
Россия, Симферополь


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 07.06.2025 09:55

Радина Наталья Александровна
Учитель технологии
71 год
Местоположение
Специализация
Презентация у уроку технологии "Функциональное разнообразие роботов".Технология. 6 класс.Е.С.Глозман
Категория:
Технология
04.04.2024 08:53

Просмотр содержимого документа
«Презентация у уроку технологии "Функциональное разнообразие роботов".Технология. 6 класс.Е.С.Глозман»
§ 52. Функциональное разнообразие роботов
Технология. 6 класс. Авторский коллектив: Е. С. Глозман, Е. Н. Кулакова, Ю. Л. Хотунцев, О. А. Кожина, И. В. Воронин, В. В. Воронина, А. Е. Глозман
Вспомните, любое ли управляемое устройство является роботом. Что представляет себе человек, когда звучит слово «робот»?
Все роботы можно разделить на две большие группы :
• стационарные роботы на фундаменте, которые обычно используются в промышленности, на линиях сборки и сварки кузовных деталей автомобилей;
• мобильные роботы , которые могут перемещаться и выполнять работу везде, куда смогут добраться.

Мобильные роботы различаются по способу передвижения: есть передвигающиеся на колёсах или гусеницах, шагающие, плавающие и летающие.
Роботы могут выполнять различные функции.
Промышленные роботы — это, как правило, мощные роботы-манипуляторы, установленные на неподвижном фундаменте, они способны выполнять действия в радиусе, равном длине их «руки». На конвейере их ставят несколько в ряд, и каждый выполняет определённые операции

Сборочная линия с промышленными роботами

Медицинские роботы используются для выполнения хирургических операций, при этом применяются системы дистанционного слежения
Использование медицинских роботов в хирургии

К медицинским роботам относятся экзоскелеты, которые помогают людям передвигаться
Люди, использующие экзоскелеты
Роботы могут быть использованы в качестве протезов рук.
Управлять электронными мышцами возможно уже сейчас, снимая датчиками сигналы с мышц человеческого тела. Наука, занимающаяся подобными проблемами, называется бионика.

Сельскохозяйственные роботы используются в растениеводстве и животноводстве. Они помогают кормить животных, удобрять и поливать растения, возделывать почву.
Роботы, используемые в растениеводстве
Работа таких роботов осложняется тем, что ими невозможно управлять дистанционно, по радиоканалу. Радиоволны очень плохо распространяются в водной среде, поэтому таких автономных роботов надо заранее тщательно программировать, чтобы они смогли выполнить поставленную задачу и вернуться на базу самостоятельно.

Первым космическим роботом можно считать луноход, отправленный на Луну ещё во времена СССР — в далёком 1970 году
Советский луноход
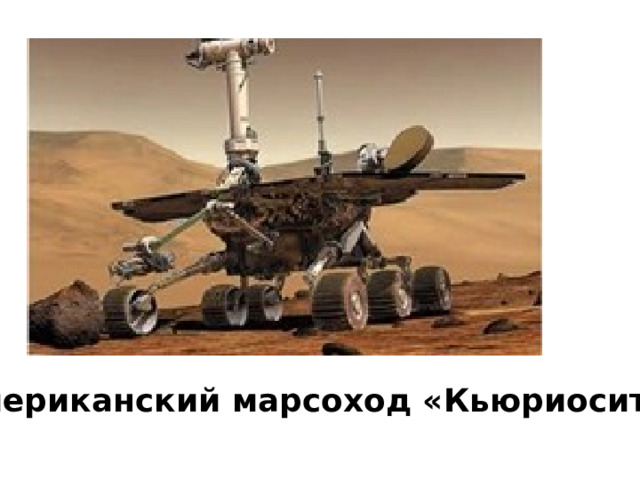
Американский марсоход «Кьюриосити»
В 2011 году американцами к Марсу был направлен робот «Кьюриосити», название которого переводится на русский язык как «любознательность». Для него была разработана специальная платформа на реактивных двигателях, которая, подлетев к поверхности Марса, «зависла» над ней, и марсоход очень бережно на лебёдке сам спустился с неё на поверхность.
Робот был отправлен и к комете Чурюмова—Герасименко. Он проводил исследования поверхности в точке высадки, брал пробы грунта и анализировал их прямо на месте, передавая на Землю в цифровом виде данные о составе почвы и поверхности, на которой он работал.
Сервисные роботы помогают нам в повседневной жизни.
К ним, например, относится робот-пылесос. В местах большого скопления людей используют роботы телеприсутствия, которые помогают сориентироваться, подсказывают, куда сейчас стоит сходить, и отвечают на вопросы посетителей.
Робот телеприсутствия
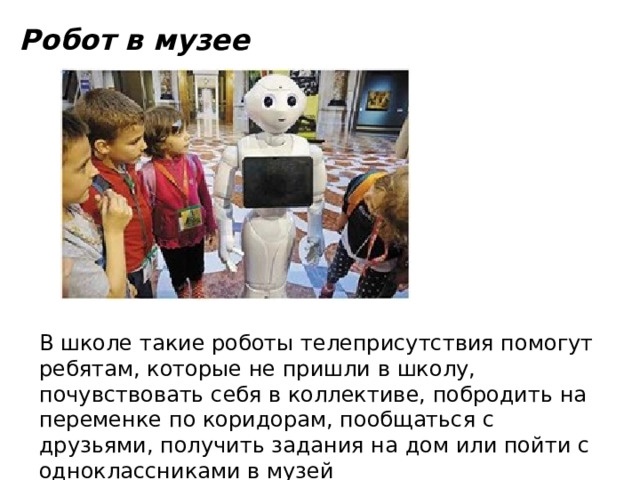
Робот в музее
В школе такие роботы телеприсутствия помогут ребятам, которые не пришли в школу, почувствовать себя в коллективе, побродить на переменке по коридорам, пообщаться с друзьями, получить задания на дом или пойти с одноклассниками в музей

Самым известным шагающим сервисным роботом является японский робот Асимо
Такие роботы уже используются в некоторых кафе как разносчики заказанной еды.
К сервисным роботам можно отнести систему круиз-контроля в автомобилях. Причём если раньше такие системы только поддерживали определённую скорость при движении по трассе, то сейчас появились значительно более умные системы круиз-контроля, которые определяют ещё и расстояние до идущего впереди автомобиля и позволяют двигаться со скоростью, задаваемой лидером в колонне.
Основные понятия и термины:
роботы: стационарные, мобильные, промышленные, медицинские, подводные, сельскохозяйственные, космические, сервисные, шагающие, круиз-контроль.
Вопросы и задания:
1. Какую систему классификации вы можете предложить для роботов?
2. Каких роботов целесообразно использовать для работы на конвейере автомобильного предприятия (шагающих, стационарных, мобильных)?
3. Какими должны быть подводные роботы: программно управляемыми (автономными) или дистанционно управляемыми? Почему?
4. Что можно считать первым космическим роботом? Какие ещё космические роботы вам известны?
Задание
Выберите один из типов роботов и подготовьте доклад о таких роботах.







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

