
Россия, Каменск-Шахтинский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 17.04.2026 10:21

Барышев Евгений Валентинович
педагог дополнительного образования
61 год
Местоположение
Специализация
«Беспроводной модуль Bluetooth»
Категория:
Прочее
14.02.2026 16:34

Просмотр содержимого документа
««Беспроводной модуль Bluetooth»»
Муниципальное бюджетное учреждение
дополнительного образования «Станция юных техников»
города Каменск-Шахтинский
(Для учащихся робототехнических объединений учреждений дополнительного образования)
Автор: Барышев Е. В.
педагог дополнительного образования.
Пояснительная записка.
Данная методическая разработка предназначена для ознакомления учащихся с основным принципам работы и подключения беспроводного модуля Bluetooth к Arduino. Содержание методической разработки содержит описание принципа работы модуля и создания программного кода для модели робота.
Методическая разработка является приложением к образовательной программе «Робототехника» и направлена на достижение следующих целей и задач:
Образовательные:
научить основным принципам передачи сигнала по радиоканалу, Bluetooth;
способствовать формированию знаний и умений в области связи.
Развивающие:
способствовать развитию креативности, нестандартного мышления и пространственного воображения;
способствовать развитию творческих способностей, фантазии и эстетического вкуса.
Воспитывающие:
способствовать формированию потребности к осознанному использованию компьютерных технологий при обучении в школе и в повседневной жизни;
воспитание чувства взаимоуважения между кружковцами.
Принцип работы и подключение bluetooth-модуля к Arduino.
Подключим беспроводной модуль Bluetooth к Arduino и научимся получать с него данные и передавать на него данные с компьютера.
Hам понадобится:
Arduino;
модуль bluetooth;
компьютер;
соединительные провода.
Описание модуля bluetooth HC-06
Существует большое количество реализаций модулей Bluetooth. Каждая имеет свои особенности, но, в общем и целом они все очень похожи. Рассмотрим представителя bluetooth модуля семейства HC-06.
Данный модуль работает на частоте от 2,40ГГц до 2,48ГГц и поддерживает спецификацию bluetooth версии 2.1+EDR: пониженное потребление энергии, повышенный уровень защиты данных и лёгкое соединение Bluetooth-устройств. Устойчивый приём с модулем гарантирован в пределах 10 метров.
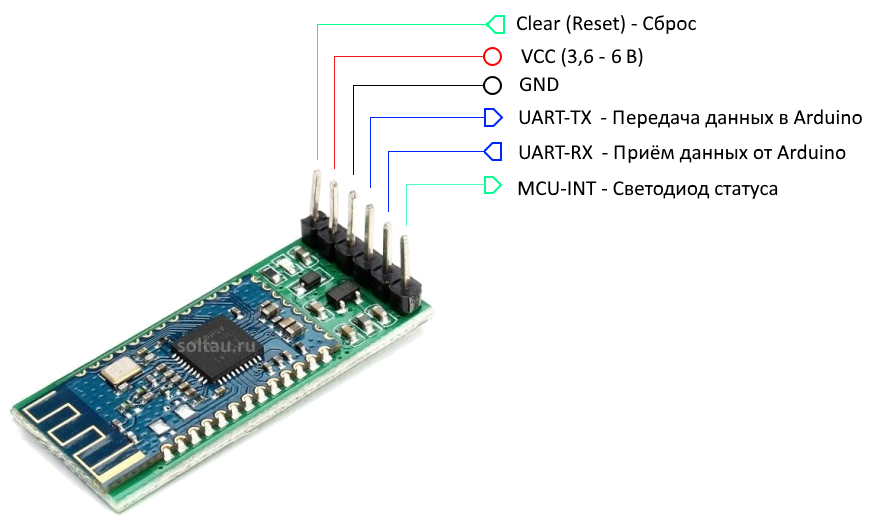
Назначение выводов bluetooth-модуля HC-06
Назначение выводов bluetooth-модуля такое:
| Вывод | Назначение |
| VCC и GND | «плюс» и «минус» питания модуля, поддерживаются напряжения от 3,6 до 6 вольт; |
| TX и RX | передатчик и приёмник модуля; |
| MCU-INT (Status, State) | вывод статуса; |
| Clear (Reset) | сброс и перезапуск модуля, в данном случае осуществляется низким логическим уровнем. |
Последние два вывода могут быть не задействованы; часто можно встретить модули вообще без этих выводов.
Схема подключения bluetooth-модуля к Arduino
Подключим bluetooth модуль к Arduino по приведённой схеме. Обратите внимание, что передатчик (Tx) Ардуино подключается к приёмнику (Rx) модуля, и наоборот.
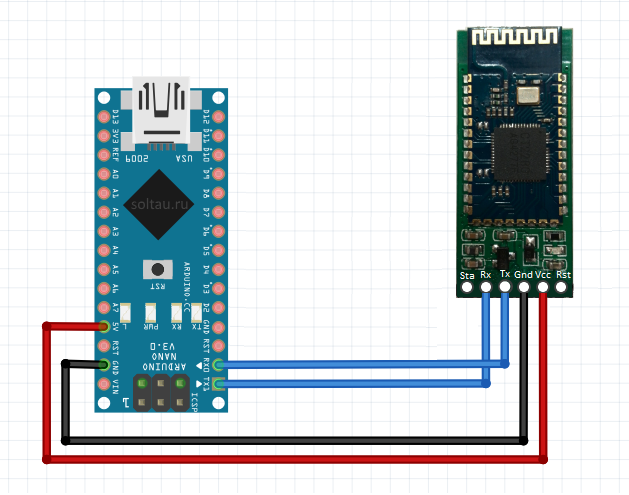
Схема подключения модуля bluetooth к Arduino
На выводе Status появляется высокий уровень, когда модуль сопряжён с другим bluetooth устройством, и низкий – когда не сопряжён. Можно считывать его значение, подключив к пину Arduino и назначив ему режим работы pinMode(pinStatus, INPUT) и таким образом узнавать состояние модуля. Но не на всех модулях индикатор статуса работает корректно, поэтому мы не будем его использовать в данном примере.
В результате должно получиться примерно как на фотографии.
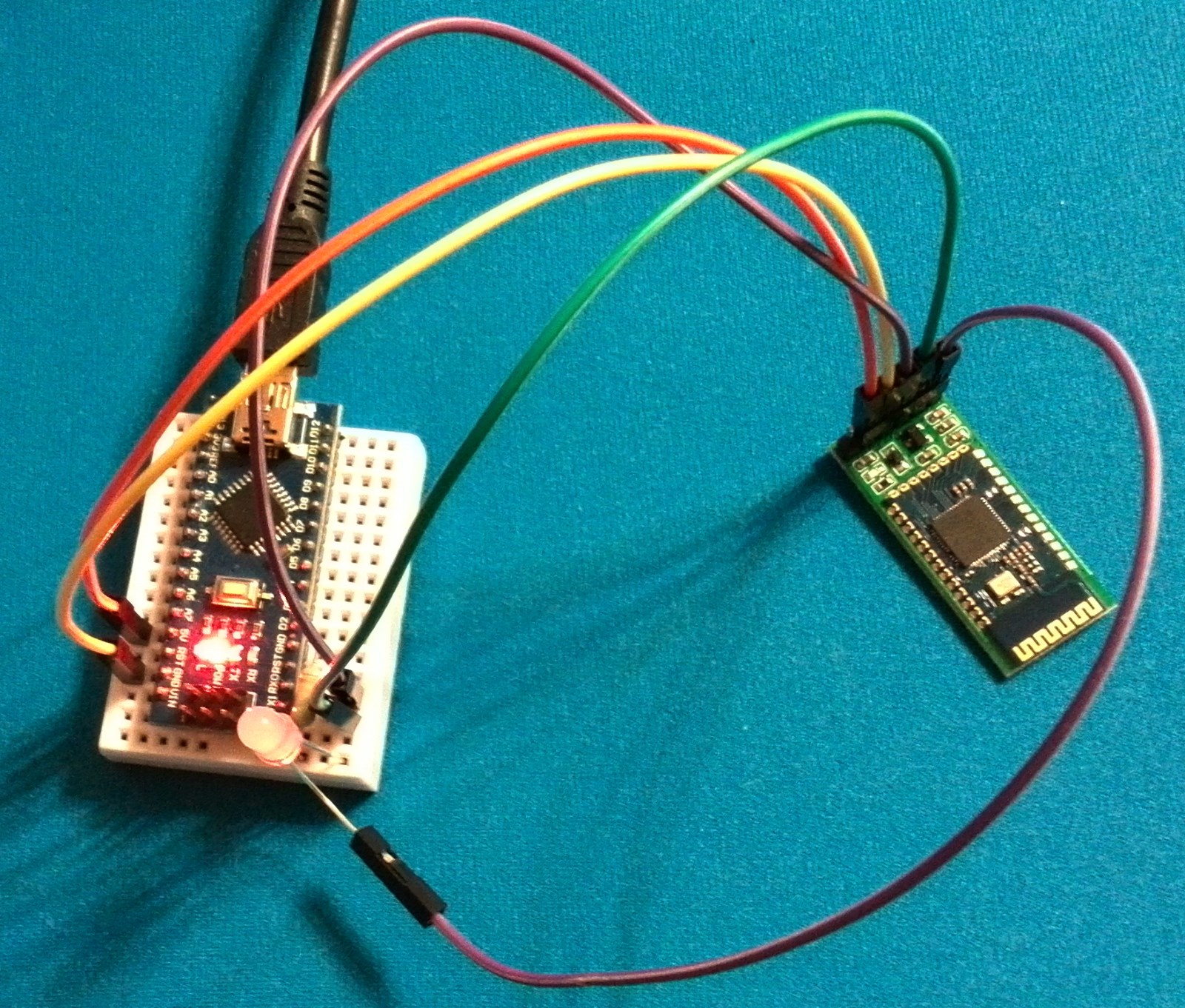
Bluetooth модуль подключён к Arduino
Скетч для Arduino для работы по bluetooth
Напишем такой скетч и загрузим в память Arduino:
| const int ledPin = 13; // вывод встроенного светодиода char incomingbyte; // переменная для данных Bluetooth void setup() { pinMode(ledPin, OUTPUT); Serial.begin(9600); } void loop() { if (Serial.available() 0) { // если порт доступен incomingbyte = Serial.read(); // считываем с порта данные switch(incomingbyte) { case '1': // если приходит "1" digitalWrite(ledPin, HIGH); // break; case '0': // если приходит "0" digitalWrite(ledPin, LOW); // break; } } } |
Включаем собранную схему с Arduino и подключённым к нему bluetooth-модулем. Правильно подключённый модуль сразу входит в режим ожидания подключения, о чём будет свидетельствовать ритмично мигающий светодиод статуса.
Сопряжение с bluetooth устройством
Теперь нужно добавить bluetooth-устройство в список доверенных устройств. Включаем Bluetooth на компьютере, идём в Параметры Устройства Bluetooth.
Если в области уведомлений при включении bluetooth на компьютере появилась иконка bluetooth, то можно кликнуть по ней правой кнопкой мыши и выбрать пункт Добавление устройства Bluetooth:
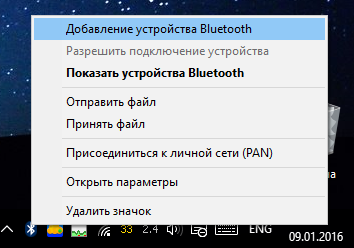
Добавление устройства Bluetooth
Убеждаемся, что наш bluetooth-модуль виден компьютеру. Выбираем его из списка и нажимаем кнопку Связать. В диалоговое окно вводим пароль по умолчанию 1234. При успешном добавлении устройство появится в списке с пометкой Сопряжено.

Сопряжение с bluetooth-устройством
Пароль по умолчанию для конкретного модуля может отличаться от "1234". Эту информацию должен предоставить изготовитель (продавец) модуля.
Если вы хотите подключиться к вашему модулю bluetooth со смартфона, то порядок действий аналогичный: включить bluetooth на смартфоне, обнаружить модуль, подключённый к Arduino, выполнить сопряжение с ним.
Подключаемся к bluetooth-модулюпо bluetooth с компьютера
Для подключения к bluetooth модулю можно использовать различные программы, которые могут подключаться к COM-порту. Например, такие как HyperTerminal, PuTTY, TeraTerm, Zelectro Controller и другие. Они все бесплатные и свободно распространяются в интернете.
Программа Zelectro Controller.
Zelectro Controller- приложение от команды Zelectro, облегчающее управление Arduino платой по каналам связи, эмулирующим COM порт.

Примером таких каналов связи могут служить: радиоканал (используя, например, APC220), bluetooth и другие.
Ссылка на скачивание приложения: Zelectro Controller
Исходный код можно найти здесь: github/ZController
Принцип работы довольно прост: приложение отправляет в выбранный COM порт символы при нажатии и отпускании клавиш. В Arduino скетче вы получаете и обрабатываете поступающие символы. Также реализовано решение, позволяющее корректно реагировать на потерю связи с платой. Сделано это посредством отправки контрольного символа с заданным интервалом.
Необходимо установить пакет .NET 4.0.
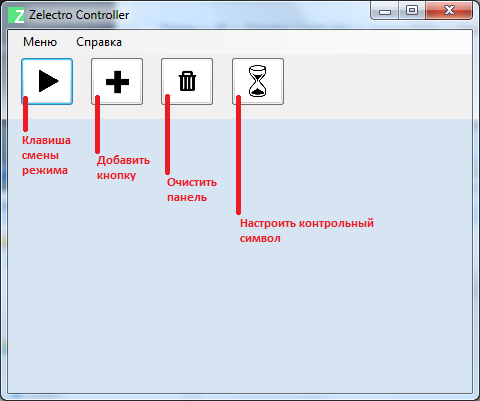
Перейдем непосредственно к программе. При первом запуске главное окно приложения выглядит так:
При нажатии на клавише "Добавить кнопку" отображается форма:
отображается форма:

После добавления кнопки на форму её можно передвигать в режиме редактирования.
В качестве примера добавим несколько кнопок на форму.
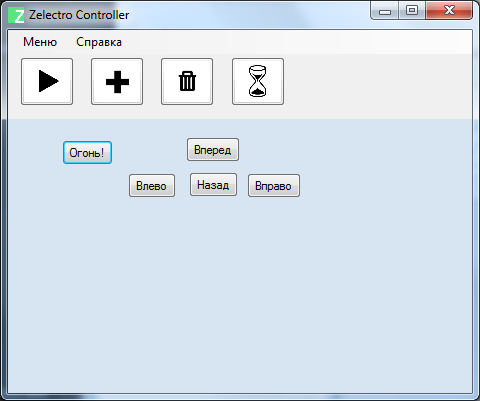
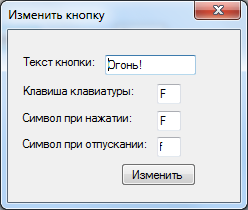
При двойном нажатии на одну из новых кнопок отображается форма для редактирования:
Удалить кнопку можно нажав правой клавишей мыши и выбрав "Удалить".
Для полной очистки формы нажмите кнопку "Очистить панель"![]() .
.
Чтобы перейти в рабочий режим, нажимаем кнопку смены режима  .
.
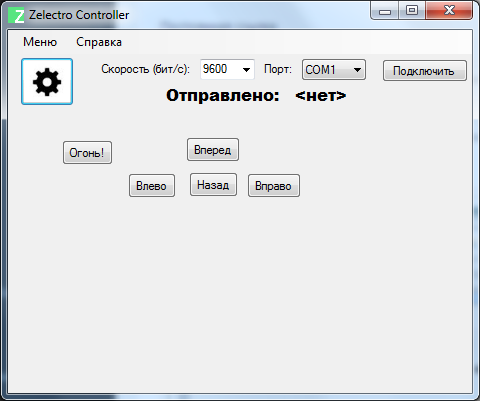
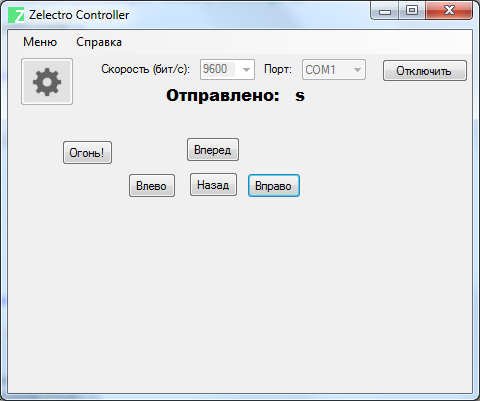
Устанавливаем необходимую скорость, выбираем порт, нажимаем "Подключить".
Строка "Отправлено" показывает нам последний отправленный символ.
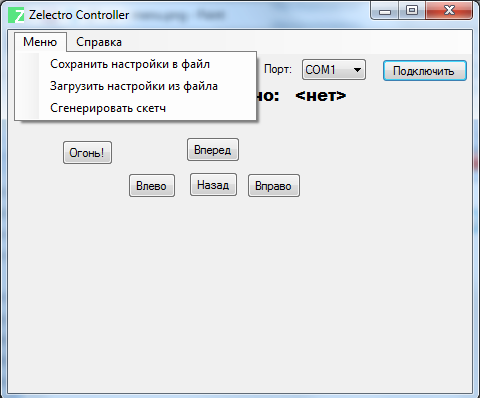
По умолчанию все сделанные вами изменения автоматически запомнятся при закрытии. Однако существует возможность сохранения и загрузки конфигураций из внешних файлов (для удобства работы с разными проектами).
Теперь рассмотрим работу с контрольным символом. Зачем он, собственно, нужен?
Представим следующую ситуацию:
При получении символа 'W': Arduino включает мотор, и робот едет вперед.
При получении символа 'S': Ardunio выключает мотор.
Происходит обрыв связи после отправки символа 'W' (или устройство вышло из радиуса действия) и последующие символы 'S' уже не получить. Как результат - робот едет вперед до победного, (например, куда-нибудь в воду). Решаем проблему.
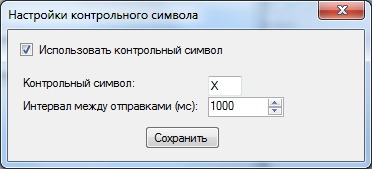
Заходим в режим настроек и нажимаем клавишу "контрольный символ"![]() .
.
В открывшемся диалоге указываем символ, устанавливаем интервал отправок (от 100 до 30 000 мс). Сохраняем.
При подключении видим следующую строку в статус баре:
![]()
Теперь Z-Controller отправляет в компорт выбранный контрольный символ с заданным интервалом. В скетче мы следим за его поступлением, и если его долго нет - обрабатываем это событие.
Последним шагом рассмотрим функцию генерации скетча. Найти её можно всё в том же "Меню". Кликнув на пункт "Сгенерировать скетч" получаем заготовку под наши настройки.
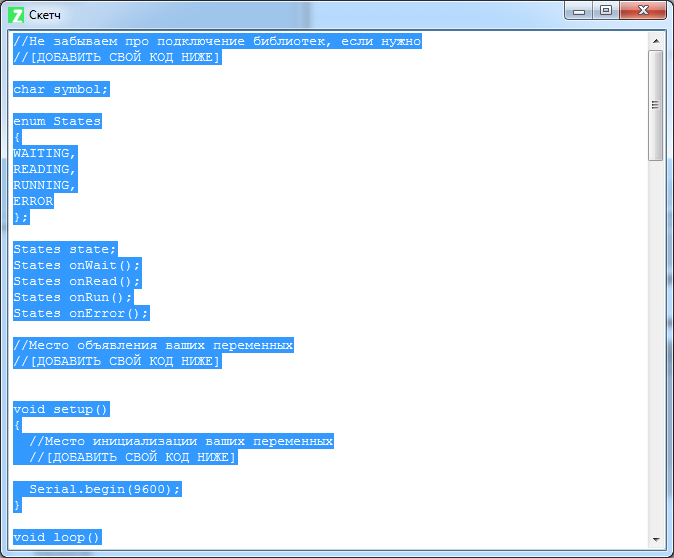
Пример сгенерированного и отредактированного кода для модели робота с двумя сервомеханизмами, мотором-насосом, двумя ходовыми двигателями:
| //Скетч для модели управляемый по bluetooth. #include Servo.h // Добавляем библиотеку для работы с сервомеханизмами Servo myservoH; // Горизонтальная серва углы от 25 до 145 (центровка 85) Servo myservoV; // Вертикальная серва углы от 0 до 35 const int H_SERVO_PIN = 9; // Горизонтальная серва подключена к пину 11 const int V_SERVO_PIN = 10; // Пин вертикального сервопривода const float H_L_ANGLE = 145; // Максимальные угол поворота башни налево const float H_R_ANGLE = 25; // Максимальные угол поворота башни направо const float H_DEF_ANGLE = 85; // Дефолтный угол (центровка) const float V_U_ANGLE = 55; // Максимальные угол поворота башни вверх const float V_D_ANGLE = 0; // Максимальные угол поворота башни вниз const float V_DEF_ANGLE = 25; // Дефолтный угол (центровка) //Размер шага V_STEP и H_STEP подбираем экспериментально для достижения нужной скорости поворота серв const float V_STEP = 0.007; // Шаг - значение отвечающее за скорость вращения по вертикали. const float H_STEP = 0.007; // Шаг - значение отвечающее за скорость вращения по горизонтали float curVAngle = V_DEF_ANGLE; // Переменная текущего угла вертик. сервы float curHAngle = H_DEF_ANGLE; // Переменная текущего угла гориз. сервы bool moveServoVUp = false; // Флаг движения верт. сервы вверх bool moveServoVDown = false; // Флаг движения верт. сервы вниз bool moveServoHLeft = false; // Флаг движения гориз. сервы влево bool moveServoHRight = false; // Флаг движения гориз. сервы вправо const int TIMEOUT_TIME_MS = 150; unsigned long lastPilotSymbolTime; char symbol; int val; int IN1 = 5; // выводы для мотор - шилда подключены к следующим пинам Arduino int IN2 = 6; int IN3 = 7; int IN4 = 8; // Для удобства подключения, затвор мосфета подключен к аналоговому входу A0, однако, // входы A0-A6 можно использовать как цифровые, в коде будут нумероваться как 14-19 int SHOT = 14; // пин А0 на Arduino int LED = 4; // Используем встроенный светодиод для индикации работы enum States { WAITING, READING, RUNNING, ERROR, TIMEOUT }; States state; States onWait(); States onRead(); States onRun(); States onError(); States onTimeout(); void performServo(); void setup() { Serial.begin(9600); // скорость связи с компьютером lastPilotSymbolTime = 0; pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT); pinMode(SHOT, OUTPUT); myservoH.attach(H_SERVO_PIN); // устанавливаем пин как вывод управления сервой myservoV.attach(V_SERVO_PIN); myservoH.write(curHAngle); myservoV.write(curVAngle); pinMode(LED, OUTPUT); // используем 4 пин как индикатор включённой ардуины digitalWrite(LED, HIGH); } void loop() { switch (state) { case WAITING: state = onWait(); break; case READING: state = onRead(); break; case RUNNING: state = onRun(); break; case TIMEOUT: state = onTimeout(); break; default: state = onError(); } performServo(); } States onWait() { if (Serial.available() 0) { return READING; } if (lastPilotSymbolTime && (millis() - lastPilotSymbolTime TIMEOUT_TIME_MS)) { return TIMEOUT; } return WAITING; } States onRead() { symbol = Serial.read(); return RUNNING; } States onRun() { switch (symbol) { case 'W': //начало действий при полученном символе 'W' (вперед) digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW); break; case 'w': //начало действий при полученном символе 'w' (стоп вперед) digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; case 'S': //начало действий при полученном символе 'S' (назад) digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); break; case 's': //начало действий при полученном символе 's' (назад стоп) digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; case 'A': //начало действий при полученном символе 'A' (влево) digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); digitalWrite(IN3, HIGH); digitalWrite(IN4, LOW); break; case 'a': //начало действий при полученном символе 'a' (влево стоп) digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; case 'D': //начало действий при полученном символе 'D' (вправо) digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, HIGH); break; case 'd': //начало действий при полученном символе 'd' (вправо стоп) digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); break; case 'Z': //начало действий при полученном символе 'Z' (вкл пушка) digitalWrite(SHOT, HIGH); break; case 'z': //начало действий при полученном символе 'z' (выкл пушка) digitalWrite(SHOT, LOW); break; // Сервы case 'I': // servoV вверх moveServoVUp = true; break; case 'K': // servoV вниз moveServoVDown = true; break; case 'i': // servo V стоп moveServoVUp = false; moveServoVDown = false; break; case 'L': // servo H движется к 25 moveServoHRight = true; break; case 'J': // servo H движется к 145 moveServoHLeft = true; break; case 'l': // servo H стоп moveServoHLeft = false; moveServoHRight = false; break; case 'U': curVAngle = V_DEF_ANGLE; curHAngle = H_DEF_ANGLE; myservoV.write(curVAngle); myservoH.write(curHAngle); break; case 'T': //начало действий при полученном символе 'T' (остановка) digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); digitalWrite(SHOT, LOW); break; case 'P': //получили контрольный символ, не изменяйте этот код lastPilotSymbolTime = millis(); break; default: return ERROR; } return WAITING; } States onError() { //Получены неоговоренные символы. Очищаем ввод и продолжаем. //Здесь можно добавить какие-то действия для этой ситуации. while (Serial.available()) { Serial.read(); } return WAITING; } States onTimeout() { //Действия при таймауте. Вероятно, связь утеряна, но при получении контрольного символа она будет восстановлена. //Здесь, например, уместно выключить двигатели digitalWrite(IN1, LOW); // На пары выводов IN поданы сигналы одинакового уровня, моторы не работают digitalWrite(IN2, LOW); digitalWrite(IN3, LOW); digitalWrite(IN4, LOW); digitalWrite(SHOT, LOW); if (Serial.available()) { return READING; } return TIMEOUT; } //Функция управления сервоприводами (вызывается в теле loop на каждой итерации) //Выполняет изменения положения серв на подобранный шаг согласно установленным флагам движения //Флаги устанавливаются согласно поступившим символам управления сервами void performServo() { // Установлен флаг движения вверх и текущий угол не максимальный if (moveServoVUp && curVAngle + V_STEP { // К текущему верт. углу прибавляем шаг curVAngle += V_STEP; } // Установлен флаг движения вниз и текущий угол не минимален else if (moveServoVDown && curVAngle - V_STEP = V_D_ANGLE) { // От текущего верт. угла отнимаем шаг curVAngle -= V_STEP; } // Установлен флаг движения влево и текущий угол не максимален if (moveServoHLeft && curHAngle + H_STEP { // К текущему гор. углу прибавляем гор. шаг curHAngle += H_STEP; } // Установлен флаг движения вправо и текущий угол не минимален else if (moveServoHRight && curHAngle - H_STEP = H_R_ANGLE) { // От текущего угла отнимаем гор. шаг curHAngle -= H_STEP; } // Если было движние по вертикали if (moveServoVUp || moveServoVDown) { myservoV.write(curVAngle); } // Если было движение по горизонтали if (moveServoHLeft || moveServoHRight) { myservoH.write(curHAngle); } } |
Главное окно приложения Zelectro Controller
В таблице представлена расшифровка кнопок управления на компьютерной клавиатуре.
| Кнопка (символ) | Действие робота | Кнопка (символ) | Действие робота |
| W | Вперед | I | Башня вверх |
| A | Влево | J | Башня влево |
| S | Назад | K | Башня вниз |
| D | Вправо | L | Башня вправо |
| Z | Включение насоса | U | Центровка башни |
Если всё правильно настроить и иметь в распоряжении подходящие аппараты и устройства, то можно совершать управление через Bluetooth телефоном на платформе Android в приложении Blueinput Teksoft.
Заключение
Данная методическая разработка была апробирована в робототехническом объединении учащимися 3 года обучения.
18







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

