
, ГПОУ "Читинский техникум отраслевых технологий и бизнеса", г. Чита, Забайкальский край


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 02.04.2025 09:45

Батуев Б. Н.
Преподаватель профмодуля
69 лет
Местоположение
Специализация
5 Система произвольных сил
Категория:
Прочее
06.09.2016 15:45

Просмотр содержимого документа
«5 Система произвольных сил»

- ГПОУ «Читинский техникум отраслевых технологий и бизнеса»
Презентация по технической механике
на тему « Плоская система произвольных сил »
- Разработал: преподаватель Батуев Б. Н.
- Чита - 2015

ПЛОСКАЯ СИСТЕМА ПРОИЗВОЛЬНЫХ СИЛ
- Лемма о параллельном переносе силы
- Механическое состояние твердого тела не нарушится, если данную силу перенести параллельно самой себе в произвольную точку тела, добавив при этом пару, момент которой равен моменту данной силы относительно новой точки приложении.
- Возьмем тело, находящееся под действием некоторой системы сил, в числе которых есть сила Р, приложенная в точке А (рис.). Выберем произвольную точку О, которую назовем центром приведения, и на основании аксиомы IV приложим в этой точке две равные силы Б" и Р", параллельные данной силе К, причем
- Систему сил (Р, Р', Б 1 "), эквивалентную силе Р, представим как силу Р, перенесенную параллельно самой себе в произвольно выбранный центр приведения О, и пару (Р, Р"), момент которой равен моменту данной силы относительно центра приведения О, являющегося новой точкой приложения силы:
- М(Р, Я") = Ра = М 0 (Я).
- Лемма доказана.
- Описанный выше перенос силы можно показать на примере. Рассмотрим колесо А радиуса г, вращающееся на оси в подшипниках (рис.). Пусть к ободу колеса по касательной приложена сила Р (такую силу называют окружной).
- Для определения действия силы Р на колесо и подшипники применим доказанную лемму и перенесем эту силу параллельно самой себе на ось колеса. В результате получим силу Р' = Р. вызывающую давление на подшипники, и пару сил (Р, Р") с моментом, равным Рг, которая будет вращать колесо.
- Приведение плоской системы произвольно расположенных сил к данному центру
- Приведением системы сил называется замена ее другой системой, эквивалентной первой, но более простой.
- Теорема. Плоская система произвольно расположенных сил в общем случае эквивалентна одной силе, приложенной в центре приведения, и одной паре.
- Пусть дана плоская система п произвольно расположенных сил (Р 1? Р 2 , Р 3 , ...,?„_!, Р„). Перенесем параллельно все силы в произвольно выбранный в плоскости действия сил центр приведения О, добавив при этом п пар (рис.).
- Моменты этих пар /?/!, т 2 , т 3 , ..., т„ равны моментам данных сил относительно центра приведения О.
- Вместо заданной системы п произвольно расположенных сил мы получили систему п сил, приложенных в центре приведения, равных данным силам по модулю и одинаковых с ними по направлению, и систему п присоединенных пар:
- Эта новая система эквивалентна данной.
- Плоская система сил, приложенных в одной точке, эквивалентна одной силе, которая равна векторной сумме этих сил и приложена в той же точке, следовательно,
- или
- Г = ЕР.
- ж гл ж г
- Эту силу назовем главным вектором данной системы. Главный вектор плоской системы произвольно расположенных сил равен векторной сумме всех сил системы и приложен в центре приведения.
- Графически главный вектор выражается замыкающей стороной силового многоугольника, построенного на данных силах. Аналитически модуль главного вектора можно вычислить по формуле
- а направляющий косинус — по формуле
- Плоская система пар эквивалентна одной паре, момент которой равен алгебраической сумме моментов данных пар, следовательно,
- или
- Эту пару с моментом М гл назовем главным моментом заданной системы сил.
- Главный момент плоской системы произвольно расположенных сил равен алгебраической сумме моментов всех сил системы относительно центра приведения.
- Таким образом, всякая плоская система сил в общем случае эквивалентна системе, состоящей из силы и пары сил, следовательно, теорема доказана.
- Не следует считать, что главный вектор и главный момент имеют чисто формальное значение, введенное для удобства доказательства, и что их можно найти только с помощью вычислений. Нередко отдельно действующие на тело силы определить трудно или невозможно, а главный вектор или главный момент этих сил найти сравнительно легко. Так, например, число точек контакта и модули сил трения между вращающимся валом и подшипником скольжения, как правило, неизвестны, но главный момент этих сил можно определить простым измерением; второй пример: в характеристику электродвигателя входит не сила, с которой статор действует на ротор, а вращающий момент.
- Свойства главного вектора и главного момента
- Свойства главного вектора и главного момента заключаются в следующем: модуль и направление главного вектора данной системы не зависят от выбора центра приведения, так как при любом центре приведения силовой многоугольник, построенный на данных силах, будет один и тот же; величина и знак главного момента в общем случае зависят от выбора центра приведения (кроме одного случая, о котором будет сказано в § 5.4), так как при перемене центра приведения меняются плечи сил, а модули их остаются неизменными;
- главный вектор и равнодействующая системы сил векторно равны, но в общем случае не эквивалентны. Пусть известны главный вектор Р гл и главный момент М гл какой-то плоской системы сил (рис. 5.4). Определим равнодействующую этой системы.
- Пользуясь известным свойством пары сил, преобразуем главный момент М гл так, чтобы силы пары Р и Р Е были параллельны и по модулю равны главному вектору Р гл :
- '",, Р), Рис. 5.4
- причем сила Р приложена к точке О противоположно Р гл .
- Далее систему (Р гл , Г), как взаимно уравновешенную, отбросим:
- (Р гл , Л/ ГЛ НР ГЛ , Р, Р^Р,.
- В результате получили одну силу Р Е , эквивалентную главному вектору и главному моменту, т. е. равнодействующую системы, причем
- Р Г = Р
- * Е * гл'
- Модуль равнодействующей
- а положение линии действия равнодействующей определяется плечом (1 по формуле
- В результате можно считать установленным, что главный вектор и равнодействующая векторно равны, но не эквивалентны;
- 4) главный вектор и равнодействующая эквивалентны лишь в частном случае, когда главный момент системы равен нулю', последнее возможно в случае, когда центр приведения находится на линии действия равнодействующей.
- Из 5.4 видно, что момент равнодействующей Р Е
- относительно центра приведения О равен моменту М гл пары (Р Е , Р), т. е. главному моменту данной системы:
- Так как М ГЛ = ЕМ 0 (Р,-), а за центр приведения можно взять любую точку плоскости действия сил данной системы, то всегда имеем
- Полученная формула является математическим выражением теоремы о моменте равнодействующей.
- Теорема. Момент равнодействующей силы относительно какой-либо точки, расположенной в плоскости действия сил, равен алгебраической сумме моментов составляющих сил относительно той же точки.
- Теорему о моменте равнодействующей впервые доказал французский ученый Вариньон (1654 — 1722), поэтому ее называют теоремой Вариньон а.
- Применим доказанную теорему для определения положения линии действия равнодействующей Р Е плоской системы п параллельных сил:
- (Б\, Р 2 , Р 3 , ..., Р^^Р,. 38
- Выберем какую-либо точку О плоскости действия сил за центр моментов и согласно теореме Вариньона запишем
- где А — плечо равнодействующей ре относительно точки О. Из последнего равенства определяем плечо А\
- так как, согласно § 3.2, ^ = Х^-
- Чтобы установить, в какую сторону от точки О следует на перпендикуляре к линиям действия сил отложить плечо А, следует учесть, во-первых, направление вектора Р Е и, во-вторых, знак ^

Различные случаи приведения плоской системы произвольно расположенных сил
- Изучив свойства главного вектора и главного момента, укажем четыре возможных случая приведения плоской системы произвольно расположенных сил:
- Р гл ^0, М гл ^0, т. е. главный вектор и главный момент не равны нулю. В этом случае система сил эквивалентна равнодействующей, которая равна по модулю главному век тору, параллельна ему, направлена в ту же сторону, но по другой линии действия (см. § 5.3, п. 3).
- Р гл ^0, М гл = 0. В этом случае система сил эквивалентна равнодействующей, линия действия которой проходит через центр приведения и совпадает с главным вектором.
- 3. Р гл = 0, М гл ^0. В этом случае система эквивалентна паре. Так как модуль и направление главного вектора во всех случаях не зависят от выбора центра приведения, то в рассматриваемом случае величина и знак главного момента тоже не зависят от центра приведения, ибо одна и та же система сил не может быть эквивалентна различным парам.
- 4. Р гл = 0, М гл = 0. В этом случае система сил эквивалентна нулю, т. е. находится в равновесии.

Аналитические условия равновесия плоской системы произвольно расположенных сил
Для равновесия плоской системы произвольно расположенных сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на оси координат х и у равнялись нулю и чтобы алгебраическая сумма моментов этих сил относительно любой точки плоскости также равнялась нулю.
Т. е. Σ Х = 0, Σ Y = 0, Σ M = 0.

Для равновесия плоской системы произвольных сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на оси координат х, у и алгебраическая сумма моментов этих сил относительно любой точки равнялись нулю.
Т. е. Σ Х = 0 (1), Σ Y = 0 (2), Σ M = 0 (3).

Для равновесия плоской системы произвольных сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на оси координат х, у и алгебраическая сумма моментов этих сил относительно любой точки равнялись нулю.
Т. е. Σ Х = 0 (1), Σ Y = 0 (2), Σ M(О) = 0 (3).
- Отметим, что выведенные ранее условия равновесия системы сходящихся сил, системы параллельных сил и системы пар являются частными случаями условий равновесия, полученных в этом параграфе.
- При решении некоторых задач бывает целесообразно вместо одного или двух уравнений проекций составлять уравнения моментов.
- Если заменить одно уравнение проекций, то условия равновесия плоской системы произвольно расположенных сил будут выглядеть так:
- Х*=о, ]Гм л =о, ^м в =о.
- Однако следует помнить, что эти условия становятся недостаточными для равновесия, когда центры моментов А и В лежат на одном перпендикуляре к оси х; в этом случае даже при выполнении указанных условий система сил может иметь равнодействующую, проходящую через эти точки, и, следовательно, не быть в равновесии.
- Если заменить два уравнения проекций, то условия равновесия плоской системы произвольно расположенных сил будут выглядеть так:
- Однако эти условия становятся недостаточными для равновесия, когда центры моментов А, В и С лежат на одной прямой; в этом случае даже при выполнении указанных условий система сил может иметь равнодействующую, проходящую через эти точки, и, следовательно, не быть в равновесии.
- Условия равновесия плоской системы параллельных сил являются частным случаем условий равновесия, выведенных в этом параграфе. Если ось у расположить параллельно линиям действия системы параллельных сил, то уравнение равновесия ^Х=0 обратится в тождество, а Х^ = Х^' т - е -алгебраическая сумма проекций сил системы на ось у будет равна алгебраической сумме этих сил. Тогда условия равновесия плоской системы параллельных сил запишутся следующим образом:
- и сформулируются так: для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы алгебраическая сумма всех сил равнялась нулю и чтобы алгебраическая сумма моментов всех сил относительно любой точки плоскости также равнялась нулю.
- Так как все виды аналитических условий равновесия действительны для любых прямоугольных осей координат, то в процессе решения одной задачи или при проверке решения оси координат можно изменить, т. е. одни уравнения проекций сил составить для одной системы координат, а другие — для новой системы координат. Этот прием в некоторых случаях упрощает решение или проверку решения задач. При этом следует помнить, что число уравнений равновесия, составляемых для решения (но не для проверки решения), не должно быть больше числа условий равновесия, соответствующих системе сил, рассматриваемых в задаче.
- При решении задач статики аналитическим способом целесообразно составлять уравнения равновесия так, чтобы в каждом из них была только одна неизвестная величина. Во многих случаях этого можно достигнуть, если рационально выбрать оси координат и центры моментов.

Задача № 2. Вариант 40, схема IV
Балка шарнирно закреплена в точке А и удерживается в горизонтальном положении стержнем ВС, нагружена силами F 1 и F 2 =0,6F 1 . Определить реакцию стержня ВС и шарнира А. Числовые значения своего варианта взять из таблиц. Геометрические размеры балки изобразить в масштабе.
Дано: F 1 = 5кН; F 2 =0,6F 1 = 3кН;
а= 2,8м, в = 0,4м α = 42⁰.
Х А = ? У А = ? R С = ?

Задача № 2. Вариант 40, схема IV
Дано: F 1 = 5кН; F 2 =0,6F 1 = 3кН;
а= 2,8м, в = 0,4м α = 42⁰.
ХА = ? УА = ? RС = ?
Решение: 1) Балку освобождаем от связей и заменяем силами их реакций (реактивными силами) согласно опорных реакций шарниров и невесомых стержней. Эти силы реакции нам необходимо определить.
2) Составляем уравнения равновесия для плоской произвольно расположенной системы сил и решаем их. …
3) Производим проверку правильности решения задачи. …

Домашнее задание. Решить аналогичную задачу №2 в соответствии со своим вариантом. № варианта = № по списку в классном журнале, стр 1. Срок решения = 1 неделя.

Вариант
№ схемы
a
1
I
b
2
м
F 1
I
3
2,3
α⁰
0,5
3,2
I
4
1,2
I
3,8
5
3,3
2,6
65
I
6
2,8
1,2
7
60
I
1,8
1,8
0,8
I
1,8
62
0,2
2,8
8
9
1,4
I
64
1,6
3,3
10
58
2,1
I
1,6
3,6
2,5
55
I
2,5
1,5
52
2,6
1,8
1,2
3,2
0,8
50
48
2,8
45
11
12
II
II
3
13
14
1,5
3
II
2
II
4
3,5
15
II
1,4
16
30
5
2,8
32
II
0,8
17
2,4
6
II
5
18
3,1
0,6
35
1,1
II
40
4
2,7
19
45
II
2,6
3
0,5
20
50
II
1,2
2
2,5
1,5
3
52
3,4
55
1,3
6
2
60
64
21
22
III
23
3,8
III
1,2
24
2,6
III
25
3
2,5
0,5
III
1,2
2,5
70
26
III
2,4
3
27
3,5
0,8
65
III
28
4
1,6
60
III
3,6
4,5
29
55
1,6
III
3,2
3,5
1,2
30
50
III
4,8
1,5
5
2,8
45
III
6
0,5
2,6
40
5,5
1,2
35
2
30
48
31
32
IV
33
2,5
IV
34
0,5
2,4
IV
35
4
IV
3,1
1,4
IV
50
36
3,2
6
1,2
8
1,5
37
3,1
IV
40
5
0,5
38
30
2,5
IV
39
4,5
IV
0,5
2,5
35
1,2
5,5
40
45
3,3
IV
3
1,5
0,8
48
IV
3,5
0,5
55
2,8
2,5
60
0,4
5
65
42

Задача № 1. Вариант 40, схема IV
Определить реакции опор А и В балки, нагруженной, как показано на рис. Данные для своего варианта выбрать из таблиц. Геометрические размеры балки изобразить в масштабе.
Дано: F 1 = 20кН; F 2 =20кН; М=15кН∙м; q=3кН/м
а= 2м, в = 1,5м с = 1,2м.
RА = ? ХВ = ? УВ = ?

Решение: Последовательность решения аналогична предыдущей задаче.
1) Балку освобождаем от связей и заменяем силами их реакций (реактивными силами) согласно опорных реакций шарниров и невесомых стержней. Эти силы реакции нам необходимо определить.
2) Составляем уравнения равновесия для плоской произвольно расположенной системы сил и решаем их.
…
3) Производим проверку правильности решения задачи.
…

Домашнее задание. Решить аналогичную задачу №1 в соответствии со своим вариантом. № варианта = № по списку в классном журнале, стр 1. Срок решения = 1 неделя.

Вариант
№ схемы
1
a
I
м
2
b
1,5
3
I
c
1,2
4
I
1,5
F 1
1,5
2,3
2
5
I
кН
F 2
0,8
1,8
12
1,5
I
6
M
1,4
2,4
20
2,2
кН*м
10
I
7
q
16
2,5
40
1
кН/м
6
8
1,2
I
8
8
2,3
2,6
2
9
8
20
I
10
25
10
6
10
1,8
2,5
I
0,5
15
0,5
0,8
12
10
12
I
2,5
1,2
10
14
2,1
40
1,1
18
5
20
3,5
3,2
8
8
6
12
20
0,5
5
15
8
5
24
10
10
12
12
10
10
11
12
II
II
13
2,4
14
II
2,5
2,6
2,4
II
0,5
15
2,4
2,3
0,8
20
16
2,2
II
1,8
18
II
2,3
1,2
17
1,8
II
6
1,8
18
1,8
1,2
16
2,2
II
2
8
15
1,8
19
12
6
1
1,6
II
20
8
14
1,5
1,6
5
12
2,1
6
10
II
2
15
1,2
5
14
8
1,5
2,2
1,4
8
2
1,2
6
18
13
1,4
10
12
5
1,5
12
0,8
15
4
15
1,4
12
7
1,4
12
4
3
21
22
III
23
1,4
III
1,5
24
1,8
III
25
2,5
III
1,8
1,4
10
26
2,5
2,5
2
III
12
2
1,5
27
1,4
12
III
12
1,1
28
1,2
20
10
III
1,2
4
1,5
29
14
13
14
2,1
III
2,5
30
11
1,5
20
III
2
1,5
18
0,8
3
10
0,8
1,5
22
1,3
22
III
3,5
12
5
1,3
18
1,3
8
1,2
4
12
6
1,2
13
1,2
14
10
3
14
10
2
15
12
5
16
12
4
10
4
31
IV
32
0,8
33
IV
1,5
34
IV
1,8
0,8
35
0,5
1,8
IV
8
0,6
IV
36
0,9
0,9
0,8
10
37
1,5
0,5
IV
10
14
0,5
38
0,5
0,5
18
IV
12
1,5
39
2
15
1,2
20
0,9
12
IV
18
1,5
1,5
40
1,6
10
IV
16
3
4
18
1
16
2,5
1
IV
8
2,5
2,5
10
5
16
10
2
1,1
2
1,5
14
8
12
12
3
1,2
12
12
18
4
16
20
5
10
20
2
15
3

- Пример 1. Горизонтальная балка, поддерживающая балкон, подвергается действию равномерно распределенной нагрузки интенсивностью q =2 кН/м. На балку у свободного конца С передается нагрузка от колонны Р=2 кН. Расстояние от оси колонны до стены l =1,5м. Определить реакции заделки А .

Дано: q =2 кН/м
Р=2 кН
l =1,5м
R = ?
т = ?
Решение:
Отбросим заделку, заменим ее реакциями и рассмотрим равновесие балки. Реакции стены представляют собой реактивную силу R и реактивный момент т. Реактивная сила вертикальна, так как активные силы, действующие на балку, горизонтальных составляющих не имеют. Распределенную нагрузку заменим ее равнодействующей ql .

- Решение. Отбросим заделку, заменим ее реакциями и рассмотрим равновесие балки. Реакции стены представляют собой реактивную силу R и реактивный момент т. Реактивная сила вертикальна, так как активные силы, действующие на балку, горизонтальных составляющих не имеют. Распределенную нагрузку заменим ее равнодействующей ql .

Применим условия равновесия плоской системы параллельных сил и составим два уравнения равновесия:
Σ Fi = 0; R – q l – P = 0, откуда R = ql + P = 2 ∙10 3 ∙1,5 + 2∙10 3 = 5∙10 3 Н;
Σ M(A) = 0; m- q ll /2 - Р l =0, откуда т = Р l+ql 2 /2 = 2 ∙ 10 3 • 1,5 + 2 • 10 3 • 2,25/2 = 5,25 • 10 3 Н ∙ м.
Проверка решения, составив контрольное уравнение моментов относительно точки С:
ΣM(C) = 0; m - Rl + ql 2 /2 =0. Подставив значения, получим
5,25•10 3 – 5•10 3 •1,5 + 2•10 3 - 2,25/2 = 0. Полученное тождество 0 = 0 свидетельствует, что решение верное.

- Пример 2. Предохранительный клапан А парового котла соединен стержнем АВ с однородным рычагом СО длиной 50 см и силой тяжести 10 Н, который может вращаться вокруг неподвижной оси С; диаметр клапана d=6 см, плечо СВ = 1 см. Какой груз G нужно подвесить к концу D рычага для того, чтобы клапан сам открывался при давлении в котле p=110Н/см 2 ?

- Дано: СD = 50 см
- F = 10 Н
- d=6 см
- СВ = 7 см
- p=110Н/см 2
- G - ?

- Решение. Рассмотрим равновесие рычага СD. Реакция R в клапана будет направлена вверх и равна
- R в = pπd²/4 = 110 ∙ 10⁴ π36 ∙ 10⁻⁴/4 = 3109 Н
- Так как реакцию R с шарнира С определять не нужно, то составим уравнение моментов относительно точки С:
- ΣMc = 0; -G ∙ CD – F ∙ CD/2 + R в ∙ CB = 0.
- Подставим значения и определим G:
- G = (3109 ∙ 7 ∙ 10⁻ 2 - 10 ∙ 25 ∙ 10⁻ 2 )/(50 ∙ 10⁻ 2 ) = 430Н.

- Пример 3. На рис. схематически изображен подъемный кран. В точке D на расстоянии 5 м от оси АВ крана подвешен груз P=50кН. Сила тяжести крана G = 30 кН. Определить реакции подпятника А и подшипника В.
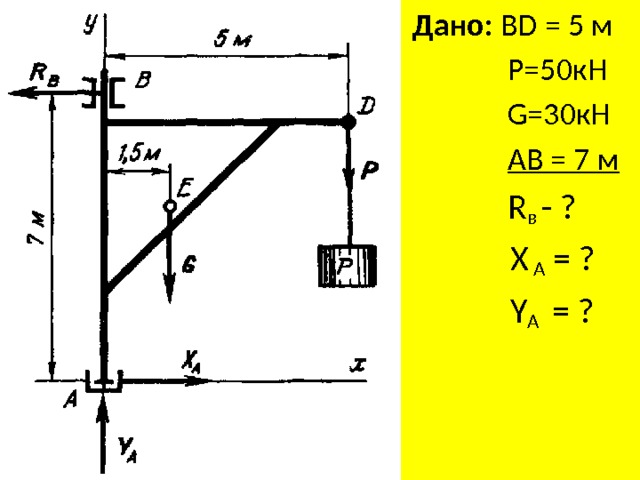
- Дано: ВD = 5 м
- P=50кН
- G=30кН
- АВ = 7 м
- R в - ?
- X A = ?
- Y A = ?
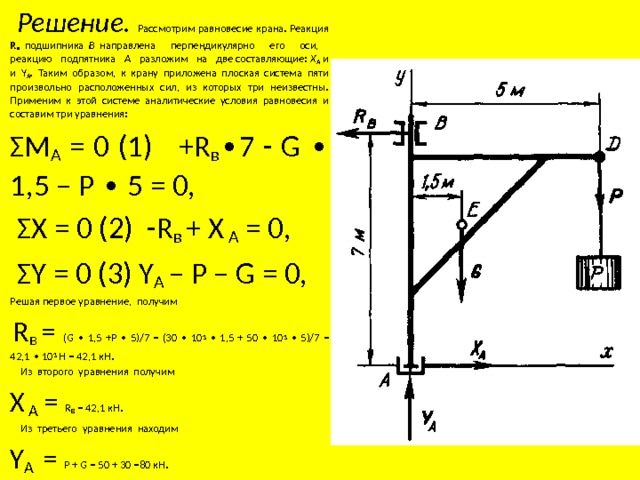
- Решение. Рассмотрим равновесие крана. Реакция R в подшипника В направлена перпендикулярно его оси, реакцию подпятника А разложим на две составляющие: Х А и и Y А . Таким образом, к крану приложена плоская система пяти произвольно расположенных сил, из которых три неизвестны. Применим к этой системе аналитические условия равновесия и составим три уравнения:
- ΣМ A = 0 (1) +R в ∙7 - G ∙ 1,5 – Р ∙ 5 = 0,
- ΣX = 0 (2) -R в + X A = 0,
- ΣY = 0 (3) Y A – P – G = 0,
- Решая первое уравнение, получим
- R в = (G ∙ 1,5 +P ∙ 5)/7 = (30 ∙ 10 3 ∙ 1,5 + 50 ∙ 10 3 ∙ 5)/7 = 42,1 ∙ 10 3 Н = 42,1 кН.
- Из второго уравнения получим
- X A = R В = 42,1 кН.
- Из третьего уравнения находим
- Y A = P + G = 50 + 30 =80 кН.

- Задача. Определить реакции опор нагруженной балки.
Дано: а = 2 м, b = 3 м, c = 1,5 м, F1 = 20 кН, F2 = 10 кН, М = 12 кН∙м, q = 4кН/м.
R А - ? (Х А - ? Y A - ?)
R В - ?

Решение:
1) На расчетной схеме расставляем направления опорных реакций.
2) Записываем общее условие равновесия:
Σ Х = 0 (1), Σ Y = 0 (2), Σ M = 0 (3).
3) Применительно к схеме записываем уравнения равновесия:
(1)… (2)… (3) …
Последовательно решаем уравнения с одним неизвестным
4) Проверяем правильность решения:
Σ M = 0 (3).

Задача. Определить реакции опор нагруженной балки.
а = 2 м, b = 3 м, c = 1,5 м,
F1 = 20 кН, F2 = 10 кН, М = 12 кН∙м, q = 4кН/м.
R А - ? (Х А - ? Y A - ?) R В - ?



Домашнее задание. Решить 3 задачи.
См методичку, стр. 28. Задачи 11 – 20. Свой вариант (№ в кл. журнале, +20, +40) выбрать из табл. 5 на стр. 30-32, столбца 2.
Свою схему выбрать на стр. 29, рис. 11.
Приятного решения !

Срок сдачи и защиты 1й задачи – на след. занятии, 2й, 3й задач– через неделю

Методичка,
стр. 29,
рис. 11

- Список использованных источников
- 1. Эрдеди А.А. Техническая механика: Теоретическая механика. Сопротивление материалов. М.: 2005.
- 2. Автор и источник заимствования неизвестен.

Конец






Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

