
Россия, Каменск-Шахтинский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 17.04.2026 10:21

Барышев Евгений Валентинович
педагог дополнительного образования
61 год
Местоположение
Специализация
«Простые механизмы в конструировании»
Категория:
Прочее
16.01.2023 10:44

Просмотр содержимого документа
««Простые механизмы в конструировании»»
Муниципальное бюджетное учреждение
дополнительного образования «Станция юных техников»
города Каменск-Шахтинский
Принята на методическом совете
Протокол №______ от «___» _________ 20___г
(Для учащихся 1 года обучения робототехнических объединений учреждений дополнительного образования)
Автор: Барышев Е. В.
педагог дополнительного образования.
2023
Пояснительная записка.
Данная методическая разработка предназначена для ознакомления учащихся 1 года обучения с простыми механизмами при конструировании в робототехнике. В качестве примера рассмотрен редуктор для движения робота.
Методическая разработка является приложением к образовательной программе «Робототехника» по теме «Расчет и выбор типа привода» и направлена на достижение следующих целей и задач:
Образовательные:
ознакомить учащихся с простыми механизмами в робототехнике;
ознакомить учащихся с видами редукторов;
оказать помощь в реализации различных моделей поведения и применения механизмов в робототехнике.
Развивающие:
развитие интереса и склонностей в области робототехнике;
развитие конструкторского и изобретательского мышления.
Воспитывающие:
воспитание всестороннего интереса к технике, творческого отношения к труду;
воспитание чувства взаимоуважения между кружковцами.
Работа рассчитана на учащихся объединения «Робототехника» в возрасте 12 – 14 лет. На изучение простых механизмов в конструировании роботов отведено 4 занятий по 2 часа.
Сохраняя общую направленность материала, определяемую предлагаемой методической разработкой, преподаватель, должен иметь свой авторский демонстрационный материал, наглядное пособие, фото и видео материал.
Что такое механизм движения?
Простейшие механизмы были описаны Героном Александрийским в его трактате «Механика».
Он описал пять типов простейших машин:
Рычаг (рис. 1) - простейший механизм, представляющий собой балку, вращающуюся вокруг точки опоры [1].

Рис. 1. Использование рычага для получения большего усилия на коротком плече, за счет приложения меньшей силы на длинном.
Ворот (рис. 2) — простейший механизм, предназначенный для создания тягового усилия на канате (тросе, веревке). Синоним простейшей лебедки [1].

Рис. 2. Применение ворота в колодце
Клин (рис. 3) — простой механизм в виде призмы, рабочие поверхности которого сходятся под острым углом. используется для раздвижения, разделения на части обрабатываемого предмета [1]. Клин — одна из разновидностей механизма под названием «наклонная плоскость».
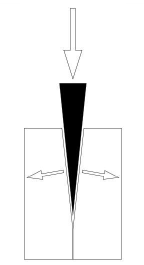
Рис. 3. Принцип действия клина
Винт (шнек) - простейший механизм (рис. 4). Резьба винта, в сущности, представляет собой другой простейший механизм - наклонную плоскость, многократно обернутую вокруг цилиндра [1].
Примеры простых устройств с винтовой резьбой — домкрат, болт с гайкой, тиски.
деальный выигрыш в силе равен отношению расстояния, проходимого точкой
приложения усилия за один оборот винта (длины окружности), к расстоянию между двумя
соседними витками резьбы (шаг резьбы).
Первый винт был запатентован в 1784 году, через 1700 лет после Герона.

Рис. 4. Винт
Блок (рис. 5) - простое механическое устройство, позволяющее регулировать силу, ось которого закреплена при подъеме грузов, не поднимается и не опускается.
Представляет собой колесо с желобом по окружности, вращающееся вокруг своей оси.
Желоб предназначен для каната, цепи, ремня и т. п. Ось блока помещается в обоймах, прикрепленных на балке или стене, такой блок называется неподвижным (то есть ось блока закреплена); если же к этим обоймам прикрепляется груз, и блок вместе с ними может двигаться, то такой блок называется подвижным [1].

Рис. 5. Система из неподвижного и подвижного блоков
Именно Герон установил «золотое правило механики», согласно которому выигрыш в силе при использовании простых механизмов сопровождается потерей в расстоянии. "Механика" Герона дошла до нас в переводе арабского ученого IX века н.э. Косты аль-Балбаки. До XIX века эта книга нигде не публиковалась. В "Механике" помимо описания простейших механизмов: клина, рычага, ворота, блока, винта, описывается механизм для подъема грузов, называемый барулком (рис. 6).

Рис. 6. Барулк (baroulkos)
Это не что иное, как редуктор, используемый в качестве лебедки. Барулк Герона состоит из нескольких зубчатых колес, приводимых в движение ручной силой, причем Герон принимает отношение диаметра колеса к диаметру оси равным 5:1.
Редуктор (механический) механизм, передающий и преобразующий крутящий момент, с одной или более механическими передачами.
Основные характеристики редуктора:
КПД,
передаточное отношение - это отношение угловой скорости ведущего вала к угловой скорости ведомого вала (рис. 7),
передаваемая мощность,
максимальные угловые скорости валов,
количество ведущих и ведомых валов,
тип и количество передач и ступеней.

Рис. 7. Передаточное отношение редуктора.
Редуктор со ступенчатым изменением передаточного отношения называется коробкой передач (рис. 8), с бесступенчатым - вариатор.


Рис. 8. Устройство цилиндрического редуктора.
Зубчатые передачи имеют еще одно название - шестеренчатые. По взаимному расположению осей ведущего и ведомого валов зубчатые передачи классифицируются следующим образом:
цилиндрические, если оси валов параллельны (рис. 9),
конические, если оси валов перпендикулярны друг другу (рис. 10);
планетарные передачи, у которых оси пересекаются в пространстве (рис. 11).

Рис. 9. Пример цилиндрической передачи.

Рис. 10. Пример конической передачи.

Рис. 11. Пример планетарной передачи.
Кривошипно-шатунный механизм (рис. 12) предназначен для преобразования возвратно-поступательного движения поршня во вращательное движение, и наоборот.
Состоит из следующих деталей:
Кривошип - звено кривошипно-шатунного механизма, совершающее циклическое вращательное движение на полный оборот вокруг неподвижной оси.
Шатун как элемент, необходимый для соединения Ползуна и Кривошипа.
Ползун - звено кривошипно-шатунного механизма, совершающее циклическое возвратно-поступательное движение за один оборот кривошипа.

Рис. 12. Кривошипно-шатунный механизм.
Кулачковый механизм - механизм (рис. 13), образующий высшую кинематическую пару, имеющий подвижное звено, совершающее вращательное движение, - кулак (кулачок), с поверхностью переменной кривизны или имеющей форму эксцентрика, взаимодействующей с другим подвижным звеном - толкателем, если подвижное звено совершает прямолинейное движение, или коромыслом, если подвижное звено совершает качание. Кулак, совершающий прямолинейное движение, называется копиром.
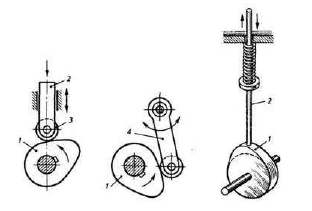
Рис. 13. Кулачковые механизмы различной конструкции: 1 – кулачок; 2 - толкатель; 3 - ролик; 4 - коромысло
Храповой механизм (храповик) - зубчатый механизм прерывистого движения, предназначенный для преобразования возвратно-вращательного движения в прерывистое вращательное движение в одном направлении (рис. 14). Проще говоря, храповик позволяет оси вращаться в одном направлении и не позволяет вращаться в другом.

Рис. 14. Конструкция храпового механизма
В этом разделе коротко познакомились с некоторыми механизмами, которые можно применить для конструирования роботов.
Редуктор движения для робота.
Назначение редуктора - понижение угловой скорости и соответственно повышение вращающего момента ведомого вала по сравнению с ведущим. Редуктор состоит из корпуса (литого чугунного или сварного стального), в котором помещают элементы передачи - зубчатые колеса, валы, подшипники и т. д.
Как известно, современные электродвигатели выдают частоту ведущего вала примерно в районе полутора тысячи (1500) оборотов в минуту. А конечным потребителям в цепочке передачи движения обычно требуется, куда меньшая частота вращения вала.
Здесь на помощь как раз и придут многоступенчатые редукторы. Наличие нескольких ступеней позволяет сделать компактное устройство, значительно снижающее частоту вращения вала.
На рисунке 15 показан технический рисунок редуктора с одним двигателем на два колеса. На рисунке 16 показана 3D модель редуктора. На рисунке 17 детали редуктора.

Рис. 15. Технический рисунок редуктора.

Рис. 16. 3D модель редуктора.


Рис. 17. 3D детали редуктора.
На рисунке 18 показаны детали для сборки редуктора с передаточным отношением 41,61 на одно колесо. Шестеренка на двигателе имеет 10 зубьев, двойные шестеренки – 10х34 зубьев, одинарные шестеренки имею 36 зубьев. Редуктор имеет соотношение оборотов двигателя и колеса равное 1:113.

Рис.18. Детали для сборки редуктора.
В общем случае общее передаточное отношение редуктора равно отношению частоты вращения входного (ведущего) вала и частоты вращения ведомого (выходного) вала. Отсюда следует, что если выходной вал вращается медленнее входного, то передаточное отношение будет больше единицы. Такие передачи называют понижающими.
Если же скорость выходного вала будет выше скорости входного вала, то передаточное число будет меньше единицы. В этом случае говорят о повышающей передаче.
Если в передаче участвует так называемая «паразитка», то она в расчете передаточного отношения не участвует, так как ее задача лишь менять направление движения.
Заключение.
Данная методическая разработка была апробирована в робототехническом объединении учащимися 1 года обучения в течение 2 лет.
Реализация методической разработки позволила заинтересовать учеников к робототехнике и узнать больше информации о новых направлениях в механике и робототехнике. Учитель из носителя готовых знаний превращается в организатора познавательной, исследовательской деятельности своих учеников.
Простота в сборке редуктора, в сочетании с моделью робота, позволило учащимся в конце урока увидеть собранный своими руками редуктор. Установить на модель робота, испытать модель, которая после отладки выполняла поставленную ими же самими задачу.
Источники информации.
Марш П., Барнетт П., Дулинг Д., Гилл К., Мэтьюз П., Моравек Г. Не счесть у робота профессий \\Перевод с англ. Кузьмина Ю.А. Под редакцией проф. Гурфинкеля В.С. - Москва: Мир, 1987 - 182 с.
Некоторые разновидности роботов [Электронный ресурс]: http://helpiks.org/934656.html.
ГОСТ 30097-93. Роботы промышленные. Системы координат и направления движений.
Передаточное число редуктора [Электронный ресурс]: https://www.ttaars.ru/about/stati/peredatochnoe-chislo-reduktora.
Страковский Д. А., Симаков Е. Е. Создание робота-гонщика на платформе Arduino // Юный ученый. — 2016. — №3. — С. 120-124.
14
Комплекты видеоуроков для учителей








Скачать
© 2023, Барышев Евгений Валентинович 1311 15
Похожие файлы
Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

