
Россия, город Железногорск Курской области


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 10.04.2024 20:49

Агашкова Надежда Анатольевна
Учитель матемаики
52 года
Местоположение
Специализация
Расстояние от точки до плоскости. Метод координат.
Категория:
Математика
21.04.2017 22:19

Просмотр содержимого документа
«Расстояние от точки до плоскости. Метод координат.»
Расстояние от точки до плоскости
Задачи на нахождение расстояния от точки до плоскости ( типовые задачи С2)
Подготовила:
учитель математики
МОУ «Гимназия №1»
г. Железногорска Курской области
Агашкова Н.А.
План проведения занятий.
- Нахождение расстояния от точки до плоскости по определению. Построение перпендикуляра к плоскости на основании признака перпендикулярности прямой и плоскости.
- Нахождение расстояния от точки до плоскости по определению. Построение перпендикуляра к плоскости на основании признака перпендикулярности прямой и плоскости.
- Нахождение расстояния от точки до плоскости. Построение перпендикуляра к плоскости на основании свойства перпендикулярных плоскостей.
- Нахождение расстояния от точки до плоскости. Построение перпендикуляра к плоскости на основании свойства параллельности прямой и плоскости.
- Нахождение расстояния от точки до плоскости методом объемов.
- Нахождение расстояния от точки до плоскости методом координат.
Метод координат – это один из самых универсальных методов геометрии. В принципе почти любую геометрическую задачу можно решить методом координат. Однако, попытки решать каждую задачу только координатным методом (имеются в виду, конечно, те задачи, в условии которых не говорится о координатах) часто приводят к тому, что даже простая геометрическая задача становится очень сложной алгебраической.
Главное при решении геометрических задач координатным методом – удачный выбор системы координат, т.е. выбор начала координат и направления осей. Обычно в качестве осей координат выбирают прямые, фигурирующие в условии задачи, или оси симметрии (если они есть) фигур, рассматриваемых в задаче. Желательно, чтобы выбранная система координат естественным образом определялась условием задачи.
Следует отметить, что при решении задачи координатным методом выпускник должен получить правильный ответ, и только тогда его решение будет оценено в 2 балла. В противном случае его решение не соответствует приведенным критериям и будет оценено в 0 баллов.
Метод координат
Метод координат можно использовать, вычисляя:
- расстояние между двумя точками;
- расстояние от точки до прямой;
- расстояние от точки до плоскости;
- угол между прямой и плоскостью;
- угол между плоскостями;
- расстояние между скрещивающимися прямыми.
Расположение относительно прямоугольной системы координат некоторых видов многогранников, наиболее часто используемых в задачах.
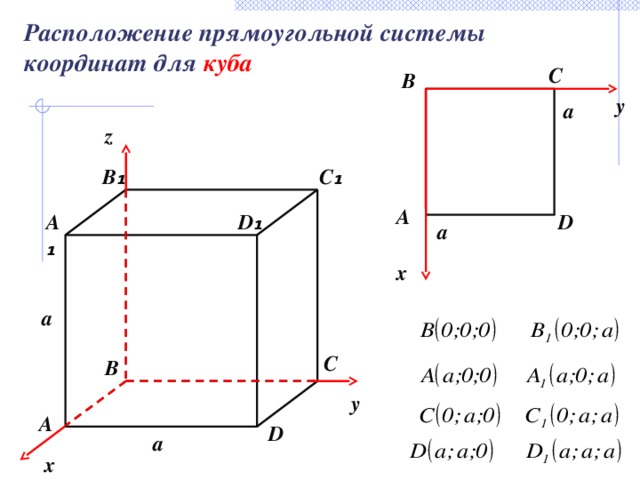
Расположение прямоугольной системы координат для куба
C
B
y
a
z
C ₁
B ₁
А
D
А ₁
D ₁
a
x
a
C
B
y
А
D
a
x
6
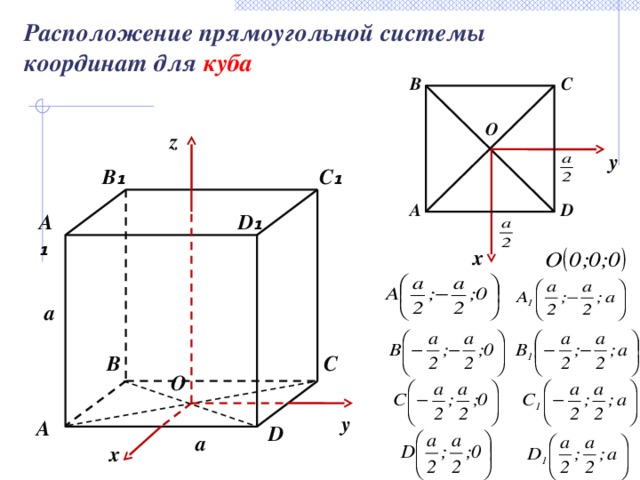
Расположение прямоугольной системы координат для куба
B
C
O
z
y
C ₁
B ₁
D
A
D ₁
А ₁
x
a
B
C
O
y
А
D
a
x
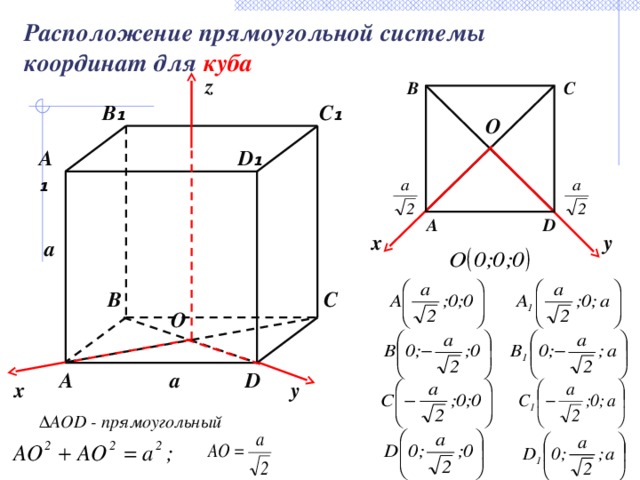
Расположение прямоугольной системы координат для куба
z
C
B
B ₁
C ₁
O
А ₁
D ₁
D
A
x
y
a
B
C
O
a
D
А
x
y
∆ AOD - прямоугольный
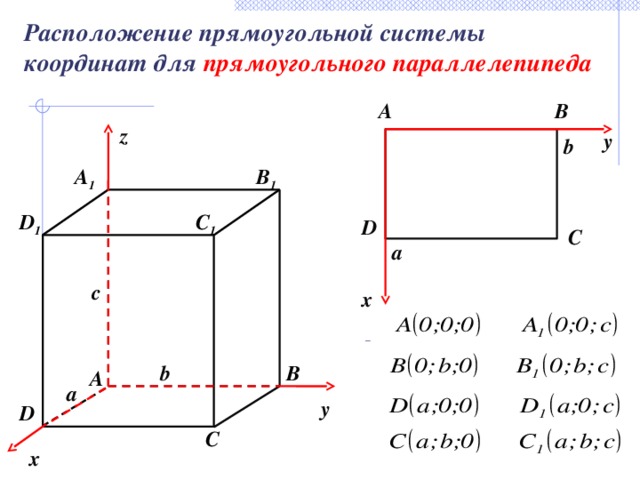
Расположение прямоугольной системы координат для прямоугольного параллелепипеда
A
B
z
y
b
A 1
B 1
C 1
D 1
D
C
a
c
x
b
B
A
a
y
D
C
x
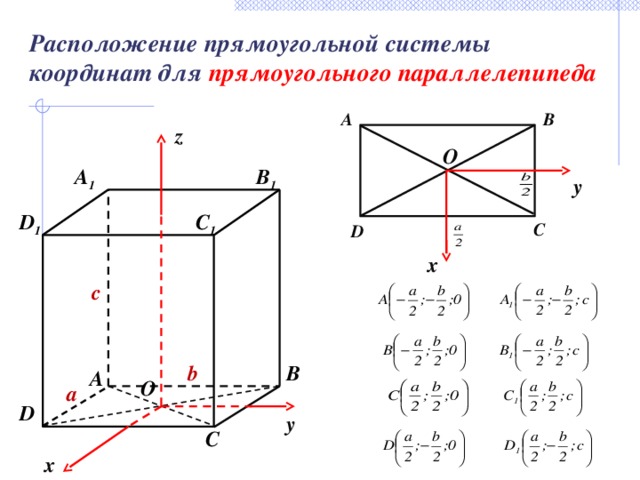
Расположение прямоугольной системы координат для прямоугольного параллелепипеда
A
B
z
O
B 1
A 1
y
D 1
C 1
C
D
x
c
b
B
A
O
a
D
y
C
x
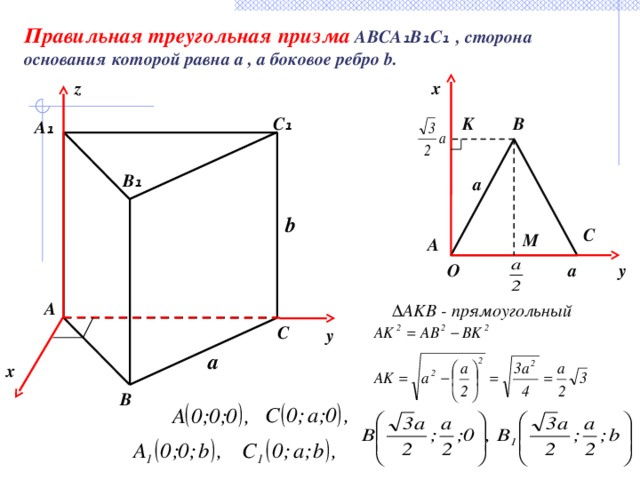
Правильная треугольная призма ABCA ₁ B ₁ C ₁ , сторона основания которой равна a , а боковое ребро b.
x
z
B
C ₁
K
A ₁
B ₁
a
b
C
M
A
O
y
a
A
∆ AKB - прямоугольный
C
y
a
x
B
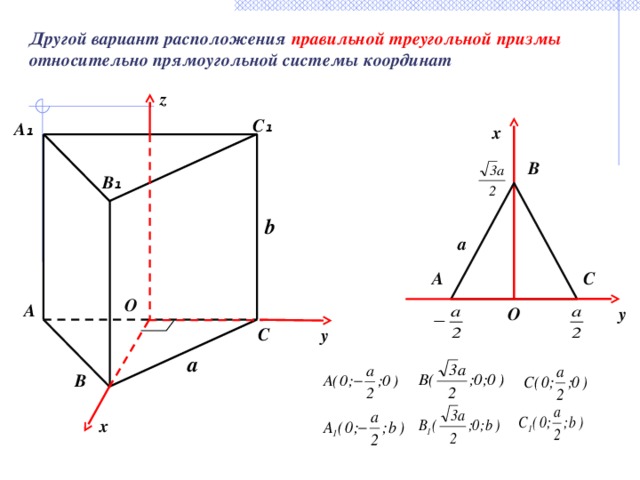
Другой вариант расположения правильной треугольной призмы относительно прямоугольной системы координат
z
C ₁
A ₁
x
B
B ₁
b
a
C
A
O
A
O
y
C
y
a
B
x
12
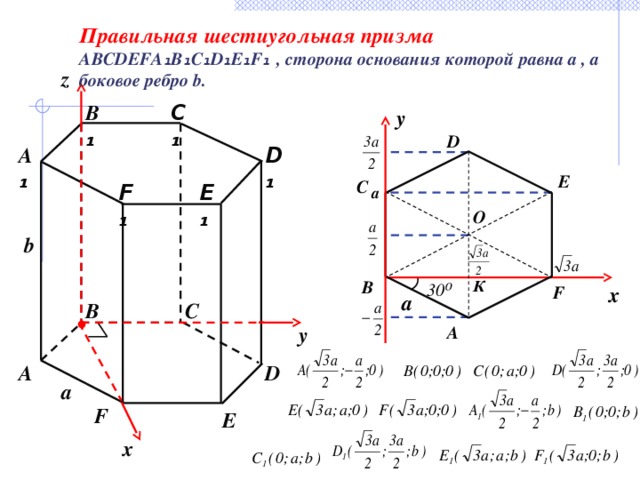
Правильная шестиугольная призма ABCDEFA ₁ B ₁ C ₁ D ₁ E ₁ F ₁ , сторона основания которой равна a , а боковое ребро b.
z
B ₁
C₁
y
D
D₁
А ₁
E
C
F₁
E₁
а
O
b
К
B
30⁰
F
x
а
C
B
y
A
А
D
a
F
E
x
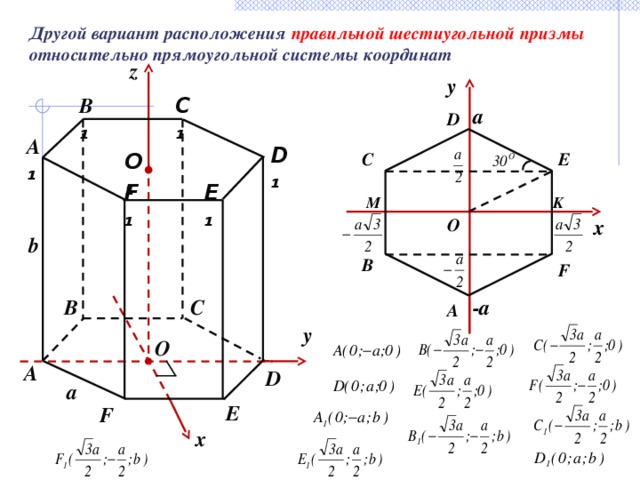
Другой вариант расположения правильной шестиугольной призмы относительно прямоугольной системы координат
z
у
B ₁
C₁
a
D
А ₁
D₁
О₁
C
E
E₁
F₁
M
K
х
O
b
B
F
B
C
-a
A
y
О
А
D
a
E
F
x
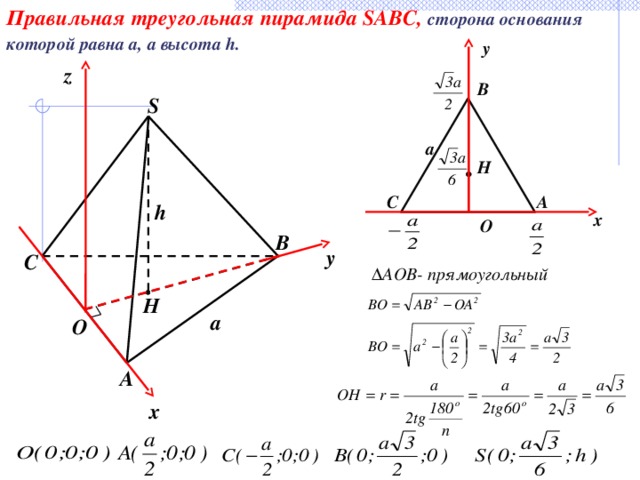
Правильная треугольная пирамида SABC, сторона основания которой равна а, а высота h.
y
z
B
S
a
Н
C
A
h
x
O
B
y
C
∆ АОВ- прямоугольный
H
a
O
A
x
15
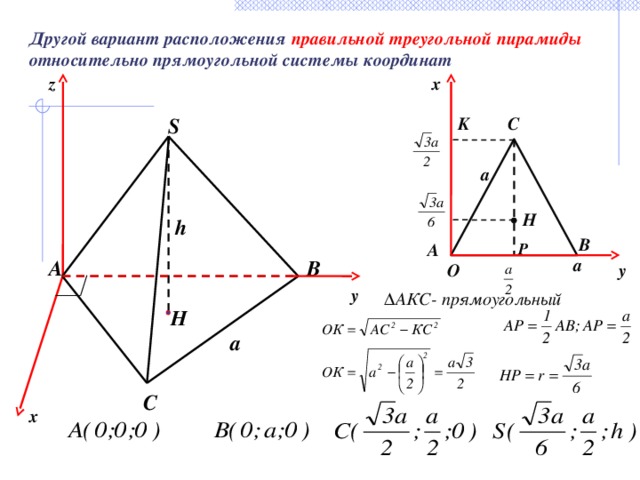
Другой вариант расположения правильной треугольной пирамиды относительно прямоугольной системы координат
x
z
K
S
C
a
H
h
B
P
A
a
A
B
y
O
y
∆ АКС- прямоугольный
H
a
C
x
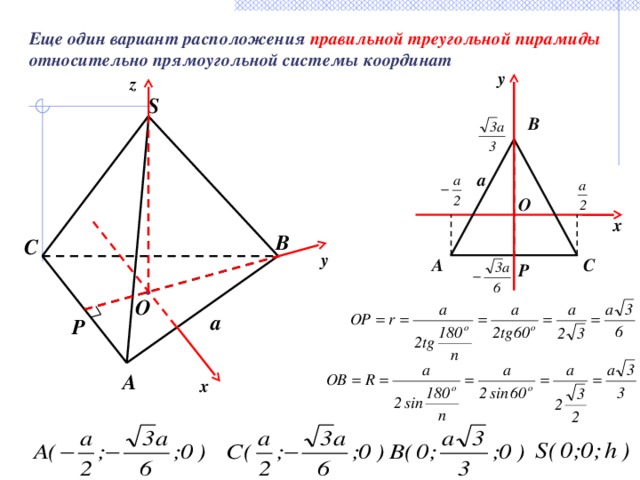
Еще один вариант расположения правильной треугольной пирамиды относительно прямоугольной системы координат
y
z
S
B
a
O
x
B
C
y
A
C
Р
O
a
P
A
x
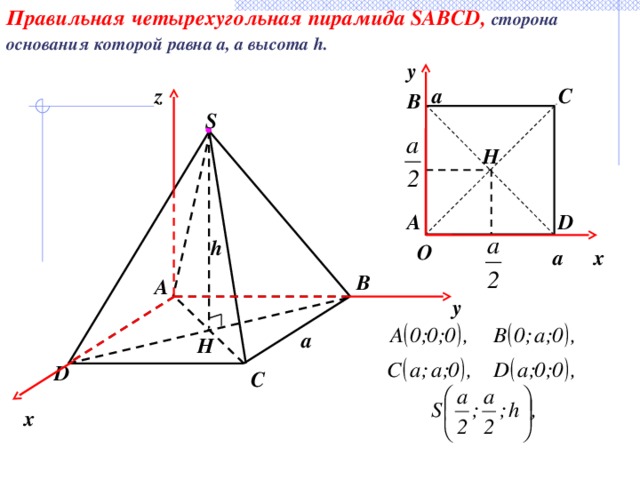
Правильная четырехугольная пирамида SABCD, сторона основания которой равна а, а высота h.
y
z
a
C
B
S
H
D
A
h
O
x
a
B
A
y
a
Н
D
C
x
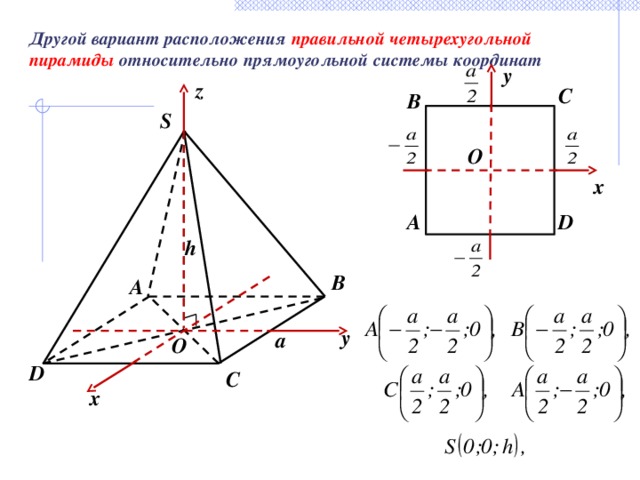
Другой вариант расположения правильной четырехугольной пирамиды относительно прямоугольной системы координат
y
z
C
B
S
O
x
D
A
h
B
A
y
a
O
D
C
x
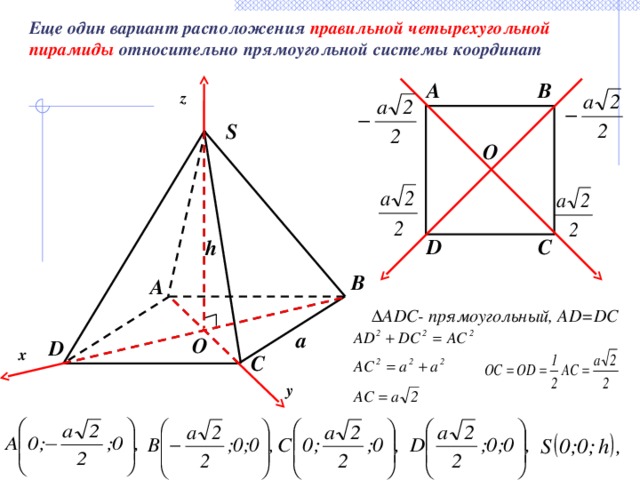
Еще один вариант расположения правильной четырехугольной пирамиды относительно прямоугольной системы координат
A
B
z
S
O
D
C
h
B
A
∆ ADC- прямоугольный, AD=DC
a
O
D
x
C
y
20
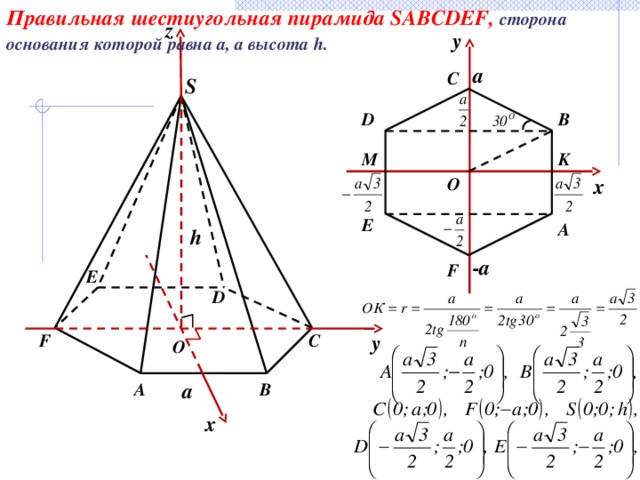
Правильная шестиугольная пирамида SABCDEF, сторона основания которой равна а, а высота h.
z
у
a
C
S
B
D
K
M
х
O
E
A
h
-a
F
E
D
C
F
у
O
a
B
A
х
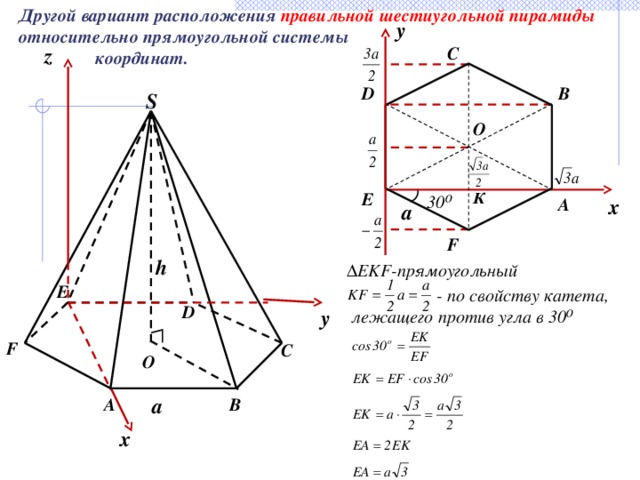
Другой вариант расположения правильной шестиугольной пирамиды относительно прямоугольной системы
координат.
y
C
z
B
D
S
O
К
E
30⁰
x
A
а
F
h
∆ EKF-прямоугольный
E
- по свойству катета, лежащего против угла в 30⁰
D
y
F
C
O
a
B
A
x
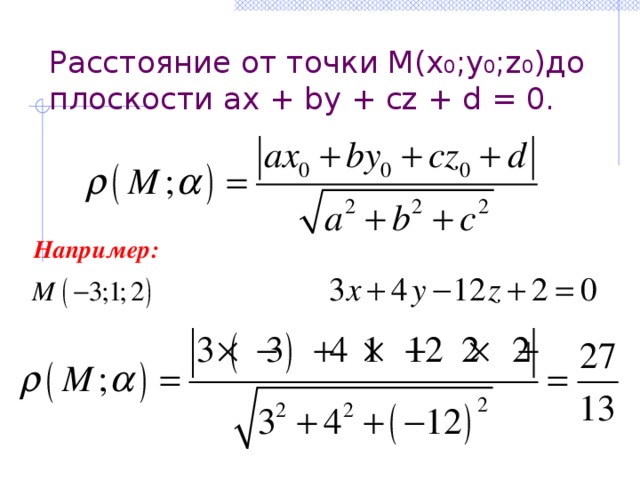
Расстояние от точки М(x 0 ;y 0 ;z 0 )до плоскости ax + by + cz + d = 0.
Например:
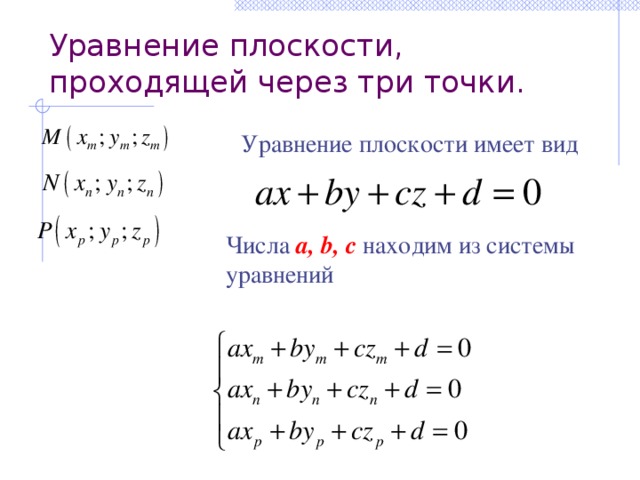
Уравнение плоскости, проходящей через три точки.
Уравнение плоскости имеет вид
Числа a, b, c находим из системы уравнений
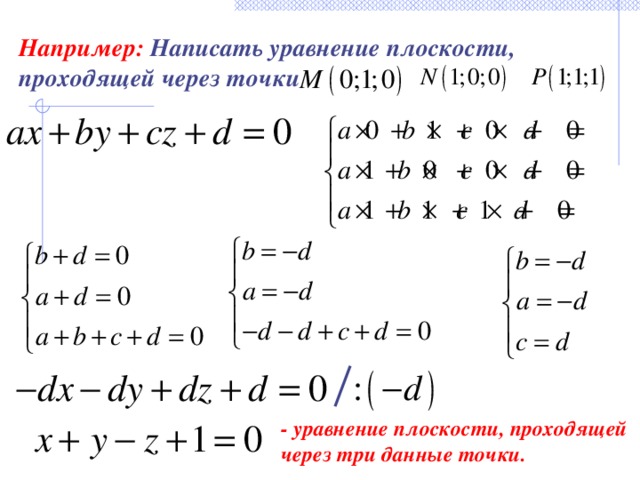
Например: Написать уравнение плоскости, проходящей через точки
- уравнение плоскости, проходящей через три данные точки.
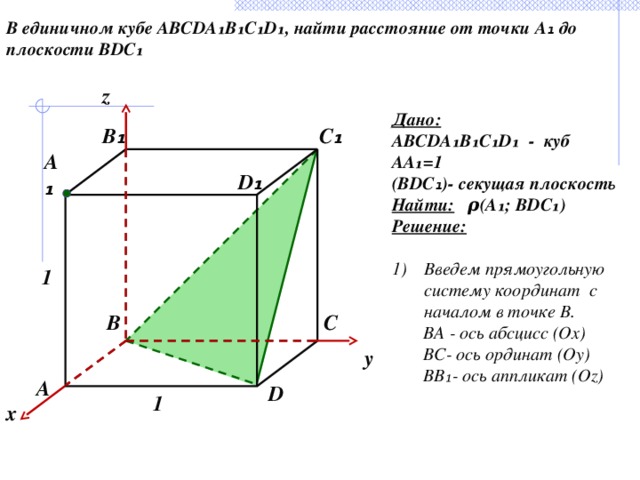
В единичном кубе ABCDA₁B₁C₁D₁, найти расстояние от точки А ₁ до плоскости BDC₁
z
Дано:
ABCDA₁B₁C₁D₁ - куб
АА₁=1
(BDC ₁ )- секущая плоскость
Найти: ρ (А₁; BDC₁)
Решение:
- Введем прямоугольную систему координат с началом в точке В.
BA - ось абсцисс (Ox)
ВС- ось ординат (Oy)
ВВ₁- ось аппликат (Oz)
B ₁
C ₁
А ₁
D ₁
1
C
B
y
А
D
1
x
26
z
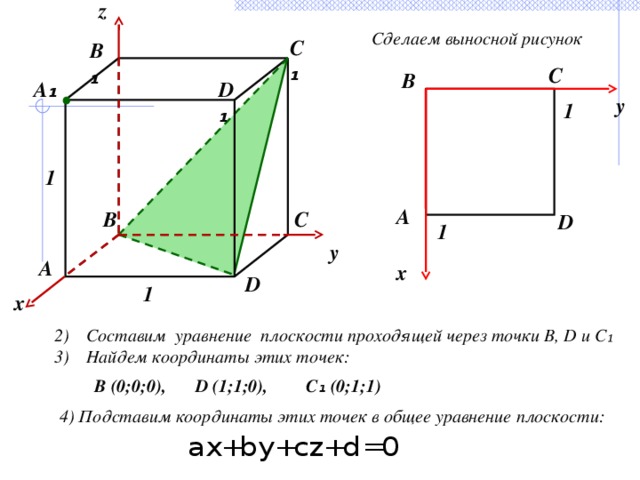
Сделаем выносной рисунок
C ₁
B ₁
C
B
D ₁
А ₁
y
1
1
А
B
C
D
1
y
А
x
D
1
x
- Составим уравнение плоскости проходящей через точки В, D и С₁
- Найдем координаты этих точек:
В (0;0;0),
D (1;1;0),
С ₁ (0;1;1)
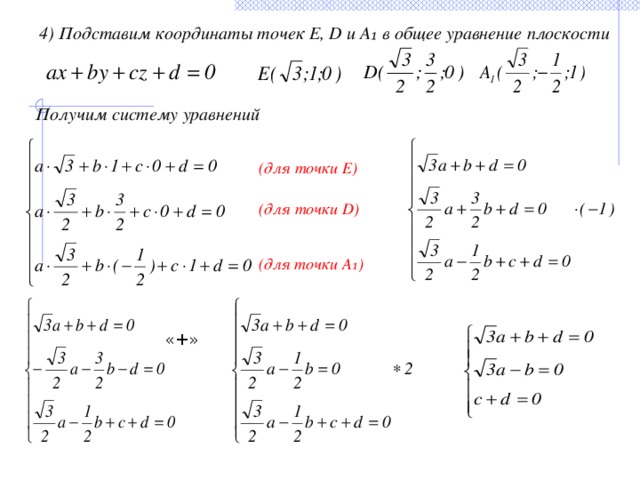
4) Подставим координаты этих точек в общее уравнение плоскости:
z
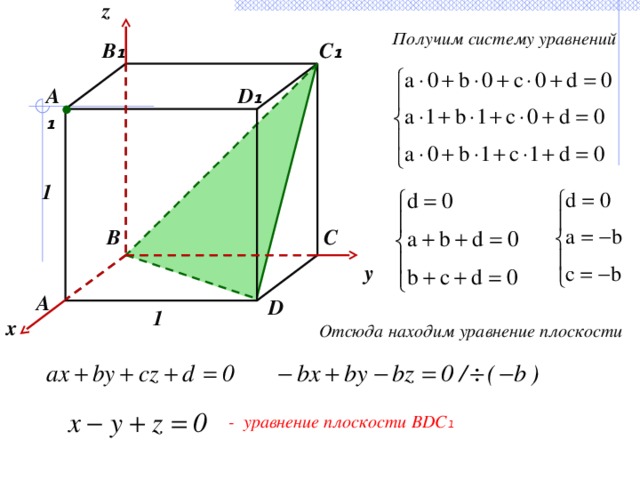
Получим систему уравнений
C ₁
B ₁
А ₁
D ₁
1
B
C
y
А
D
1
x
Отсюда находим уравнение плоскости
- уравнение плоскости BDC ₁
z
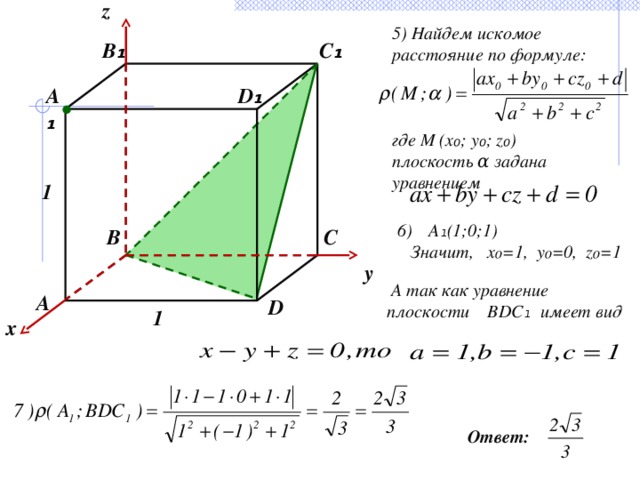
5) Найдем искомое расстояние по формуле:
где М (х ₀ ; у ₀ ; z ₀ )
плоскость α задана уравнением
C ₁
B ₁
D ₁
А ₁
1
- А ₁ (1;0;1)
Значит, x₀=1, y₀=0, z₀=1
B
C
y
А так как уравнение плоскости BDC ₁ имеет вид
А
D
1
x
Ответ:
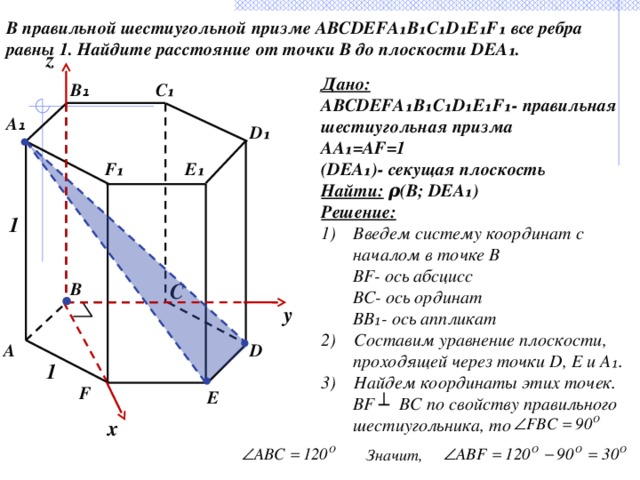
В правильной шестиугольной призме ABCDEFA₁B₁C₁D₁E₁F₁ все ребра
равны 1. Найдите расстояние от точки B до плоскости DEA₁.
z
Дано:
ABCDEFA₁B₁C₁D₁E₁F₁- правильная шестиугольная призма
AA₁=AF=1
(DEA₁)- секущая плоскость
Найти: ρ(B; DEA₁)
Решение:
- Введем систему координат с началом в точке В
BF- ось абсцисс
BC- ось ординат
BB₁- ось аппликат
2) Составим уравнение плоскости, проходящей через точки D, E и A₁.
3) Найдем координаты этих точек.
BF ┴ BC по свойству правильного шестиугольника, то
C₁
B ₁
А ₁
D₁
F₁
E₁
1
C
B
y
D
А
1
F
E
x
Значит,
z
В
C₁
B ₁
y
С
D₁
А ₁
1
30 ⁰
О
E₁
F₁
К
А
D
1
Е
F
B
C
y
x
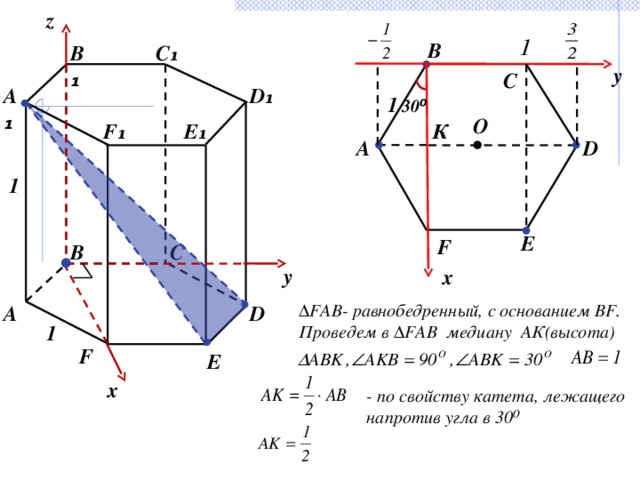
∆ FAB- равнобедренный, с основанием BF.
Проведем в ∆FAB медиану АК(высота)
А
D
1
F
E
x
- по свойству катета, лежащего напротив угла в 30⁰
z
В
B ₁
C₁
y
С
А ₁
D₁
1
30 ⁰
О
E₁
К
F₁
А
D
1
Е
F
C
B
y
x
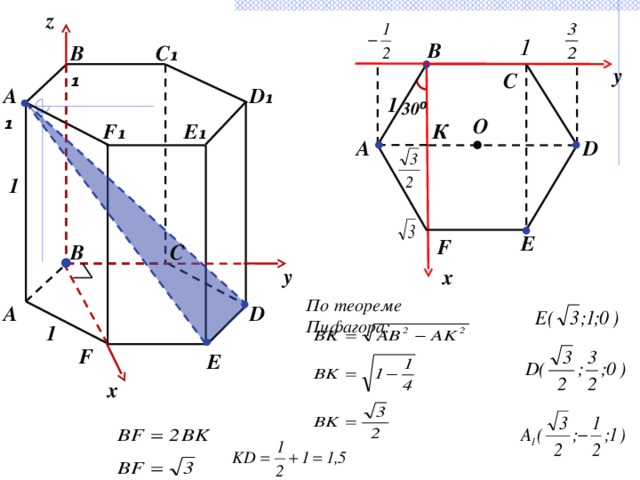
По теореме Пифагора:
D
А
1
F
E
x
4) Подставим координаты точек E, D и А₁ в общее уравнение плоскости
Получим систему уравнений
(для точки Е)
(для точки D)
(для точки A₁)
«+»
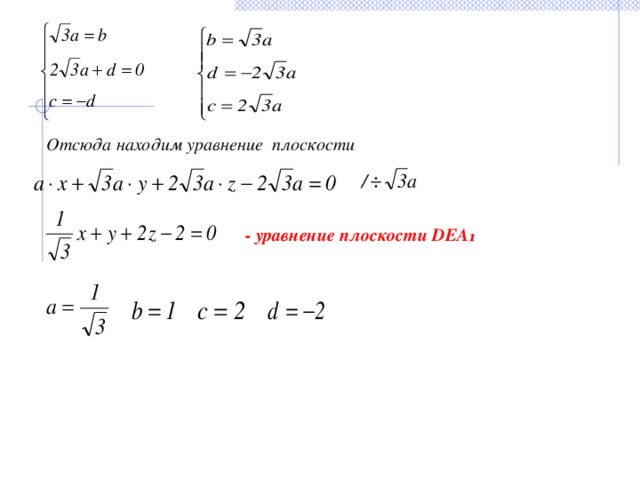
Отсюда находим уравнение плоскости
- уравнение плоскости DEA₁
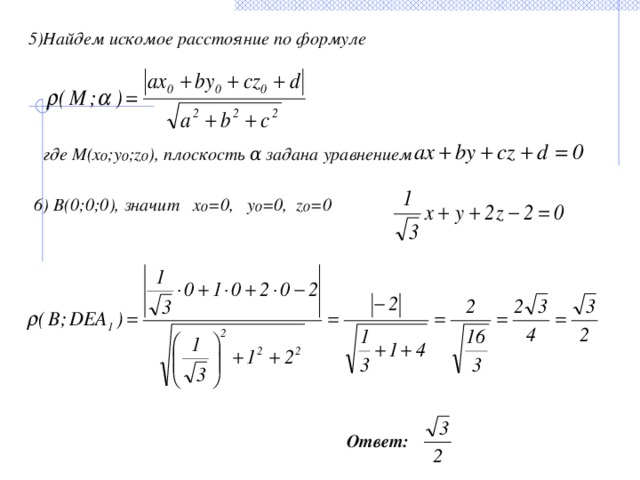
5)Найдем искомое расстояние по формуле
где М(x₀;y₀;z₀), плоскость α задана уравнением
6) B(0;0;0), значит х₀=0, y₀=0, z₀=0
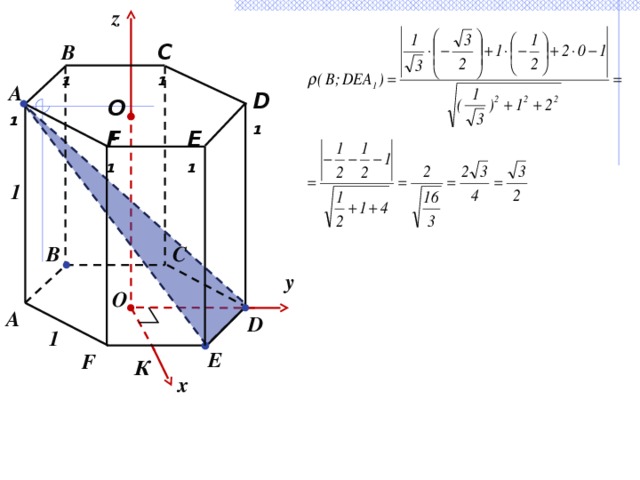
Ответ:
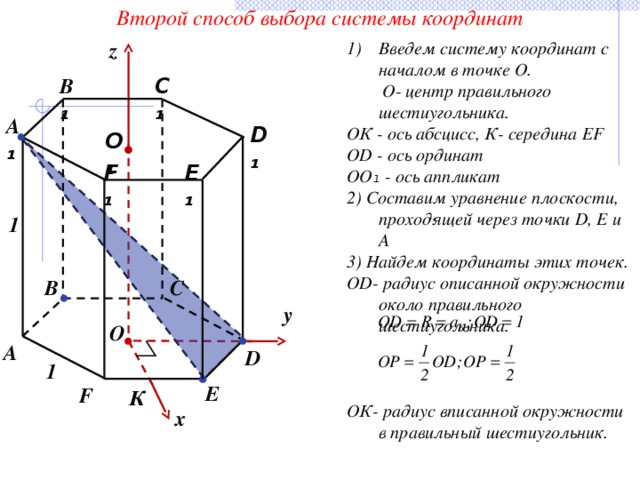
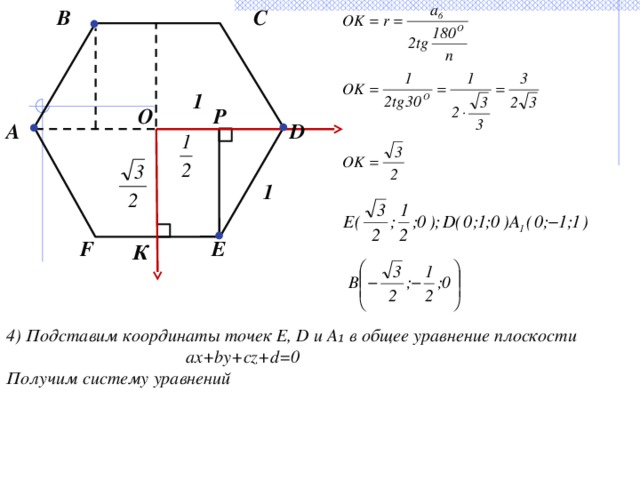
Второй способ выбора системы координат
z
- Введем систему координат с началом в точке О.
О- центр правильного шестиугольника.
ОК - ось абсцисс, К- середина ЕF
OD - ось ординат
OO ₁ - ось аппликат
2) Составим уравнение плоскости, проходящей через точки D, E и A
3) Найдем координаты этих точек.
ОD- радиус описанной окружности около правильного шестиугольника.
ОК- радиус вписанной окружности в правильный шестиугольник.
B ₁
C₁
А ₁
D₁
О₁
E₁
F₁
1
B
C
y
О
А
D
1
E
F
К
x
С
В
1
Р
О
А
D
1
Е
F
К
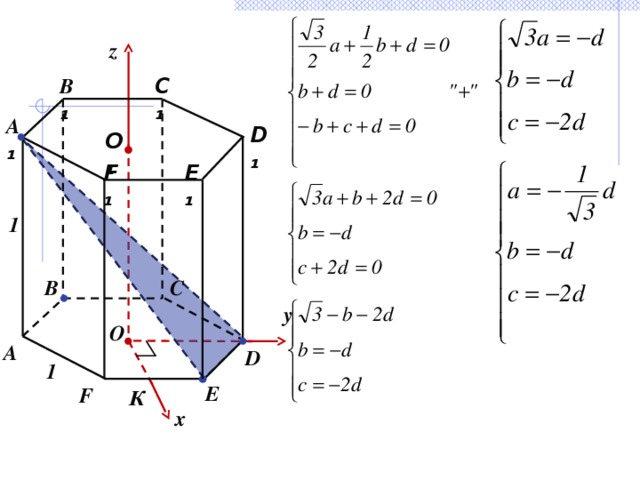
4) Подставим координаты точек Е, D и А₁ в общее уравнение плоскости
ax+by+cz+d=0
Получим систему уравнений
z
B ₁
C₁
А ₁
D₁
О₁
E₁
F₁
1
B
C
y
О
А
D
1
E
F
К
x
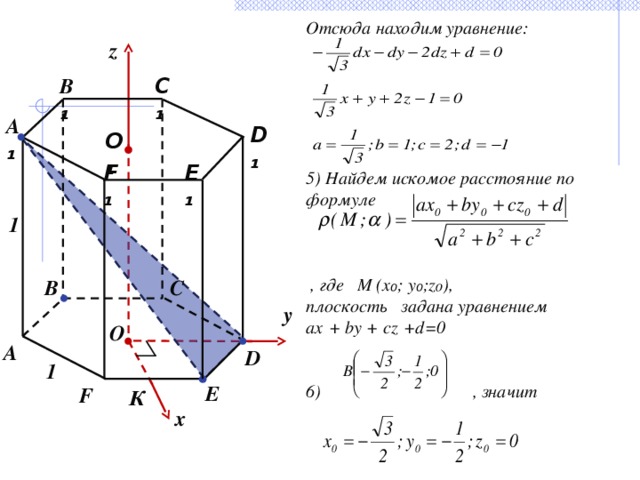
Отсюда находим уравнение:
5) Найдем искомое расстояние по формуле
, где М (х ₀ ; у ₀ ;z₀),
плоскость задана уравнением
ах + by + cz +d=0
- , значит
z
B ₁
C₁
А ₁
D₁
О₁
F₁
E₁
1
C
B
y
О
А
D
1
E
F
К
x
z
C₁
B ₁
А ₁
D₁
О₁
E₁
F₁
1
B
C
y
О
А
D
1
E
F
К
x








© 2017, Агашкова Надежда Анатольевна 7552 184
Рекомендуем курсы ПК и ППК для учителей




Похожие файлы
Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ

