Россия, Лиски


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до 25.06.2025
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 13.01.2025 15:15

Васильев Андрей Александрович
преподаватель дисциплин профессионального цикла
Местоположение
Специализация
Комплектование МТА
Категория:
Прочее
16.01.2018 00:53

Просмотр содержимого документа
«Комплектование МТА»
ГБПОУ ВО «Лискинский аграрно-технологический техникум»
КОНКУРС
«ПЕДАГОГ ГОДА 2017»
- ТЕМА:
- Комплектование: способы движения МТА
Выполнил:
преподаватель ВКК
Васильев А.А.
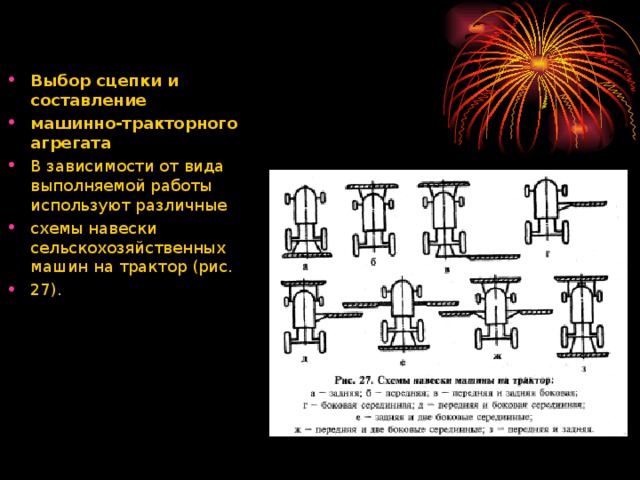
- Выбор сцепки и составление
- машинно-тракторного агрегата
- В зависимости от вида выполняемой работы используют различные
- схемы навески сельскохозяйственных машин на трактор (рис.
- 27).
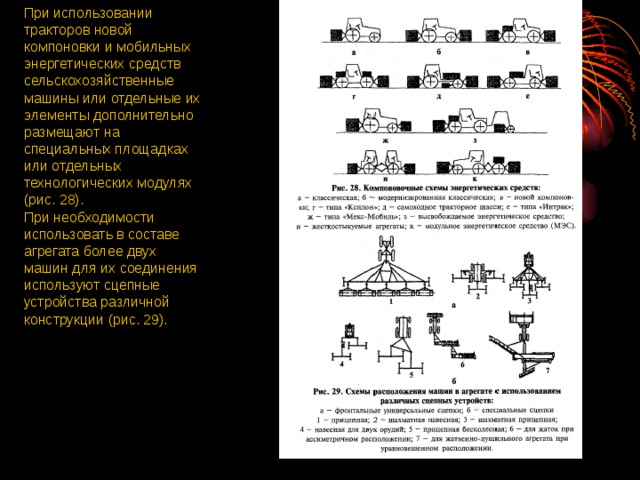
При использовании тракторов новой компоновки и мобильных
энергетических средств сельскохозяйственные машины или отдельные их элементы дополнительно размещают на специальных площадках
или отдельных технологических модулях (рис. 28).
При необходимости использовать в составе агрегата более двух
машин для их соединения используют сцепные устройства различной
конструкции (рис. 29).

Операции по технологической настройке машин удобно производить на специально оборудованных площадках, расположенных на машинном дворе. Схема универсальной площадки для центральных районов приведена на рис. 30. Площадка предназначена для
проверки геометрических схем новых и отремонтированных машин после сборки, для расстановки рабочих органов, наладки на заданные
режимы работы плугов, лемешных лущильников, прицепных и навесных культиваторов, культиваторов-плоскорезов, зерновых сеялок. Разметка площадки, комплект разметочных шаблонов и приспособлений позволяет облегчить и повысить качество настройки машин на заданный режим работы. Соблюдение установленного режима работы проверяют в поле
Рабочий ход — это движение МТА, при котором выполняется непосредственная технологическая операция — пахота, посев, культивация,
скашивание, выкопка корнеклубнеплодов и т.п.
Холостой ход — это движение, при котором полезная работа по
данной технологической операции не выполняется. Холостые виды
движения можно разделить на две группы:
1 ) холостые ходы, связанные с рабочими процессами (холостые
заезды и повороты при производительной работе на загонах
или у мест погрузки удобрений, произведенной продукции и т.п.);
2 ) вспомогательные холостые ходы при переезде с места стоянки
МТА к полю, при переезде с одного поля на другое и т.д.
Первый вид холостого движения зависит от форм движения агрегата,
размеров и конфигурации загона и кинематических характеристик
самого МТА, от геометрических форм и размеров элементов,
из которых складывается его движение. Траектория движения
агрегата при выполнении с/х работ состоит из прямолинейных
отрезков (движение по прямой линии) и из криволинейных (криволинейное
движение вокруг некоторых центров) (рис. 31).
Кинематическими характеристиками машинно-тракторного агрегата
являются:
1. Радиус и центр поворота;
2. Длина выезда агрегата из борозды для разворота;
3. Кинематический центр;
4. Кинематические длина и ширина;
5. Ширина колеи и величина продольной базы трактора (комбайна);
6 . Ширина захвата агрегата.
Радиусом поворота (R) (рис. 32) агрегата называют расстояние
от центра агрегата до точки, вокруг которой происходит поворот
агрегата.
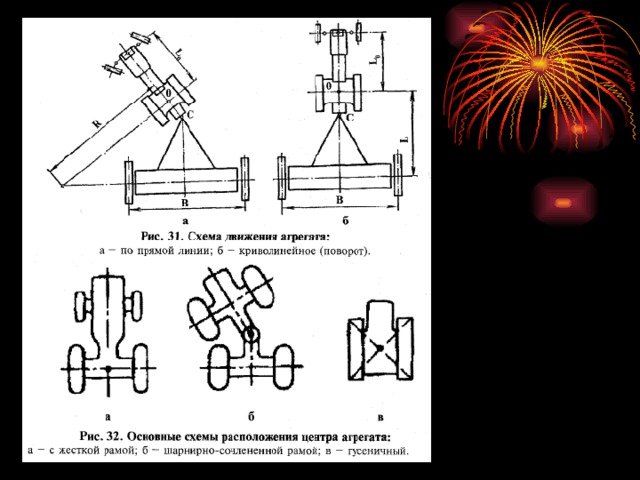
Центром поворота агрегата называют точку Oj (рис. 31), вокруг которой происходит движение центра агрегата по дуге радиусом R.
Кинематическим центром агрегата называют условную геометрическую точку на плоскости движения (поверхности поля) траектория которой рассматривается как траектория МТА при движении
по полю.
Центр агрегата О - она располагается на середине ведущей оси колесного трактора с жесткой рамой (МТЗ-80) (рис. 32,а); в центре шарнира для тракторов с шарнирно-сочлененной рамой (Т-150К)
(рис. 32,6); точки пересечения диагоналей, проведенных через края гусениц — для гусеничных тракторов (рис. 32,в).
Кинематической длиной агрегата называют проекцию расстояния между центром агрегата и линией, перпендикулярной продольной оси трактора и проходящей через наиболее удаленные по ходу МТА точки рабочих органов машины при прямолинейном движении. Кинематическая длина агрегата равна сумме кинематических длин трактора, сцепки и рабочей сельскохозяйственной машины (орудия). Расстояние е от центра агрегата до самых крайних (позади агрегата) рабочих органов сельскохозяйственных машин называют длиной выезда агрегата. Она характеризует длину, на которую необходимо переместить центр агрегата от линии начала работы, с целью вывода рабочих органов сельскохозяйственной машины или орудия на линию начала или окончания работы.
Кинематической шириной агрегата dK называют расстояние между проекциями на поверхность поля продольной оси трактора и параллельной линии, проходящей через наиболее удаленную точку агрегата.
Ширина колеи, величина продольной базы трактора, ширина захвата МТА являются основой для расчета поворотной полосы.
Основные виды поворотов машинотракторных агрегатов.
- Основными видами поворотов, применяемыми при заездах машинно-
- тракторного агрегата для работы на делянку (поле) являются
- повороты на 90° и на 180°.
- Повороты на 90° совершают при холостых заездах с выключенными
- рабочими органами машин или орудий или при круговой
- работе без выключения.
- Повороты на 180° производятся, главным образом, при холостых
- заездах во время гоновой работы. В зависимости от расстояния
- между рабочими ходами агрегата, заезды при поворотах бывают
- петлевые и беспетлевые.

Основные виды поворотов машинотракторных агрегатов.
- Петлевые повороты по форме могут быть грушевидные, восьмеркообразные
- и грибовидные (Рис. 33). Наименьшая длина холостого
- хода достигается, если поворот произведен с кривизной, равной
- наименьшему радиусу поворота агрегата. При последующих поворотах
- расстояние между началом петлевого заезда и его концом
- увеличивается. Средняя длина петлевого заезда не зависит от соотношения
- между захватом агрегата и его радиусом и может быть
- принята равной при заезде грушевидной петлей 6 R, а при заезде
- восьмеркообразной петлей - 8,4R. Следовательно, петлевые восьмеркообразные
- повороты имеют большую длину заездов, и, следовательно,
- не выгодны в сравнении с грушевидными.
- Петлевые повороты перестают быть выгодными, когда расстояние
- между началом и концом заезда достигает 2R.
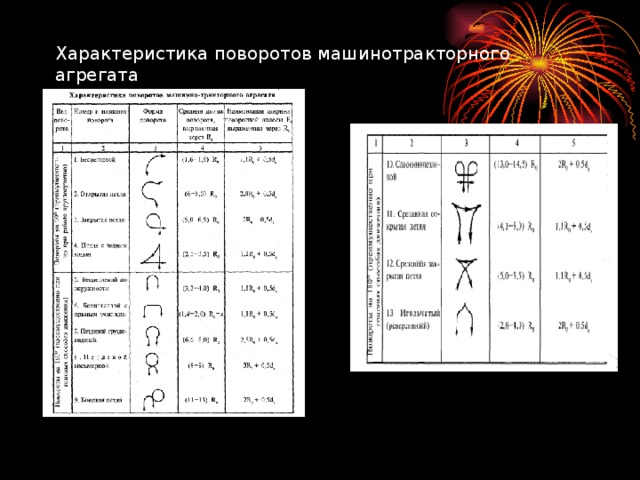
Характеристика поворотов машинотракторного агрегата
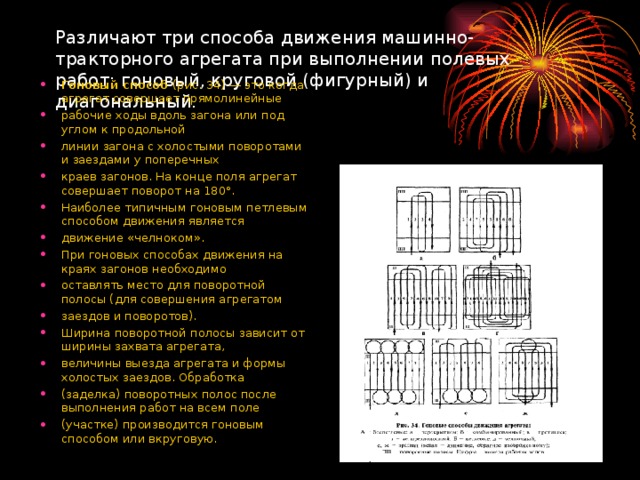
Различают три способа движения машинно-тракторного агрегата при выполнении полевых работ: гоновый, круговой (фигурный) и диагональный.
- Гоновый способ (рис. 34) — это когда агрегат совершает прямолинейные
- рабочие ходы вдоль загона или под углом к продольной
- линии загона с холостыми поворотами и заездами у поперечных
- краев загонов. На конце поля агрегат совершает поворот на 180°.
- Наиболее типичным гоновым петлевым способом движения является
- движение «челноком».
- При гоновых способах движения на краях загонов необходимо
- оставлять место для поворотной полосы (для совершения агрегатом
- заездов и поворотов).
- Ширина поворотной полосы зависит от ширины захвата агрегата,
- величины выезда агрегата и формы холостых заездов. Обработка
- (заделка) поворотных полос после выполнения работ на всем поле
- (участке) производится гоновым способом или вкруговую.
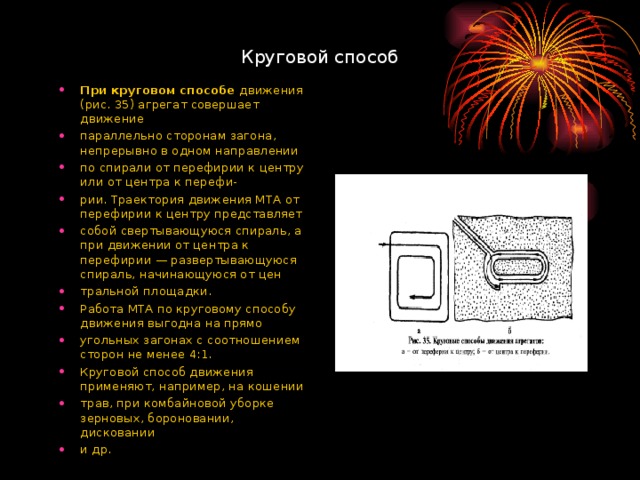
Круговой способ
- При круговом способе движения (рис. 35) агрегат совершает движение
- параллельно сторонам загона, непрерывно в одном направлении
- по спирали от перефирии к центру или от центра к перефи-
- рии. Траектория движения МТА от перефирии к центру представляет
- собой свертывающуюся спираль, а при движении от центра к перефирии — развертывающуюся спираль, начинающуюся от цен
- тральной площадки.
- Работа МТА по круговому способу движения выгодна на прямо
- угольных загонах с соотношением сторон не менее 4:1.
- Круговой способ движения применяют, например, на кошении
- трав, при комбайновой уборке зерновых, бороновании, дисковании
- и др.
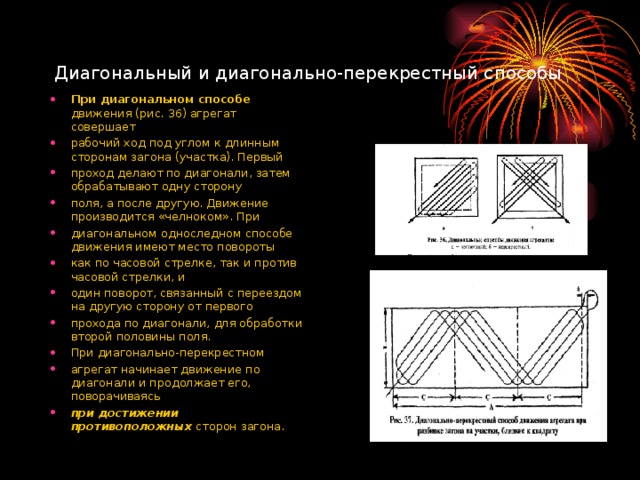
Диагональный и диагонально-перекрестный способы
- При диагональном способе движения (рис. 36) агрегат совершает
- рабочий ход под углом к длинным сторонам загона (участка). Первый
- проход делают по диагонали, затем обрабатывают одну сторону
- поля, а после другую. Движение производится «челноком». При
- диагональном односледном способе движения имеют место повороты
- как по часовой стрелке, так и против часовой стрелки, и
- один поворот, связанный с переездом на другую сторону от первого
- прохода по диагонали, для обработки второй половины поля.
- При диагонально-перекрестном
- агрегат начинает движение по диагонали и продолжает его, поворачиваясь
- при достижении противоположных сторон загона.
Заключение
- Чем выше коэффициент рабочих ходов, тем выше производительность МТА. Выбор способа движения зависит от вида выполнения технологического процесса (пахота, поверхностная обработка почвы, посев, посадка, кошение трав, уборка и т.п.), конструкционных параметров машин и агрегата, конфигурации и размеров поля, предшествующей обработке, агротехнических требований, принятой организации проведения работ.
- Выбор способов движения направлен на получение максимальной производительности МТА при высоком качестве выполнения технологического процесса с минимальными затратами энергии (горючего, электроэнергии), обеспечение безопасности для обслуживающего персонала и наименьшего вреда окружающей среде.














Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ