
Россия, Каменск-Шахтинский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 17.04.2026 10:21

Барышев Евгений Валентинович
педагог дополнительного образования
61 год
Местоположение
Специализация
«Применение сервопривода в робототехнике»
Категория:
Прочее
15.03.2026 18:54

Просмотр содержимого документа
««Применение сервопривода в робототехнике»»
Муниципальное бюджетное учреждение
дополнительного образования «Станция юных техников»
города Каменск-Шахтинский
- Применение сервопривода в робототехнике
- Методическая разработка
(Для учащихся робототехнических объединений учреждений дополнительного образования)
Автор: Барышев Е. В.
педагог дополнительного образования.
2026
Пояснительная записка.
Данная методическая разработка предназначена для ознакомления учащихся с сервоприводом. Содержание методической разработки содержит описание устройства и принципа работы сервопривода.
Методическая разработка является приложением к образовательной программе «Робототехника» и направлена на достижение следующих целей и задач:
Образовательные:
научить основным принципам работы сервопривода;
способствовать формированию знаний и умений в области механики.
Развивающие:
способствовать развитию креативности, нестандартного мышления в применении сервоприводов;
способствовать развитию творческих способностей, фантазии и эстетического вкуса.
Воспитывающие:
способствовать формированию потребности к осознанному использованию компьютерных технологий при обучении в школе и в повседневной жизни;
воспитание чувства взаимоуважения между кружковцами.
Введение
Под сервоприводом следует понимать такое устройство, которое обеспечивает возможность управления рабочим органом посредством обратной связи. Само название произошло от латинского servus, что в переводе означает помощник. Изначально сервопривод использовался в качестве вспомогательного оборудования для различных станков, машин и механизмов. Однако с развитием технологий и постоянно растущей необходимостью повышать точность электронных устройств им начали отводить куда более значимую роль.
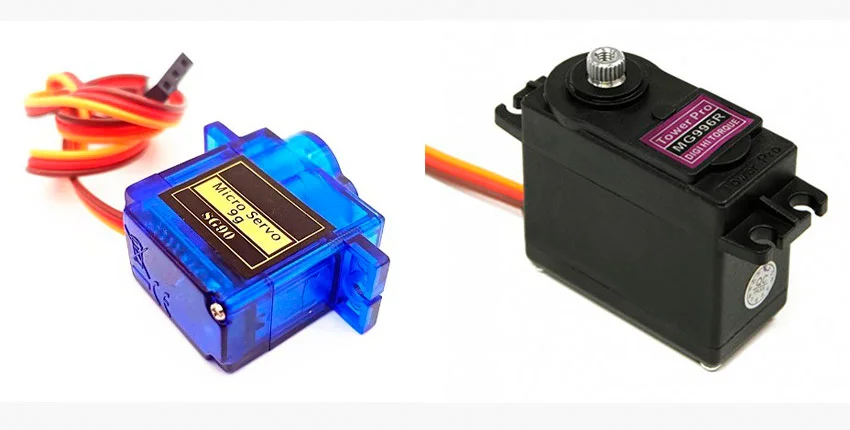
Рис.1. Виды сервоприводов.
Устройство и принцип работы

Рис. 2. Устройство сервопривода
Устройство и принцип работы каждого сервопривода может кардинально отличаться от других моделей. Однако в качестве примера мы рассмотрим наиболее актуальные варианты.
Конструктивно он может состоять из:
Привода – устройства, приводящего в движение рабочий орган. Может выполняться посредством синхронного или асинхронного двигателя, пневмоцилиндра и т.д.
Передаточный механизм – система шестеренчатой кривошипной или другой передачи, редуктор.
Рабочий элемент – управляет перемещением в пространстве, непосредственно вал редуктора, передаточный механизм и т.д.
Датчик – сигнализирует о достигнутом положении и передает информацию по каналу обратной связи.
Блок питания – может применяться в случае прямого подключения сервопривода к сети, где требуется преобразование уровня и типа напряжения.
Блок управления – осуществляет подачу управляющих сигналов на сервомотор для передвижения или корректировки места положения. Для этого применяются микропроцессоры, микроконтроллеры и т.д. К примеру, очень популярна плата Arduino.
Принцип действия заключается в подаче управляющего импульса на асинхронный или синхронный двигатель, который начинает вращаться, пока рабочий орган не окажется в нужной позиции. Как только будет достигнуто установленное положение, на датчике обратной связи появится нужный сигнал, который, перейдя на блок управления, прекратит питание электромеханического устройства. Движение сервопривода прекратится до появления новых электрических сигналов.
Далее начнется новый цикл работы устройства, число команд и последовательность их выполнения определяется заложенной программой.
Сравнение с шаговым двигателем
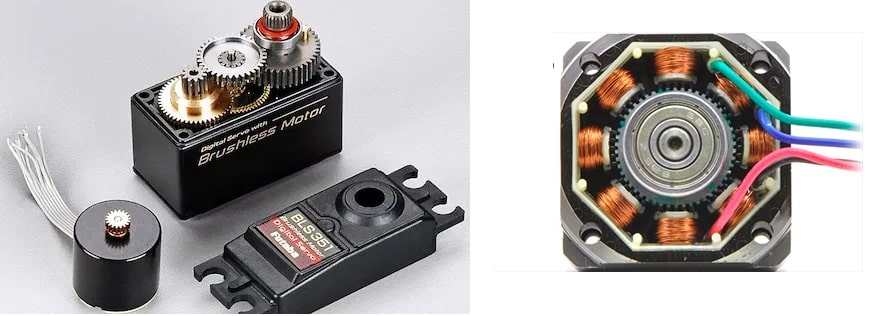
Рис. 3. Сравнение с сервопривода с шаговым двигателем
Вполне вероятно вы могли слышать, что та же функция часто выполняется шаговыми двигателями, однако между этими двумя устройствами имеется существенное отличие. Шаговый привод действительно осуществляет точное позиционирование объекта за счет четкого числа подаваемых на электрическую машину импульсов, они достаточно тихоходны и не создают лишнего шума. В остальном сервоприводы обладают рядом весомых преимуществ по сравнению с шаговыми электродвигателями:
Могут использовать для привода любой тип электрической машины – синхронный, асинхронный, электродвигатель постоянного тока и т.д.
Точность механического привода не зависит от износа деталей, появления люфтов, термических и механических изменений конструктивных элементов.
Диагностирование неисправностей происходит моментально за счет обратной связи.
Скорость вращения – любой обычный электродвигатель вращается быстрее шагового привода.
Экономичность – вращение вала у шаговой электрической машины осуществляется при максимально допустимом напряжении питания, чтобы обеспечить максимальный момент.
Но кроме перечисленных преимуществ есть ряд позиций, по которым сервопривод уступает шаговому двигателю:
Сложность системы управления и необходимость реализации ее работы – шаговый двигатель контролируется обычным счетчиком числа импульсов.
Необходимость контролировать как частоту вращения, так и принимать меры для принудительного затормаживания в нужной точке – это приводит к дополнительным затратам энергии, программных и механических ресурсов.
Обязательно используется дополнительный измерительный блок, контролирующий положение рабочего органа.
Сервопривод обладает значительно большей стоимостью, поэтому применение шагового двигателя обходится дешевле.
Применение
Сервоприводы малой мощности используют в областях:
Моделизм. Здесь их используют в радиоуправляемых моделях для управления рулевым управлением, газом и тормозом.
Автомобильная промышленность. Управляемые приводы используются в автомобилях для управления зеркалами, окнами, дверями и другими устройствами.
Робототехника. Управление движениями роботов, механизмов и других элементов.
Медицинская техника. Приводы применимы в медицинском оборудовании, для точного управления движением подвижными элементами оборудования и инструментов.
Промышленные автоматизированные системы. Здесь они применимы для управления движением элементов: конвейеров, роботов-манипуляторов и иного оборудования.
Электроника и робототехника для дома. Сервомоторы постоянного тока используются в устройствах для дома: в роботах-пылесосах, игрушках, устройствах для управления бытовой технике.
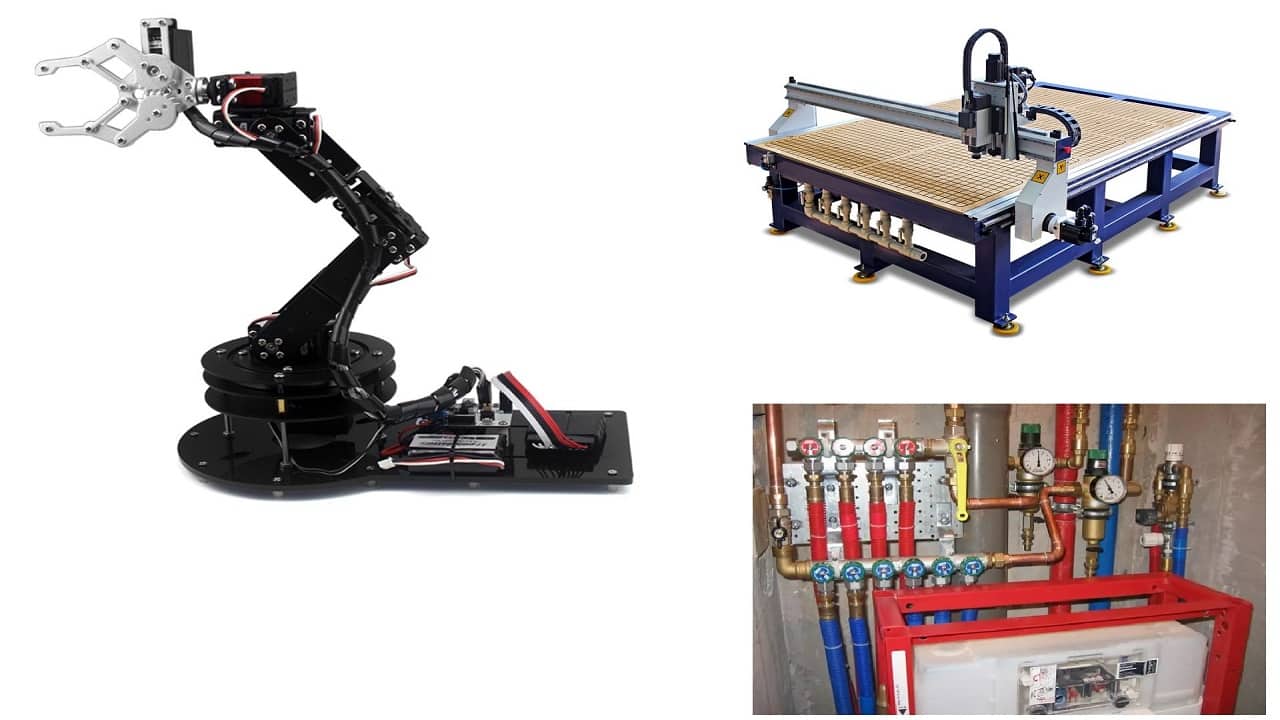
Рис. 4. Область применения
Сервопривод используется в самых различных направлениях науки и техники, где электрический привод, помимо функции вращения каких-либо элементов, должен выполнить и точное позиционирование. На практике они повсеместно используются в ЧПУ станках, автоматических задвижках, электронных клапанах, заводских станках с программным управлением, робототехнике.
В бытовых системах сервомоторы устанавливаются в системах отопления для регулировки подачи теплоносителя, топлива, управления нагревательным элементом, контроля переключения между центральными и автономными системами энергетических ресурсов и т.д. В автомобилях их используют для отпирания, запирания багажника, электронных блокировок.
Разновидности
За счет многолетнего развития сервоприводов сегодня можно встретить самые различные виды устройства. Поэтому мы рассмотрим наиболее распространенные критерии разделения.
По типу привода:
асинхронные сервоприводы – получаются дешевле, чем с синхронным электродвигателем, могут обеспечить точность даже при низких оборотах выходного вала;
синхронные – более дорогой вариант, но быстрее разгоняется, что повышает скорость выполнения операций;
линейные – не используют классических электрических моторов, но способны развивать большое ускорение.
По принципу действия выделяют:
электромеханический сервопривод – движение обеспечивается электрической машиной и шестеренчатым редуктором;
гидромеханический серводвигатель – движение осуществляется при помощи поршневого цилиндра, обладают значительно большей скоростью перемещения;
По материалу передаточного механизма:
полимерные – износоустойчивые и легкие, но плохо переносят большие механические нагрузки;
металлические – наиболее тяжелый вариант, относительно быстро изнашиваются, но могут выдерживать любые нагрузки;
карбоновые – имеют средние характеристики по прочности и износоустойчивости, в сравнении с двумя предыдущими, но имеют более высокую стоимость.

Рис. 5. По материалу шестерней
По типу вала двигателя:
с монолитным ротором – тяжелые сервоприводы, создают вибрацию при вращении;
с полым ротором – самые легкие модели, быстро реагируют на команды и набирают обороты, их легче контролировать;
с бесколлекторным ротором – не имеют подвижных контактов, которые создают дополнительное сопротивление вращению, наиболее дорогой вариант.

Рис. 6. По типу вала
Технические характеристики
При выборе конкретной модели сервопривода необходимо руководствоваться основными техническими параметрами, которые изготовитель указывает в паспорте устройства.
Наиболее значимыми характеристиками сервомотора являются:
Усилие на валу серводвигателя – определяет механический момент и способность перемещать определенный вес, создавать усилие при резке, фрезеровке и т.д.
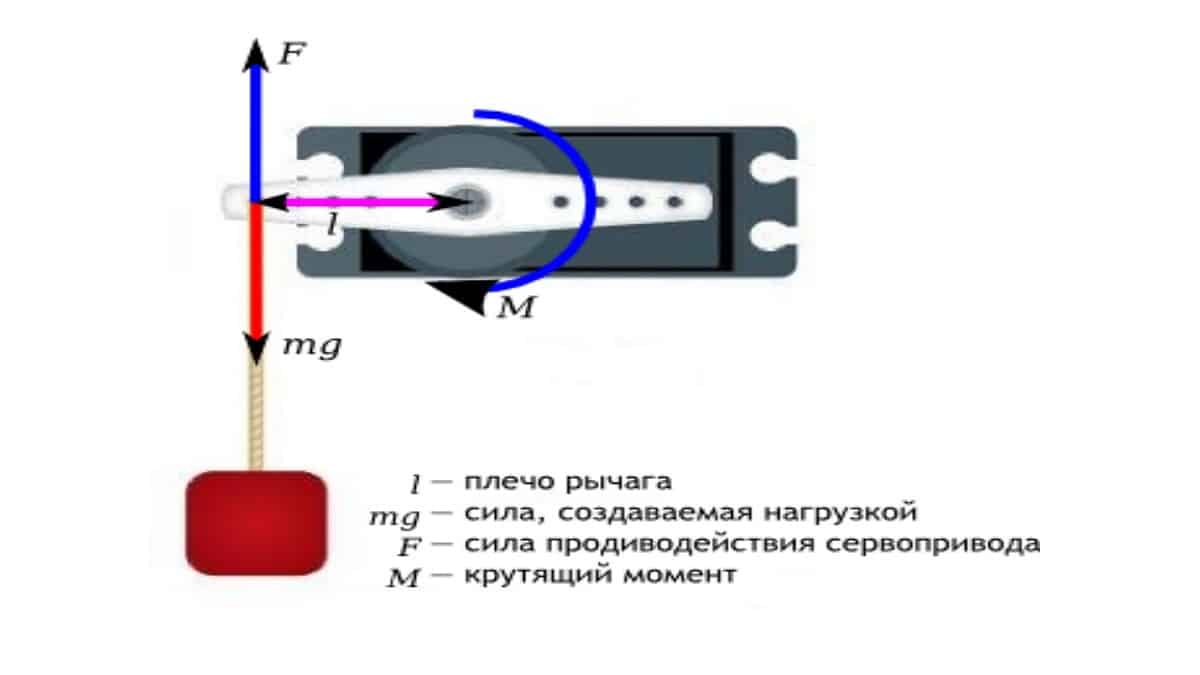
Рис. 7. Усилие на валу
Скорость вращения – показывает, сколько поворотов вала может совершить устройство за единицу времени.
Величина питающего напряжения – чаще всего электроснабжение сервопривода выполняется постоянным током, хотя встречаются модели и с переменным током выходного напряжения. Подключение питания к сервоприводу осуществляется тремя проводами: питающим, управляющим и общим.
Угол вращения сервопривода – поворот выходного элемента, как правило, выпускается на 180° и 360°.
Скорость поворота – подразделяется на сервоприводы с постоянным вращением и с переменной частотой.
Способы управления
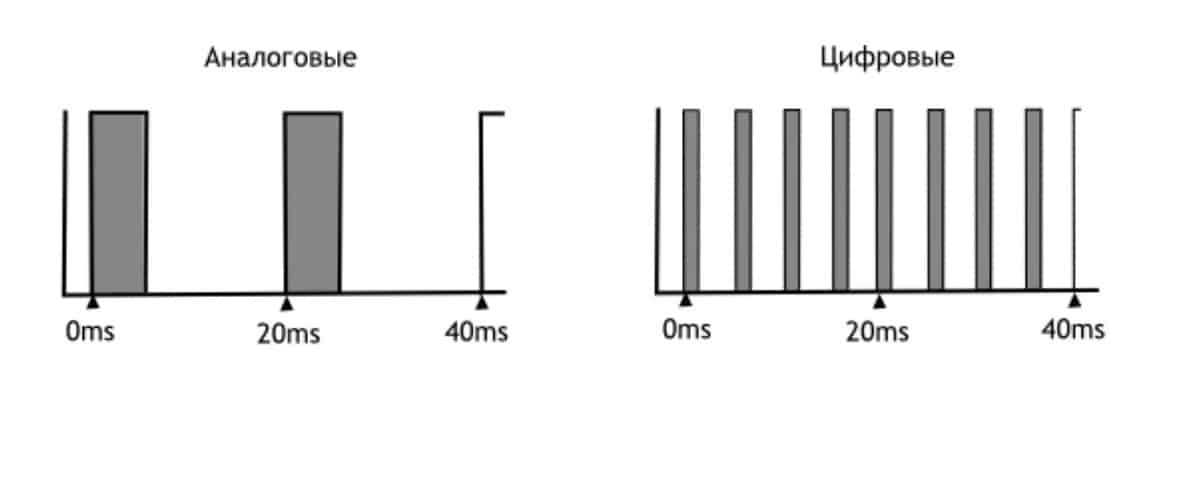
Рис. 8. Способ управления сервоприводом
По способу управления могут быть аналоговые или цифровые сервоприводы, первый из них подает сигналы с разной частотой, которая задается специальной микросхемой, контролирующей работу устройства. Цифровые сервоприводы, в свою очередь, отличаются наличием процессора, который принимает команды и реализует их в качестве различных режимов работы на приводе.
Их практическое отличие заключается в наличии мертвых зон у аналоговых способов, цифровые лишены этого недостатка, к тому же они быстрее реагируют на изменения и обладают большей точностью. Однако цифровой способ управления имеет большую себестоимость и на свою работу он расходует больше электроэнергии.
На рисунке 9 приведен пример управления сервоприводом с помощью подаваемых импульсов:
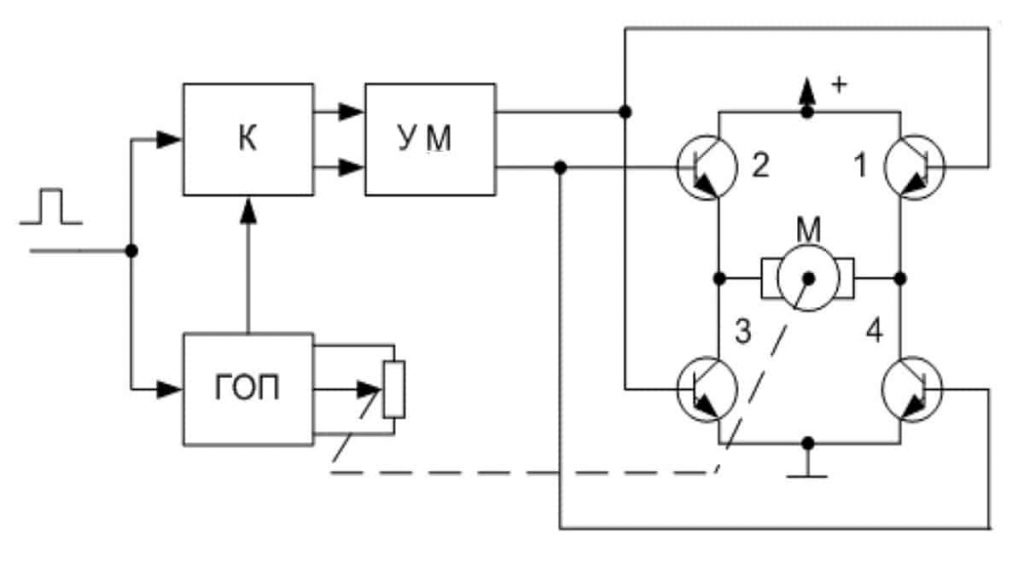
Рис. 9. Схема управления сервоприводом
Как видите на рисунке, сигнал поступает к генератору опорных импульсов (ГОП), подключенному к потенциометру. Далее сигнал поступает на компаратор (К), сравнивающий величины на выходе схемы и поступающие от датчика на рабочем органе. После этого прибор управления мостом (УМ) открывает нужную пару транзисторов моста для вращения вала мотора (М) по часовой или против часовой стрелки, также может задавать усилие за счет полного или частичного открытия перехода.
Управление сервоприводом
Библиотека Servo
Библиотека для сервопривода содержит набор дополнительных команд, позволяющих написать программу в упрощенном виде.
Уже созданы программы для разных целей. Необходимые библиотеки можно посмотреть по ссылке: https://www.arduino.cc/reference/en/libraries/.
На платах Arduino за исключением модели Arduino Mega обращение к библиотеке отключает функцию analogWrite (PWM) на пинах 9 и 10. На платах Arduino Mega можно подключить до 12 сервомоторов без отключения функции PWM.
#include
Servo myservo; // создаем объект класса Servo
void setup()
{
myservo.attach(9); // устанавливаем привод на пин 9
}
void loop()
{
myservo.write(90); // поворачиваем сервомотор на угол 90 градусов
delay(1000); // ждем одну секунду
myservo.write(0); // поворачиваем сервомотор на угол 0 градусов
delay(1000); // ждем одну секунду
}
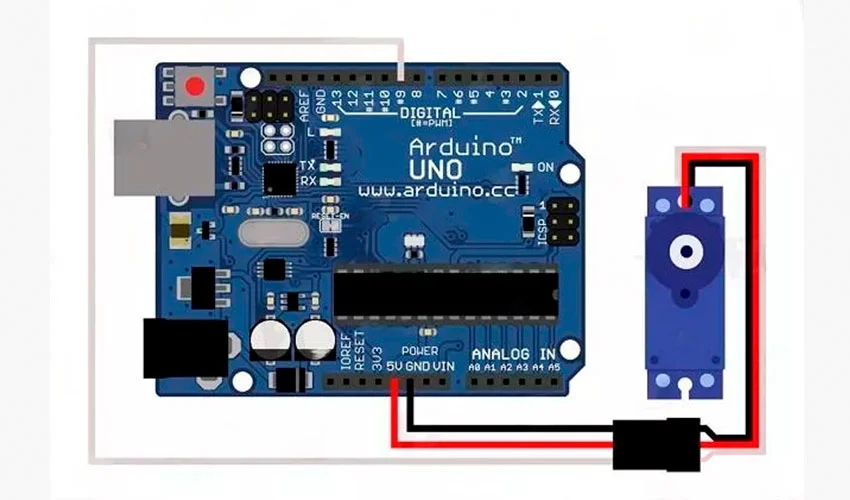
Рис. 10. Схема подключения к Arduino Uno
7








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

