
Россия, Троицк


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 18.05.2026 13:31

Ванзина Анастасия Дмитриевна
учитель начальных классов
23 года
Местоположение
Специализация
Проект "Разработка и изготовление модели робота-манипулятора"
Категория:
Начальные классы
25.08.2024 21:19

Просмотр содержимого документа
«Проект "Разработка и изготовление модели робота-манипулятора"»
Муниципальное бюджетное общеобразовательное учреждение "средняя общеобразовательная школа № 3"
Проект
Разработка и изготовление модели робота-манипулятора
Выполнил ученик 2 В класса
Алексеев Дмитрий
Руководитель:
Ванзина Анастасия Дмитриевна
учитель начальных классов
г. Троицк, 2024 г.
Содержание
Введение 3
1.Теоретическая часть 5
1.1.Обзор истории робототехники 5
1.2.Современные рабочие роботы и функции, которые они выполняют 7
2.Творческая часть проекта 9
2.1.Технологический процесс изготовления изделия 9
2.2.Выбор необходимых деталей и программного обеспечения 11
2.3.Последовательность сборки модели робота-манипулятора и его программирование 12
2.4.Экономическая оценка изделия 16
Заключение 17
Список литературы 18
Приложение 1 19
Приложение 2 20
Приложение 3 21
Приложение 4 22
Приложение 5 23
Приложение 6 24
Приложение 7 25
Приложение 8 26
Приложение 9 27
Приложение 10 28
Введение
Роботы – это механические помощники человека, способные выполнять какие-либо операции и действия. Когда-то они были фантастикой. На протяжении многих веков люди изобретали машины и механизмы, способные облегчить им жизнь, и современный человек уже не представляет свою жизнь без них.
Однажды на внеурочном занятии мы говорили о тяжелом труде людей на заводах и роли роботов в данной работе. Некоторые конструкции меня заинтересовали. Стало любопытно, возможно ли создать такого робота в домашних условиях. А интерес мой не случайный: я уже год посещаю кружок Lego в своей школе и полтора года увлекаюсь программированием на Uchi.ru.
Актуальность данной работы обусловлена необходимостью создания робота своими руками, которая будет хорошим наглядным пособием для уроков технологии, окружающего мира, внеурочных занятиях не только во 2 классе, но и в более старших классах при изучении механизмов и электротехнических устройств в технологических системах.
Проблема: возможно ли создание робота в домашних условиях. Все вышеизложенное и побудило выбрать тему проекта: Создание робота на основе конструктора Lego WeDo 2.0.
Целью данной работы является создание робота на основе конструктора Lego WeDo 2.0.
Объектом является конструктор Lego WeDo 2.0.
Предметом является принцип строения и работы робота на основе конструктора Lego WeDo 2.0.
В основу данной работы положена гипотеза, согласно которой, изучив принцип строения и работы робота на основе конструктора Lego WeDo 2.0, можно создать робота самостоятельно.
В соответствии с целью и гипотезой были поставлены следующие задачи:
изучить историю робототехники;
исследовать виды современных рабочих роботов и функции, которые они выполняют;
изучить принцип строения и работы робота на основе конструктора Lego WeDo 2.0 и среду его программирования;
создать робота на основе конструктора Lego WeDo 2.0.
С целью достижения поставленных задач нами был разработан комплекс взаимосвязанных методов, включающий:
анализ литературы и материалов сети Internet;
моделирование;
программирование.
- Теоретическая часть
- Обзор истории робототехники
Робототехника – это область науки и техники, связанная с созданием, исследованием и применением роботов.
Робот – это машина, которая воспринимает, мыслит и действует. При этом робот может, как иметь связь с человеком (получать от него команды), так и действовать автономно.
История робототехники неразрывно связана с большинством изобретений, сделанных человечеством. Практически невозможно отделить ее от истории развития науки, техники и тем более от истории возникновения и становления компьютерных технологий.
Еще с древних времен человек хотел создать такие механизмы, которые могли бы выполнять вместо людей тяжелую и вредную работу. Однако первые успехи в этом направлении появились только в середине 18 века.
Тогда популярность набирали домашние механические куклы, представленные в 1738 году французским ученым из Гренобля (город на юго-востоке Франции) Жаком де Викансон. Он представил публике искусственного музыканта, который мог исполнять на флейте 12 различных мелодий. Немного позже к флейте добавились барабан и бубен, таким образом, был создан целый механический.
Но де Викансон на том не остановился. За оркестром последовало действительно удивительное по тем временам изобретение – механическая утка .Она могла самостоятельно передвигаться, махать крыльями, крякать, вращать головой, есть и переваривать пищу. Утка не была игрушкой в обычном понимании этого слова: в каждом ее крыле было около 400 подвижных деталей. К сожалению, никто не знает, что случилось с оригиналом утки. Однако, в музее в Гренобле есть копия утки, созданная часовщиком.
Сегодняшняя робототехника сформировалась в 60-х годах 20 века. Изобретатели вложили много сил в разработку роботов-манипуляторов, но одним из самых важных изобретений стал робот Unimate (Юнимейт), созданный Джорджом Деволом и Джозефом Энгельбергером. Это был один из первых промышленных роботов, и представлял собой огромную конструкцию, похожую на человеческую руку. Приспособление могло складывать части горячего литого металла и сваривать части кузова. Робот был куплен и установлен на сборочном конвейере компании General Motors, чтобы уменьшить вероятность получения травм и смертей на производстве. В настоящее время Unimate находится в Зале славы (Питсбург, США).
В 1966 году был создан робот Shakey (шейки), который, по сути, был первым роботом, способным рассуждать. Шейки разрабатывался в Центре искусственного интеллекта при Стэнфордском исследовательском институте (ныне SRI International) с 1966 по 1972 под руководством Чарльза Росена.
- Современные рабочие роботы и функции, которые они выполняют
Современная робототехника полностью основана на компьютерных технологиях: без компьютеров роботы не смогли бы и десятой части того, что они могут. Сегодня роботов можно условно разделить на две категории: рабочие (т. е. роботы, сконструированные для служебных задач) и домашние.
Рассмотрим несколько видов рабочих роботов.
Промышленный робот – устройство (машина) с программным или дистанционным (с пульта) управлением, предназначенное для замены человека в производственных процессах. Промышленные роботы имеют перед человеком преимущество в скорости и точности реализации однообразных операций, они способны производить движения, какие человек физически выполнить не может. Применение современных промышленных роботов увеличивает производительность оборудования и выпуск продукции, улучшает качество продукции, помогает экономить материалы и энергию.
Медицинские роботы призваны автоматизировать труд врача и здравоохранения в целом. Работа в этой области помогла создать два уникальных направления в медицине. Первое направление — это телехирургия: хирург руководит роботом во время операции, непосредственно не контактируя с пациентом. Второе направление – это хирургия с минимальным вмешательством . Отдельное направление – это медицинские тренажеры – оборудование для профессиональной подготовки специалистов, призванное облегчить отработку практических навыков без риска для пациентов. Медицинские тренажеры имитируют функциональные или физические модели организма человека. С помощью тренажеров можно создавать подобие экстремальной обстановки. Есть возможность остановить процесс в любой момент, обсудить ситуацию, проанализировать действия. При многократной работе с тренажерами формируются необходимые навыки
Использование медицинских роботов повышает уровень автоматизации и облегчает труд врачей, уменьшает вероятности врачебных ошибок, ускоряет процессов возвращения пациентов к нормальному существованию после травм и заболеваний.
Роботы-манипуляторы широко применяются в промышленности для автоматизации многих технологических процессов при конвейерной сборке различных изделий (от автомобилей до микросхем), сварке, окраске, сверлении, перемещении тяжёлых грузов и т.д. Особое значение имеет применение роботов-манипуляторов при работе с вредными химическими веществами, при обезвреживании взрывных устройств, в кузнечных и литейных цехах, на цементных заводах, в помещениях с повышенным уровнем радиации, в условиях относительной недоступности (в морских глубинах, на космических аппаратах и орбитальных станциях) и т.д. Механические руки стали устанавливать там, куда доступ человека нежелателен, а сам он, управляющий руками, располагался в другом, безопасном помещении. Сейчас манипуляторы используют в разных производствах.
- Творческая часть проекта
- Технологический процесс изготовления изделия
После изучения теоретического материала я приступил к созданию своей модели.
Технологическая карта проекта
| № | Последовательность выполнения | Инструменты |
| 1. | Выбор продукта |
|
| 2. | Прогнозирование и планирование действий будущей модели |
|
| 3. | Изучить программное обеспечение Lego WeDo 2.0; найти и исследовать чертеж робота-манипулятора. | Программа Lego WeDo 2.0., методическое программное обеспечение |
| 4. | Подбор материала из конструктора и сборка робота. | Конструктор Lego WeDo 2.0. |
| 5. | Конструирование робота | Конструктор Lego WeDo 2.0. |
| 6. | Составление базовой (простой) программы действий робота-манипулятора с помощью программы Lego WeDo 2.0. | Программа Lego WeDo 2.0. |
| 7. | Дополнение и усложнение конструкции; усложнение действий. | Конструктор Lego WeDo 2.0; программа Lego WeDo 2.0. |
Конструктор Lego WeDo 2.0 имеет в своем наборе доступ к специальной программе, которая позволяет самостоятельно создавать модели по готовым схемам. Но третий этап вызвал у меня затруднения, поскольку желаемого не было.
Для решения сложившегося затруднения мы с руководителем изучили несколько схожих конструкций и пришли к той схеме, которая соответствовала нашим представлениям.
На первом этапе я выбрал свой будущий продукт. Я остановился на руке-манипуляторе.
На втором этапе определил, что это и как должно работать. Я составил техническое задание — это должен быть манипулятор, который мог бы захватывать легкие предметы.
Выбор необходимых деталей и программного обеспечения
На четвертом этапе начался подбор материала и инструментов. Для изготовления модели мне потребовалось следующее:
Конструктор Lego WeDo 2.0.
Программа Lego WeDo 2.0.
| № п/п | Наименование | Кол-во | Материал |
| 1. | Кирпичики и оси из конструктора Lego WeDo 2.0. | 1 | пластик |
| 2. | Дополнительные детали конструктора Lego WeDo 2.0. | 1 | пластик |
| 3. | Электронные компоненты из конструктора Lego WeDo 2.0. | 4 | Пластик, медь (в проводах) |
| 4. | Ноутбук (или смартфон) с программным обеспечением Lego WeDo 2.0. | 1 |
|
Последовательность сборки модели робота-манипулятора и его программирование
Самый ответственный этап – пятый – конструирование робота.
Работал я, опираясь на схему. Первый элемент – клешня (сама рука робота-манипулятора). Для этого мне понадобились 2 основы – балки 1х12. Именно на этих элементах началась сборка всех подвижных частей роботизированной клешни. Для этого использовалось несколько разноразмерных осей и зубчатых колес. Самым сложным в этот момент оказалось положение колес, поскольку их зубцы должны состыковываться. А также нужно было внимательно присоединять клешни захвата, потому что при неверном повороте, конструкции не была управляемой. Соблюдая все рекомендации руководителя, первую часть робота я успешно изготовил. (Приложение 1)
Приступаем к основе робота – присоединение и подключение электронных компонентов. Сначала я присоединил двигатель (или мотор) к клешне робота, который даст возможность ей двигаться. Но он будет бесполезен без «мозга» робота – смартхаба. Именно его мы присоединяем следующим. Именно он соединяет компьютер с датчиками и двигателями. Смартхаб получает программу придуманную и написанную для робота и выполняет её. Не забываем об эстетичности и безопасности. Чтобы провода двигателя и смартхаба не выделялись, закрепим их дополнительными деталями. (Приложение 2)
Не забываем об устойчивости модели. С помощью кирпичиков конструкторов собираем устойчивую конструкцию, которая также будет выполнять функцию поворота робота вокруг себя. Украшаем. (Приложение 3)
Модель готова.
Теперь мы можем выполнить шестой шаг - «оживить» нашего робота, или привести в движение. Для этого нам нужно написать программу.
Обращаю внимание, что расположение зубчатых колес на разработанной модели предполагает не только раскрытие-закрытие клешни, но и также поднятие и опускание роботизированной руки манипулятора.
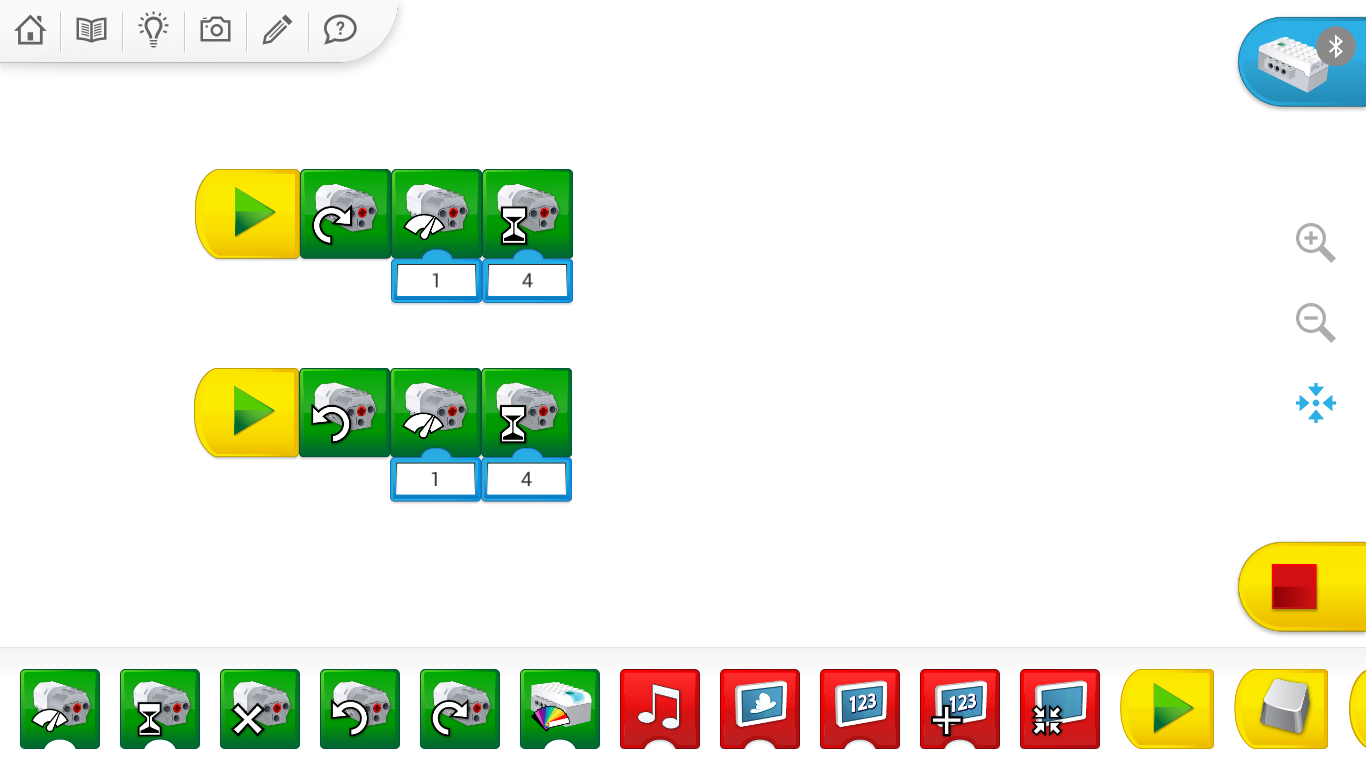
Для начала мы написали базовую (простую) программу, которая позволяет проверить работу робота-манипулятора. (Приложение 4)
Что она обозначает: по включению программы сигнал поступает в смартхаб, и от него идет дальше в двигатель. Двигатель начинает вращение с минимальной скоростью (1), клешни смыкаются, рука поднимается – это происходит за 4 секунды. Затем двигатель останавливается. Все это необходимо для того, чтобы наш двигатель не крутился бесконечно. Далее мы запускаем вторую часть данной программы, по итогу которой рука опустится, клешни разомкнутся – все это займет 4 секунды на минимальной скорости. Полностью автоматизированной данную программу не дает нам возможность сделать непредвиденная ошибка с кодом, которую в будущем я планирую изучить и устранить.
Но на этом наша работа не закончилась. Мы начинаем экспериментировать – это наш седьмой шаг - заключительный.
Чем уж и уникальны конструкторы для изучения робототехники, так это тем, что они позволяют не только работать по разработанной схеме, но и позволяет проявить воображение, провести эксперименты с деталями и программой.
Представим, что мы на производстве, например, на заводе сборки автомобилей. Именно на этом производстве роботы-манипуляторы имеют спрос. И вот слесарь-сборщик (именно он собирает различные машины, механизмы и аппараты) не может постоянно обращать внимание на программу, и да, мы не исключаем, что на производстве есть техник по обслуживанию роботизированного производства. Но представим, что нам необходимо более автоматизированная работа робота-манипулятора. А что в этом может нам помочь? Конечно же, дополнительны электронные элементы.
Первым делом попробуем создать пульт управления, который будет у нас «под рукой». Добавим в нашу конструкцию датчик наклона. Прикрепить его можно в любом удобном месте, но важно, чтобы он был подвижен. Для этого воспользуемся двумя кирпичиками: кирпичиком с 1 шариковым соединением и кирпичиком с шарико-подшипниковым креплением. На них установим датчик наклона. Теперь мы можем его поднимать и опускать. (Приложение 5)
Соответственно, изменяем программу. (Приложение 6)
Понаписанной программе можно увидеть, что действие будет зависеть от посылаемой команды датчиком наклона. Принцип работы двигателя сохраняются: минимальная скорость (1), время работы 4 секунды на действие. Если датчик направить вверх, то двигатель начинает вращение, клешни смыкаются, рука поднимается. Если опустим датчик - рука опустится, клешни разомкнуться. Цепочку команд мы зациклили для того, чтобы программа не нуждалась в нажатии кнопки, а активировалась при использовании датчика движения.
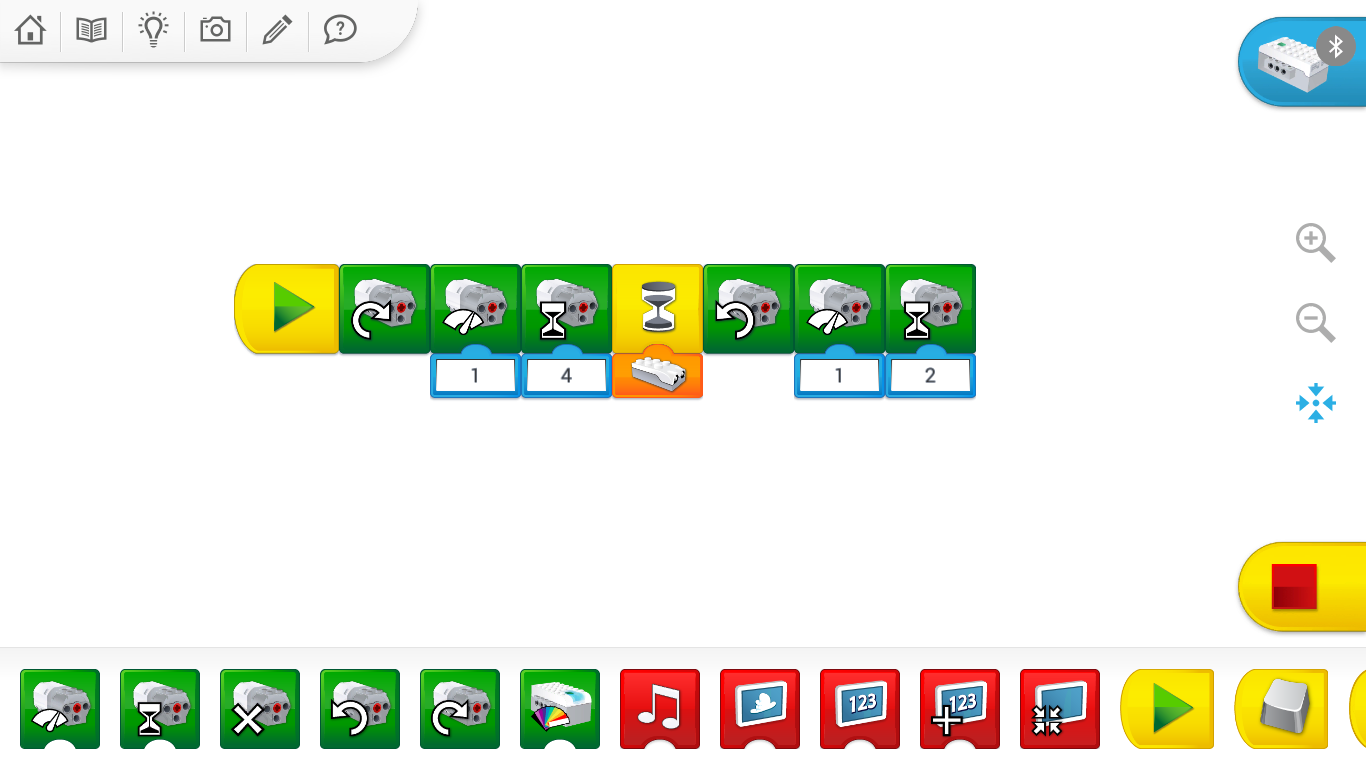
Но и на этом мы не закончим. В нашем наборе есть еще один электронный прибор – датчик расстояния (или датчик перемещения). Его можно расположить абсолютно в любом месте нашей конструкции (кроме конструкции руки). Он определяет перемещение предмета и расстояние от него, сам датчик перемещать не обязательно. (Приложение 7)
Программируем работу двигателя стандартно (минимальная скорость (1), время работы 4 секунды на действие). Сначала включим по программе: клешни смыкаются, рука поднимается. Ставим «песочные часы» - ожидание команды. После того как датчик перемещения определит движение перед собой, он отправит команду на обратное действие: рука опустится, клешни разомкнуться. Во время экспериментов выяснилось, что данный датчик в наборе достаточно мощный и улавливает малейшие колебания перед собой. Из-за этого фактора робот выходил из строя. Поэтому для чистоты эксперимента, если нам какое-то время не нужно опускать стрелу робота, данный датчик мы закрываем. (Приложение 8)
Возникает логический вопрос: «Можно ли тогда одновременно использовать оба датчика: датчик наклона и датчик перемещения?».
Теоретически возможно. Мы даже попытались написать программу данной работы. (Приложение 9)
К примеру, мы получаем команду от датчика наклоны от любого колебания на взятие предмета и подъем. После команды датчика перемещения – манипулятор опустит объект. Это может понадобится, например, слесарю-сборщику, которому необходимо поднять тяжелый объект в вверх, проверить. Затем он может датчику поблизости дать команду, и объек5т опустят на землю.
Почему же это возможно в нашем случае только теоретически? Это связано с тем, что все действия робота-манипулятора «завязаны» на смартхабе. И все двигатели и датчики присоединяются исключительно к нему. Но у конструктора Lego WeDo 2.0 на смартхабе есть только два выхода для подключения, и так сложилось, что один из них будет постоянно занят двигателем, чтобы робот-манипулятор мог приходить в движение.
Экономическая оценка изделия
| № | Наименование | Стоимость | Количество, шт. | |
| 1. | Набор конструктора Lego WeDo 2.0 | 6252 руб. | 1 | |
| 2. | Программа Lego WeDo 2.0 | 0 руб. о коп. | 1 | |
| 3. | Электроэнергия на подзарядку | 1 руб. в неделю | 0.6 кВт/ч | |
| Итого | 6253 руб. |
| ||
Учитывая тот факт, что я очень сильно увлекаюсь Lego и программированием, то родители мне приобрели набор конструктора Lego WeDo 2.0. Лицензионная программа идет вместе с набором бесплатно. В наборе есть электронные средства, и некоторые из них требуют подзарядки. Родителя помогли мне рассчитать приме6рную стоимость затраченной электроэнергии на мой конструктор. За неделю это тратит примерно 1 рубль из семейного бюджета, и я с уверенностью могу сказать, что это примерно 4 рубля в месяц (или 48 рублей в год).
Мне все же удалось достичь цели проектирования, потому что моя модель манипулятора соответствует моим ожиданиям. Манипулятор выполняет следующие действия: захватывает предмет, осуществляет подъем предмета, опускает предмет и раскрывает захват. Работа манипулятора выполнялась за счет программы, которую мы вместе с руководителем составляли сами, поскольку в программном обеспечении конструктора данная работа практически отсутствовала.
Цель достигнута. Гипотеза моя подтвердилась, можно сделать робота самостоятельно. Результатом моей работы является изготовленная модель манипулятора. Сама работа меня очень заинтересовала, с трудом мог оторваться от процесса. Было не просто, а порой сложно, но и очень увлекательно.
Изделие изготовлено собственными силами. Все технологические операции доступны. Модель получилась лёгкая и практичная.
Полученная модель будет являться хорошим наглядным пособием для уроков технологии, окружающего мира, внеурочных занятиях не только во 2 классе, но и в более старших классах при изучении механизмов и электротехнических устройств в технологических системах. (Приложение 10)
На этом мое погружение в робототехнику и программирование не завершилось. Я однозначно продолжу обучаться в данных направлениях, буду практиковаться, создавать новые проекты. Я уверен, что в будущем у меня получится создать свое уникальное творение, которое принесет много пользы нашему миру.
Список литературы
http://intalent.pro/article/osnovy-robototehniki.html
http://roboting.ru/1240-manipulyator-na-invalidnoj-kolyaske.html
https://megaobzor.com/fizicheskie-osnovy-robototehniki.html
https://ru.wikipedia.org/wiki/%D0%A0%D0%BE%D0%B1%D0%BE%D1%82
Встовский Н. Ю. Разработка учебного робота-манипулятора, аппаратная часть [Электронный ресурс] — Режим доступа: http://pnu.edu.ru
Гололобов Н. В.О проекте Arduino для школьников. Москва, 2011.
Зенкевич С. Л. Основы управления манипуляционными роботами. Москва, 2004.


Приложение 1
Изготовление клешни робота-манипулятора
Добавление электронных компонентов
Приложение 3
Завершение работы и готовое изделие
Приложение 4
Базовая программа действия
Приложение 5


Добавление датчика наклона
 Приложение 6
Приложение 6
Программа действия при наличии датчика наклона
Приложение 7


Установление датчика перемещения
Приложение 8
Программа действия при наличии датчика перемещения
Приложение 9
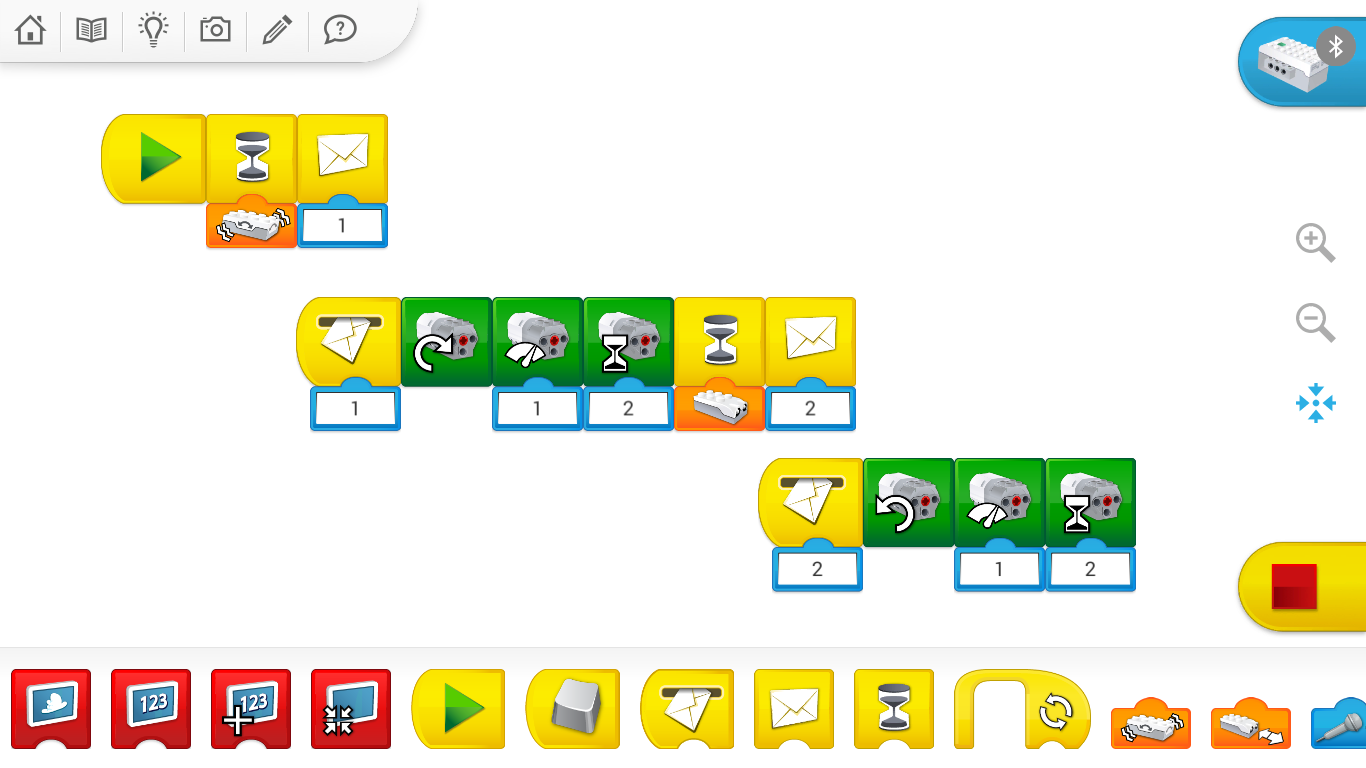
Программа действия при наличии датчика наклона и датчика перемещения
Приложение 10

Выступление перед классом








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

