
Россия, Стерлибашево


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 20.08.2025 08:35
Загидуллин Наиль Рашитович
учитель
55 лет
Местоположение
Специализация
Элективный курс "Конструирование роботов в школе"
Категория:
Информатика
02.11.2021 08:24

Просмотр содержимого документа
«Элективный курс "Конструирование роботов в школе"»
| Наиль Загидуллин
|
| МБОУ СОШ № 2 с. Стерлибашево |
| Конструирование роботов-манипуляторов |
| Робототехника |
Оглавление
Раздел 1 Сборка модели металлического манипулятора с плоско-параллельной кинематикой 3
Урок 1 Крепление рычага на Х-образный фланец 3
Урок 2 Сборка Сервопривода 6
Урок 3 Сборка Стола и ноги 9
Урок 4 Сборка привода ноги 10
Урок 5 Сборка опоры 11
Урок 6 Сборка опоры 13
Урок 6 Сборка головки 14
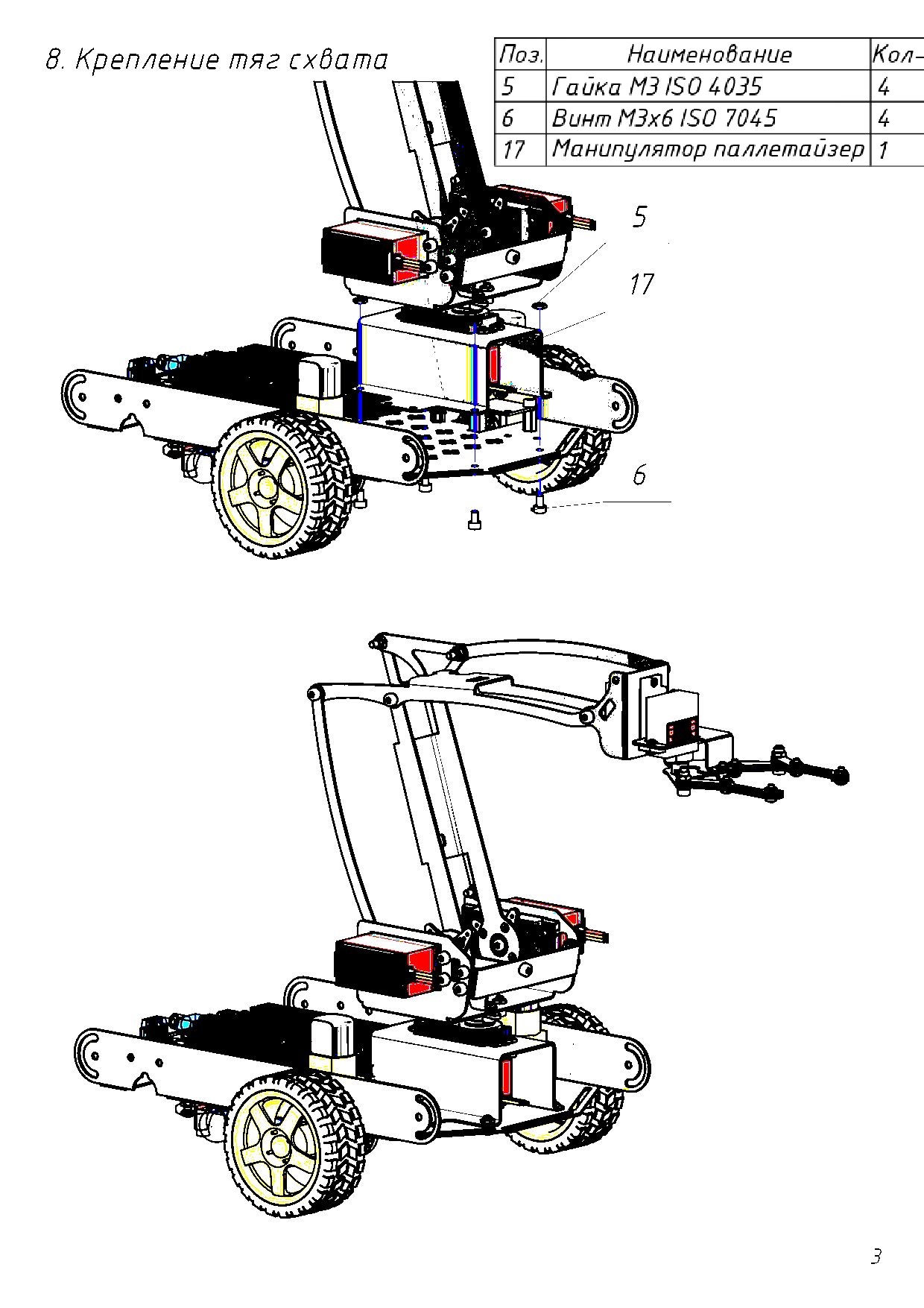
Урок 7 Сборка схвата 15
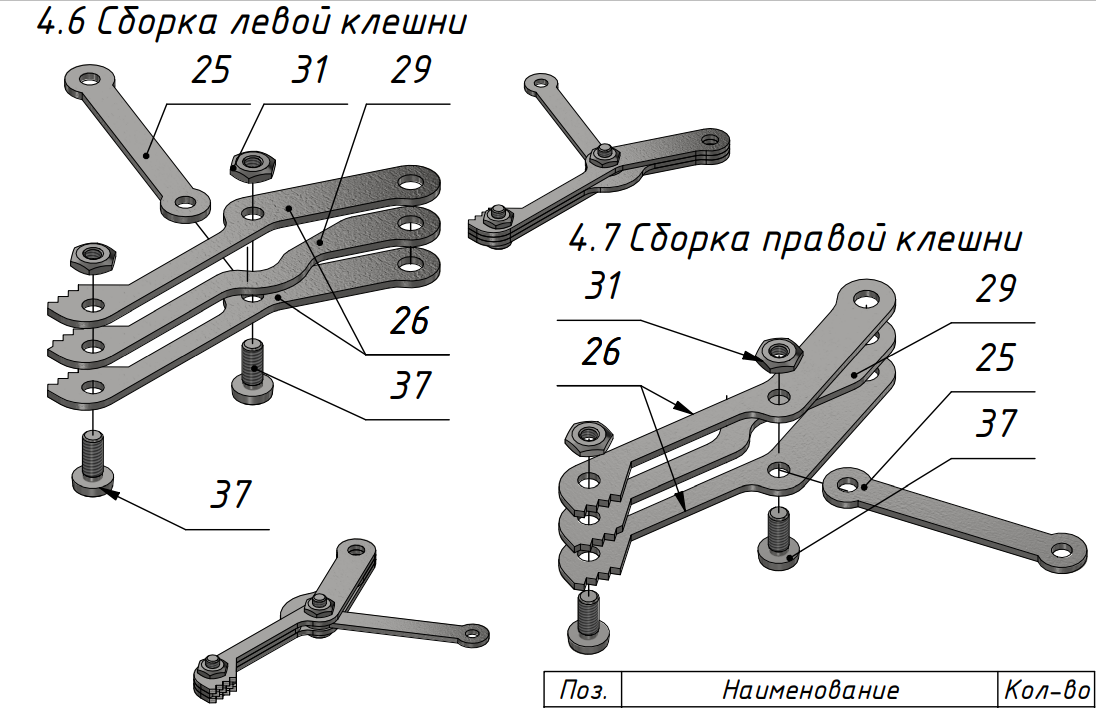
Урок 8 Сборка клешни 17
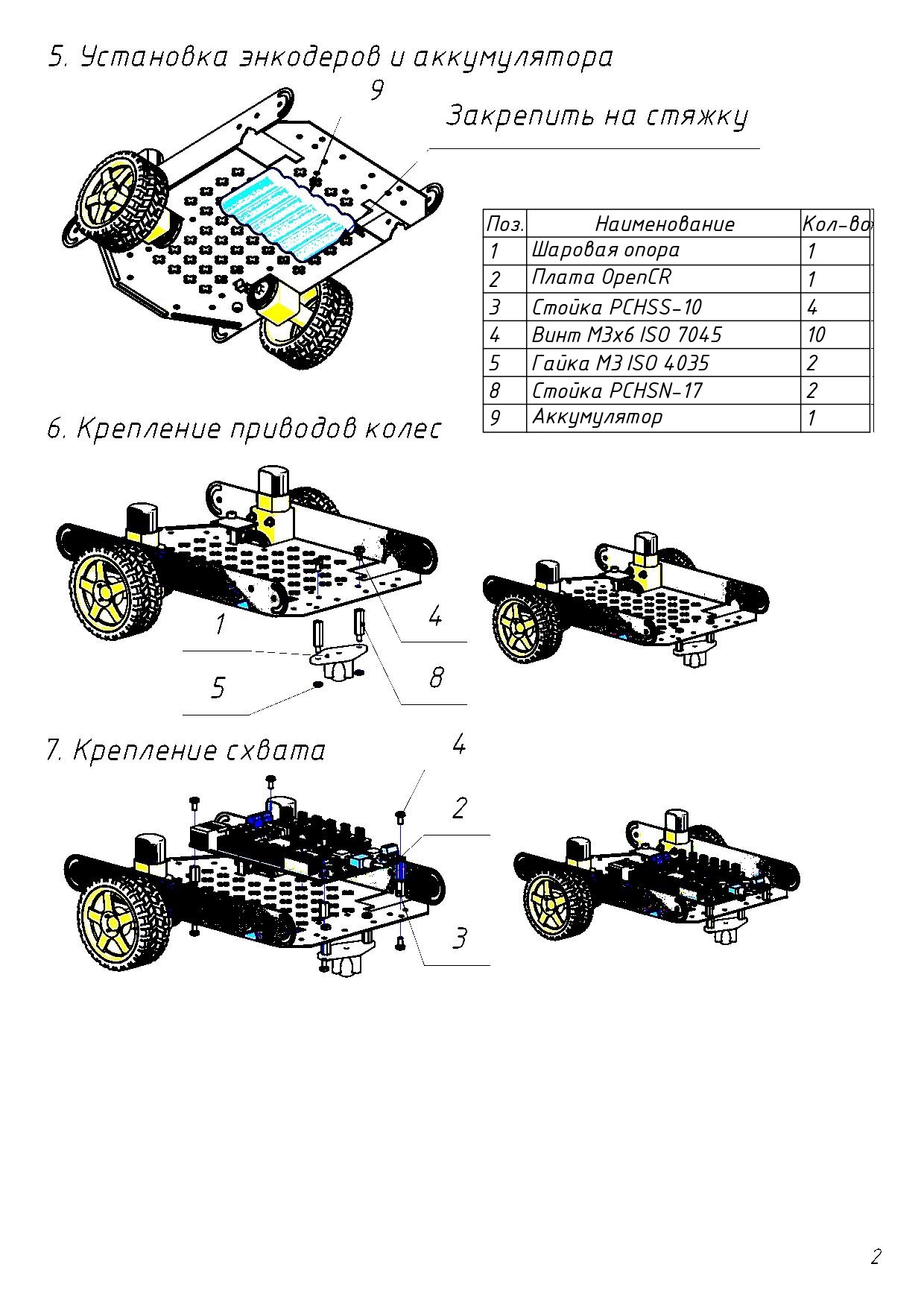
Урок 9 Сборка платформы. Установка энкодеров и приводов. 19
Урок 10 Сборка платформы. Установка аккумулятора и платы 20
Урок 11 Подключение манипулятора к микроконтроллеру 22
Урок 12 Управление роботом 23
Раздел 2 Сборка модели с угловой кинематикой 25
Источники: 26
Приложения 27
Проект Робот-погрузчик 27
Проект Дистанционный выключатель 28
плоско-параллельной кинематикой Урок 1 Крепление рычага на Х-образный фланец
Теория:
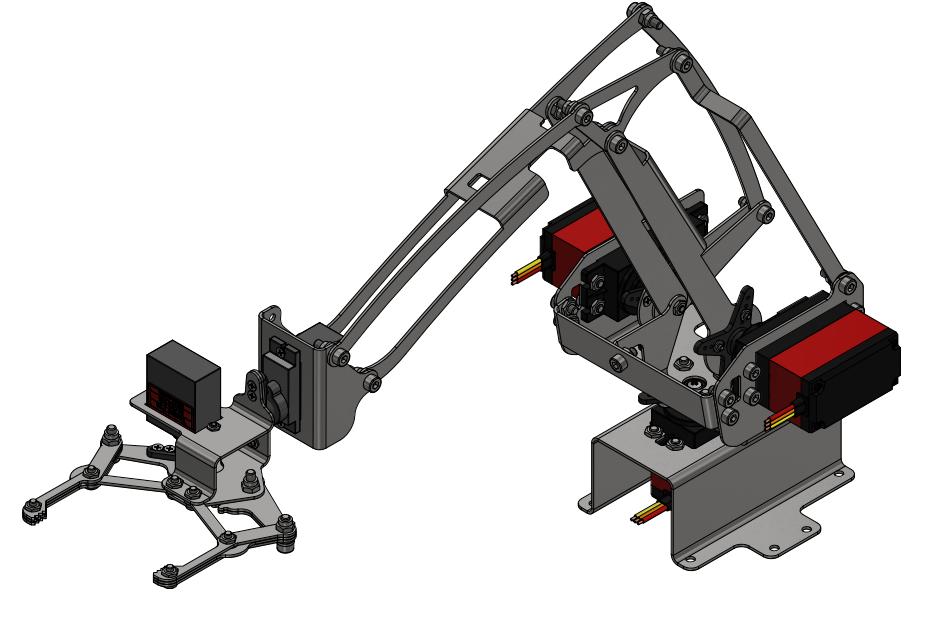
Роботом-манипулятором называют тип промышленных роботов. Обладающих функциями движения, аналогичными функциям человеческой руки. Манипулятор состоит из отдельных частей, которые приводятся в движение двигателями, последние управляются программно микроконтроллером.
Цель: Научиться работать с инструментами для сборки конструкторов и расширение научно-технических знаний
Задача урока: Выполнить сборку фрагмента будущей конструкции.
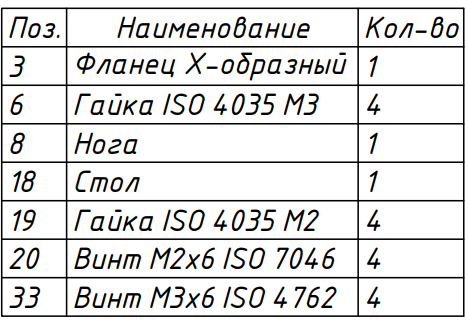
Оборудование: отвертка крестовая (ph 2-3 мм), сверло (2 мм), аккумуляторная дрель (шуруповёрт), винт Мх2(4 шт), гайка Мх2(4 шт),
Х-образный фланец(1 шт), Рычаг(1 шт)
| Фланец — плоская деталь квадратной, круглой или иной формы с отверстиями для болтов или шпилек |
|
| Рыча́г — простой механизм, представляющий собой твёрдое тело, вращающееся вокруг точки опоры. |
|
| Га́йка — крепёжное изделие с резьбовым отверстием, образующее разборное соединение с помощью винта, болта или шпильки. |
|
| Винт — крепёжное изделие с резьбой для соединения деталей |
|
| Сверло́ — режущий инструмент, предназначенный для сверления отверстий в различных материалах |
|
| Дрель — ручной, пневматический или электрический инструмент, предназначенный для придачи вращательного движения сверлу или другому режущему инструменту |
|






Посмотреть видео: https://youtu.be/EFyCE_VNWUk - шуруповёрт
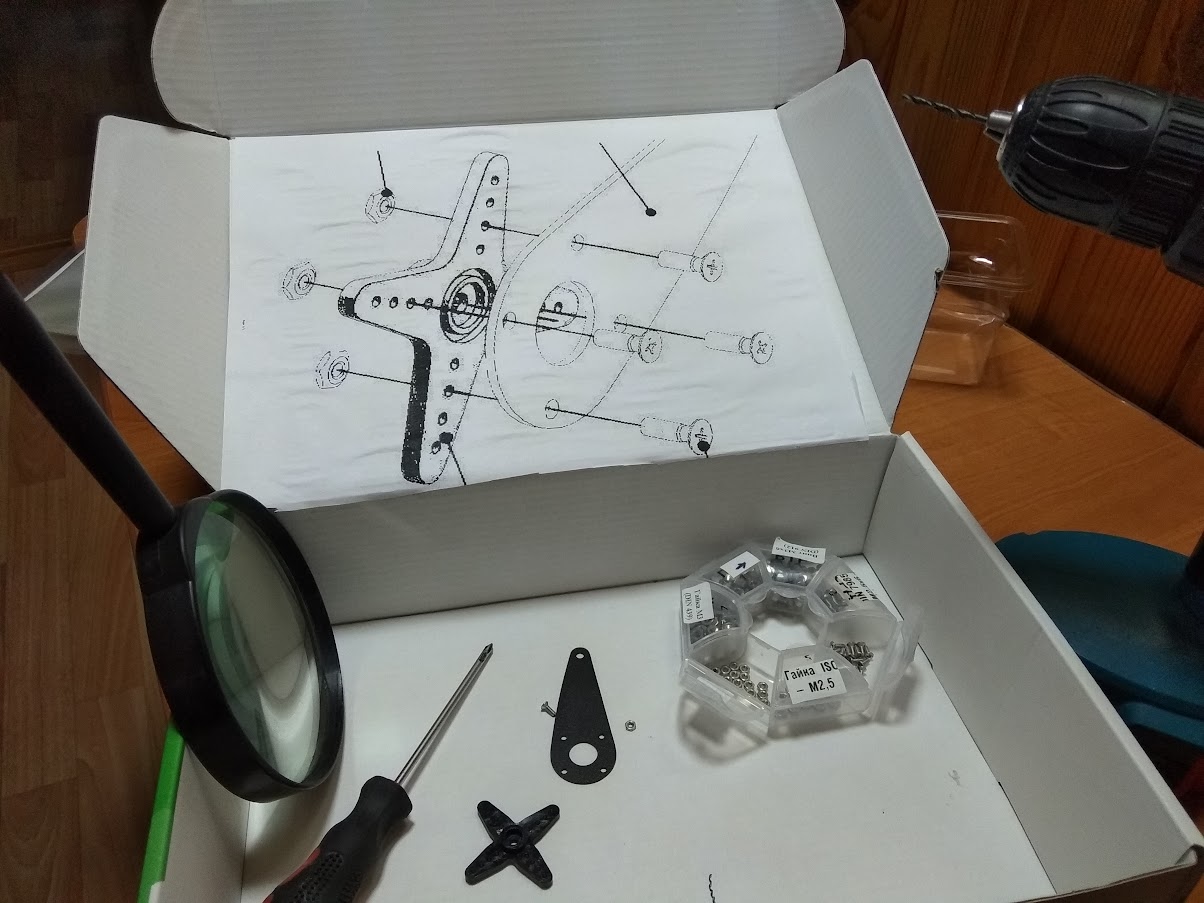
Сборка фрагмента конструкции:
Схема:
Техник безопасности
Аккуратно обращайтесь со сверлом, не делайте резких движений
 Чтобы не испортить элемент конструкции при расширении отверстия, сначала потренируйтесь на других материалах
Чтобы не испортить элемент конструкции при расширении отверстия, сначала потренируйтесь на других материалах
Порядок работы:
Насадите сверло на дрель
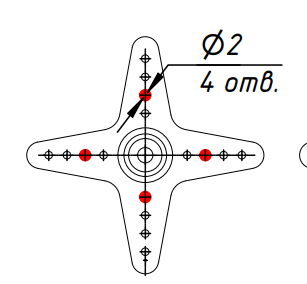
Расширьте 4 отверстия на фланце
(второе отверстие от центра)
Закрепите с помощью винтов и гаек рычаг на фланец
Отверткой окончательно закрепите винты
Совет:
Чтобы не терять мелкие детали и не засорять стружками рабочее место, выполняйте работу внутри коробки с невысокими бортами или кювета.
Если у вас плохое зрение, используйте увеличительное стекло.
Чтобы гайки не откручивались, капните на них лак для ногтей.
Теория:
С
ервопривод — это мотор, положением вала которого мы можем управлять. От обычного мотора он отличается тем, что ему можно точно в градусах задать положение, в которое встанет вал. Сервоприводы используются для моделирования различных механических движений роботов.
Энкодер – датчик обратной связи, преобразующий угол поворота в управляющий сигнал, контролирующий вращение выходного вала (на последнем закреплен инструмент или какой-то другой орган выполнения действия).
Кабель имеет три шины
Желтый – шина сигнала энкодера
Красный – шина питания +5 (VL)
Коричневый – шина земля (GND)
Поворот сервопривода данного типа возможен только максимум на 170 -174 градуса
Грузоподъемность 20, 3 кг
Цель: Научиться работать с сервоприводом, расширение знаний о сервоприводах, научиться пользоваться шестигранным шлицем.
Задача урока: Выполнить сборку сервопривода на стол и проверить работу с помощью микроконтроллера
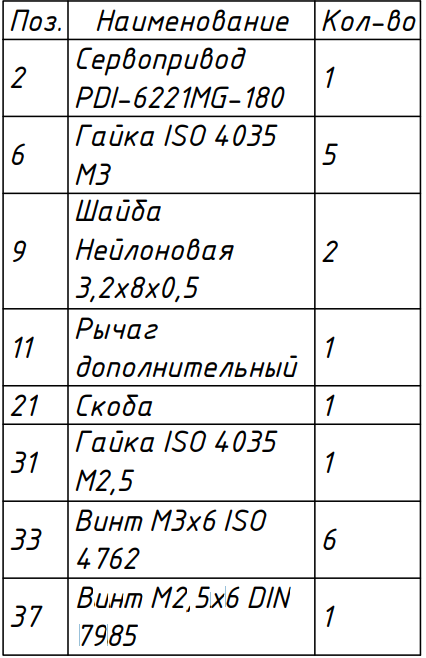
Оборудование: Сервопривод PDI-6221MG, блок питания, микроконтроллер, ноутбук,
винт М3х6(4 шт.), гайка М3(4 шт.), Стол, шестигранный шлиц(2,5)
Техник безопасности
При работе с электрическим током будьте осторожны. К розеткам подается опасное напряжение 220 В. Не касайтесь влажными руками блок питание. Ток идущий от блока питания не опасен для жизни.
Ход урока
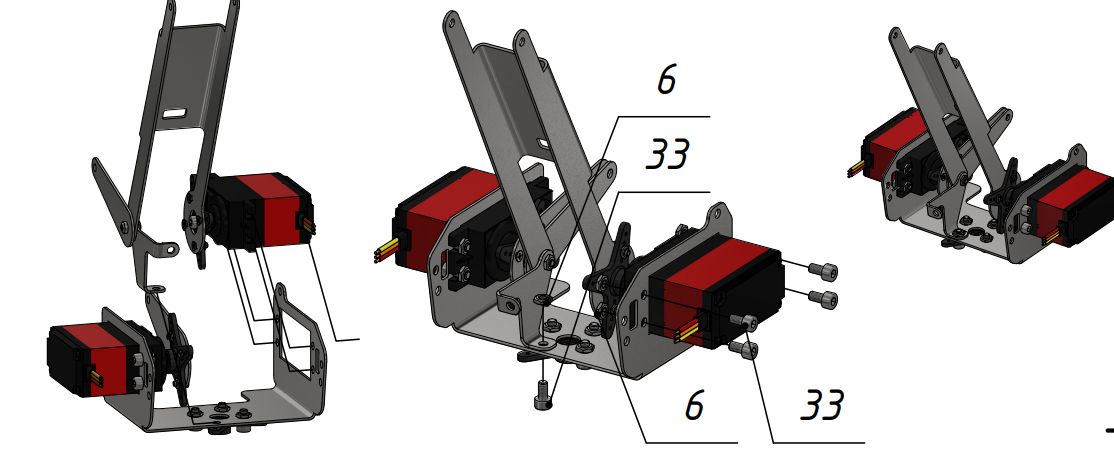
Зафиксируйте фланец на вал двигателя и поверните вал по часовой стрелке до упора
Закрепите рычаг на сервопривод при помощи болта (в комплекте с сервоприводом). Углы поворота рычага должны быть так, как показано на схеме, иначе во время работы рычаг заклинит.
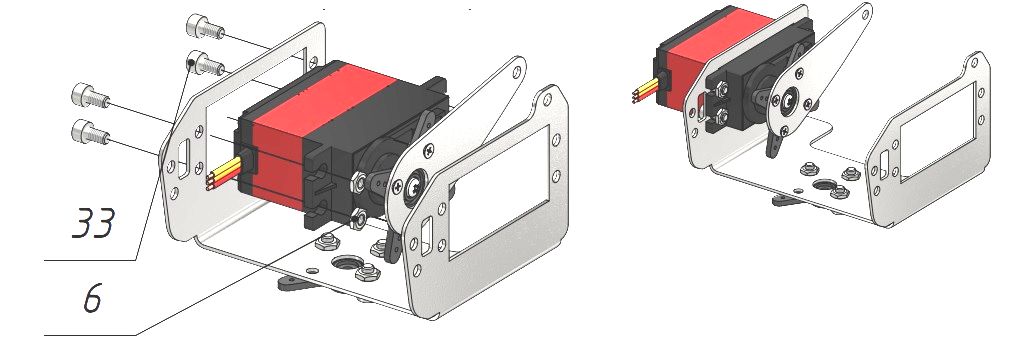
Закрепите Сервопривод на стол с помощью 4 винтов и гаек
Подключите с помощью учителя привод к контроллеру
П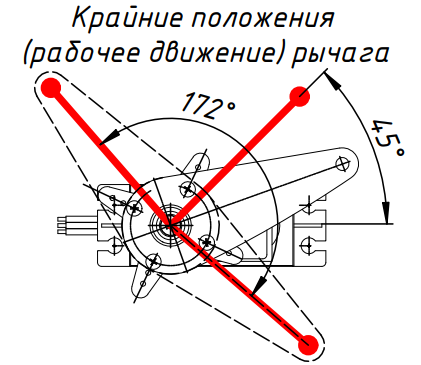 риведите в движение сервопривод, используя программу Arduino IDE
риведите в движение сервопривод, используя программу Arduino IDE



Винт
Гайка
Стол
Код:
#include
Servo servo;
void setup()
{
servo.attach(9);
}
void loop()
{
servo.write(0); //ставим вал под 10
delay(2000); //ждем 2 секунды
servo.write(150); //ставим вал под 150
delay(2000); //ждем 2 секунды
}
Еще пример:
Файл – примеры – Servo – Sweep
Источники:
Сервопривод: что это такое, виды, принцип работы сервомотора - как работает и схема устройства серводвигателя с фото (stanokcnc.ru)
Лабораторные работы. № 12 Сервопривод. Подключение Сервопривода к плате Arduino Mega https://docs.google.com/document/d/1FMvu3D7dh62FPaExymns60Unx_TJwQ_B
Характеристики PDI-6221MG:
Цифровая сервомашинка, сервопривод JX Servo PDI-6221MG-180 купить по низкой цене в Суперайс (supereyes.ru)
Что такое сервопривод (сервомотор) и как им управлять - Суперайс (supereyes.ru)
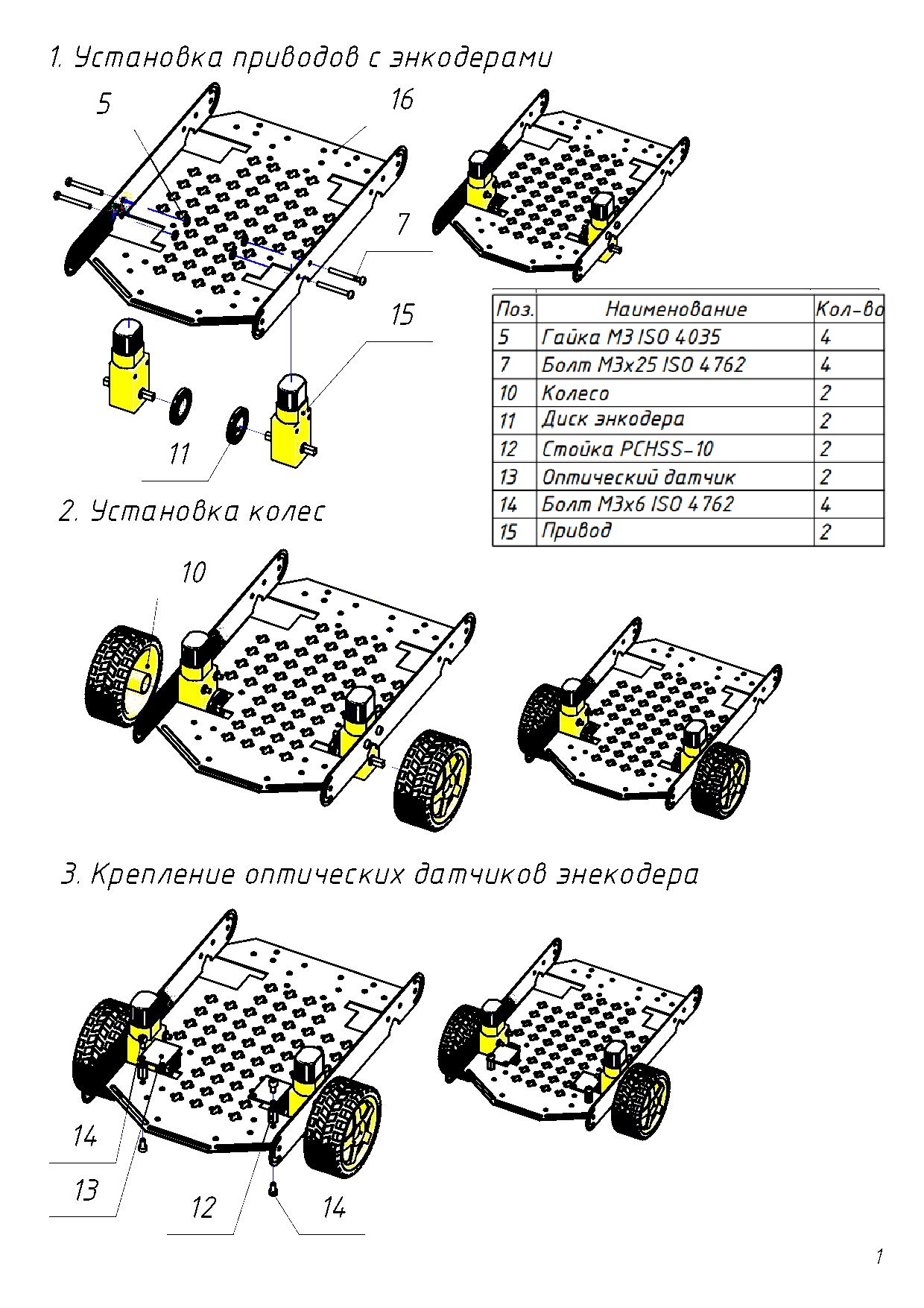
Оборудование: стол, нога, шестигранный шлиц(2,5), отвертка (ph 2мм),
сверло (2 и 3 мм), аккумуляторная дрель (шуруповёрт), винт Мх2(4 шт), гайка Мх2(4 шт), винт М3х6(3 шт.), гайка М3(3 шт.), фланец Х-образный(2 шт.).
Ход урока
Закрепите фланец на стол. Расширьте 4 отверстия фланца сверлом 3мм, второе отверстие от центра. Закрепите винтом и гайкам М3
2. Сборка ноги. Расширьте 4 отверстия фланца сверлом 2 мм, второе отверстие от центра. Закрепите винтом и гайкам М2
3. Закрепите привод к ноге
Обратите внимание на углы поворота рычага, они должны быть как на рисунке. Если ориентация фланца и вала будут неправильны, то рычаг может заклинить
|
|
|
|
|
|
Загрузите скетч в Ардуино:
#include
Servo myservo;
int pos = 0;
int t =50; //задержка
int d =30; //угол поворота
void setup() {
myservo.attach(8); // номер пина
}
void loop() {
for (pos = 0; pos
myservo.write(pos);
delay(t);
}
for (pos = d; pos = 0; pos -= 1) {
myservo.write(pos);
delay(t);
}
}
Подключите по очереди сервоприводы на пин 8 и проверьте их работу. Изменяя переменные t и d, подберите подходящий угол вращения и плавность движения для сервопривода.
Подключите сервоприводы к пинам:
| Сервопривод | пин |
| Центральный | 7 |
| Правый | 8 |
| Левый | 9 |
| Головка | 10 |
| Захват | 11 |
Изменяя, номера пинов в программе, проверьте работу сервоприводов
Проверим работу всех сервоприводов по очереди в одной программе
Загрузите скетч:
#include
Servo servo1; //центральный
Servo servo2; //правый
Servo servo3; //левый
Servo servo4; //головка
Servo servo5; //захват
const uint8_t pinS1 = 7;
const uint8_t pinS2 = 8;
const uint8_t pinS3 = 9;
const uint8_t pinS4 = 10;
const uint8_t pinS5 = 11;
int pos = 0;
int t =50; //задержка
int d =170; //максимальный угол поворота центральный
int d1 =70; // максимальный угол поворота другие
void setup(){
servo1.attach(pinS1);
servo2.attach(pinS2);
servo3.attach(pinS3);
servo4.attach(pinS4);
servo5.attach(pinS5);
}
void loop(){
//центальный
for (pos = 10; pos
servo1.write(pos);
delay(t);
}
for (pos = d; pos = 10; pos -= 1) {
servo1.write(pos);
delay(t);
}
delay(2000);
//правый
for (pos = 10; pos
servo2.write(pos);
delay(t);
}
for (pos = d1; pos = 10; pos -= 1) {
servo2.write(pos);
delay(t);
}
delay(2000);
//левый
for (pos = 10; pos
servo3.write(pos);
delay(t);
}
for (pos = d1; pos = 10; pos -= 1) {
servo3.write(pos);
delay(t);
}
delay(2000);
//головка
for (pos = 10; pos
servo4.write(pos);
delay(t);
}
for (pos = d1; pos = 10; pos -= 1) {
servo4.write(pos);
delay(t);
}
delay(2000);
//захват
for (pos = 10; pos
servo5.write(pos);
delay(t);
}
for (pos = d1; pos = 10; pos -= 1) {
servo5.write(pos);
delay(t);
}
}
Инструкция по сборке манипулятора, файл pdf, https://clck.ru/YXdjT
Лабораторные работы https://docs.google.com/document/d/1FMvu3D7dh62FPaExymns60Unx_TJwQ_B/
Учебный робот SD1-4-320 Учебно-методическое пособие для учителя - https://digis.ru/upload/iblock/668/Robot_Manipulator_SD1_4_320_Metodika_dlya_uchitelya_V2.pdf
Манипулятор рука на ARDUINO. | Робототехника и программирование (portalrabot.ru)
Робот-манипулятор на Arduino||Arduino-diy.com
Подключение и управление манипулятором - Описания, примеры, подключение к Arduino (iarduino.ru)
#include
Servo servo1; //центральный
Servo servo2; //правый
Servo servo3; //левый
Servo servo4; //головка
Servo servo5; //захват
const uint8_t pinS1 = 7;
const uint8_t pinS2 = 8;
const uint8_t pinS3 = 9;
const uint8_t pinS4 = 10;
const uint8_t pinS5 = 11;
int pos = 0;
int t =50; //задержка
int d =170; //угол поворота центальный
void setup(){
servo1.attach(pinS1);
servo2.attach(pinS2);
servo3.attach(pinS3);
servo4.attach(pinS4);
servo5.attach(pinS5);
}
void loop(){
//захват
for (pos = 10; pos
servo5.write(pos);
delay(t);
}
for (pos = 90; pos = 60; pos -= 1) {
servo5.write(pos);
delay(t);
}
//центальный
for (pos = 10; pos
servo1.write(pos);
delay(t);
}
//захват
for (pos = 60; pos
servo5.write(pos);
delay(t);
}
for (pos = 90; pos = 10; pos -= 1) {
servo5.write(pos);
delay(t);
}
//центальный
for (pos = d; pos = 10; pos -= 1) {
servo1.write(pos);
delay(t);
}
delay(1000);
}
https://youtu.be/8CzTaRNLkVs
#include
#include "IRremote.h"
IRrecv irrecv(2); // указываем вывод, к которому подключен ИК приемник
decode_results results;
Servo servo1; //центральный
Servo servo2; //правый
Servo servo3; //левый
Servo servo4; //головка
Servo servo5; //захват
const uint8_t pinS1 = 7;
const uint8_t pinS2 = 8;
const uint8_t pinS3 = 9;
const uint8_t pinS4 = 10;
const uint8_t pinS5 = 11;
int ldr = 0; //пин фоторезистора
int pos = 0;
int t =50; //задержка
int dv =30; //угол левый верхний
int dw =60; //угол левый нижний
int d1 =80; //угол выкл
int d0 =100; //угол вкл
void setup(){
irrecv.enableIRIn(); // запускаем прием
servo1.attach(pinS1);
servo2.attach(pinS2);
servo3.attach(pinS3);
servo4.attach(pinS4);
servo5.attach(pinS5);
//центальный
for (pos = 0; pos
servo1.write(pos);
delay(t);
}
}
void loop(){
if ( irrecv.decode( &results )) { // если данные пришли
switch ( results.value ) {
case 0x20DF40BF:
digitalWrite( 13, HIGH );
//центальный на включение
for (pos = 90; pos
servo1.write(pos);
delay(t);
}
//левый вниз верх
for (pos = dw; pos = dv; pos -= 1) {
servo3.write(pos);
delay(t);
}
for (pos = dv; pos
servo3.write(pos);
delay(t);
}
break;
case 0x20DFC03F:
//центальный на выключение
for (pos = d0; pos = d1; pos -= 1) {
servo1.write(pos);
delay(t);
}
//левый вниз верх
for (pos = dw; pos = dv; pos -= 1) {
servo3.write(pos);
delay(t);
}
for (pos = dv; pos
servo3.write(pos);
delay(t);
}
//центальный в центр
for (pos = d1; pos
servo1.write(pos);
delay(t);
}
digitalWrite( 13, LOW );
break;
}
irrecv.resume(); // принимаем следующую команду
}
}
Лабораторная работа № 14 ИК-датчик и ИК пульт [2:]
https://youtu.be/SGoiqRdGrhQ








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

