
Россия, Владимир


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 12.04.2020 22:52

Анцыпа Валентина Алексеевна
методист
Местоположение
Специализация
Кибернетические системы
Категория:
Информатика
30.05.2017 14:10

Просмотр содержимого документа
«Кибернетические системы»
Кибернетические системы
ПОНЯТЬ
Общие закономерности и проблемы управления, в том числе автоматического управления, изучаются в кибернетике. Ноберт Винер – автор первых работ по кибернетике – определил её как науку об управлении, связи и переработке информации в живом организме и машине.
Любая наука предназначена для того, чтобы описать, объяснить и предсказать устройство и поведение существующих систем и на основе полученных знаний создать новые системы, которые помогали бы человеку решать стоящие перед ним задачи.
Многие из окружающих человека систем (да и сам человек) являются кибернетическими, то есть управляемыми, которые изменяют своё состояние под влиянием управляющих воздействий. Именно такие системы и изучаются в кибернетике, которая во многом является предшественницей информатики.
Растения, животные, экосистемы, человек, общество – естественные кибернетические системы.
Компьютер, системы автоматического (без участия человека) управления, системы, допускающие автоматизированное управление (с участием человека) управление, промышленные и исследовательские роботы, станки с числовым программным управлением, сложная бытовая техника – всё это является искусственными кибернетическими системами, созданными человеком.
Создаются такие системы для того, чтобы оказывать помощь человеку в условиях, когда нужно действовать во вредных для здоровья человека условиях, когда нужно выполнять точные, монотонные действия, утомительные для человека, когда решения нужно принимать в условиях острого дефицита времени и т.п.
Пример
Станции радиолокационного слежения гораздо точнее, чем человек, могут контролировать воздушное пространство на границах страны.
Станки с числовым программным управлением могут без вмешательства человека выпускать сотни тысяч деталей в смену с требуемой точностью.
Компьютер может значительно быстрее и точнее, чем человек, обработать большие потоки данных, просчитать возможные варианты и определить, какие из них позволяют достичь цели с наименьшим риском и минимальными затратами ресурсов.
Создание кибернетических систем требует предварительного изучения естественных систем и разработки моделей их поведения, функционирования, развития. В истории известны многочисленные примеры создания устройств, имитирующих поведение животных и человека.
Немного истории
Папирусы древности донесли до нас описания многих механизмов, подражающих движениям человека и животных. Легенды гласят, что тарентский философ и математик Архит в IV веке до н. э. смастерил деревянного голубя, который махал крыльями и мог даже взлетать; египетский фараон Птоломей Филадельфийский в III веке до н. э. заставил изготовить куклу, подражающую движениям человека.

Рис. Схема автомата «Сова и поющие соловьи», созданного Героном Александрийским (II в. до н.э.)
Известно, что около 800 лет назад монах из Кёльна Альберт фон Больштедт изготовил механического привратника. Он делал его больше тридцати лет. Как только открывалась дверь, «привратник» приветствовал входящего поднятой рукой и, одетый в ливрею, очень походил на живого человека.
Примерно в то же время другой монах и ученый – Роджер Бэкон изготовил «говорящую» бронзовую голову и летающую железную птицу.
Леонардо да Винчи придумал и изготовил множество удивительных для своего времени машин. В частности сложную механическую модель льва, который мог шагать, останавливаться в нужном месте и выполнять ряд других действий.
В истории создания механических автоматов известен французский механик Жак Вакансон (XVIII в.). Он построил механическую утку в натуральную величину, которая повторяла до мельчайших подробностей живой образец: щелкала клювом, плавала, брызгала в воде, двигала крыльями, чистила и расправляла перья, крякала, вытягивала голову вверх, выклевывала из протянутой ладони зерна и глотала их, повторяя глотательные движения живой утки.

Рис. Схема механической утки Вакансона
Имитация поведения животных и человека позволяет создавать и устройства, которых в природе до этого не было. Гюйгенс, создав в 17 веке маятниковые часы, ввел в технику новый вид связи между управляющей системой и объектом управления. Правда, только через два с половиной столетия Е. Румер дал ей имя – «обратная связь». Именно обратная связь во многом стала основой автоматических систем.
Можно сказать, что эти мастера стояли у истоков таких научных дисциплин, как автоматика и автоматическое управление, кибернетика, программирование, а их изделия стали предшественниками современных роботов, то есть машин, способных выполнять человеческую работу или вести себя подобно человеку.
Робот – система, способная к целесообразному поведению в условиях изменяющейся внешней обстановки. Симбиоз искусственного интеллекта и механики. Его ядром является компьютер либо группа компьютеров, управляющая внешними устройствами – развитыми органами, предназначенными для пространственного и углового перемещения деталей, инструментов либо собственного перемещения. Для выполнения своих функций робот обрабатывает информацию, даваемую его датчиками (искусственные органы зрения, слуха, сенсорные устройства).
Термин «робот» был впервые введён К. Чапеком в пьесе «R. U. R.» (1920 г.), главные персонажи которой – человекоподобные машины были названы им роботами (от чешского rabota – работа).
С развитием робототехники появились различные разновидности роботов: с жёсткой программой действий; управляемые человеком-оператором; снабженные искусственным интеллектом, действующие целенаправленно («разумно») без вмешательства человека.

Рис. Промышленный робот-манипулятор.

Рис. Схема производственного участка, обслуживаемого роботом-манипулятором.
Первые роботы-андроиды, имитировавшие движения и внешний облик человека, использовались преимущественно в развлекательных целях. С 30-х годов ХХ века в связи с автоматизацией производства роботы-автоматы стали применять в промышленности, особенно в цехах с вредными условиями труда Промышленные роботы-автоматы имеют преимущество перед человеком в скорости и точности выполнения ручных однообразных операций. Наиболее распространены роботы-манипуляторы с дистанционным управлением и «механической рукой», закрепленной на подвижном или неподвижном основании. Оператор управляет движением «руки», одновременно наблюдая её непосредственно либо на телевизионном экране; в последнем случае робот снабжается «телевизионным глазом» — передающей телевизионной камерой. Часто роботы оснащают обучающейся автоматической системой управления. Если такому роботу «показывают» последовательность операций, то система управления фиксирует её в виде программы управления и затем точно воспроизводит при работе. Роботы-манипуляторы используют для работы в условиях относительной недоступности либо в опасных, вредных для человека условиях, например в атомной промышленности, где они применяются с 50-х годов ХХ века. В 60-х годах появились подводные роботы-манипуляторы разнообразных конструкций и назначения: от глубоководных управляемых аппаратов с «механическими руками» (в частности, для захвата образцов породы со дна моря и т. д.) и ползающих по морскому дну платформ с исследовательской аппаратурой до подводных бульдозеров и буровых установок.
В конце 60-х годов в робототехнике возникло новое научное направление, связанное с созданием интеллектуальных роботов. Они имеют датчики «чувств» (сенсорную систему), воспринимающие информацию об окружающей обстановке, устройство обработки полученной информации (искусственный интеллект) — специализированную ЭВМ с набором программ — и исполнительные механизмы (моторную систему). Действия интеллектуального робота обладают некоторыми признаками человеческого поведения: датчики собирают информацию о предметах окружающего мира, их свойствах и взаимодействии; на основе этих данных искусственный интеллект формирует модель внешнего окружения и принимает решение о последовательности действий робота, которые реализуются исполнительными механизмами.
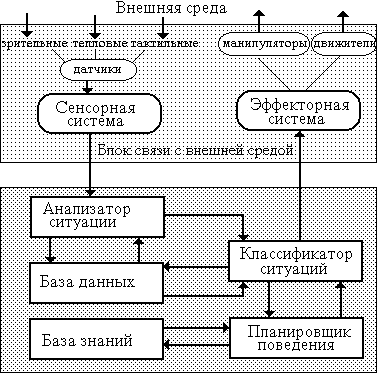
Рис. Схема робота, способного к автономной работе в изменяющейся внешней среде
В настоящее время во многих странах вновь возрос интерес к андроидам – прототипам гуманоидных роботов с зачатками искусственного интеллекта.
Пример
А ндроид Sony SDR-4X. Рост – 58 см. Вес – 6,5 кг. Максимальная скорость – 20 м/мин.
ндроид Sony SDR-4X. Рост – 58 см. Вес – 6,5 кг. Максимальная скорость – 20 м/мин.
Система адаптивного контроля в реальном времени обеспечивает оперативное управление всеми 28 «суставами» робота на основании сигналов, поступающих от многочисленных датчиковЭто обеспечивает гибкую пластику, позволяющую роботу передвигаться, танцевать и не терять равновесия даже на неровной поверхности. Функцию глаз выполняют две видеокамеры, благодаря чему удалось реализовать стереоскопическое «зрение» (как у человека) — робот может не только воспринимать очертания объекта, но и способен оценить расстояние до него. Получение «трехмерного» изображения нужно андроидам для того, чтобы успешно обходить препятствия, заранее просчитывая оптимальный маршрут, и узнавать людей по чертам лица. Андроид Sony способен выделять из общего фона лица людей, а в его памяти может храниться до десяти образов различных лиц. Имеется слуховая система, состоящая из семи микрофонов, а также генератор речи. Благодаря этому андроид SDR-4X способен ориентироваться по источнику звука и распознавать голоса разных людей. Голосовой генератор робота позволяет ему петь и произносить слова (лексикон включает 60 тыс. слов). «Мозг» робота SDR-4X базируется на паре 64-разрядных RISC-процессоров. Плюс два модуля DRAM-памяти по 64 Мбайт. Управляющая работой SDR-4X операционная система реального времени Sony Aperios записывается на 16-мегабайтную флэш-карту формата Memory Stick.
П ример
ример
Андроид. Honda ASIMO выглядит именно так, как принято описывать андроидов в научно-фантастических романах. Его рост — около 120 см, вес — 43 кг. Управляющий работой робота высокопроизводительный четырехпроцессорный компьютер размещается внутри массивного углепластикового «ранца»; там же находятся аккумуляторы, заряда которых хватает на 25 минут активной работы андроида. При этом робот обладает недюжинной силой: в каждой руке он может легко нести груз массой до 9 кг. На ровной поверхности развивает скорость 2 км/ч. Андроид Honda ASIMO уверенно ходит по ступенькам. Он не только распознает до 50 голосовых команд и 30 жестов, но и адекватно реагирует на них. Основная задача робота — реагировать на просьбы людей и оказывать им помощь, например, переносить грузы.
Искусственный интеллект – такой результат работы компьютера, который сочли бы разумным, если бы он был произведён человеком.
Современные андроиды способны в соответствии с заложенными в них настраиваемыми и «обучающимися» (адаптивными) программами умеют ходить вперед-назад на двух ногах, танцевать, следить за работой бытовых приборов, разговаривать - задавать и отвечать на вопросы, распознавать голоса, ориентироваться в пространстве, осязать, различать запахи и т.п. Конечно же, это только первые попытки создания искусственного разума, то есть технической системы, способной обнаруживать свойства, аналогичные разумному мышлению и поведению человека. В отличие от систем искусственного интеллекта, такие системы не только оперируют готовыми знаниями, но и способны создавать новые знания.
И в основе всех автоматических устройств – кибернетических систем, в том числе и компьютера и систем искусственного интеллекта - лежат моделирование, передача и обработка информации и управление.
ЗНАТЬ
Кибернетика (cybernetics) – наука об общих закономерностях управления общественными, экономическими, биологическими, природными и техническими системами.
Основными понятиями кибернетики являются понятия управления, обратной связи, кибернетической системы, модели.
Кибернетическая система – система, в которой осуществляется целенаправленное управление и которая может изменять своё состояние или поведение в результате управляющих воздействий.
Существуют естественные и искусственные кибернетические системы.
В основе функционирования сложной кибернетической системы лежат информационные процессы (получение, передача, обработка, кодирование, хранение информации) и управление.
Исследование существующих кибернетических систем и создание новых невозможно без информационного моделирования.
В современных искусственных кибернетических системах широко используется компьютеры и системы искусственного интеллекта.
Искусственный интеллект – способность технической системы обнаруживать свойства, соотносимые с разумным поведением человека.
Искусственный разум – гипотетическая техническая система, способная обнаруживать свойства, идентичные разумному мышлению и поведению человека, способные не только использовать заложенные в неё знания, но и создавать новые знания.
Робот – техническое устройство, которое частично или полностью выполняет функции человека или животного при взаимодействии с окружающим миром.
Промышленный робот - электронно-механическое устройство,
способное к целесообразному поведению в условиях изменяющейся внешней обстановки и выполняющее рабочие операции со сложными пространственными перемещениями.
Главную часть промышленного робота составляет вычислительная система, управляющая перемещением самого робота или сторонних предметов с помощью устройств-манипуляторов. Для выполнения своих функций робот обрабатывает информацию, поступающую от его датчиков.
Кибернетика является научной основой комплексной автоматизации производства, разработки и создания систем управления в промышленности, на транспорте, ирригационных и газораспределительных системах, на атомных электростанциях, космических кораблях и т.п.
Проблема рационального распределения функций между человеком и автоматически действующими устройствами в сложных системах управления, в которых человек принимает непосредственное участие как обязательный элемент системы, является одной из главных при создании кибернетических систем.
УМЕТЬ
Перечислите основные виды кибернетических систем, о которых идёт речь в параграфе. Назовите известные Вам кибернетические системы, которые не вошли в этот перечень.
Дайте словесное описание схемы робота, способного к автономной работе в изменяющейся внешней среде, приведенной в тексте параграфа.
Назовите основные черты сходства и отличия человеческого разума и искусственного разума. За основу возьмите мысль Н.Винера, высказанную им в книге «Творец и робот»: «Главное преимущество мозга перед машиной – способность оперировать с нечётко очерченными понятиями. Мозг свободно воспринимает стихи, романы, картины, музыку, содержание которых любая ЭВМ должна была бы отбросить как нечто аморфное».
В середине ХХ века, когда впервые возникли научные споры о том, можно ли создать искусственный разум. Выдающийся математик Алан Тьюринт предложил критерий, по которому можно определить, является ли поведение технической системы «разумным». Тест Тьюринга – процедура, состоящая в том, что человек задаёт вопросы неизвестному объекту, также использующему язык общения, и пытается по ответам отгадать, кто там – человек или машина.
Попробуйте опровергнуть справедливость данного теста.







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

