает номинальный при пуске через пусковой реостат?
11. Каким должно быть сопротивление пускового реостата в начальный момент пуска?
12. Что происходит в работе пускового реостата по мере разгона?
13. На какой режим работы выбирают пусковой реостат?
14. Как увеличить плавность пуска асинхронного двигателя с фазным ротором?
15. Чем характеризуется пуск непосредственным включением в сеть? К чему это может привести?
16. Для двигателя какой мощности используется пуск непосредственным включением в сеть?
Продолжение опроса
17. В чем достоинства пуска двигателя непосредственным включением в сеть?
18. При каких условиях допускается пуск непосредственным включением в сеть?
19. Какие условия пуска надо учитывать при непосредственном включении в сеть ?
20. Какие способы пуска асинхронного двигателя применяются?
21. Что объединяет эти виды пусков?
23. Основные этапы пуска переключением со звезды на на треугольник.
24. Как изменяется напряжение при переключении обмотки на звезду?
25. Как при этом изменяется фазный и линейный ток?
26. Можем ли мы применять такой способ пуска при больших перегрузках?
27. В чем заключается пуск через реостаты? Чем завершается пуск?
29. Как изменится при этом напряжение?
30. Как изменится момент при пуске через реостат?
31. В чем особенность пуска через автотрансформатор? Какое напряжение подводится на ступенчатом пуске?
32. Как измениться пусковой ток двигателя ( на входе автотрансформатора)?
33. Как измениться ток в питающей сети?
Регулирование частоты вращения асинхронных двигателей
Частота вращения ротора асинхронного двигателя
Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой-либо из трех величин:
1) скольжения s ,
2) частоты тока в обмотке статора f 1
3) числа полюсов 2р в обмотке статора асинхронного двигателя
Регулирование частоты вращения изменением скольжения s возможно тремя способами:
- изменением подводимого к обмотке статора напряжения,
- нарушением симметрии этого напряжения
- изменением активного сопротивления в цепи ротора .
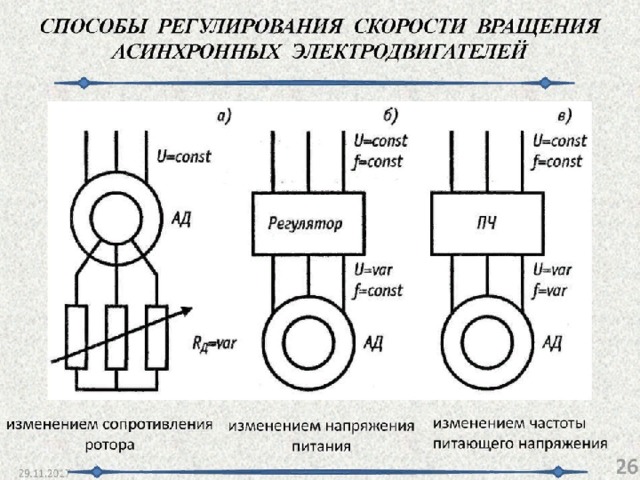
Регулирование частоты вращения изменением частоты тока в статоре.
- Этот способ регулирования (частотное регулирование) основан на изменении синхронной частоты вращения п1 = f 160/ p .
- Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой. В качестве таких источников могут применяться электромашинные, ионные или полупроводниковые преобразователи частоты (ПЧ).
- Чтобы регулировать частоту вращения, достаточно изменить частоту тока f 1. Но с изменением частоты f 1=ω1р/2π будет изменяться и максимальный момент. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f 1 изменять и напряжение питания U 1.
- Если частота вращения двигателя регулируется при условии постоянства момента нагрузки
- то подводимое к двигателю напряжение необходимо изменять пропорционально изменению частоты тока
- При этом мощность двигателя увеличивается пропорционально нарастанию частоты вращения. Если же регулирование производится при условии постоянства мощности двигателя Р ЭМ= const , то подводимое напряжение следует изменять в соответствии с законом
Частотное регулирование двигателей
- позволяет плавно изменять частоту вращения в широком диапазоне (до 12 : 1);
- удорожают установку;
- применялось в основном для одновременного регулирования группы двигателей, работающих в одинаковых условиях (например, рольганговых двигателей);
- благодаря развитию силовой полупроводниковой техники устройства частотного регулирования асинхронными двигателями позволяют применять их для индивидуального регулирования асинхронными двигателями;
- использование асинхронных двигателей, укомплектованных такими устройствами для частотного регулирования;
- наиболее целесообразно в пожаро- и взрывоопасных средах
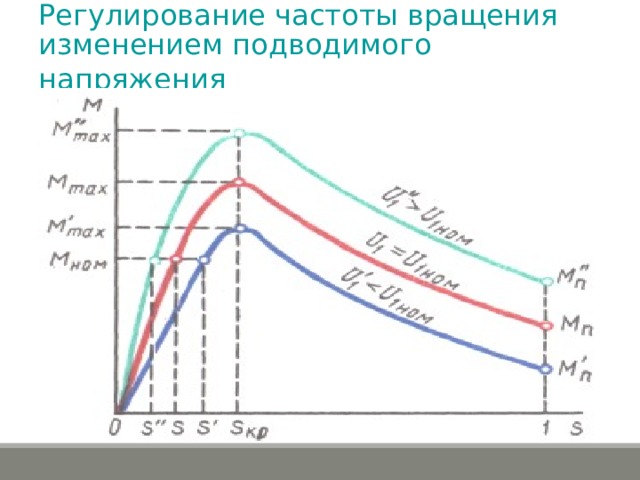
Регулирование частоты вращения изменением подводимого напряжения
- В то же время с уменьшением напряжения U 1 двигатель утрачивает перегрузочную способность , которая, как известно, пропорциональна квадрату напряжения сети
- Подводимое к двигателю напряжение изменяют либо регулировочным автотрансформатором, либо реакторами, включаемыми в разрыв линейных проводов.
- Узкий диапазон регулирования и неэкономичность (необходимость в дополнительных устройствах) ограничивают область применения этого способа регулирования частоты вращения.
Регулирование частоты вращения нарушением симметрии подводимого напряжения.
- При нарушении симметрии подводимой к двигателю трехфазной системы напряжения вращающееся поле статора становится эллиптическим .
- При этом поле приобретает обратную составляющую (встречное поле), которая создает момент Мобр, направленный встречно вращающему моменту Мпр.
- В итоге результирующий электромагнитный момент двигателя уменьшается

Механическая характеристика двигателя при регулировании частоты вращения нарушением симметрии подводимого трехфазного напряжения располагаются в зоне между характеристикой при симметричном трехфазном напряжении кривая 1 и при однофазном питании двигателя кривая 2
- Для регулировки несимметрии подводимого напряжения можно в цепь одной из фаз включить однофазный регулировочный автотрансформатор ( AT ) При уменьшении напряжения на выходе AT несимметрия увеличивается и частота вращения ротора уменьшается.
- Недостатками этого способа регулирования являются узкая зона регулирования и уменьшение КПД двигателя по мере увеличения несимметрии напряжения.
- Обычно этот способ регулирования частоты вращения применяют лишь в двигателях малой мощности.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора .
- Этот способ регулирования частоты вращения возможен лишь в двигателях с фазным ротором Механические характеристики асинхронного двигателя, построенные для различных значений активного сопротивления цепи ротора , показывают, что с увеличением активного сопротивления ротора возрастает скольжение, соответствующее заданному нагрузочному моменту. Частота вращения двигателя при этом уменьшается.
- Зависимость скольжения (частоты вращения) от активного сопротивления цепи ротора выражается формулой:
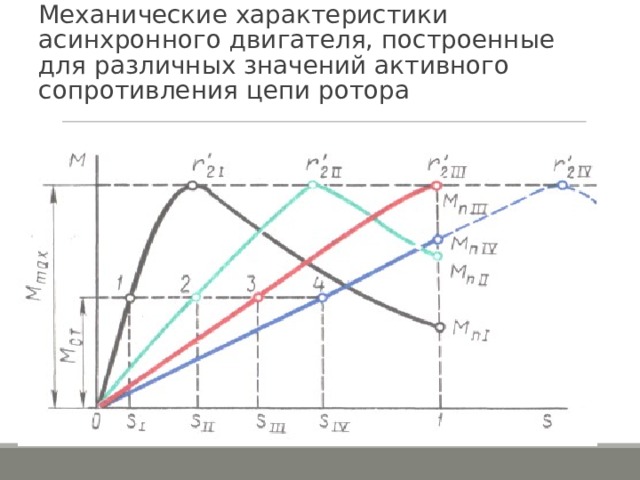
Механические характеристики асинхронного двигателя, построенные для различных значений активного сопротивления цепи ротора
- Практически изменение активного сопротивления цепи ротора достигается включением в цепь ротора регулировочного реостата (РР), подобного пусковому реостату (ПР) рассчитанного на длительный режим работы.
- Электрические потери в роторе пропорциональны скольжению поэтому уменьшение частоты вращения (увеличение скольжения) сопровождается ростом электрических потерь в цепи ротора и снижением КПД двигателя. Это свидетельствует о неэкономичности рассматриваемого способа регулирования.
- рост потерь в роторе сопровождается ухудшением условий вентиляции из-за снижения частоты вращения, что приводит к перегреву двигателя .
Решить задачу
Найти сопротивление, включаемое в цепь фазного ротора шестиполюсного полюсного асинхронного двигателя и необходимое для получения при номинальном вращающем моменте частоты вращения n =700об/мин, если известны номинальная частота вращения n ном =950 об/мин и сопротивление обмотки ротора R=0,08 Ом.
- Найти сопротивление, включаемое в цепь фазного ротора шестиполюсного полюсного асинхронного двигателя и необходимое для получения при номинальном вращающем моменте частоты вращения n =700об/мин, если известны номинальная частота вращения n ном =950 об/мин и сопротивление обмотки ротора R=0,08 Ом.
Рассматриваемый способ имеет недостаток : участок механической характеристики соответствующий устойчивой работе двигателя, при введении в цепь ротора добавочного сопротивления становится более пологим и изменения нагрузки сопровождаются значительными изменениями частоты вращения ротора Но несмотря на указанные недостатки, рассмотренный способ регулирования частоты вращения широко применяется в асинхронных двигателях с фазным ротором
Регулирование частоты вращения изменением числа полюсов обмотки статора.
Этот способ регулирования частоты вращения дает ступенчатую регулировку. Так, при
пар полюсов можно получить следующие синхронные частоты вращения :
:
Изменить число полюсов в обмотке статора можно
укладкой на статоре двух обмоток с разным числом полюсов
- укладкой на статоре одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов ( наибольшее применение. )
при последовательном согласном соединении двух катушек возбуждаемое или магнитное поле образует четыре полюса (рис. 15.12, а) при последовательном встречном (рис. 15.12, б) или параллельном соединениях (рис. 15.12, в) — два полюса .
Таким образом, принцип образования полюсно-переключаемой обмотки основан на том, что каждая фаза обмотки делится на части (катушечные группы), изменяя схему соединения которых получают разное число полюсов.
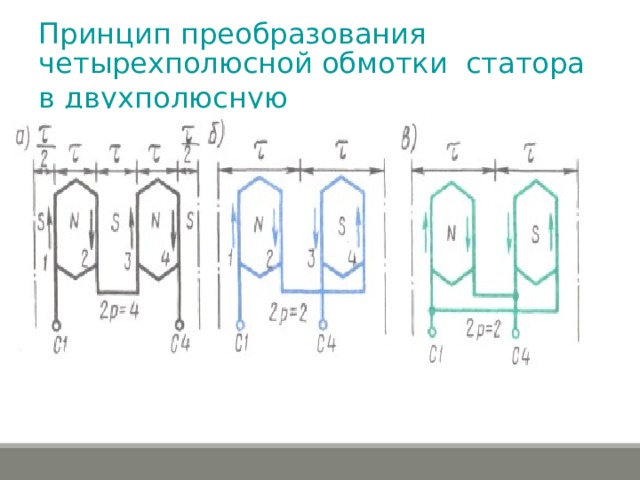
Принцип преобразования четырехполюсной обмотки статора в двухполюсную
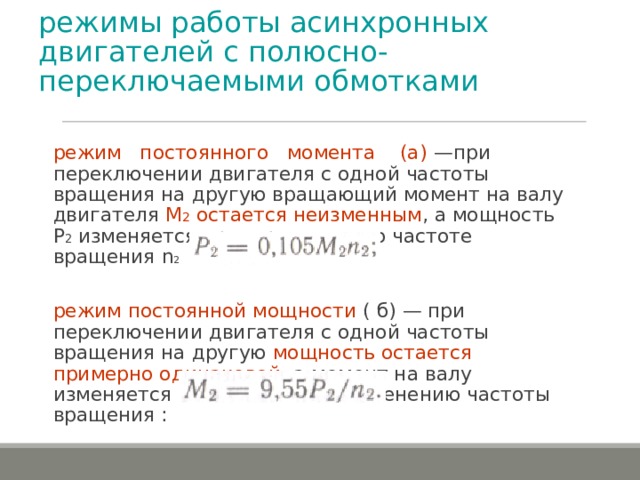
режимы работы асинхронных двигателей с полюсно-переключаемыми обмотками
- режим постоянного момента (a) —при переключении двигателя с одной частоты вращения на другую вращающий момент на валу двигателя М 2 остается неизменным , а мощность P 2 изменяется пропорционально частоте вращения n 2
- режим постоянной мощности ( б) — при переключении двигателя с одной частоты вращения на другую мощность остается примерно одинаковой , а момент на валу изменяется соответственно изменению частоты вращения :
- Если на статоре расположить две полюсно переключаемые обмотки, то получим четырехскоростной двигатель. Однако возможно применение и одной обмотки, допускающей путем переключения катушечных групп получение до четырех вариантов различных чисел полюсов. Например, асинхронный двигатель типа 4А180М12/8/6/4 имеет на статоре обмотку, допускающую переключение на 12, 8, 6, 4 полюса.
- Регулирование частоты вращения изменением числа полюсов на статоре применяют исключительно в асинхронных двигателях с короткозамкнутым ротором, так как число полюсов в обмотке этого ротора всегда равно числу полюсов статора и для изменения частоты вращения достаточно изменить число полюсов в обмотке статора.
- Сделайте вывод: что нового узнали сегодня на занятии? Чему научились …»? Запишите кратко: «Узнал: … Сделайте вывод: что нового узнали сегодня на занятии? Чему научились …»? Запишите кратко: «Узнал: … ( заполните третий столбик таблицы)













Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ





