
Россия, Калининград


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 08.09.2025 20:01

Волощук Анастасия Александровна
Учитель математики и информатики
25 лет
Местоположение
Специализация
Анализ алгоритмов движения робота в соревновании Сумо
Категория:
Информатика
17.03.2021 01:35

Файл содержит:
- Программа для робота-сумоиста (LEGO MINDSTORMS EV3)

- Анализ этой программы (плюсы, минусы, выводы);
- Особенности робота-сумоиста, а также шаги выполнения программы;
- Замечания о конструкции робота.
Просмотр содержимого документа
«Анализ алгоритмов движения робота в соревновании Сумо»
Анализ алгоритмов движения робота в соревновании Сумо
Особенности робота для сумо и выполнения ниже представленной программы
Робот должен вращаться вокруг своей оси, пока впереди расположенный датчик не обнаружит противника;
Робот должен остановиться напротив противника;
Робот должен по весу и размерам соответствовать правилам соревнований по категориям. В связи с этим робот должен иметь максимально разрешенный размеры, вес. Также важны мощность моторов и устойчивость (сцепление с поверхностью поля);
Базовое поведение робота сумо достаточно очевидно: роботу нужно найти внутри поля противника и вытолкать его за пределы круга.
Для поиска противника необходимо использовать инфракрасный или ультразвуковой датчик. Для определения границ поля нужно установить датчик света.
Безусловно, роботу-сумоисту необходим выталкивающий элемент.
Конструкция робота
Должна содержать следующие элементы: 2 больших мотора, 2 датчика – инфракрасный и датчик цвета.
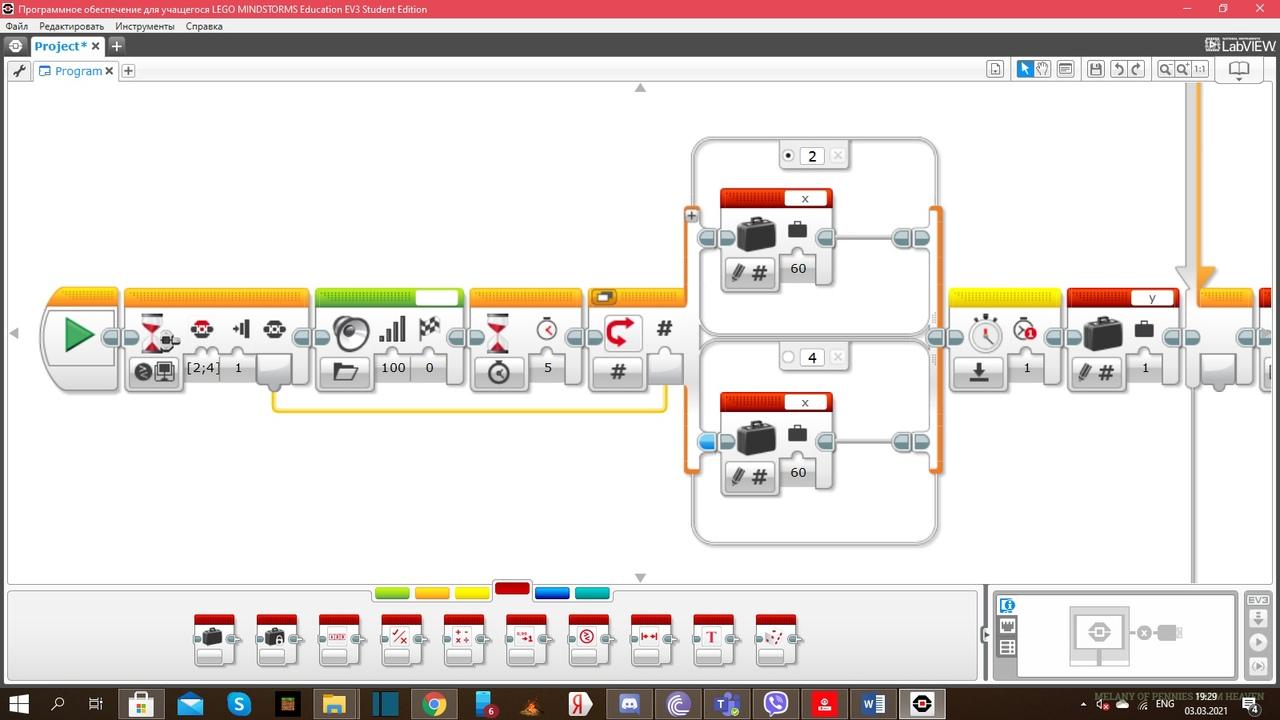
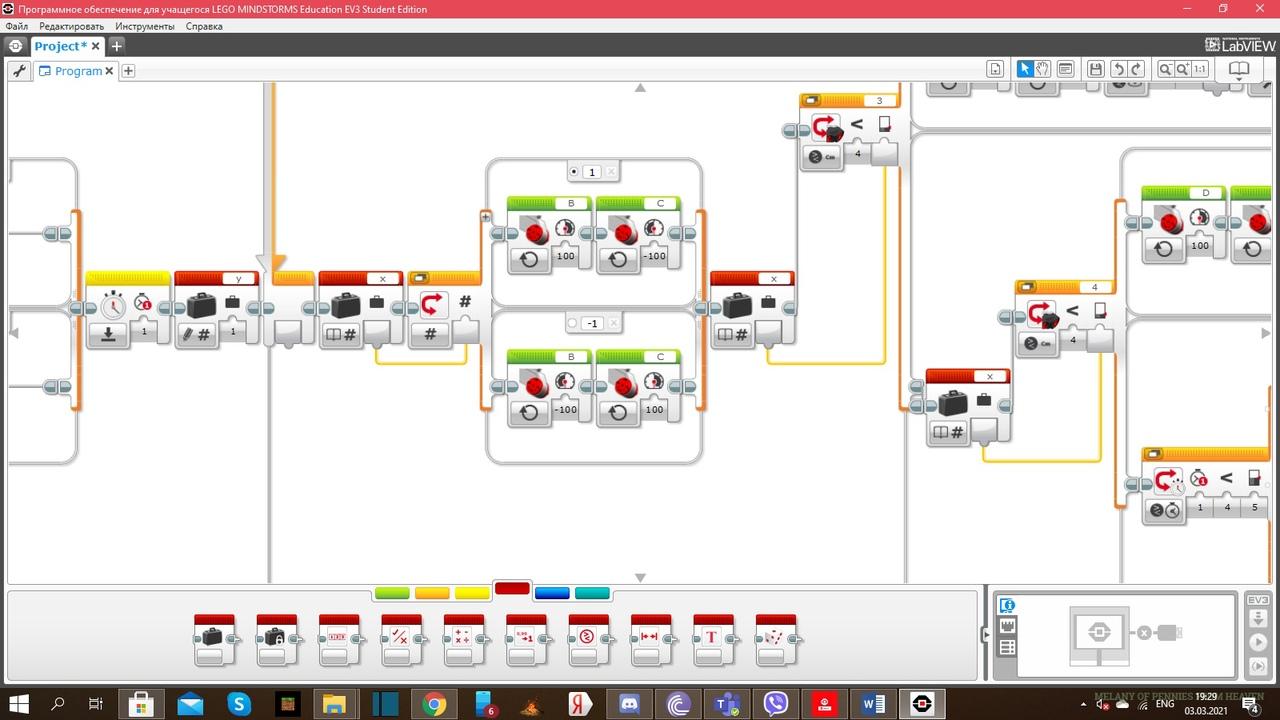
Программа
Робот ждет 5 секунд (программный блок «Ожидание»;
Робот издает звуковой сигнал (программный блок «Звук»);
Робот начинает цикл движения (программный блок «Цикл» - режим работы «Неограниченный»);
В переключателе определяется цвет, который передается от датчика цвета. По умолчанию идем в ветку «нет цвета». Если датчик определил черный цвет, переходим к ветке «черный цвет».
В ветке «черный цвет» робот отъезжает 2 оборота назад (программный блок «Рулевое управление» - режим работы «Включить на количество оборотов»);
В ветке «нет цвета» добавляем переключатель для определения расстояния до противника и последующих действий (режим работы «Инфракрасный датчик- Сравнение – Приближение»);
Если расстояние от робота до препятствия менее 60 ед., тогда идем по ветке «Истина», если больше 60 ед., идем в ветку «Ложь»;
В ветке «Истина» добавляем программный блок «Рулевое управление», режим работы «Включить» (робот едет на противника);
В ветке «Ложь» добавляем программный блок «Независимое управление моторами», режим работы «Включить» и выставляем противоположные по значению мощности на 1 и 2 моторы (робот будет крутиться на месте пока расстояние до противника не станет меньше 60 ед.).

Анализ программы
Для полной «картины» анализа программы необходимо проведение испытаний робота и отладка: первичный запуск, отладка, проведение соревнований.
Однако даже без этого можно отметить важные аспекты робота и программы для сумо:
Робот должен по весу и размерам соответствовать правилам соревнований по категориям. В связи с этим робот должен иметь максимально разрешенный размеры, вес. Высота робота наоборот должна быть минимальной (для манёвренности).
Лучше установить 3 колеса с каждой стороны (всего 6) и мощные моторы, а также защищающие элементы (своеобразные «щиты»);
Минимальное количество датчиков для робота-сумоиста =2, однако можно установить по 2 спереди и сзади (всего 4). Это поможет быстрее обнаружить противника, ведь в сумо чаще всего выигрывает тот робот, который первый обнаружил соперника;
Программа требует отладки и совершенствования до проведения соревнований.








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

