Россия,


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 28.04.2026 16:28

Авхатова Юлия Евгеньевна
Учитель технологии
Местоположение
Технологическая карта урока "Каналы связи"
Категория:
Труд (технология)
18.04.2026 19:52

Просмотр содержимого документа
«Технологическая карта урока "Каналы связи"»
Конспект урока технологии для 7 класса на тему: «Каналы связи».
Труд (технология)
Урок 57
Введение.
На современном этапе технологического развития робототехника активно проникает в повседневную жизнь. Одним из основополагающих аспектов функционирования роботизированных систем является использование каналов связи. На этом уроке мы рассмотрим, как роботы обмениваются данными и командой, а также изучим каналы связи на базе платформы Arduino.
Цели урока:
Объяснить понятие каналов связи и их значимость в робототехнике.
Ознакомить учащихся с различными типами каналов связи, используемых в проектах на базе Arduino.
Научить учащихся реализовывать простую связь между модулями с использованием Arduino.
Задачи урока:
Обсудить и проанализировать различные виды связи: проводная (например, I2C, UART) и беспроводная (например, Wi-Fi, Bluetooth).
Провести демонстрацию работы модулей связи на примерах.
Организовать практическую часть, где учащиеся смогут создать небольшой проект, использующий каналы связи.
Ход урока.
Организационный момент (5 минут).
Приветствие учащихся.Проверка присутствия.Обсуждение домашнего задания (если было).
Пояснение новой темы (15 минут).
Во вводной части урока важно создать базу знаний об основах каналов связи и их значении в контексте робототехники и автоматизации. Начнем с определения ключевых терминов и их взаимосвязи.
Прежде всего, необходимо объяснить, что такое «канал связи». Мы можем рассматривать его как путь, по которому информация передается от одного устройства к другому. Каналы связи могут быть различными. В зависимости от используемой технологии они могут представлять собой проводные (например, Ethernet, сериальные соединения) или беспроводные (например, Wi-Fi, Bluetooth, радиочастоты) системы. Технически, канал связи – это не просто средство для передачи данных. Он включает в себя как физический аспект (провода, антенны), так и протоколы, обеспечивающие корректность и безопасность передачи информации.
Далее следует перейти к понятию «передача данных». Это процесс, в котором информация кодируется в определённом формате, чтобы ее можно было передать по каналу связи. В контексте робототехники передача данных может происходить как между роботами, так и между роботами и внешними системами (например, датчиками, компьютерными программами или другими устройствами). Важно указать, что успешная передача данных является критическим элементом функционирования многих современных технологий, так как она позволяет роботам и устройствам обмениваться информацией и принимать решения на основе полученных данных.
При обсуждении значения каналов связи в роботах и системах автоматизации, нужно отметить, что эффективная коммуникация между устройствами является основополагающим аспектом для создания интерактивных, высокоэффективных и автономных систем. Например, представьте себе умный дом, где датчики движения взаимодействуют с системами освещения: когда кто-то входит в комнату, датчик отправляет информацию о движении в систему управления, которая, в свою очередь, включает свет. Это позволяет достичь значительной экономии энергии и повысить уровень комфорта.
Другим примером может служить применение беспилотных автомобилей. Для безопасного и эффективного функционирования таких автомобилей необходимо, чтобы они обменивались данными как с другими автомобилями, так и с дорожными системами. Это происходит через каналы связи, которые позволяют передавать информацию о состоянии дорожного движения, препятствиях и других важных аспектах, что приводит к улучшению всей системы транспортировки.
Не менее значимы и промышленные роботы, которые применяются на заводах и фабриках. Сегодня, с внедрением Интернета вещей, такие машины могут общаться друг с другом, передавая данные о производственных процессах, а также мониторить состояние оборудования в режиме реального времени. Это помогает оптимизировать производственные процессы, прогнозировать поломки и минимизировать время простоя.
В завершение вводной части урока, можно подчеркнуть, что понимание основ взаимодействия и передачи данных между роботами и их окружением не только углубляет знание учащихся о технологиях, которые они изучают, но и открывает двери для обсуждения будущих инноваций в этой быстро развивающейся области.
Организация связи между модулями на базе Arduino является ключевым элементом в разработке развивающихся проектов. Разнообразие типов каналов связи позволяет создавать различные системы, которые могут обмениваться данными и выполнять задачи вне зависимости от расстояния между компонентами. В ходе нашего занятия мы ознакомим учащихся с несколькими основными типами каналов связи, а также проведём демонстрацию реализации этих связей через простые примеры.
Типы каналов связи.
С проводным соединением.
Проводная связь – один из самых простых и надёжных способов обмена данными. В проектах на базе Arduino используются такие стандартные протоколы, как I2C и SPI.
I2C (Inter-IntegratedCircuit). Этот протокол позволяет подключать несколько устройств к одной шине, используя всего два провода: SDA (данные) и SCL (тактовый сигнал). I2C позволяет взаимодействовать с множеством модулей, таких как датчики, дисплеи и другие микроконтроллеры, при этом каждое устройство имеет уникальный адрес.
SPI (SerialPeripheralInterface). SPI также предназначен для соединения нескольких устройств, но использует больше проводов: два для передачи данных (MOSI - MasterOutSlaveIn и MISO - MasterInSlaveOut), один для тактового сигнала (SCK) и один для выбора устройства (CS - ChipSelect). Этот метод обеспечивает более высокую скорость передачи данных по сравнению с I2C и чаще используется в более требовательных проектах.
Беспроводные соединения.
Беспроводные технологии позволяют соединять устройства на расстоянии, что открывает новые горизонты для креативных проектов.
Bluetooth. Этот стандарт беспроводной связи позволяет устройствам обмениваться данными на коротком расстоянии. Например, с помощью модуля HC-05 можно соединить Arduino с мобильными телефонами или другими устройствами.
Wi-Fi. Модули, такие как ESP8266 или ESP32, позволяют подключать Arduino к сети Wi-Fi, что даёт возможность осуществлять обмен данными через интернет. Это полезно для разработки IoT-приложений, где устройство может управляться удалённо.
RF (радиочастотная связь). Модули, такие как nRF24L01, обеспечивают беспроводную связь на базе радиоволн и позволяют передавать данные на расстоянии до 1 километра.
Оптические каналы. Они используют световые волны для передачи данных (например, инфракрасные датчики). Обеспечивают высокую скорость передачи, но ограничены в диапазоне.
Каждый из этих типов каналов имеет свои особенности, включая максимальную скорость передачи данных, расстояние действия, восприимчивость к помехам и стоимость реализации.
Демонстрация связи между модулями.
Теперь, когда мы ознакомились с основными типами каналов связи, давайте перейдём к практической части – реализации связи между модулями с использованием Arduino.
Пример 1. Соединение через I2C.
В этом примере мы осуществим связь между двумя Arduino – основным и вспомогательным. На основном Arduino будет находиться мастер (Master), который запрашивает данные у_slave (Slave) устройства.
Обязанности устройства Slave.
Используя датчик, например, LM35 для измерения температуры, Arduino будет отправлять данные об температуре.
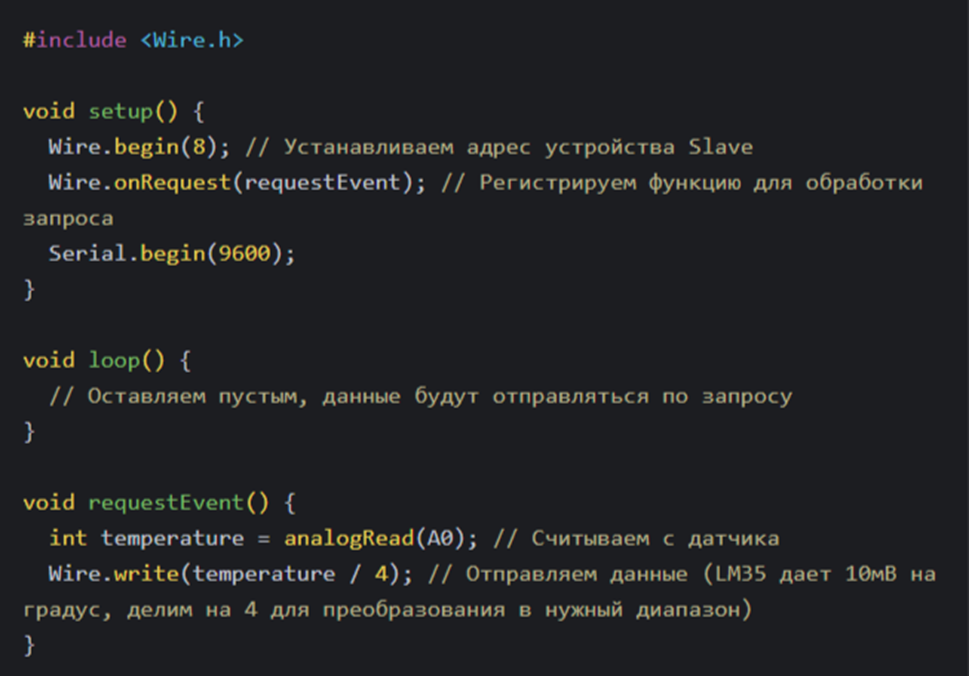
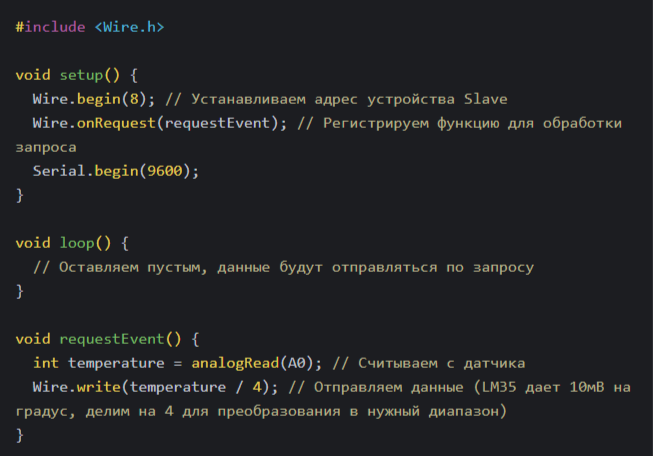 Код для устройства Slave:
Код для устройства Slave:
Код для устройства Master:
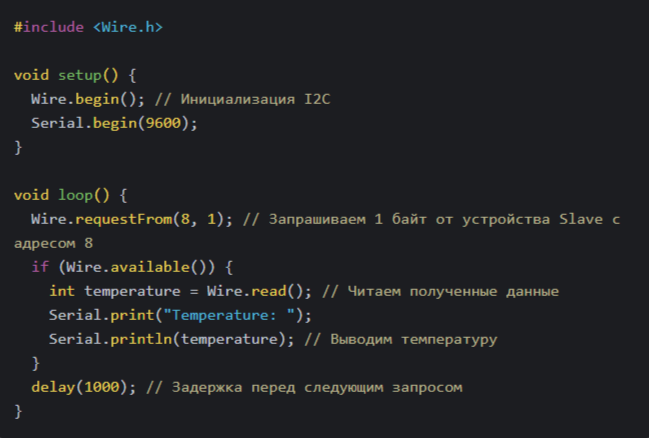
Этот код позволяет Master считать данные с датчика, подключенного к Slave. Таблица подключения аналоговых выводов поможет учащимся правильно соединить модули.
Пример 2. Беспроводная связь с использованием Bluetooth.
В этом примере мы подключим модуль HC-05 к Arduino и настроим его для обмена данными с мобильным устройством.
Схема подключения:
HC-05 VCC к 5V Arduino
GND к GND
TX к RX (пин 10)
RX к TX (пин 11)
Код для Arduino с Bluetooth:
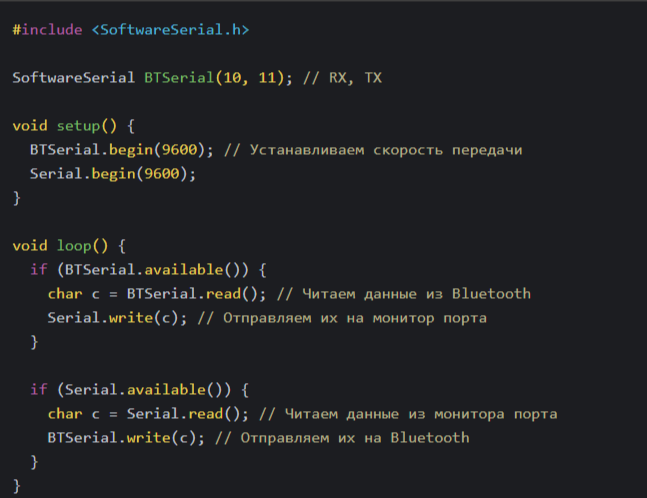
После загрузки кода учащиеся смогут отправлять и получать данные через Bluetooth с помощью приложения на смартфоне, например, ArduinoBluetoothController.
Функциональность каналов связи.
Каналы связи выполняют множество функций:
Передача данных: обеспечивает передачу информации между компонентами робота, например, сенсорами и контроллерами.
Управление: позволяет пользователям контролировать робота и отправлять ему команды через интерфейсы (например, мобильное приложение или компьютер).
Мониторинг состояния: считывает информацию о состоянии систем робота (например, уровень заряда батарей, данные с сенсоров).
Связь между роботами: в некоторых системах необходима связь между несколькими роботами для совместной работы или координации действий.
Преимущества и недостатки.
Каждый тип канала связи имеет свои преимущества и недостатки.
Проводные каналы:
Плюсы: высокая стабильность и безопасность, нет помех от внешних источников, высокая скорость передачи данных.
Минусы: ограниченная мобильность, сложность в соединении на больших расстояниях, необходимость в физическом подключении.
Беспроводные каналы:
Плюсы: высокая мобильность, возможность передачи данных на большие расстояния, гибкость в установке.
Минусы: подверженность помехам, возможные проблемы с безопасностью передачи данных, ограничения по диапазону действия.
Оптические каналы:
Плюсы: высокая скорость передачи, невосприимчивость к электромагнитным помехам.
Минусы: ограниченный диапазон действия, необходимость в прямой видимости.
Область применения в реальном мире.
Каналы связи в робототехнике находят широкое применение в различных областях:
Промышленная автоматизация: роботы, используемые для автоматизации производственных процессов, обмениваются данными с управляющими системами в реальном времени.
Медицинская робототехника: хирургические роботы используют надежные проводные каналы для передачи данных между сенсорами и управляющими компьютерами.
Системы беспилотного управления: дроны и беспилотные наземные транспортные средства полагаются на беспроводные каналы (например, Wi-Fi или радиосигналы) для управления и передачи данных о состоянии систем.
Умные дома: в экосистемах интеллектуальных домов используются беспроводные протоколы для связи между датчиками, исполнительными механизмами и центральным контроллером.
Военные и спасательные операции: применяются высоко адаптируемые беспроводные системы связи для координации действий роботов в сложных условиях.
Таким образом, каналы связи в робототехнике являются критически важной составляющей, обеспечивающей эффективную работу различных систем и компонентов. Выбор оптимального канала связи определяет эффективность, надежность и безопасность работы роботов в различных условиях.
Практическая занятие (15 минут).
Организация практической работы по передаче сообщений между устройствами Arduino с использованием модуля Bluetooth может оказаться увлекательным и познавательным опытом для учащихся.
1. Подготовка.
Разделение на группы.Учитель делит класс на небольшие группы по 3-4 человека. Это позволит учащимся эффективно взаимодействовать друг с другом и делиться идеями.
Раздача комплектов.Каждой группе передается комплект оборудования, включающий:
2 модуля Arduino (например, ArduinoUno или Nano).
2 модуля Bluetooth (например, HC-05 или HC-06).
Датчики (например, кнопки) и светодиоды для визуализации передачи данных.
Провода для соединения компонентов.
Макетные платы и другие необходимые аксессуары.
2. Введение в проект.
Объяснение задания.Учитель объясняет цель проектной работы: создать программу, которая будет передавать текстовое сообщение с одного устройства Arduino на другое с помощью Bluetooth.
Рассказать о модулях Bluetooth и их принципе работы, объясняя, что они позволяют обмениваться данными между устройствами без проводов.
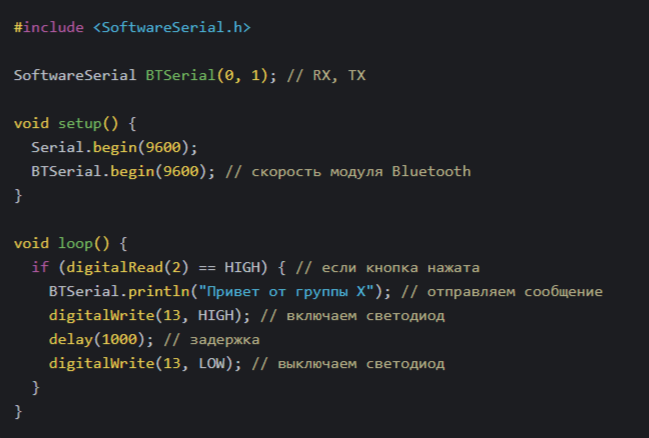
Примеры.Предложить несколько примеров сообщений, которые можно отправлять (например, «Привет», «Сообщение от группы X»).
3. Подключение компонентов.
Схема подключения. Подключите модули Bluetooth к Arduino, следуя следующей схеме:
HC-05 VCCк 5VArduino.
HC-05 GNDкGNDArduino.
HC-05 TX к RX на Arduino (например, к цифровому пину 0).
HC-05 RX к TX на Arduino (например, к цифровому пину 1).
Подключение дополнительных компонентов. Для большей наглядности можно подключить кнопку (для отправки сообщения) и светодиод (для отображения состояния):
Кнопка: один контакт к цифровому пину (например, 2), другой - к GND.
Светодиод: анод к цифровому пину (например, 13), катод к GND через резистор.
4. Написание программы.
Объяснение кода. Учитель демонстрирует код для отправки сообщений по Bluetooth. Вот пример кода для отправителя:
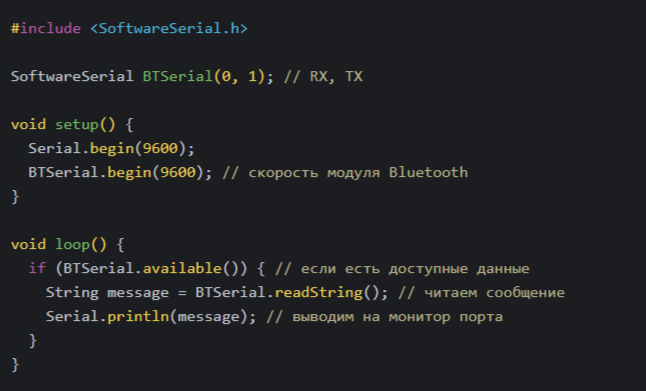
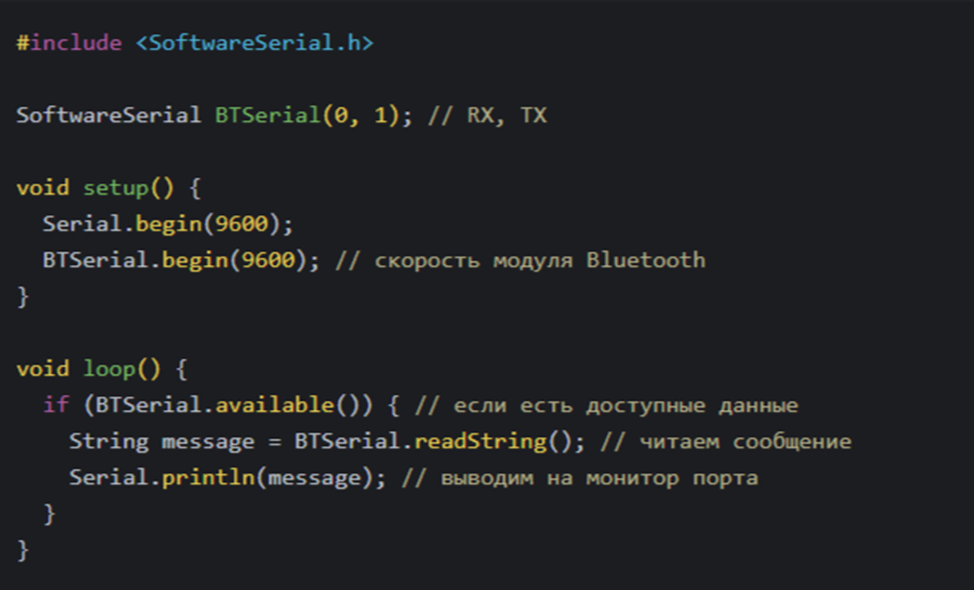
Для принимающего устройства можно использовать следующий код:
5. Тестирование и отладка.
Настройка и загрузка кода. Каждая группа загружает программу на свои устройства Arduino.Убедитесь, что устройства правильно подключены, и проверяйте наличие ошибок при загрузке.
Тестирование передачи.После загрузки кода группы должны протестировать передачу сообщений, нажимая кнопку на одном устройстве и наблюдая за выводом на другом устройстве.
6. Заключение.
Обсуждение результатов.Попросите группы поделиться своими наблюдениями и выводами о работе модуля Bluetooth, о том, как они смогли выполнить задачу, и о любых вызовах, с которыми они столкнулись.
Итог.Подчеркните важность взаимодействия и работы в команде, а также возможность использования технологий Bluetooth в различных проектах, включая IoT-устройства. Это может стать основой для более сложных проектов в будущем.
Эта подробная инструкция даст учащимся четкие указания по созданию проекта и обеспечит им возможность изучить принципы работы с Arduino и Bluetooth.
Домашнее задание.
Написать небольшое эссе на тему «Будущее каналов связи в робототехнике», в котором рассмотреть возможные развития технологий и их влияние на жизнь человека.
Подготовить презентацию к следующему уроку, где будет представлено ваше понимание важности коммуникации между роботами и местами их применения.
Практическая работа по технологии для 7 класса на тему «Программирование дополнительных механизмов».
Труд (технология)
Урок 58
Вариант 1
Цели работы.
Ознакомление с основами программирования и управления дополнительными механизмами на платформе Arduino.
Изучение возможностей подключения и управления сервомотором.
Развитие навыков работы в команде и творческого подхода к решению проблем.
Оборудование:
Платформа Arduino (Uno или аналог).
Серво-привод (сервомотор).
Датчик расстояния (например, HC-SR04).
Breadboard (макетная плата) и провода.
Компьютеры с установленной средой Arduino IDE.
Батарейки или блок питания для Arduino.
Структура работы:
Введение.Объясните учащимся, что они будут работать с сервомотором и датчиком расстояния. Расскажите о принципах работы сервомоторов и их использовании в робототехнике, например, для управления движением или захватом предметов.
Подключение компонентов.Учащиеся должны подключить сервомотор и датчик расстояния к Arduino согласно следующей схеме:
Сервомотор:
Красный провод (питание) к 5V на Arduino.
Коричневый провод (земля) к GND на Arduino.
Желтый или оранжевый провод (управление) к цифровому пину (например, 9).
Датчик расстояния:
VCC к 5V.
GND к GND.
Trig к цифровому пину (например, 10).
Echo к цифровому пину (например, 11).
Кодирование.Попросите учащихся открыть Arduino IDE и написать следующую программу, которая будет использовать сервомотор в зависимости от расстояния, измеренного датчиком.
П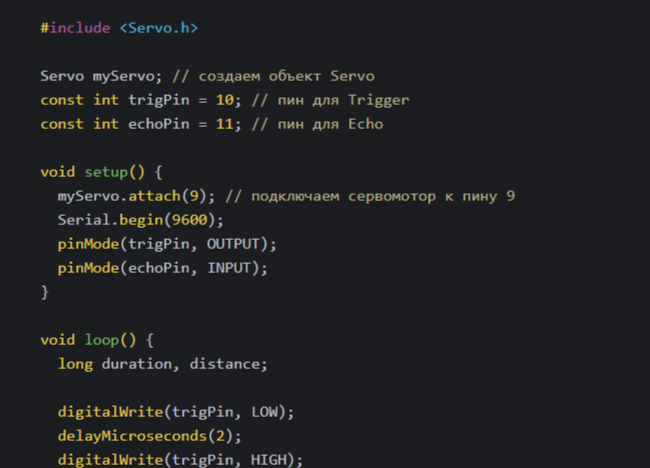 ример кода:
ример кода:
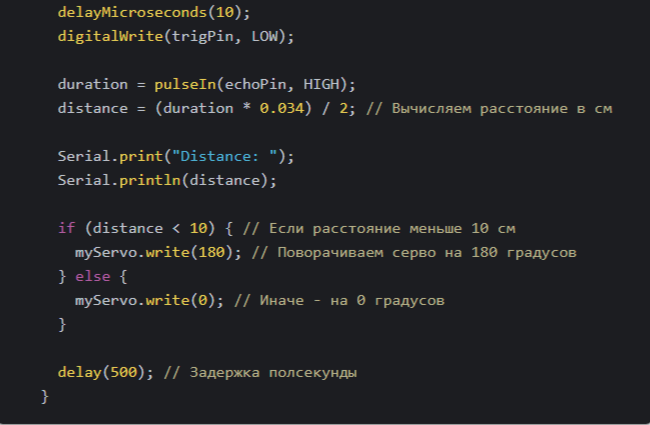
Давайте разберем, как работает код, который измеряет расстояние и управляет сервомотором в зависимости от положения объекта.
Основная цель этого кода заключается в том, чтобы использовать ультразвуковой датчик для измерения расстояния до объекта и затем управлять движением сервомотора в зависимости от этого расстояния. Принцип работы заключается в том, что ультразвуковой датчик посылает звуковые импульсы и фиксирует время, за которое импульс возвращается обратно после отражения от объекта. Из этого времени мы можем вычислить расстояние до объекта, используя простую физическую формулу.
Когда код запускается, он сначала инициализирует необходимые библиотеки и объявляет используемые пины для подключения датчика и сервомотора. Датчик отправляет ультразвуковые импульсы, которые отражаются от ближайшего объекта, и возвращаются обратно к датчику. В коде используется функция, которая запускает передатчик на фиксированное время, а затем «слушает» ответ. На основе времени, потраченного звуковым импульсом на путь туда и обратно, мы вычисляем расстояние.
Это делается по формуле: расстояние = (время * скорость звука) / 2. Поскольку скорость звука в воздухе примерно равна 343 метра в секунду, мы можем использовать её для вычисления расстояния в сантиметрах.
После вычисления расстояния категория «if» проверяет, находится ли объект ближе 10 см. Если это так, программный код отправляет сигнал, который поворачивает сервомотор на 180 градусов, что может означать, что он находится в активном состоянии, привлекая внимание к объекту. Если расстояние больше 10 см, сервомотор возвращается в исходное положение на 0 градусов. Задержка в 500 миллисекунд между измерениями помогает избежать слишком частого обновления значений, позволяя системе стабильно реагировать на изменения в окружающей среде.
Тестирование.Теперь о тестировании. После того как код был написан и загружен на плату Arduino, каждая группа должна протестировать свой проект. Важно обеспечить, чтобы сервомотор правильно реагировал на изменения в расстоянии, измеряемом ультразвуковым датчиком. Для этого учащиеся могут подносить различные объекты к датчику и наблюдать, как сервомотор меняет своё положение в ответ на изменения расстояния. Это практическое испытание не только проверяет функциональность кода, но и помогает учащимся увидеть технологию в действии.
Обсуждение и рефлексия.Обсуждение и рефлексия — это важные этапы работы. Можно предложить учащимся поделиться тем, что у них получилось реализовать, а также с какими трудностями они столкнулись. Например, возможно, кто-то столкнулся с проблемами подключения проводов, или у них возникали сложности с программированием. Этот обмен опытом помогает каждому глубже понять свои ошибки и успехи. Далее стоит обсудить, как они могут применять полученные знания в будущем. Например, умение работать с сенсорами и сервомоторами может быть применено при создании роботов или автоматизированных систем управления.
Также нельзя забывать про возможности улучшения проекта. Учащиеся могут задуматься, как можно изменить функции сервомотора. К примеру, вместо поворота на 180 градусов, можно запрограммировать плавное перемещение или изменение скорости вращения в зависимости от расстояния. Или они могут рассмотреть возможность подключения других типов датчиков, таких как инфракрасный, чтобы увеличить функциональность устройства.
Заключение.
Можно подчеркнуть значимость программирования в области робототехники и те возможности, которые оно открывает для создания интерактивных и автономных систем. Сегодняшнее занятие прекрасно иллюстрирует, как программирование не только вооружает нас техническими навыками, но и позволяет создавать проекты, которые могут быть применены в реальных приложениях, таких как умные дома и автоматизированные производственные линии. Это помогает подготовить учеников к будущей карьере в быстро развивающемся мире технологий.
Тест по технологии на тему «Каналы связи».
1. Какой тип связи используется для передачи данных на большие расстояния без проводов?
a) Проводная связь.
b) Радиосвязь.
c) Оптоволокно.
d) Инфракрасная связь.
2. Какой из приведенных ниже каналов связи является наиболее устойчивым к помехам?
a) Радиоволновый.
b) Инфракрасный.
c) Оптоволоконный.
d) Электромагнитный.
3. Что представляет собой протокол передачи данных?
a) Стандарт на качество кабеля.
b) Набор правил для обмена информацией.
c) Устройство маршрутизации.
d) Способ кодирования данных.
4. Какой из следующих алгоритмов используется для обеспечения надежности передачи данных?
a) Декодирование.
b) Шифрование.
c) Контроль ошибок.
d) Нормализация.
5. В каком случае применяется беспроводная связь в робототехнике?
a) Для передачи данных между компонентами в пределах одного устройства.
b) При необходимости удаленного управления роботом.
c) Для подключения к локальной сети.
d) Для передачи электрического тока.
6. Какой стандарт связи чаще всего используется в беспроводных сенсорных сетях?
a) HDMI.
b) Bluetooth.
c) UART.
d) USB.
7. Какой из перечисленных протоколов подходит для передачи данных в реальном времени?
a) TCP.
b) UDP.
c) FTP.
d) HTTP.
8. Какое устройство служит для преобразования аналогового сигнала в цифровой?
a) Цифровой интегратор.
b) Аналогово-цифровой преобразователь.
c) Цифровой фильтр.
d) Аналоговый резистор.
9. Какой из следующих факторов влияет на эффективность беспроводной передачи данных?
a) Длина провода.
b) Мощность передатчика.
c) Цвет устройства.
d) Размер антенны.
10. Чем является задержка в канале связи?
a) Временем, необходимым для передачи сигнала.
b) Периодом ожидания между сигналами.
c) Временным промежутком, после которого сигнал достигает приемника.
d) Скоростью передачи данных.
11. Какой тип связи наиболее подходит для передачи больших объемов данных?
a) Витая пара.
b) Радиочастотная связь.
c) Оптоволоконная связь.
d) Инфракрасная связь.
12. Какое устройство может использоваться для увеличения дальности беспроводной связи?
a) Повторитель.
b) Модем.
c) Фильтр.
d) Преобразователь.
13. Какой компонент обычно используется для подключения робота к домашней сети?
a) Ардуино.
b) Raspberry Pi.
c) Облачный сервер.
d) Адаптер Wi-Fi.
14. Какой вид связи используется для взаимодействия между различными модулями робота?
a) Параллельный интерфейс.
b) Последовательный интерфейс.
c) Аудиосигнал.
d) Радиоволны.
15. В чем заключается основное преимущество использования оптоволоконных кабелей?
a) Низкая стоимость.
b) Высокая скорость передачи и защитаот электромагнитных помех.
c) Гибкость.
d) Простота установки.
Ответы
1. b) Радиосвязь
2. c) Оптоволоконный
3. b) Набор правил для обмена информацией
4. c) Контроль ошибок
5. b) При необходимости удаленного управления роботом
6. b) Bluetooth
7. b) UDP
8. b) Аналогово-цифровой преобразователь
9. b) Мощность передатчика
10. c) Временным промежутком, после которого сигнал достигает приемника
11. c) Оптоволоконная связь
12. a) Повторитель
13. d) Адаптер Wi-Fi
14. b) Последовательный интерфейс
15. b) Высокая скорость передачи и защита от электромагнитных помех.








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

