
Россия, Каменск-Шахтинский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 17.05.2026 19:51

Барышев Евгений Валентинович
педагог дополнительного образования
61 год
Местоположение
Специализация
Робот погрузчик для складских помещений
Категория:
Прочее
20.07.2018 21:34

Просмотр содержимого документа
«Робот погрузчик для складских помещений»
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«РОСТОВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
КОНКУРС НАУЧНО-ТЕХНИЧЕСКОГО ТВОРЧЕСТВА
«ДОРОГА В БУДУЩЕЕ»
НОМИНАЦИЯ
«Действующая модель»
НАЗВАНИЕ РАБОТЫ
«РОБОТ ПОГРУЗЧИК ДЛЯ СКЛАДСКИХ ПОМЕЩЕНИЙ»
Выполнила: Анопка Виолетта Евгеньевна,
студентка 4 курса ГБПОУ РО КХМТ.
Муниципальное бюджетное учреждение
дополнительного образования
«Станция юных техников»
город Каменск-Шахтинский
Ростов-на-Дону, 2018
Содержание
| 1. | Введение | 3 |
| 2. | Основная часть | 3 |
| 2.1. | Исследование и анализ складских погрузчиков | 3 |
| 2.2. | Принцип работы модели робота погрузчика | 7 |
| 3. | Этапы изготовления модели робота погрузчика | 8 |
| 3.1. | Материал и инструмент | 8 |
| 3.2. | Механическая начинка модели робота погрузчика | 10 |
| 3.3. | Электронная начинка модели робота погрузчика | 11 |
| 4 | Испытания модели робота погрузчика | 15 |
| 5. | Заключение | 15 |
| 6. | Источники информации | 17 |
| 7. | Приложения | 18 |
Введение
Робот погрузчик предназначен для проведения погрузочно-разгрузочных операций на складских комплексах, в промышленных и торговых организациях, как в закрытых помещениях, так и для работы на открытом воздухе.
Эффективность функционирования промышленного предприятия зависит не только непосредственно от качества самого промышленного производства, но и от организации складского хозяйства и транспорта. Склады промышленных предприятий – неотъемлемая часть общего технологического процесса производства. На складе кроме операций складирования грузов выполняются еще и внутрискладские транспортные, погрузочно-разгрузочные, сортировочные, поэтому склады следует рассматривать не просто как помещения или устройства для хранения грузов, а как транспортно-складские комплексы, в которых важную роль играют процессы своевременного перемещения грузов [8, 16].
Цель проекта – создание модели робота погрузчика для облегчения выполнения трудоемкой и монотонной работы по разгрузке и сортировке различных грузов на складах.
Задачи проекта:
– разработать чертежи механизмов, схемы электроники для модели робота погрузчика;
- разработать программу в среде программирования Arduino для управления модели робота погрузчика;
- определить способ передвижения, учитывая безопасность робота для человека.
Для выполнения поставленной цели и задач проекта, необходимо собрать информацию о складской погрузочной технике, технические характеристики, алгоритмы работы погрузчиков управляемые человеком.
Основная часть
Исследование и анализ складских погрузчиков
Современный крупный склад представляет собой сложное техническое сооружение, которое состоит из множества различных подсистем (комплекса зданий, совокупности перерабатываемых грузов, системы информационного обеспечения и т.д.) и элементов определенной структуры, объединенных для выполнения конкретных функций преобразования материальных потоков [19].
Складские вилочные погрузчики делятся на электропогрузчики (работают от аккумуляторной батареи) и автопогрузчики (с двигателями внутреннего сгорания).
В конструкциях отечественных электропогрузчиков для питания электродвигателей применяют аккумуляторные батареи, составленные из щелочных железоникелевых аккумуляторов емкостью от 300 до 500А/ч с номинальным напряжением от 24 до 40В. В зарубежных моделях электропогрузчиков нередко используют кислотные аккумуляторные батареи.
Основным грузозахватным рабочим органом электропогрузчиков являются вилы, предназначенные для работы преимущественно с пакетными грузами на поддонах. В отдельных случаях электропогрузчики оборудуют безблочной стрелой, грейфером, штырем. Водители управляют погрузчиками при помощи рулевого колеса, рукоятки регулирования скорости и рычагов управления гидравлическим распределителем [18].
Вилочный погрузчик Clark ECX 55 грузоподъемностью 5500 кг. На таких погрузчиках установлен газовый или бензиновый тип двигателя, и предназначен для проведения погрузочных операций на складских комплексах, в промышленных и торговых организациях, как в закрытых помещениях, так и для работы на открытом воздухе.

Погрузчик на складе.
Электропогрузчик помогает сэкономить время и силы работников при выполнении складских операций. Складские погрузчики имеют одно очень важное преимущество при работе на российских складах - радиус их колес позволяет работать даже при наличии неровностей пола или снежного покрова, что невозможно для штабелеров.
Электрический погрузчик CATEP10KRT. Эргономичный дизайн кабины оператора электрического погрузчика
Caterpillar характеризуется полностью подвесным сиденьем, настраиваемой колонкой руля и удобно расположенными гидравлическими рычагами управления. Функциональная панель управления сообщает водителю погрузчика о врeмeни использования машины и об уровне зарядки аккумулятора. Низкая подножка и удобно расположенные поручни облегчают вход/выход даже в повторяющихся ситуациях.
Номинальная грузоподъемность 1000 кг.

Мини-электропогрузчик
WARUN FE3R10AC ZM400 Грузоподъемность 1000 кг, высота подъема 4000 мм. Ширина погрузчика 850мм, длина 2410 мм, материал колёс, суперэластик (цельнолитые). Мощность двигателя перемещения 3,0 кВт, двигателя подъема 3,0кВт. Аккумуляторная батарея 24/540 В/Ач.
Электропогрузчик RX50-10 - самый компактный электрический заднеприводный погрузчик в своем классе. Широкий спектр применения данного погрузчика не оставит равнодушным никого: работа в производственной зоне, погрузка и разгрузка в грузовом транспорте и контейнерах, работа в различных отраслях промышленности от производства продуктов питания до химической промышленности. Максимальная грузоподъемность 1000кг. Максимальная высота подъема 6070мм. Скорость движения 12,5км/ч.
Напряжение аккумуляторной батареи 24В.

Для выполнения цели проекта и наглядной демонстрации работы робота было принято решение создать модель робота погрузчика в масштабе 1:10. Оснастить робот программным обеспечением. Человек будет выполнять не роль водителя погрузчика, как в настоящее время, а роль оператора для настройки программного обеспечения робота. Обозначить принципы работы модели и проверить, возможен ли такой робот в реальности.
Принцип работы модели робота погрузчика
Робот погрузчик может работать на всех видах промышленных покрытий, не повреждая их, так как передвигается на резиновых колесах. Впереди расположены датчики препятствий и датчик поверхности пола.
На роботе установлена видеокамера, позволяющая оператору осматривать окрестности и вычислять положение робота относительно препятствий, не выходя из диспетчерской. Несмотря на то, что робот оснащен датчиками препятствий, иногда требуется вмешательство оператора для помощи роботу в обходе препятствий, при сбое программы.
Программное обеспечение универсально, может меняться оператором для выполнения конкретной задачи (разгрузка, сортировка, загрузка), также контролирует маршрут и распознает штрих-коды на пакетных грузах.
В блок обработки сигналов стекается вся информация с датчиков, и попадает на цифровые и аналоговые входы контроллера. Блок управления двигателями (драйвер) управляется контроллером, включает или выключает двигатели. Электрическая блок - схема управления роботом показана на рисунке 1.
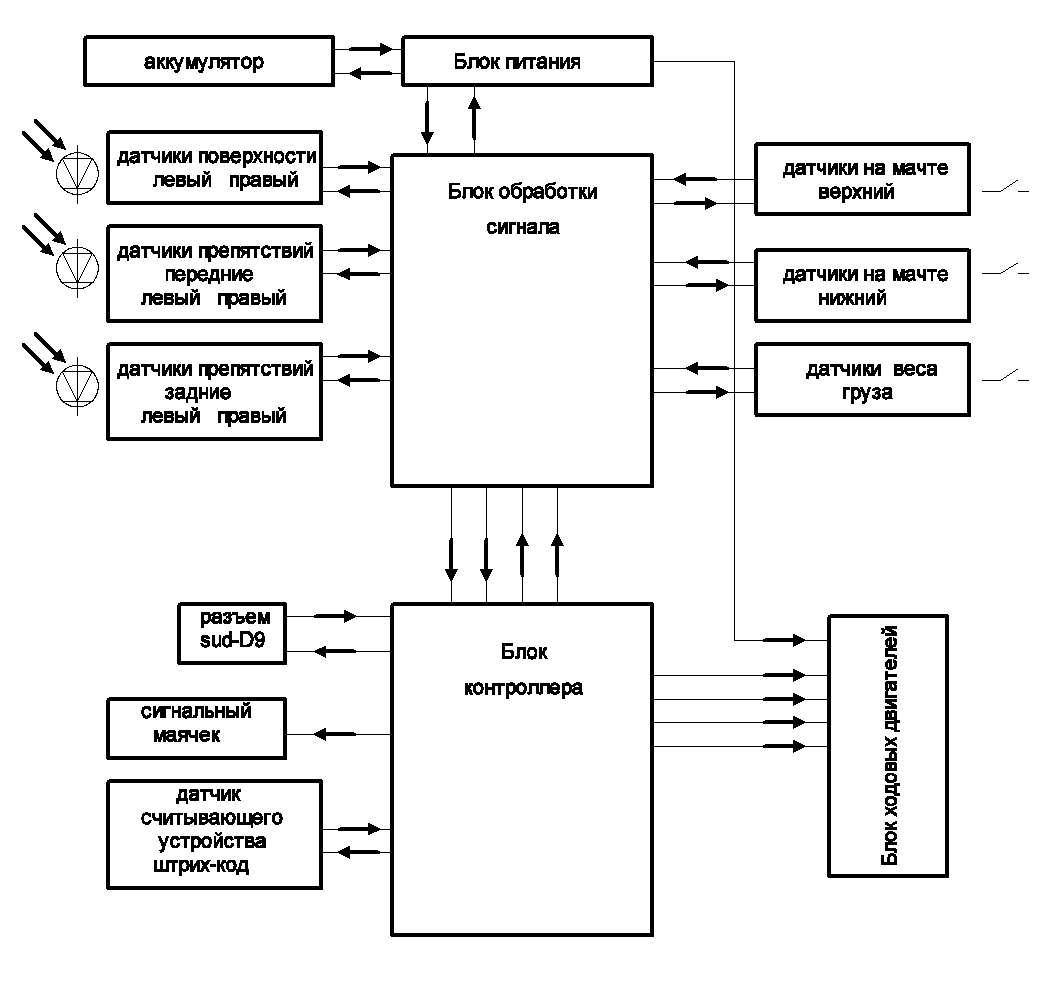
Рис. 1. - Электрическая блок - схема управления роботом
Со своей неспешной скоростью робот погрузчик не представляет опасности для сотрудников склада. Для большего обеспечения безопасности робот оснащен сигнальными маячками оранжевого цвета. При появлении на пути робота человека, он останавливается.
Техническая характеристика робота погрузчика:
Габаритные размеры робота – 180см х160х180 (В х Ш х Д).
Мощность электрического двигателя – 24В, 1000Вт, частота вращения 1750 об/мин.
Рабочий орган – вилы.
Грузоподъёмность - 300кг
Материал корпуса – металл и пластик.
Время автономной работы - до 8 часов.
Скорость передвижения - не более 10 км/ч.
Привод – 4 ведущих колеса.
Наружный габаритный радиус поворота - 3200 мм.
Аккумулятор – 2 х 12В, 120 А/ч.
Вес робота с противовесом - 500 кг.
Объем ОЗУ контроллера для программы – 137 байт из 256.
Тактовая частота контроллера – 16МГц.
Этапы изготовления модели робота погрузчика
Материал и инструмент
Перечень материала и инструмента для изготовления модели робота погрузчика:
Оцинкованная или черная жесть толщиной 0,3мм – 0,4мм, размером 210 х 300мм.
Пластмасса толщиной 3мм, размером 240 х 140мм.
4 колеса, диаметром 60мм, шириной 30мм.
Набор шестеренок для трех трехступенчатых редукторов с передачей вращения от двигателя.
Электрические двигатели постоянного тока – 3шт.
Пруток металлический диаметром 6мм, длиной 400мм.
Гайки М 3 - 12 шт.
Болты диаметром 3мм, длинной 8мм - 12шт.
Проволока диаметром 3мм, длиной 400мм.
Провода для монтажа сечением 0,5мм2 разных цветов, длиной примерно 250см.
Гетинакс фольгированный 1,5мм, размером 170 х 100мм.
Припой ПОС-60 с канифолью диаметром 3мм, длиной 100см.
Паяльная кислота 10мл.
Паяльник 100Вт и 40Вт 220в.
Набор слесарного и монтажного инструмента.
Сверлильный станок. Сверла диаметром 2,5мм, 2,8мм, 3,0мм, 5.0…7,0мм
Резбонарезной инструмент М3 (плашка и метчик).
Наждачная бумага №10, №40 размером 210 х 300мм.
Краска полиакриловая в баллончиках, грунтовка 1 баллон, черного цвета 1 баллон и оранжевого цвета 1 баллон.
Измерительные приборы, мультиметр (тестер) и осциллограф.
Механическая начинка модели робота погрузчика
Фотография модели робота погрузчика находится в приложении 1, рисунок 8.
Все чертежи выполнены в компьютерной программе AutoCad.
Рама погрузчика вырезается из жести по чертежам (приложение 2, рисунок 10). На раме устанавливаются стойки для крепления плат управления и защитного кожуха аккумуляторного отсека робота. В задней части рамы припаивается выключатель питания. Впереди рамы имеются отверстия, для установки датчиков контроля поверхности пола и установки датчиков препятствий. Размеры робота потребовали весьма компактного размещения элементов на раме [1, 6].
Шасси робота изготавливается из жести и состоит из двух независимых друг от друга редукторов на колесном ходу (приложение 3, рисунок 11). Такой способ передвижения имеет преимущество, робот разворачивается практически на месте. На рисунке 2 показано примерное расположение колес, шестеренок и двигателя на раме редуктора.
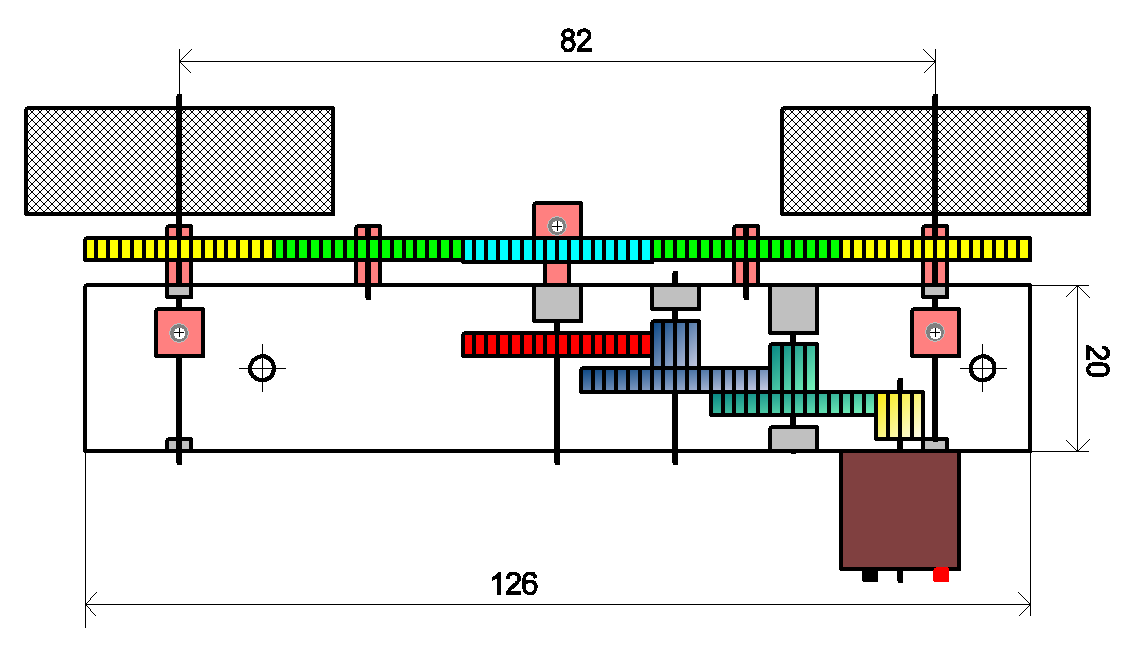
Рис. 2. - Эскиз примерного расположения колес, шестеренок и двигателя
Разметка отверстий для крепления шестеренок на чертеже не приводятся и размечаются по месту, расстояние между центрами зависит от диаметра используемых шестеренок. Вторая рама редуктора изготавливается зеркально (левая, правая).
Защитный кожух (приложение 4, рисунок 12) выпиливается из пластмассы. На него устанавливаются втулки для крепления платы блока драйвера двигателей. Он защищает плату от повреждений аккумулятором.
Колеса из пластмассы или резины, проточки и сверления на стойках под нарезку резьбы, вытачиваются на токарном станке (приложение 5, рисунок 13).
Мачта погрузчика изготавливается из прутков диаметром 6мм, по которым двигаются втулки с площадкой для вил (приложение 6 рисунок 14). Вилы изготавливаются из проволоки диаметром 3мм. Подъем и опускание площадки с вилами осуществляет электрическим двигателем.
Электронная начинка модели робота погрузчика
Все радиодетали использовались от списанной радиоаппаратуры, за исключением контроллера и фотодатчиков.
Блок управления ходовыми двигателями (рисунок 3) построен по классической схеме [3, 34]. Принцип работы прост, сигналы на входе А1 - единица, на А2 - ноль, двигатель вращается в одном направлении. Изменяя входные сигналы на противоположные, вращение двигателя также меняется на противоположное. В роботе таких двигателей два, поэтому движение робота построено по танковой схеме. Такая кинематическая схема позволяет роботу совершать разворот на месте без изменения границ, занимаемой роботом площади. В итоге, он в принципе всегда может выбраться из того места, куда забрался.
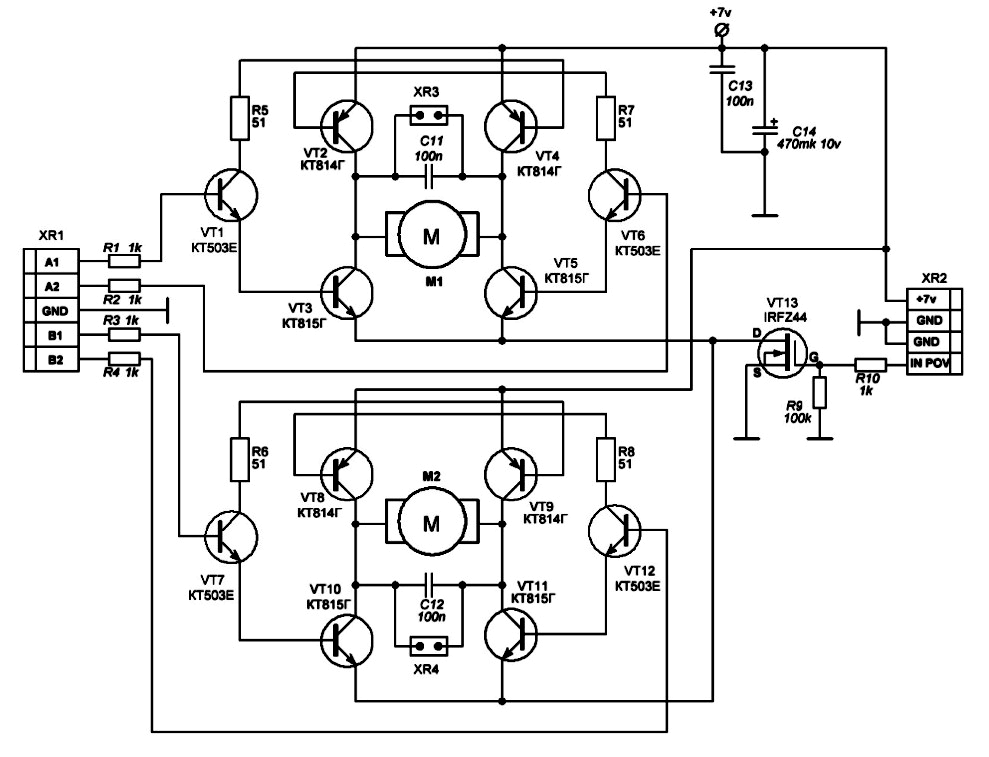
Рис. 3. – Принципиальная схема управления ходовыми двигателями
Блок питания робота [4,59] (рисунок 4). Питание робота осуществляется от аккумулятора 7,2 В. В состав блока питания входит стабилизатор напряжения для питания электроники, блок контроля заряд – разряд аккумулятора, обеспечивает своевременное оповещение оператора, аккумулятор разряжен. Микросхема DD1 применяется как таймер для задержки включения ходовых двигателей. Время задержки 5…6 секунд, за это время оператор робота успевает покинуть поле обзора датчиков и занять место у пульта контроля и управления роботом погрузчиком.
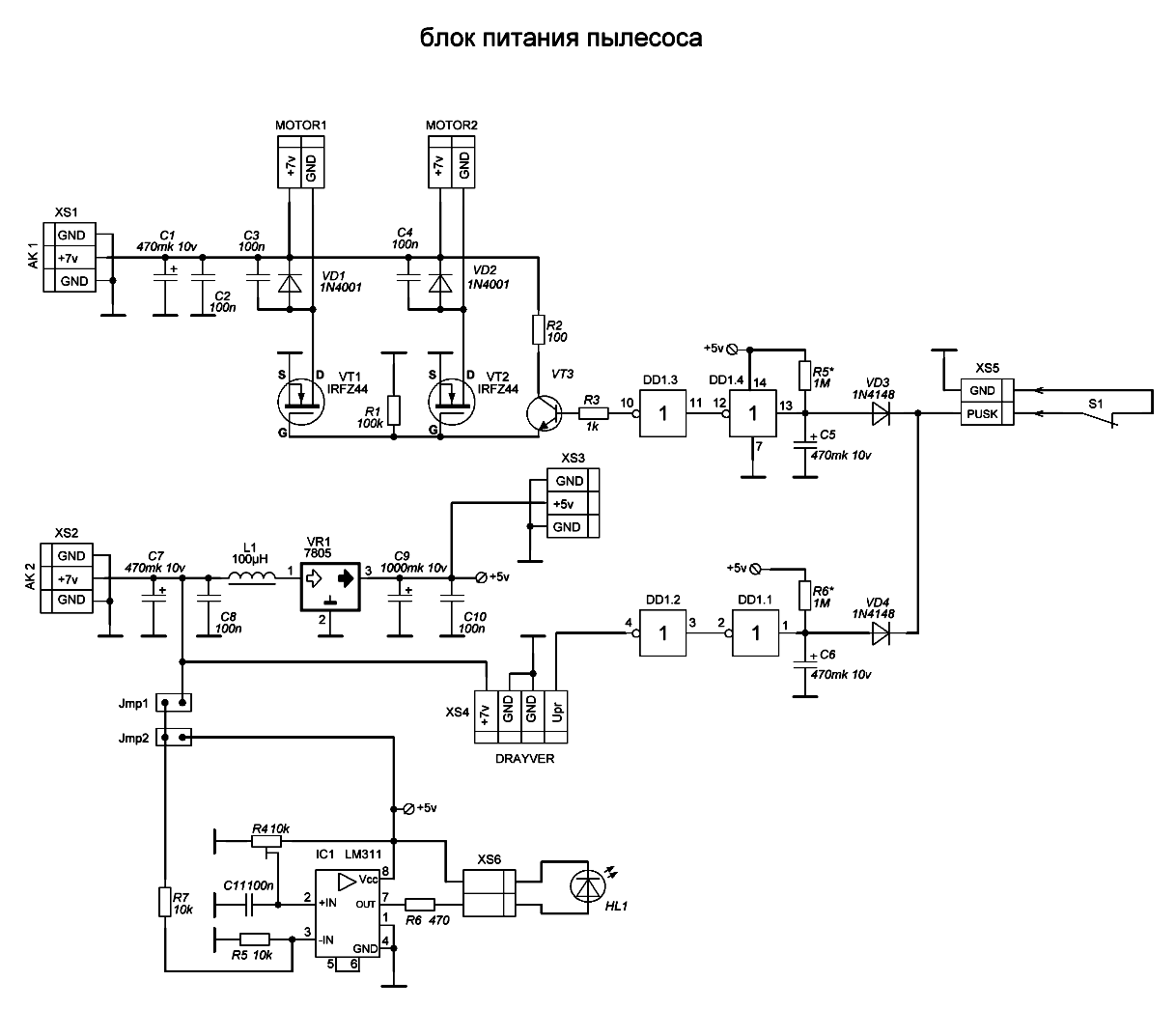
Рис. 4. – Принципиальна схема блока питания
Датчики препятствий (рисунок 5), необходимы для объезда различных видов препятствий [1, 27; 2, 48]. В блоке десять датчиков. Два контактных, расположены на подъемной площадке робота (мачта). Четыре инфракрасных датчика, два датчика (микросхемы DA2 и DA3) находятся впереди и срабатывают тогда, когда перед роботом появляется человек. Еще два – сзади робота, контролируют пространство сзади. Два датчика поверхности (микросхема DA1) установлены на днище робота и контролируют поверхность, по которой робот погрузчик передвигается. В случае выезда робота к обрыву они не позволяют роботу упасть. Робот может преодолевать препятствия (бугры) высотой до 1,5 см при благоприятной форме перехода.
На площадке установлен контактный датчик веса, который контролирует вес поднимаемого груза. В случае превышения допустимой нормы веса робот подаст сигнал оператору. Датчик считывающего устройства штрих-кода использовали заводской.
Диоды VD1 – VD8 выполняют функцию шифратора сигналов, поступающих с датчиков, а микросхема DD1 - преобразования этих сигналов до логических уровней и согласования с микроконтроллером.
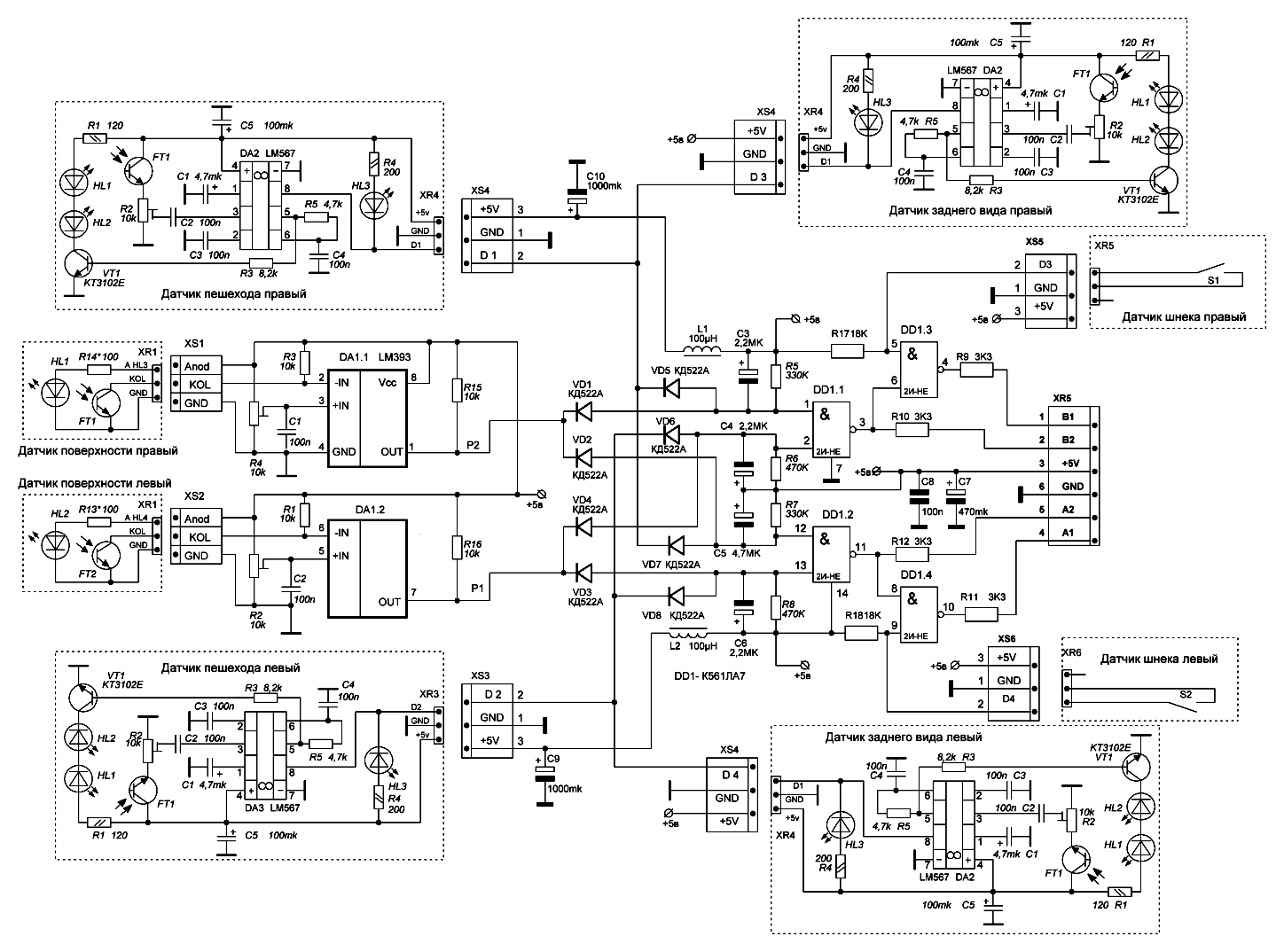
Рис. 5. - Принципиальная схема блока обработки сигнала
Основной блок управления роботом (рисунок 6) [6, 24] построен на контроллере марки ATmega8-PU. В этот блок стекается вся информация с датчиков. В контроллер загружен файл, взятый с сайта «http://edurobots.ru/gotovye-arduino-roboty» через среду программирования ARDUINO ID [14]. Эта программа после корректировки подошла по алгоритму работы для погрузочного робота. В роботе предусмотрен порт UART для приема и передачи данных TTL уровня. Предусмотрен и разъем для перепрограммирования контроллера.
Микроконтроллер ATmega8-PU (DIP 28) сочетает в себе функциональность, компактность и сравнительно не высокую цену [7, 45]. Ниже приведены характеристики микроконтроллера.
EEPROM --- 8 Кб. ОЗУ --- 256 байт. Flash-память --- 8 кБ.
Аналоговые входы (АЦП) --- 4.
Входное напряжение --- 4,5-5 Вольт. Тактовая частота --- 4…16 МГц.
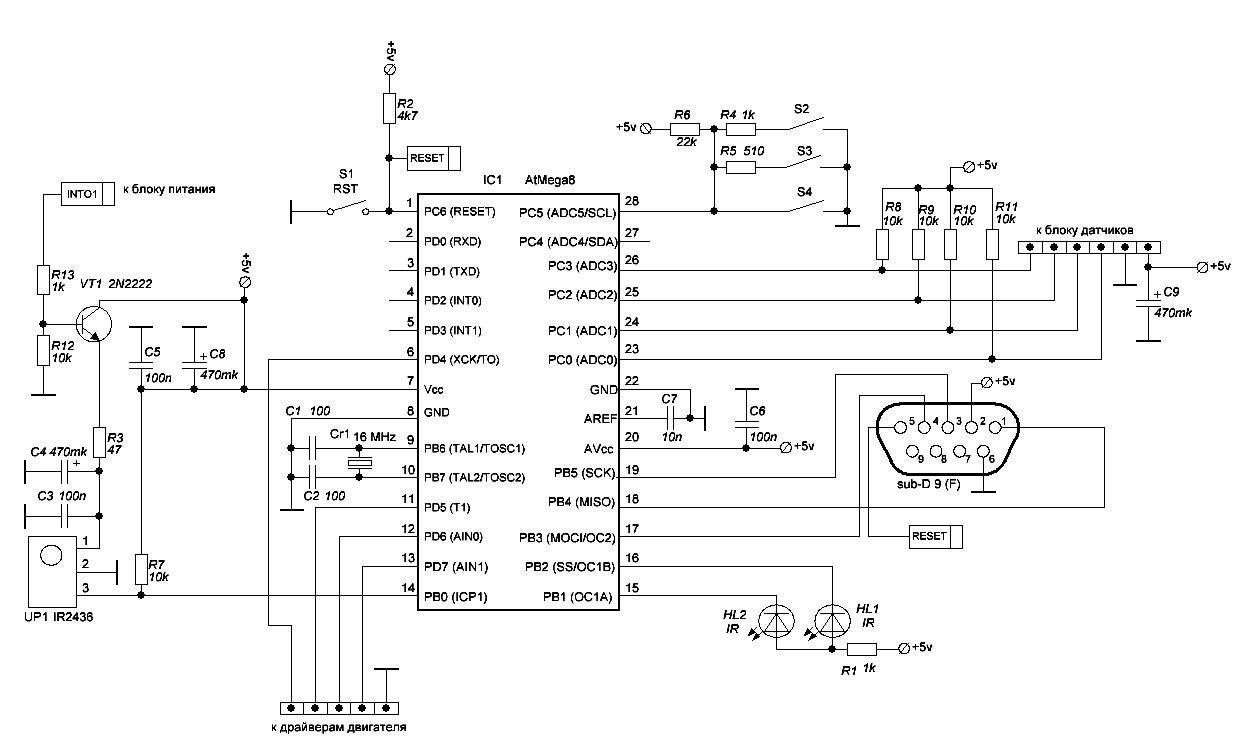
Рис. 6. - Принципиальная схема блока контроллера
Блок сигнализации предназначен для светового оповещения о работе погрузочного робота (рисунок 7). Собран по классической схеме мультивибратора с частотой переключения 10 Гц.
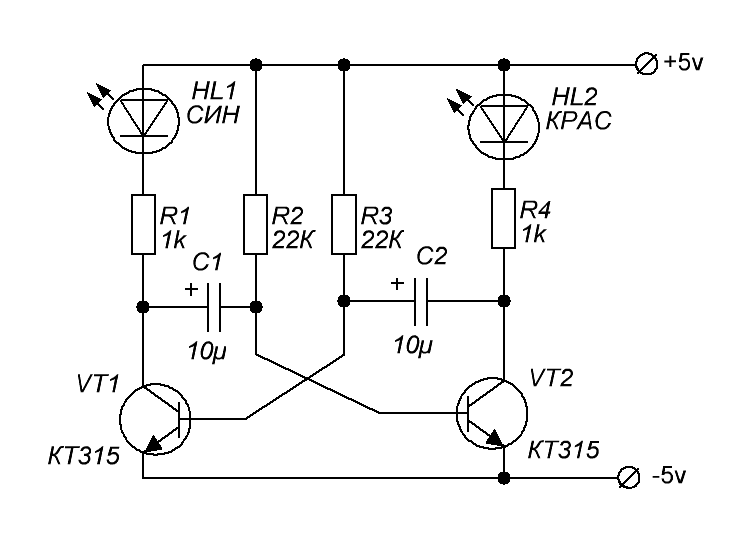
Рис. 7. - Принципиальная схема светового маячка
Все блоки соединяются в одну систему проводами через разъемное соединение.
Испытания модели робота погрузчика
После сборки и отладки электроники проводились испытания модели погрузочного робота на территории виртуального склада (приложение 1, рисунок 9).
При питании робота от аккумулятора 7,2В ток потребления составил 0,8А. Время работы при полностью заряженном аккумуляторе составило 30 мин. За это время он складировал груз весом 200гр на 23 стеллажа, двигаясь по программе загруженной в контроллер. За время работы робот погрузчик не сбивался с намеченного маршрута.
Заключение
Принцип действия робота погрузчика отлично зарекомендовал себя на испытаниях. Такой способ погрузки и разгрузки на складских площадках не только возможен, но и эффективен.
Затраты на изготовление модели робота составили 1636 руб.: аккумулятор NiMH емкость 1800мА*ч, напряжение 7,2В – 1000 руб., контроллер – 200 руб., фотодатчики – 196 руб., краска акриловая – 220 руб.
Низкая себестоимость способствовала разработке модели робота погрузчика, на примере которой наглядно продемонстрирован принцип работы погрузчика для складских помещений, выполнение поставленных задач.
Файл с программой, взятый с сайта и отлаженный в среде программирования ARDUINO обеспечивает правильную и надежную работу всех систем робота.
Благодаря использованию электрических двигателей робот погрузчик не наносит вред экологии.
Хорошая устойчивость робота погрузчика обусловлена низко расположенной аккумуляторной батареи и системой снижения скорости движения на поворотах. Система контроля и программное обеспечение робота погрузчика предотвращает непроизвольное включение робота.
Высокие скорости операций, повышенная проходимость, преодолеваемый уклон и разворот робота погрузчик на месте обеспечиваются не только современными электрическими двигателями, но и раздельными приводами колес. Габаритная высота позволяет эксплуатировать робот в помещениях высотой 2,0 метра.
Установленная видеокамера на роботе дает возможность оператору помочь роботу обойти сложные препятствия, при потере маршрута вернуть робота на место. Возможность выбора оператором режимов работы позволяет повысить эффективность использования погрузчика.
Роботы погрузчики - это новая в промышленности интеллектуальная техника.
Источники информации
Литература:
Ньютон С. Брага. М. Создание роботов в домашних условиях, НТ. Пресс 2007. 186 с.
А.П. Кашкаров. 500 схем для радиолюбителей. Электронные датчики. Наука и Техника. 2008. 288 с.
Р.Аношин. «Робот-жук». Радиодело №3 2006. 59 с.
Оуэн Бишоп. Настольная книга разработчика роботов. Киев. «МК Пресс» 2010. 400 с.
Аксененко М.Д. Приемники оптического излучения. Справочник. 167 с.
Вильяме Д. Программируемый робот, управляемый с КПК.; пер. с англ. А. Ю. Карцева. — М.: НТ Пресс, 2006. 224 с.
Белов А.В. Самоучитель разработчика устройств на микроконтроллерах AVR. Наука и техника, Санкт-Петербург, 2008. 532 с.
Васильева Е.С. канд. экон. наук, доц. РЭА им. Г.В. Плеханова «Справочник экономиста» № 1, 2004. «Понятие производственной структуры и ее составные элементы» 870 с.
Интернет ресурсы:
www.http://radionet.com.ru радиосхемы автоматики.
www.http://alldatasheet.com/ электронный справочник.
www.http://robozone.su робототехника для начинающих.
http://www.railab.ru/images/begin/course/materials/course3/metod3.htm Мобильные минироботы Часть III.
https://www.youtube.com/watch?v=H9-SRB4NsVg видео соревнований мини роботов сумо на Фестивале науки 2010 г.
http://edurobots.ru/gotovye-arduino-roboty/. Готовые Arduino роботы.
http://znamus.ru/page/blue_tooth Технология Bluetooth. Устройство. Принцип действия.
http://delovoymir.biz/ru/articles/view/?did=10087 Производственное предприятие
http://refleader.ru/merujgbewbew.html Организация складского хозяйства на предприятии
Приложения
Приложение 1.

Рис. 8. - Фотография модели робота погрузчика.
Приложение 2.
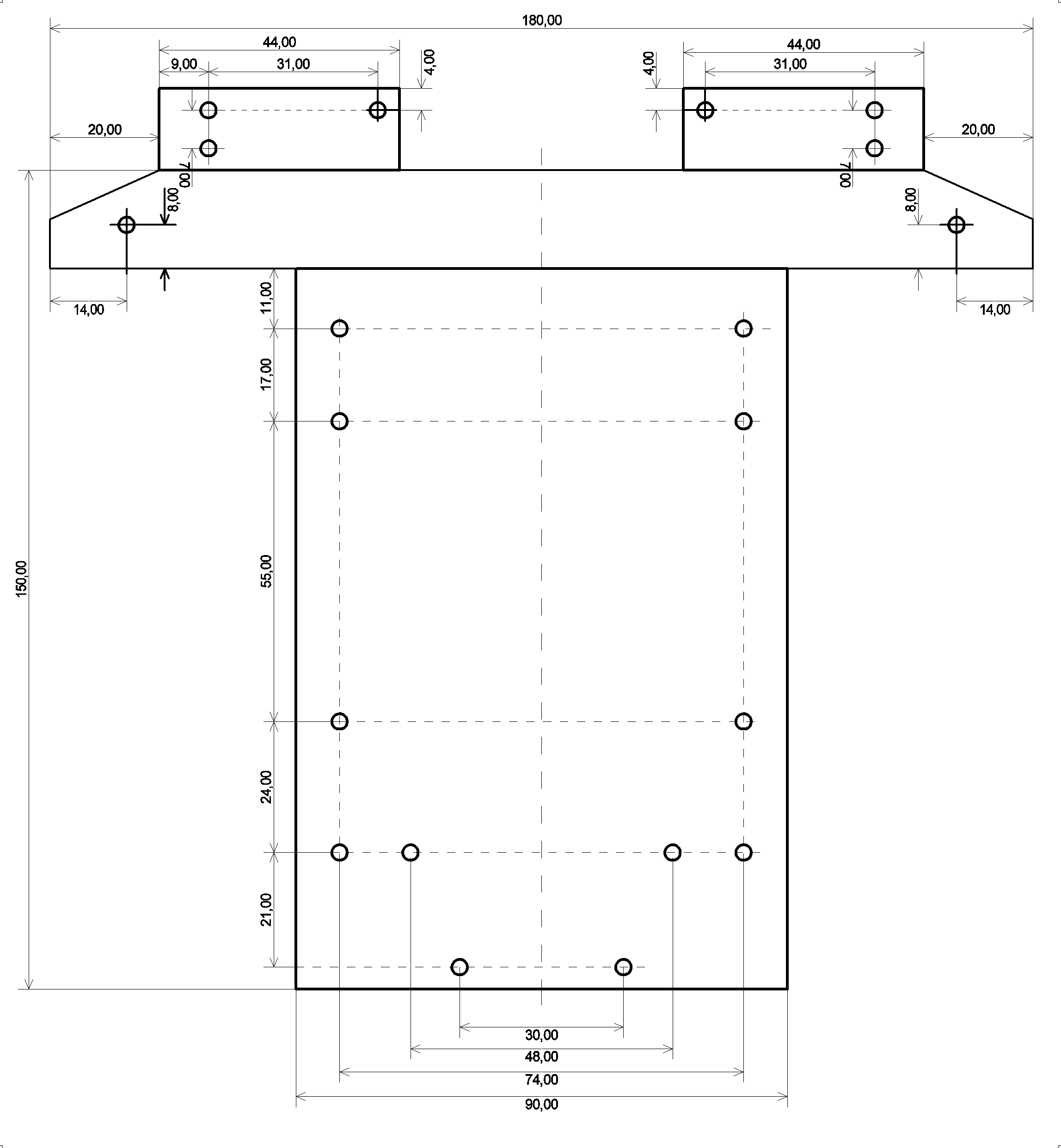
Рис. 10. - Чертеж рамы модели робота погрузчика.
Приложение 3.
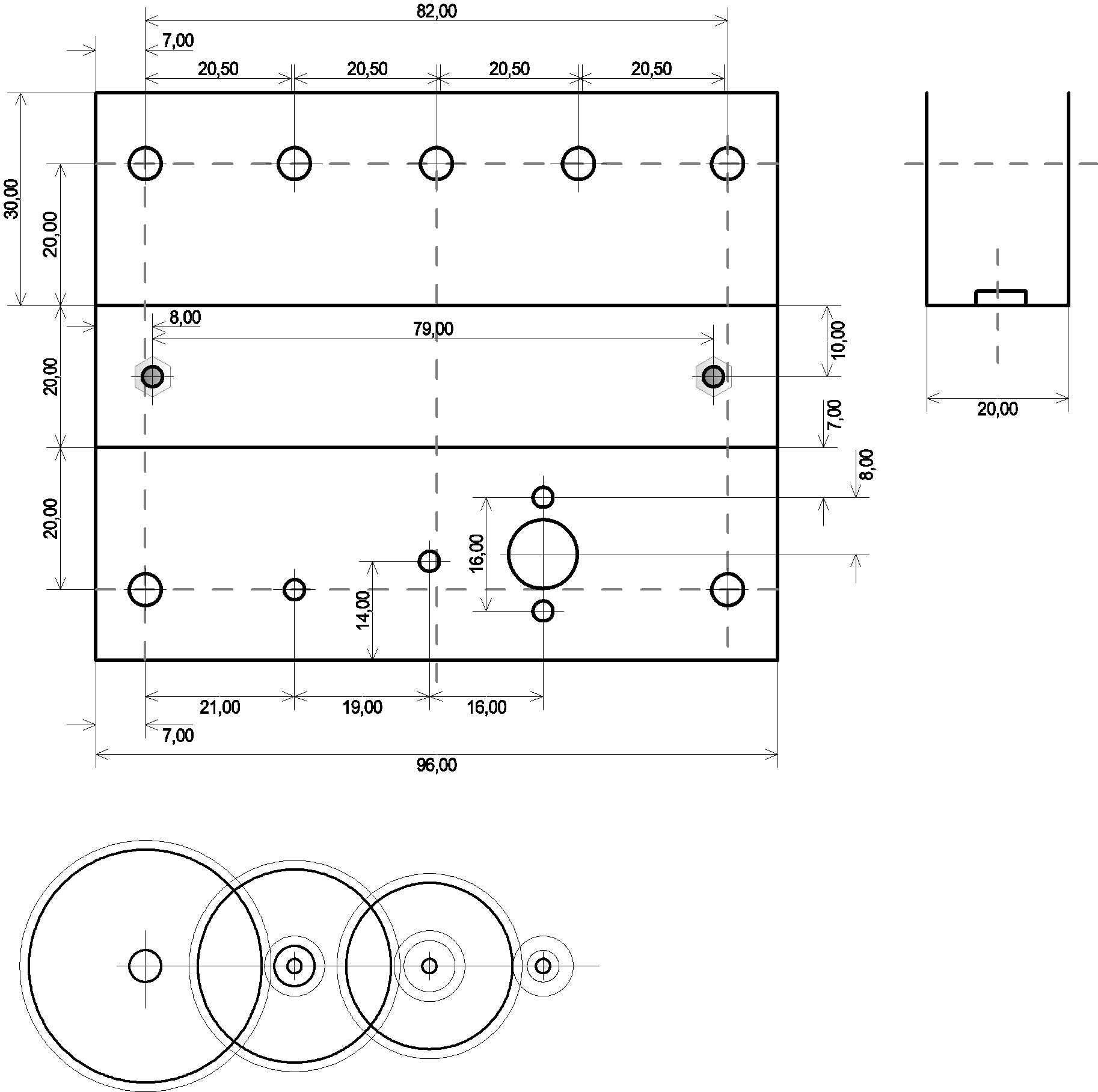
Рис. 11. - Чертеж рамы редуктора для модели робота погрузчика.
Приложение 4.
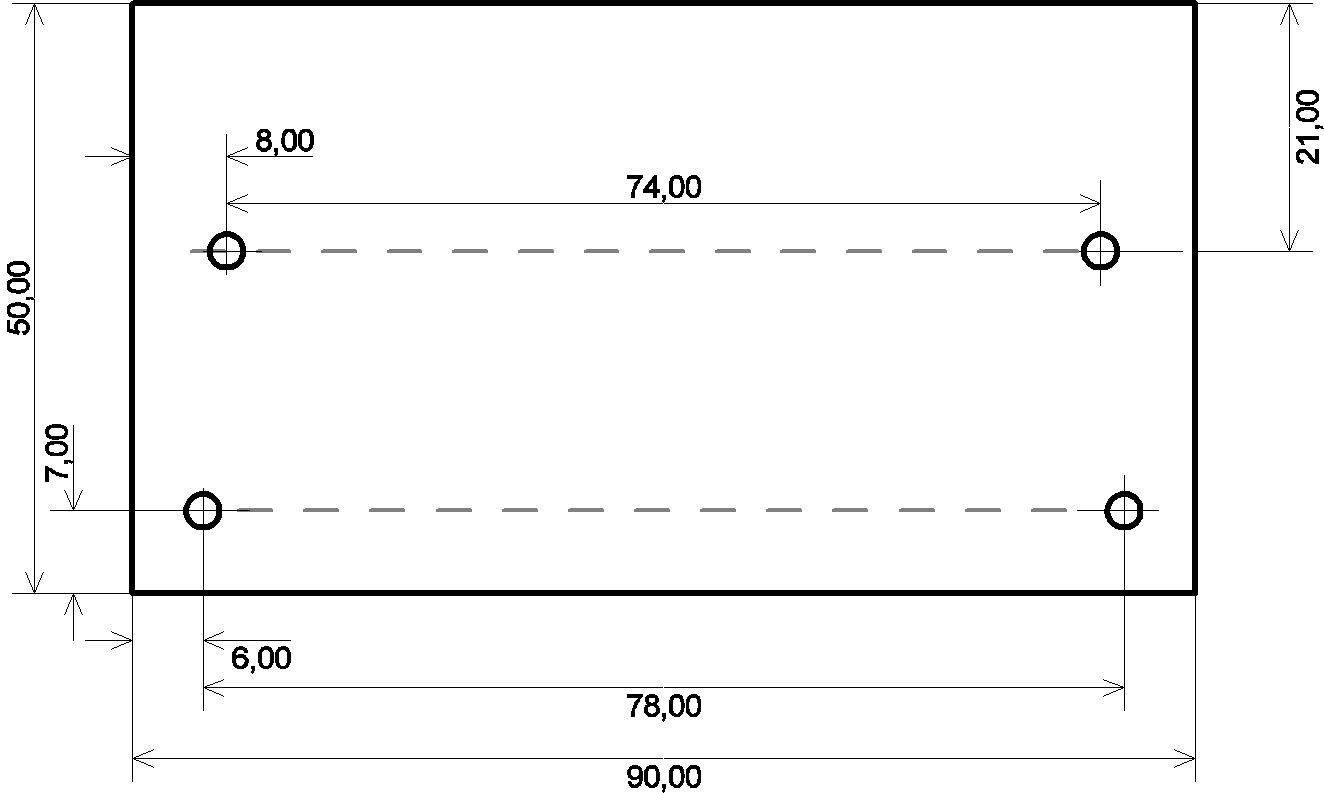
Рис. 12. - Защитный кожух аккумулятора.
Приложение 5.
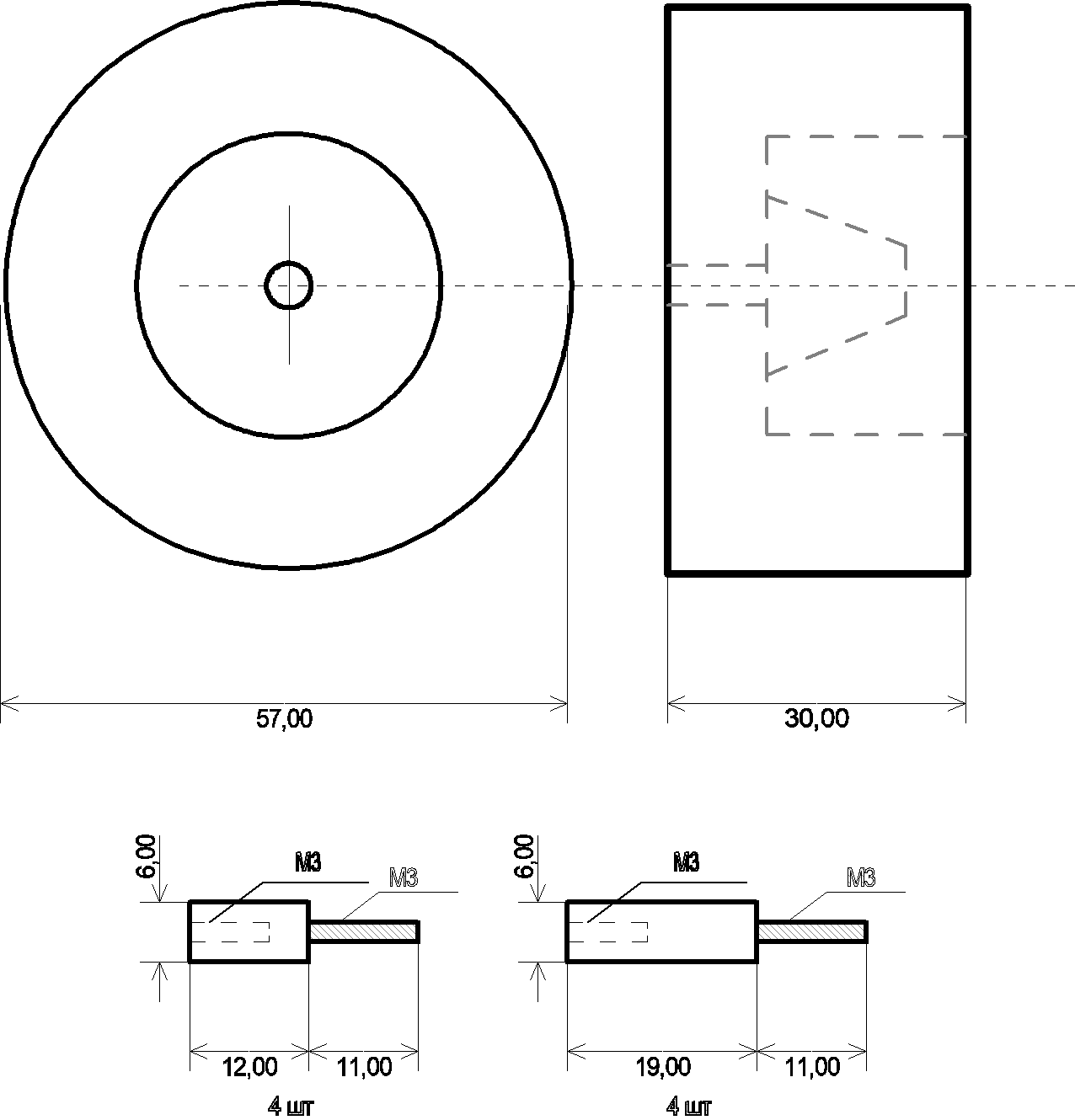
Рис. 13. - Колеса и стойки крепления плат к раме робота погрузчика.







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

