
Россия, Москва


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 10.02.2023 21:59

Багоцкий Евгений Владимирович
репетитор
73 года
Местоположение
Специализация
Статика. Устойчивость равновесия
Категория:
Физика
01.08.2017 04:57

Просмотр содержимого документа
«Статика. Устойчивость равновесия»
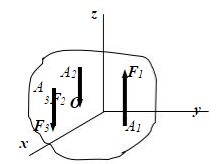
Условия равновесия системы параллельных сил
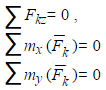
Силы, прилож к свободностоящ телу, м привести к его опрокид как получить усл неопрокид тела, рассм прямоуг параллелеп (весом G), свободно стоящий на гориз шерохо плти (коэф трения f). Найдем усл неопрокид параллелепип под действием силы р (см. Рис).В пред полож равновесия тела (положе, предш его опрокид, когда реакция шерохов поверхности прил в т. A)
![]() ;
;
![]() ;
; ![]() .
.
Тогда условия неопрокидывания примут вид:
а) по величине силы![]()
![]() ; б) по величине плеча
; б) по величине плеча ![]()
![]() ;
;
в) по углу, составл равнодействующей сил P и G с вертикалью
![]() ;г) в общем случае произвольной системы сил
;г) в общем случае произвольной системы сил![]() ,
,
Mуд - удержив момент![]() ;Mопр - опрокидыв момент
;Mопр - опрокидыв момент![]() ;K - коэфф устойчивости.
;K - коэфф устойчивости.
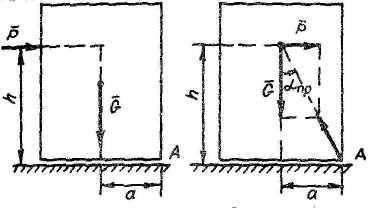
Пр1 Проверка устойчивости крана, если вес поднимаемого груза Gг, вес крана Gк, вес противо-веса Gп, ветр нагрузка Pв. Коэффициент устойчивости д б не менее k = 1,25. Груз подним равно. На рис размеры - в метрах. Gг = 50 кН; Gк = 600 кН; Gп = 25 кН; Pв = 12 кН.
1. Кран без груза Опрокидывание возм вокруг т. A. В положении предельного равновесия реакция Rв = 0. Направление ветра вправо:![]()
![]() ;
;![]()
![]() ;k = 14,0 - кран устойчив.
;k = 14,0 - кран устойчив.
Направление ветра влево:
![]()
![]() ;
;![]()
![]() ;
;
2. Кран с грузом
Опрокидывание возможно вокруг т B. В положении предельного равновесия реакции RA = 0. Направл ветра вправо:
![]()
![]() ;
;
![]() ; k = 0,63 - кран неустойчив.
; k = 0,63 - кран неустойчив.
Вывод: при ветре кран к эксплуатации непригоден.
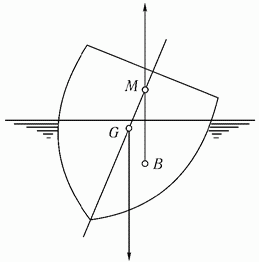
Если ц т выше метацентра, то равновесие неустойчиво, а результир момент от откл стремится увел угол наклона до тех пор, пока корабль не опрокинется.
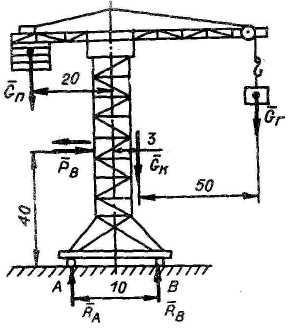
Система 2 параллельных сил на ломаном рычаге (опрокидывание прямоугольника)
Заменим силы P, Q эквивал равнодействующей P+Q делящей концы рычага в от  сводим задачу к эквивал физическому маятнику . Сл А)-качания большой амплитуды –неустойчивое равновесие. Сл б) –качания небольшой ампл справа – большая амплитуда – полное опрокидывание
сводим задачу к эквивал физическому маятнику . Сл А)-качания большой амплитуды –неустойчивое равновесие. Сл б) –качания небольшой ампл справа – большая амплитуда – полное опрокидывание
Статическое равновесие — это такое равновесие когда под действием приложений сил тело находится в состоянии покоя.
Динамическое равновесие — это такое равновесие, когда под действием сил тело не изменяет своего движения
положение равновесия системы q1 = q2 = ...= qs = 0 назыв устойчивым, если всегда м найти такие дост малые начальные знач ![]() , при кот движение системы
, при кот движение системы ![]() не б выходить из любой зад сколь угодно малой окрестн положения равновесия
не б выходить из любой зад сколь угодно малой окрестн положения равновесия ![]() . Для с-мы с 1 ст свободы устойч движение системы м наглядно изобр в фазовой пло=ти (рис. Для устойч положения равновесия движение изобр точки, нач в обл [
. Для с-мы с 1 ст свободы устойч движение системы м наглядно изобр в фазовой пло=ти (рис. Для устойч положения равновесия движение изобр точки, нач в обл [![]() ], не будет в дальн выходить за пределы обл
], не будет в дальн выходить за пределы обл ![]() .
.
Если механич с-ма нах в равновесии в потенц силовом поле, то получ след усл равновесия:
Т Лагранжа - Дирихле: положение равновесия консервативной механич системы устойчиво, если в полож равновесия потенциальная энергия системы имеет изолированный минимум
т1 Кельвина: Наличие диссипат сил не нарушает устойч полож равновесия (система б перемещаться до тех пор пока не уравновесится).
т2 Кельвина: Добавление диссипативных сил увеличивает устойчивость положения равновесия.
т3 Кельвина: Никакими диссипат силами нельзя превратить неустойч положение в устойчивое.
Т2 Томпсона-Кэта. Если состояние равновесия консервативной с-мы устойчиво то при добав-лении диссипативных и гироскопических сил устойчивость сохраняется.
Критерий Сильвестра
Выражение для потениальной энергии системы в обобщенных координатах
| 1 степень свободы | S степеней свободы |
| -обобщенные к-ты жесткости |
чтобы квадратичная форма с вещ коэфф б опред-положит, необх и дост, чтоб все гл диаг миноры А 1г Д2, . . ., Ап матрицы ее коэфф б положит, т. е.
Разложим эту ф в ряд по степ хх и х2. Имеем
усл Сильвестра вып (все ) и поэтому ф V в окр пуля определ положит. на всей пл=ти хгх2 ф V только положительна,
Проверка устойчивости равновесия физического маятника с несколькими пружинами
Пусть есть тело с неподвижной осью вращения (физический маятник) закрепленное в к точках пружинами.
 -жесткость i-пружины, координаты точки закрепления в теле
-жесткость i-пружины, координаты точки закрепления в теле 
координаты точки закрепления (опоры) 2 конца пружины 
 - длина i-пружины в нерастянутом состоянии
- длина i-пружины в нерастянутом состоянии
Предполагаем пружины достаточно длинными, их деформация при повороте маятника – в рамках закона Гука.
Выражение для потенциальной энергии системы в зависимости от угла поворота  имеет вид
имеет вид
Переменная составляющая (зависимость от угла поворота )имеет вид

Периодическая функция лостигает хотя бы одного минимума и максимума.Значит есть по меньшей мере 1 устойчивое и неустойчивое положение равновесия
Пр1 Равновесие маятника с пружиной
Если то вып усл Лагранжа–Дирихле - устойчивое положение равновесия.
Если ![]() т о положение
т о положение ![]() неустойчиво– согласно т 2 Ляпунова
неустойчиво– согласно т 2 Ляпунова
При ![]() явл устойчивым реш – по т Лагранжа–Дирихле.
явл устойчивым реш – по т Лагранжа–Дирихле.
При ![]() устойчиво
устойчиво
Пр2 Маятник с 2 пружинами жесткости с натянутыми силами 
Проверка устойчивости равновесия
Примем угол отклонения маятника влево малым ..Рассматриваем линеаризованные уравнения. Полагаем 
 Из теоремы синусов (рис ниже)
Из теоремы синусов (рис ниже)
Обозначим 
 тогда
тогда
Длины пружин 
левая пружина укоротится на  а правая удлинится на
а правая удлинится на  Новые значения сил упругости пружин
Новые значения сил упругости пружин  =
=
 =
=
их проекции на тангенциальное направление
момент  - будет отрицательным (устойчивое равновесие) при выполнении условия
- будет отрицательным (устойчивое равновесие) при выполнении условия 

определение положений устойчивого равновесия через минимум потенциальной энергии
для прим.2 воспользуемся (1) подставив в нее значения координат, длин, жесткостей
 =0,
=0, =0
=0  тогда
тогда


=
Условие экстремума
2 решения
а)
 б)
б)

Легко убедиться, что функция достигает максимума
при  , т.е неустойчивые положения равновесия
, т.е неустойчивые положения равновесия
и минимума при  т е. устойчивые положения равновесия
т е. устойчивые положения равновесия
Пр3 Физический маятник соединенный с грузом через шкив
Условие равновесия 



Условие равновесия
 потенц энергия не имеет мин при
потенц энергия не имеет мин при 
Нет устойчивого равновесия
53.5 На гладкий цилиндр радиуса r опираются 2 однородных тяжелых стержня, соед шарниром A. Длина каждого стержня 2a. Опр угол 2ϑ раствора стержней, соотв положению равновесия

Пр2 определения положений равновесия и исследования их устойчивости
Рис.2
Рассм механич систему, из трубки AB, кот стержнем OO1 соед с гориз осью вращ, и шарика, кот перемещ по трубке без трения и связан с то A трубки пружиной рис. Опр полож равнов симы и оценим их устойч при след парам: длина трубки l2= 1 м, длина стержня l1 =0,5 м. длина недеформир пружины l0 = 0,6 м , жестк пружины c = 100 Н/м. Масса трубки m2 = 2 кг , стержня - m1 = 1 кг и шарика - m3 = 0,5 кг. Расст OA равно l3 = 0,4 м.
потенц энергии с-мы склад из потен энергии 3 тел, нах в однородном поле силы тяжести, и потенц энергии деформир пружины. Потенц эн тела в поле силы тяжести= произв веса тела на высоту его ц т над пл\тью, в кот потенци энергия счит=0. Пусть потенц энергия=0 в плоскости, проходящей через ось вращения стержня OO1 , тогда для сил тяжести
Для силы упругости потенциальная энергия опр вел деформации ![]()
![]()
Найдем возможные положения равновесия системы. Значения координат в положении равнове-сия есть корни следующей системы уравнений.
Подоб сму ур м составить для любой мех системы с 2 ст сво. В некот сл м получить точное реш системы. Для смы (5) такого реш не сущест, поэтому корни н искать с пом численных методов.
Решая систему трансценд уравн (5), получаем два возм положения равновесия:
Для оценки устойч получ полож равнове найдем все 2е производ от потенц энергии по обобщ координатам и по ним определим обоб коэффициенты жесткости.
![]()
![]()
Тогда для 1 полож равнов
Восп критерием Сильвестра![]()
![]()
Для 2го полож равнов
![]()
![]()
Таким обр, 1е положение равновесия устойчиво, 2е - неустойчиво.
M53.14 Иссл устойчивость вертикального положения равновесия «обращенного двойного маятника, на рис. Маятник м б схематизнр в виде 2 мат точек масс m1 и m2, связ стержнями длин l1 и l2. В вертикальном полож равновесия пружины (жесткости их k1 и k2) не напряжены. M53.16 В маятнике паллографа груз M подвеш на стержне OM, свободно прох через вращ цилиндрик O и шарнирно соед в т A с коромыслом AO1, вращ около оси O1. Длина коромысла r, расст от ц ма груза до шарнира A l, расст OO1=h. Исследовать устойчивое вертикальное поло-жение равновесия маятника. Размером груза и массой стержней пренебречь.Для консервативных сил выполняются следующие тождества:
![]() — ротор консервативных сил равен 0; — работа консервативных сил по произв замкнутому контуру =0;
— ротор консервативных сил равен 0; — работа консервативных сил по произв замкнутому контуру =0; ![]() — консервативная сила явл градиентом некой скалярной функции
— консервативная сила явл градиентом некой скалярной функции ![]() , называемой силовой.
, называемой силовой.
Устойчивость с-мы электрических зарядов
Т Ирншоу Всякая равновесная конфигурация точечных зарядов неустойчива, если на них кр кулоновских сил притяжения и отталкивания не действует иные силы. для сил ньютоновской гравитации у системы из любого числа зарядов при любом их расположении потенциальная энергия взаимодействия не имеет минимума и потому устойчивое статическое распределение электрических зарядов, находящихся на конечном расстоянии др от др невозможно.
из нее б сделан вывод о том, что атом не предст статич (неподв) систему зарядов и что устойч атома м б обесп только непрер движением его частиц — электронов
| Томсоновская модель атома | Модель атома Резерфорда — Бора. |
| 1 — однородно распред положит заряд; 2 — отриц заряд, сконц в центре Раз заряды не могут иметь устойч полож, то,, непр предст вещество постр из статич точечных зарядов (эл-нов и протонов), управл только з нами электростатики. | 1 — положительные ядра в центре; 2 — отрицательные электроны на планетных орбитах. |
.
http://studopedya.ru/1-70321.html







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

