
Россия, Смоленск


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 07.05.2025 08:27

Левчук Наталья Владимировна
учитель математики и физики
50 лет
Местоположение
Специализация
Проект БЛА самолетного типа
Категория:
Физика
04.11.2024 06:56

Просмотр содержимого документа
«Проект БЛА самолетного типа»
Муниципальное бюджетное общеобразовательное учреждение
Пригорская средняя школа
Смоленского района Смоленской области
XV Открытая научно - практическая конференция с международным участием научного общества учащихся «Эврика»
Исследовательская работа
"Беспилотный летательный аппарат для доставки медикаментов в труднодоступные места"
Выполнил работу:
Опалев Лев
Александрович,
учащийся 10 класса
Руководитель:
Левчук Наталья
Владимировна,
учитель физики
Смоленск
2022
Оглавление.
Введение……………………………………………………….3
Основная часть……………………………………………….5
Глава 1. Выбор компоновки и проектирование БПЛА………5
Глава 2. Изготовление БПЛА…………………………................7
Глава 3. Испытание ……………………………………………..19
Глава 4. Сравнение с аналогами……………………….............22
III. Заключение…………………………………………….............26
Приложения…………………………………………….........27
Список использованной литературы…………………….28
I. Введение
С каждым годом беспилотные технологии все больше входят в нашу жизнь. Но, не смотря, на то, что первые беспилотники появились еще в первой половине XX-го века, на данный момент в гражданском секторе они применяются крайне ограниченно. Лидирующее положение среди сфер деятельности БПЛА занимает аэросъемка. Можно без каких-либо проблем приобрести или заказать квадрокоптер любого размера, цена на «детские» редко превысит 15 тыс. руб. Но этой категории аппараты являются не более чем игрушкой, редко на них можно установить небольшую камеру, а о транспортировке грузов и речи быть не может. Специализированные для съемки аппараты обойдутся в гораздо большую сумму, не менее 30 тыс. руб. Хоть и выполняют они свои задачи достаточно хорошо, все же имеют весьма жесткие ограничения по дальности и продолжительности полета на одном заряде, поэтому их применение для транспортировки грузов на значительные расстояния, в условиях, когда поменять батарею не представляется возможным, стоит под большим вопросом.
БПЛА на данный момент освоили множество специализаций, это и съемка, и картографирование местности, и химические работы на полях. Применение квадрокоптера для этих задач оптимально, т. к. ранее применялись и применяются пилотируемые самолеты и вертолеты, что естественно дороже и сложнее, ведь при эксплуатации программируемых БПЛА, оператору следует только вовремя заменять батареи. Но когда речь о быстрой доставке грузов на значительные расстояния, в места с минимальной инфраструктурой лучшим
решением будет беспилотный малоразмерный самолет. А когда необходимо доставить жизненно важные продукты и медикаменты в отдаленные уголки, вопрос стоит наиболее остро.
Цель работы: создать и испытать прототип многофункционального беспилотного аппарата.
Задачи работы:
Разработать прототип-дублер многофункционального беспилотного аппарата при максимальном использовании современных методов проектирования.
По чертежам создать рабочую модель с допустимой степенью автоматизации и применения современного оборудования.
Провести комплекс летных испытаний.
Провести сравнение изготовленного аппарата с его ближайшими конкурентами в классе, и обосновать доводы расчетами.
Разработать концепцию применения аппарата и продумать возможные сферы деятельности аппарата.
Актуальность: В нашей стране есть множество населенных пунктов доступ, к которым либо отсутствует, либо часто осложнен в силу погодных условий местности. В этих регионах, так же, как и в других, большое количество людей нуждаются в медикаментах. Поэтому создание дешёвого, простого в эксплуатации БПЛА, который способен осуществлять частые скоростные полеты с дальнейшей выгрузкой или сбросом грузов имеет место быть.
Основная часть
Глава 1. Выбор компоновки и проектирование БПЛА
В начале, хочу сказать, что изделие является лишь концептуальным прототипом, рабочей моделью для визуализации возможного облика реального БПЛА и представления функционирования основных узлов и агрегатов.
Как и любое проектирование, создание подобной модели начинается с рассмотрения основных характеристик, в нашем случае – скорость и вес груза.
Схема изделия – однодвигательный самолет с верхним расположением крыла. Плавные обводы, тонкий аэродинамический профиль крыла, и плавная геометрия крыла придает конструкции большую «чистоту» с аэродинамической точки зрения. Многие решения призваны минимизировать сопротивление тем самым повысить скорость аппарата. В центральной части фюзеляжа (корпус самолета), под крылом, есть специально выделенное пространство для подвески контейнера с грузом.
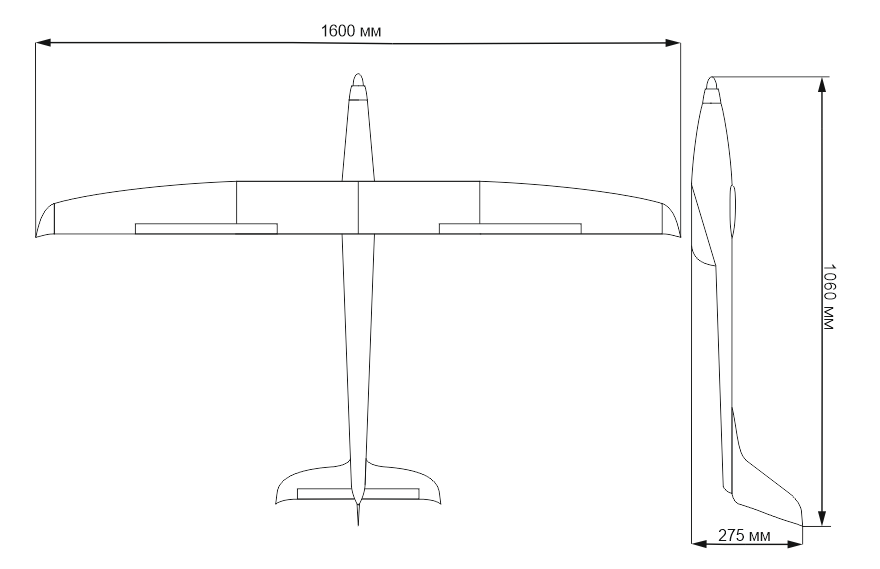
Габаритный чертеж будущего изделия.
При выборе материалов, из которых будет изготовлено изделие стоит учесть: легкость, прочность и простоту обработки. Поэтому подавляющая часть несущего каркаса была изготовлена из 3 мм фанеры. Особо напряженные элементы конструкции усилены углепластиком и алюминием. В качестве наполнителя был выбран поливинилхлоридный пенопласт марки ПС-40. Этот пенопласт крайне устойчив к сжатию, что положительно скажется на прочности конструкции. Обшивка изделия выполнена в напряженных местах, из тонкого ПС-40, в остальных, из тонкого экструдированного пенопласта. Выбранные материалы обеспечат дешевизну изготовления и стойкость к погодным условиям.
Что касается силовой установки и оборудования, все задолго, до начала работ было приобретено, так как это тесно связанно с моим хобби. Двигатель аппарата – электрический, бесколлекторный, приводящий во вращение тянущий воздушный винт. Обороты двигателя контролируются регулятором оборотов. Для маневрирования и изменения положения аппарата в воздухе используются отклоняемые аэродинамические поверхности, создающие моменты сил, изменяющие положение самолета. Эти поверхности приводятся в движение миниатюрными сервоприводами. Замок, удерживающий контейнер с грузом так же снабжен приводом. Все эти компоненты подсоединены к приемнику радиосигнала, исходящего от пульта управления. Питает всю систему литий-полимерный аккумулятор. Предусмотрена установка миниатюрной камеры для слежения отработки всех подвижных узлов.
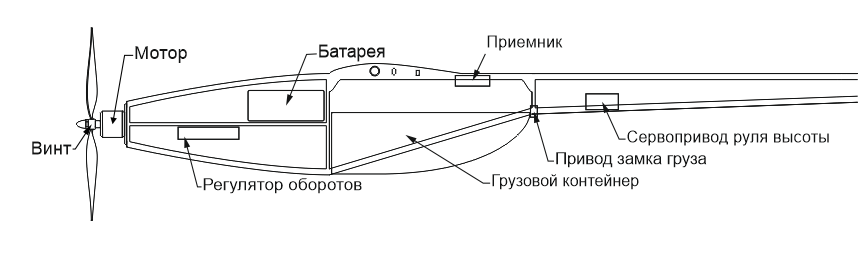
Компоновочный чертеж с основными агрегатами.
Глава 2. Изготовление БПЛА
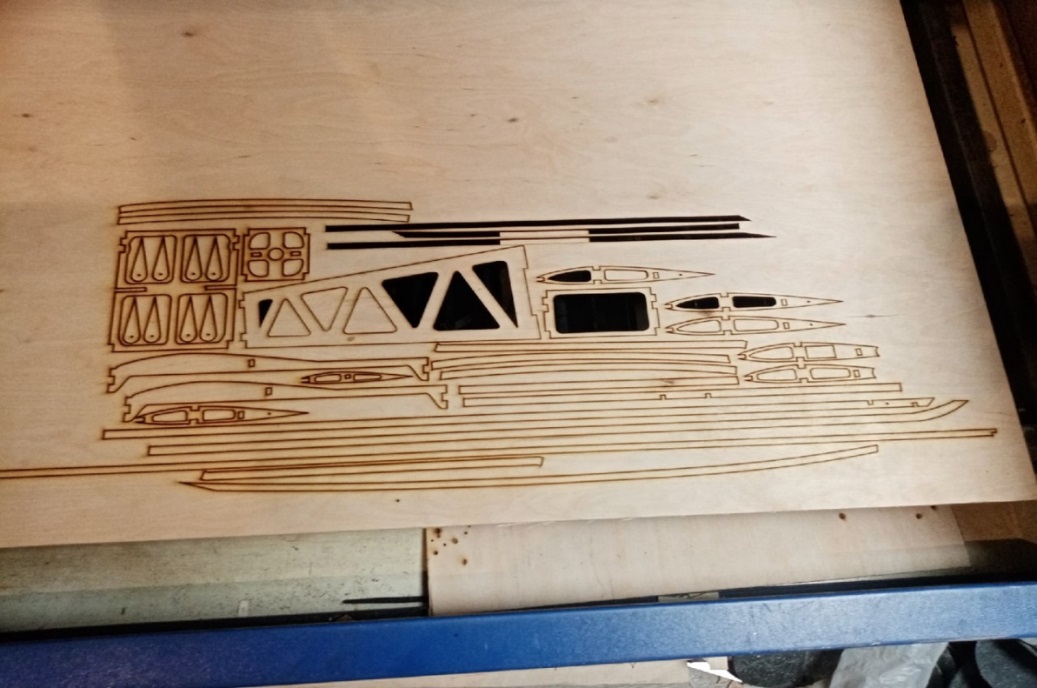
Постройка изделия начинается с создания цифровой модели. Применяя подобный метод проектирования можно заранее продумать и визуализировать многие элементы конструкции, что исключает ошибки на этапе сборки и ускоряет процесс создания. После детальной проработки аппарата необходимо «разбить» конструкцию на отдельные элементы и подготовить макет (цифровой раскрой) для резки на ЧПУ лазерном станке. Данный метод резки в значительной мере увеличивает точность и скорость обработки деталей, после которого, элементы силовой конструкции собираются по заданным меткам подобно детскому конструктору.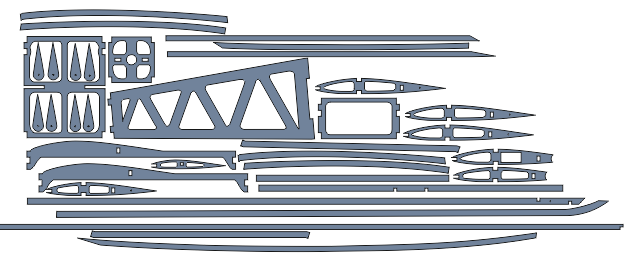
Цифровой «раскрой» силовых деталей.

Собранный силовой каркас фюзеляжа.
После сборки каркаса в местах наибольшего напряжения добавлены проставки из ПС-40. Далее каркас обшивается тонким, 2 мм пенопластом (подложка под ламинат).
Хвостовое оперение выполнено из 2х слоев потолочной плитки, с фанерным лонжероном. Обработка и придание специальной обтекаемой формы производилось вручную, наждачной бумагой. На хвостовое оперение навешены на петли «рули», ключевой их особенностью является полное отсутствие внешних кронштейнов и тяг, что уменьшает сопротивление. К рулям через специальные тяги подсоединены сервоприводы. Сверху оперение обклеено скотчем, для придания большей жесткости и защиты от влаги.

Горизонтальное оперение.

На фото установлено вертикальное оперение и основные стойки шасси.

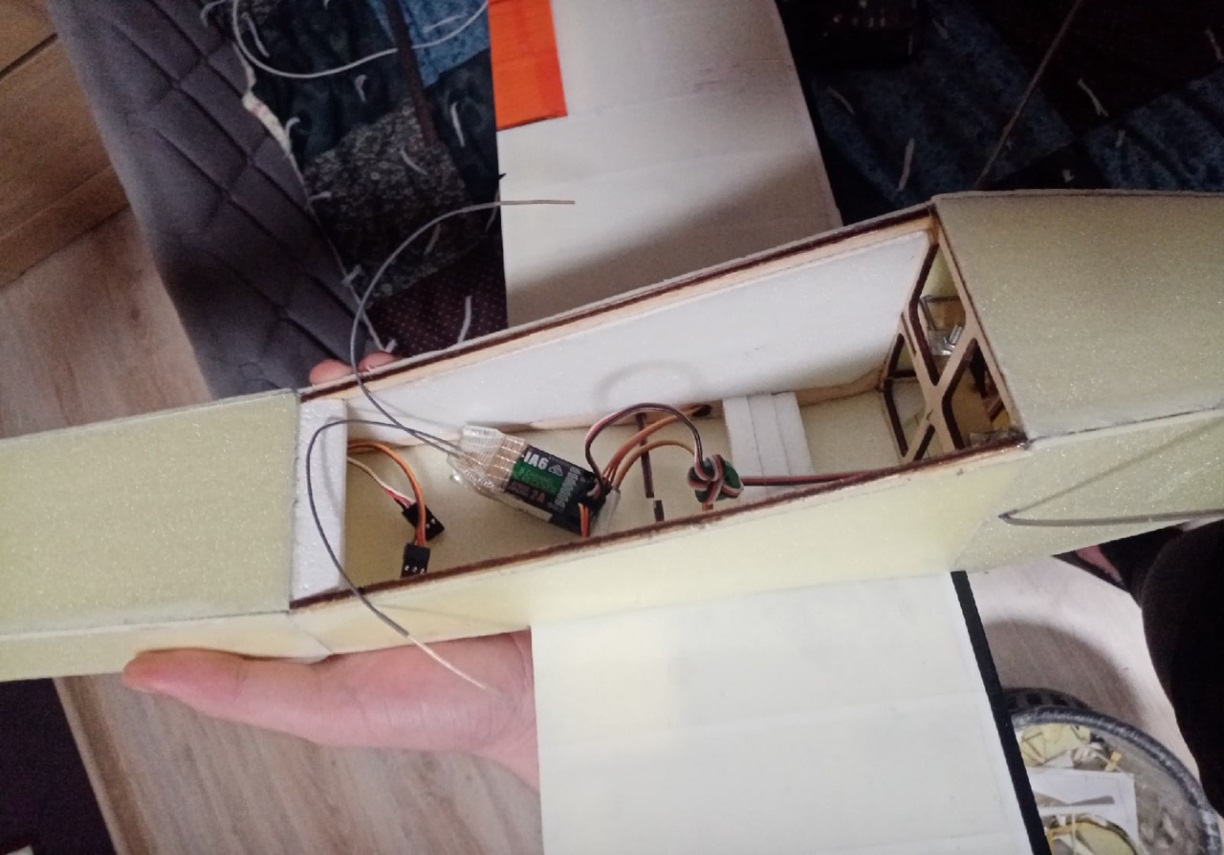
Процесс оклейки каркаса пенопластовыми панелям. В верхней части корпуса на пустом участке, в месте установки консоли крыла, видно два отверстия: одно для проводов, другое – торец отформованной из стеклоткани трубки (элемент крепления консолей крыла.).
 Наполовину обшитая консоль крыла, виден сервопривод с проводом, пенопластовые проставки и вклеенную стеклопластиковую трубку (в нее продевается алюминиевая трубка, соединяющая фюзеляж и консоли).
Наполовину обшитая консоль крыла, виден сервопривод с проводом, пенопластовые проставки и вклеенную стеклопластиковую трубку (в нее продевается алюминиевая трубка, соединяющая фюзеляж и консоли).
Далее на консоли были повешены флапероны (рули выполняющие две функции: при дифференциальном отклонении, одна консоль наклоняется вниз, другая вверх и наоборот, при синхронном отклонении, рули работают как закрылки и создают дополнительную подъемную силу на взлете и посадке). Конструкция рулей такова, что щель между обшивкой крыла и непосредственно рулем составляет чуть более 1 мм, что улучшает скорость.

Панель руля. (изготовленная по способу струнной резки)

Готовый, полностью обклеенный скотчем руль в крайнем нижнем положении. Хорошо заметно отсутствие щели.
Консоли крыла так же обклеены скотчем: сверху черным, снизу белым для визуального отличия во время полета.

Почти готовый аппарат. Виден полностью обшитый фюзеляж и уже установленный миниатюрный электродвигатель.
Нижняя часть корпуса выделяется большим внутренним объемом, что упрощает обслуживание и позволяет загрузить контейнер большей ёмкости.
После обклейки фюзеляжа скотчем, в носовой части сделан лючок, закрывающий батарейный отсек.


Открытый и закрытый батарейный отсек.
Из тонкого пенопласта изготовил грузовой контейнер. С передней стороны он закрепляется двумя крючками за силовой шпангоут, с задней стороны контейнер держит подвижный замок на сервоприводе, который отпирается при переключении тумблера пульта управления с дальнейшим слетом контейнера с крючков.

Виден закрытый замок и отверстие для объектива камеры.

Готовый самолет на импровизированной взлетной полосе – дорожке стадиона. Фото после второго испытательного полета.
Глава 3. Испытание
Что бы убедится в пригодности конструкции к полету, оценить управляемость и в принципе «летучесть», неотъемлемым являются испытательные полеты.
В общей сложности на данный момент было проведено 3 полноценных полета, в которых машина выходила на заграничные режимы работы, в которых аппарат проявил себя крайне стабильно. На крутых виражах тенденция к срыву в штопор не выявлена, что является показателем достаточной площади горизонтального оперения. На высокой скорости и при резких маневрах вибрации не проявляются – показатель того что при проектировании был заложен немаленький запас прочности.
Во втором полете для оценки скорости, была реализована нехитрая система: на снегу, красным баллончиком были сделаны 2 отметки, расстояние между которыми приблизительно, «по шагам» 40 метров, после чего на установленную в грузовом контейнере камеру объективом вниз было заснято несколько проходов по точкам. Просматривая видео можно засечь время прохода, в первом проходе время составило 2 секунды, во втором 2,2 секунды. После чего переведя метры в километры (40 м = 0,04 км) и секунды в часы (2,1 с = 0,0006 ч), по формуле V=S/t можно найти скорость, в округлении получается 70 км/ч. Расчетная скорость, которую способен развить аппарат с более мощным двигателем, варьируется около 150 км/ч. Подобный диапазон рабочих скоростей, не может не радовать, ведь на точность сброса полезного груза влияет так же минимальная скорость, с которой аппарат способен лететь.
Следующим этапом испытаний, стали сбросы грузового контейнера с парашютом и без. Для проверки работы системы сброса в контейнер установили грузы общей массой 150 грамм, и произведено 2 удачных отделения контейнера с малой высоты. Для заметности, к грузу привязал красную ленту.

Сброс с парашютом проходил на высоте в 4 раза превышающую эффективную (около 180 метров). (представлено в видео по ссылке в приложении)
Концептуальный принцип действия
Для обеспечения эффективной работы, созданный мною аппарат не совсем подходит, но его создание и испытания дали понять, что концепция применения вполне реальна. Дабы увеличить возможности моей конструкции, аппарат стоит дополнить рядом мер:
Корпус и обшивка должны быть отформованы из стеклопластика. Подобное решение позволит уменьшить трудозатраты в массовом производстве, что сделает аппарат более доступным для приобретения различными гражданскими ведомствами. Так же, решение положительно скажется на массе конструкции и позволит сделать стенки корпуса гораздо тоньше, что увеличит полезную нагрузку и расширит комплекс электронного оборудования.
Взлет аппарата должен осуществляться с помощью пружинной катапульты, подобная система давно освоена в военных беспилотниках схожей размерности, она упрощает эксплуатацию и исключает надобность в использовании громоздкого и тяжелого шасси. Посадка должна производится либо в густую траву, на специально усиленную пластину корпуса, либо с использованием посадочного парашюта, что позволяет полностью автоматизировать самолет.
Аппарат должен оснащаться полетным контроллером, по сути автопилотом, и GPS/ГЛОНАСС – модулем. С помощью этих систем, непосредственного контроля над аппаратом не требуется, он становиться полностью автономным в воздухе, оператору перед вылетом лишь необходимо обозначить маршрут и точку сброса груза.
Алгоритм применения:
Предполетная подготовка, включающая установку заряженного аккумулятора, погрузка медикаментов и занесение в полетный контроллер координат сброса.
Катапультный взлет и набор рабочей высоты
Выход на точку сброса со снижением (дабы избежать снос ветром парашюта с грузом) с последующим сбросом.
Возврат в точку взлета и автоматическая посадка на парашюте.
Глава 4. Сравнение с аналогами.
Для более наглядного сравнения моего аппарата и его ближайшего визави – квадрокоптера, стоит рассмотреть 2 схемы с идентичным комплексом оборудования, т.е. запчасти и электроника одного и того же наименования.
Если говорить о квадрокоптере, то его неоспоримым достоинством всегда являлись возможность зависать на месте и сравнительно большая подвесная нагрузка, особенно по отношению к собственному весу. Из явных недостатков выделяются низкая максимальная скорость, высокий расход электричества и как следствие, не самая большая дальность работы.
Самолетная схема же в свою очередь по понятным причинам лишена возможности зависать на месте, вертикально взлетать и садиться, но в отличие от квадрокоптера или вертолета подъемная сила создается не двигателями, а крылом, в силу этого обстоятельства минимальная тяга двигателя, надобная для стабильного полета кратно меньше собственного веса. Данная характеристика имеет название «тяговооруженности» и является отношением тяги двигателя к полетной массе аппарата. Грубо говоря, минимальная потребная тяговооруженность самолета равна 0,3. Безусловно, можно и меньше, но динамические и взлетные характеристики будут неудовлетворительными. Для вертолета или квадрокоптера минимальная тяга хотя бы для стабильного висения должна быть равная полетной массе, не говоря уже о наборе высоты и полете на максимальной скорости. Что еще сразу бросается в глаза, так это количество двигателей. У квадрокоптера, что следует из названия, их четыре, а это значит, что и 4 регулятора оборотов, в отличие от самолета у которого всего по одному. Таким образом, эксплуататор платит больше за двигатели и усложняет себе обслуживание и ремонт после поломки.
Представим квадрокоптер и самолет. На обоих установлены электродвигатели одной марки и идентичные винты, мощность двигателя на максимальном режиме работы 170 Вт, соответственно у квадрокоптера в 4 раза больше суммарная мощность, то есть 680 Вт. На обоих машинах установлен один литий-полимерный аккумулятор с максимальным напряжением 11 В и максимальной емкостью 2,2 Ач. Из определений мощности и емкости можно вывести формулу для расчета максимально возможного времени работы силовой установки: t = (С*U) / P, из чего выходит, что при переводе из часов в минуты, максимальное время работы двигателя самолета не превышает 8,5 мин, а время работы квадрокоптера не более 2,1.
Соответственно если подставить полученную мною скорость (20 м/c) и среднюю скорость груженого квадрокоптера (10 м/с), без учета взлета и набора высоты, получим дальность самолета S = 8,5*60*20 = 10200 м, то есть эффективная дальность самолета составляет 5,1 км, с учетом возврата на место старта, а дальность полета квадрокоптера будет равна S = 2,1*60*10 = 1260 м, утрируя, он может улететь всего лишь на 600 метров, разница на лицо. Разумеется, есть пути улучшения характеристик квадрокоптера, один из которых, это банальная установка батареи большей емкости, но опять же эта полумера идет в убыток массе груза и что, не мало важно, увеличивает время зарядки батареи, что пагубно отражается на оперативности доставки, что в купе с невысокой максимальной скоростью, можно сказать, ставит крест на применении квадрокоптера в роли скоростного доставщика медикаментов. А преимущество зависания, которое оптимально для сьемки с воздуха, при котором, к слову, квадрокоптер нуждается в минимальной тяге и по времени работы может оказаться даже экономичнее самолета, нивелируется в силу того, что в 95% времени работы зависание попросту не используется.
Ниже приведена сравнительная таблица квадрокоптера и самолета.
|
| Самолет | Квадрокоптер |
| m корпуса | 400 г | 150 г |
| m двигателей | 320 г | 80 г |
| m батареи | 120 г | 120 г |
| Полетная масса | 600 г | 600 г |
| Макс. m груза | 2000 г | 400 г |
Из таблицы следует, что при равных полетных массах, самолет в несколько раз уступает квадрокоптеру в максимальной массе груза, но так как медикаменты в большинстве своем весят немного и в приоритете стоит именно скорость и дальность, самолет больше подходит для решения задач доставки.
Если говорить о перспективах развития тематики и экономической части, то задел на модификации у самолета ограничивается только лишь внутренним объемом и массой, что позволяет варьировать комплектацию в зависимости от возможностей заказчика и условий эксплуатации. Скажем, для крайне суровых мест использования, вплоть до мобильных пунктов, есть возможность установки небольшого двигателя внутреннего сгорания, рабочим объемом от 20 до 45 см^3, подобные двигатели крайне распространены в различных инструментах: бензорезы, бензопилы и т.д., подобная мера позволит отказаться от зарядной станции, работающей от сети, топливом может служить автомобильный бензин. При такой конверсии стоимость аппарата несколько возрастет, но взамен эксплуататор получит неприхотливый беспилотник. Чего нельзя сказать о квадрокоптере, ведь синхронизировать 4 ДВС и достичь надежности системы, мало кому еще удавалось.
Кроме доставки медикаментов самолет может брать на себя и другие, не мало важные задачи. При установке соответствующего оборудования, так, при установке модуля с камерами высокого разрешения, миниатюрными тепловизором или лидаром, беспилотник получит возможность выполнять задачи авиалесохраны, слежение за популяцией редких видов животных, картографирование местности, оперативное обнаружение очагов возгорания и сборы данных о температуре и давлении на удалении порядка 100-150 км. При установке громкоговорителей, аппарат будет способен, оперативно предупредить жителей отдаленного населенного пункта, о надвигающимся бедствии, или сбросить информационные листовки. Так же допустимо применение аппарата в качестве ретранслятора мобильной связи. И этот список на самом деле можно дополнять еще долго.
Основная комплектация доставщика будет наиболее бюджетной, цена за одну единицу не превысит 50 тыс. руб., в то время как квадрокоптер схожей весовой категории обойдется минимум в 200 тыс. руб.
III. Заключение
В процессе работы я ставил для себя задачи:
Разработать прототип-дублер многофункционального беспилотного аппарата при максимальном использовании современных методов проектирования. Задача выполнена – изготовлена конструкторская документация и базовые чертежи.
По чертежам создать рабочую модель с допустимой степенью автоматизации и применения современного оборудования. Задача выполнена – продукт изготовлен.
Провести комплекс летных испытаний. Задача выполнена – конструкция подтвердила жизнеспособность, сняты основные характеристики.
Провести сравнение изготовленного аппарата с его ближайшими конкурентами в классе, и обосновать доводы расчетами. Задача выполнена – выявлены преимущества и недостатки продукта.
Разработать концепцию применения аппарата и продумать возможные сферы деятельности аппарата. Задача выполнена.
Подводя итоги проделанной работы, хочу сказать, что, несмотря на, многочисленные проблемы и общую сложность, создать жизнеспособный, и перспективный продукт получилось в полной мере. В общей сложности от этапа первых набросков до окончания работ прошло 3 месяца и затраченное оборудование и комплектующие оцениваются в 10 тыс. руб.
IV. Приложения
Видео с созданием и испытанием самолета https://vk.com/video499500246_456239670
https://youtu.be/XgV-dibU8CA
V.Список использованной литературы
Проектирование и расчет моделей планеров И.К. Костенко Издательство ДОСААФ 1958 г.
Малые беспилотные летательные аппараты. Теория и практика Биард Рэндал У., Мак Лэйн, Тимоти У. Издательство Техносфера 2016 г.
Беспилотные летательные аппараты как носители оборудования комплексных систем наблюдения Шеваль В.В. 2010 г.
http://www.airwar.ru/
https://rcopen.com/
https://ru.wikipedia.org
13








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

