Россия, Ахматово

СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 08.05.2026 07:36

Кашкин Александр Валерьевич
учитель математики
60 лет
Местоположение
Специализация
Проект "Игры для роботов"
Категория:
Внеурочка
09.10.2022 16:30

Просмотр содержимого документа
«Проект "Игры для роботов"»
| Муниципальное бюджетное общеобразовательное учреждение «Ахматовская средняя общеобразовательная школа» Алатырского района Чувашской Республики
«Игры для роботов» («РобоБоулинг», «РобоСквош»).
Выполнили: Чирков Алексей, ученик 7-го класса МБОУ «Ахматовская СОШ» Алатырского района ЧР, Федоров Илья, ученик 6-го класса МБОУ «Ахматовская СОШ» Алатырского района ЧР.
Научный руководитель: Кашкин А.В., учитель математики и информатики МБОУ «Ахматовская СОШ» Алатырского района ЧР.
с. Ахматово 2018
|
Введение
Обоснование выбора темыПоявление в школе комплектов Робототехники LEGO Mindstorms NXT нас очень заинтересовало. Это не просто детская игра, а целая наука, объединяющая в себя физику, математику, информатику, английский. Мы решили изучить данную науку, чтобы воплощать в роботах свои фантазии. Активно участвовать в муниципальных и республиканских соревнованиях по робототехнике.
АктуальностьРобототехника быстро становится неотъемлемой частью учебного процесса, она легко вписывается в школьную программу обучения по техническим предметам. Ключевые опыты в физике и математике можно наглядно показать с помощью LEGO роботов.
Робототехника поощряет мыслить творчески, анализировать ситуацию и применять критическое мышление для решения реальных проблем. Работа в команде и сотрудничество укрепляет коллектив, а соперничество на соревнованиях дает стимул к учебе. Возможность делать и исправлять ошибки в работе самостоятельно заставляет школьников находить решения без потери уважения среди сверстников. Робот не ставит оценок и не дает домашних заданий, но заставляет работать умственно и постоянно.
Различные языки программирования графическими элементами помогают школьникам мыслить логически и рассматривать вариантность действия робота. Обработка информации с помощью датчиков и настройка датчиков дают школьникам представление о различных вариантах понимания и восприятия мира живыми системами.
Цель проекта:Создание роботов для соревнований «РобоКарусель» на республиканском этапе по робототехнике «РобоФест-2018» в г. Чебоксары для учащихся 7-9 класов.
Задачи проекта:познакомиться с конструктором LEGO NXT
изучить основы программирования в среде LEGO MINDSTORMS NXT 2.0
сконструировать модель робота
создать программу для управления роботом
испытать полученного робота
конструктор со средой программирования LEGO MINDSTORMS NXT.
Гипотеза:робототехника позволяет воплощать в роботах свои фантазии.
Ожидаемые результатыумение программировать в среде LEGO MINDSTORMS NXT 2.0,
умение конструировать различные модели роботов,
заинтересованность обучающихся школы в изучении Робототехники.
1. Объяснительно-иллюстративный – предъявление информации различными способами (объяснение, рассказ, беседа, инструктаж, демонстрация, работа с литературой и др);
2. Эвристический – метод творческой деятельности (создание творческих моделей и т.д.);
3. Проблемный – постановка проблемы и самостоятельный поиск её решения;
4. Программированный – набор операций, которые необходимо выполнить в ходе выполнения практических работ (компьютерный практикум);
5. Репродуктивный – воспроизводство знаний и способов деятельности (собирание моделей и конструкций по образцу, упражнения по аналогу);
6. Частично-поисковый – решение проблемных задач с помощью педагога;
7. Поисковый – самостоятельное решение проблем.
Материальные ресурсы:конструктор с программным обеспечением Lego Mindstorms NXT – 2 набора,
АРМ ученика и учителя (компьютер, проектор, сканер, принтер)
Организационный этап (октябрь, ноябрь 2017г.) Знакомство с конструктором LEGO NXT и изучение основ программирования в среде LEGO MINDSTORMS NXT 2.0 Этап реализации проекта ( декабрь 2017 г., январь 2018 г.) Разработка механизма робота на основе конструктора LEGO NXT. Составление программы для управления роботом в среде LEGO MINDSTORMS NXT 2.0 тестирование модели робота, устранение дефектов и неисправностей. Заключительный этап (январь 2018 г.). Защита проекта. Демонстрация модели робота
Основная частьКонструирование роботов.
Наша задача была создать роботов, для игр «РобоБоулинг» и «РобоСквош». Первая игра заключается в том, что робот должен выехать из зоны старта, ударить по мячам ( 3 шт., за каждый удар даётся 10 балов). Если же робот сбивает банку (банка считается сбитой, если она сдвинулась на 2 см), даётся 10 балов. Если же робот вернулся в зону старта, ещё добавляется 10 балов. В итоги можно заработать всего 130 балов. При постройке такого робота использовались балки и соединительные втулки различной величины и формы, два сервермотора, программируемый микрокомпьютер NXT 2.0 и соединительные провода. Для увеличения скорости использовали шестерёнки, по две на каждое колесо. В конструкции робота нужно было правильно подойти: к увеличению скорости, так как удар по мячу должен быть на столько сильным чтобы мяч мог сдвинуть банки. В конструкции робота должны были учитывать то, что робот должен точно подъехать к мячу и вернутся назад, в зону старта.
При конструировании второго робота использовались те же детали, только добавился ещё один двигатель, за счёт которого осуществлялся удар по шарику. К двигателю крепилась ракетка, составленная из балок. Вторая игра заключается в том, что робот должен выехать из зоны старта, подъехать к мячу таким образом, чтобы робот смог осуществить удар по шарику (10 балов), если шар попадает в дальнюю стенку робот получает 5 балов, если же в боковую 2 балла. Поэтому нужно осуществлять подъезд таким образом, чтобы при ударе шарик смог попасть сразу в три стенки. Тогда робот заработает 19 баллов.
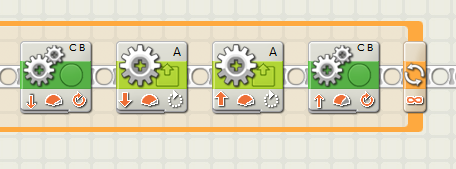
Программирование робота.
Программирования робота проводилось в среде программирования NXT 2.0, на моноблоке. Для разработки программы был применён линейный алгоритм. Он был составлен из блоков движения, которые управляли двигателями, которые осуществляли движение робота и удар ракеткой по шарику. В результате такого программирования мы получили программу: (смотри приложение 1).
Тестирование робота.
Для тестирования было изготовлено два игровых поля. Их размеры и виды линий совпадали с размерами и видами линий, которые используются на соревнованиях по робототехнике. (смотри приложение 3). В результате тестирования программ были сделаны выводы: подъезд робота должен быть таким, чтобы после удара шарик ударился о боковую стенку под таким углом, чтобы смог отскочить к дальней стенки, а от неё к другой боковой.
Реализация проектаНа ступени реализации организационного этапа мы изучили:
основные компоненты конструкторов LEGO;
конструктивные особенности различных моделей, сооружений и механизмов;
компьютерную среду, включающую в себя графический язык программирования;
виды подвижных и неподвижных соединений в конструкторе;
основные приемы конструирования роботов;
конструктивные особенности различных роботов;
как передавать программы в NXT;
как использовать созданные программы;
приемы и опыт конструирования с использованием специальных элементов, и других объектов и т.д.).
В ходе реализации проекта у нас сформировались умения и навыки: 1)самостоятельно решать технические задачи в процессе конструирования роботов (планирование предстоящих действий, самоконтроль, применять полученные знания, приемы и опыт конструирования с использованием специальных элементов и т.д.); 2) создавать действующие модели роботов на основе конструктора LEGO; 3) создавать программы на компьютере на основе компьютерной программы MINDSTORMS NXT 2.0; 3) передавать (загружать) программы в NXT; 4) корректировать программы при необходимости; 5) демонстрировать технические возможности роботов; 6) излагать логически правильно действие своей модели (проекта).
ВыводВ результате реализации проекта «Робот, движущийся по чёрной линии» у нас получилась модели роботов, которые можно успешно использовать на соревнованиях по робототехнике. Мы получили первые навыки программирования в среде LEGO MINDSTORMS NXT 2.0.
Библиографический список
Программное обеспечение MINDSTORMS NXT 2.0 .
Образовательная робототехника в дополнительном образовании школьников: рабочая тетрадь/ Гинзбург Е.Е., Винокурова А.В. – Йошкар-Ола: ОАНО «Инфосфера», 2011.
Филиппов С.А. Робототехника для детей и родителей. – СПб.: Наука, 2010, 195 стр.
http://lego.rkc-74.ru/
http://www.lego.com/education/
http://www.wroboto.org/
http://www.roboclub.ru/
http://robosport.ru/
http://www.prorobot.ru/
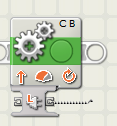
Приложение 1
Программа для «РобоБоулинга»


Приложение 2
Программа для «РобоСквош»

Приложение 3При

4








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

