







© 2021, Кублик Ольга Владимировна 235 0


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 21.11.2023 22:14

Кублик Ольга Владимировна
Специализация
Типовые механизмы машин. Общие сведения о деталях и механизмах машин.
Категория:
Прочее
15.11.2021 00:39

Просмотр содержимого документа
«Типовые механизмы машин. Общие сведения о деталях и механизмах машин.»
Опорный конспект урока
Тема урока: Типовые механизмы машин. Общие сведения о деталях и механизмах машин.
Всякая машина состоит из отдельных деталей, соединенных в определенной последовательности.
Деталь- это изделие, изготовленное из материала одного наименования и марки без применения сборочных операций (например, литой корпус машины, коробка, склеенная из одного куска картона, и т. д.).
В технике применяют различные виды соединения деталей. Классификация видов соединений проводится по следующим основным признакам: подвижность отдельных частей, целостность соединения, форма сопрягаемых поверхностей и метод образования соединений.
Подвижность частей соединения характеризует возможность их относительного перемещения. По этому признаку соединения делят на подвижные и неподвижные.
Целостность соединения характеризует его состояние при разборке. По этому признаку соединения могут быть разъемными и неразъемными. Разъемными соединениями называют такие, которые разбирают без нарушения целостности частей изделия. При разборке неразъемных соединений целостность частей изделия нарушается.
Метод образования соединения характеризует их конструктивные и технологические особенности при сборке частей изделия. По указанному признаку соединения делят на резьбовые, клиновые, шпоночные, шлицевые, штифтовые, шплинтовые, клепаные, шарнирные, прессовые, сварные, клееные, гвоздевые, сшивные .
Подвижное соединение двух деталей называется кинематической парой, последовательная система нескольких кинематических пар - кинематической цепью.
Неподвижные соединения исключают возможность относительного перемещения соединяемых деталей и в свою очередь могут быть неразъемными или разъемными.
Неразъемные соединения не подлежат разборке без разрушения соединяемых или крепежных деталей. Неразъемными являются заклепочные, сварные, паяные, клееные и прессовые соединения.
Типовые механизмы обувных машин.
В современной технике используют разнообразные механизмы, в обувных машинах чаще всего — рычажные и кулачковые.
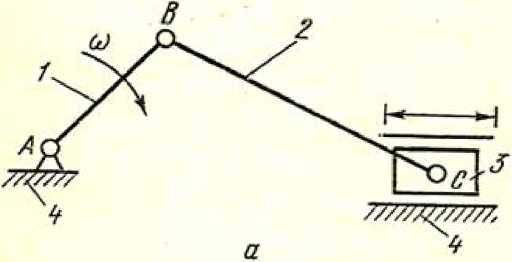
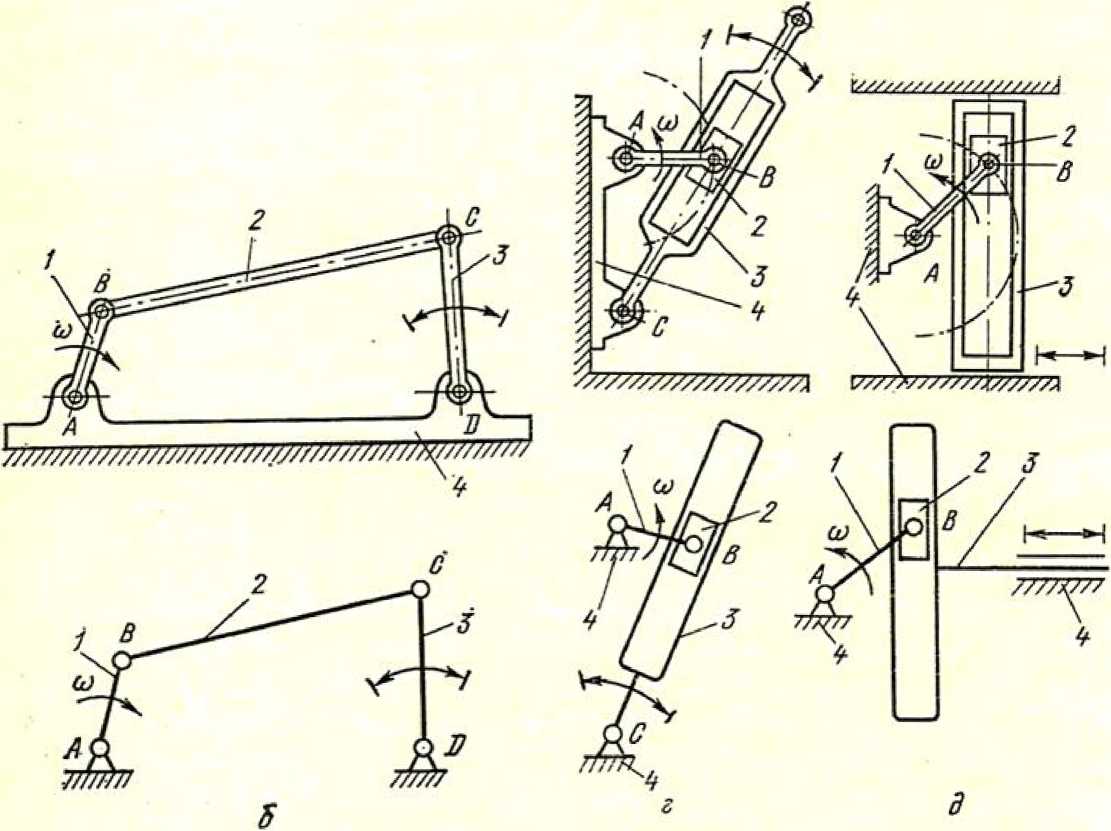
Кривошипно-ползунный механизм (рис. 3, а) преобразует вращательное движение в возвратно-поступательное. Механизм состоит из последовательно соединенных подвижных звеньев — кривошипа /, шатуна 2 и ползуна 3, а также неподвижного звена — стойки 4.
Кривошипом называют звено, совершающее полный оборот вокруг неподвижной оси.
Шатун-звено, образующее вращательные кинематические пары с подвижными звеньями и не связанное со стойкой. Ползун - звено, совершающее возвратно-поступательное движение в неподвижных направляющих. Кривошип , вращаясь вокруг оси А, сообщает ползуну 3 через шатун 2 возвратно-поступательное движение в направляющих стойки 4, Шатун 2 образует с кривошипом и ползуном 3 вращательные кинематические пары в точках В и С. Ведущим звеном механизма является кривошип.
Характер движения ведомого звена также обозначают стрелкой.
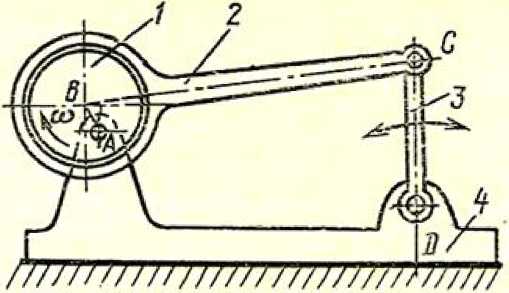
Кривошипно-коромысловый механизм (рис. 3, б) преобразует вращательное движение в карательное. Механизм состоит из кривошипа Л шатуна 2, коромысла 3 — звена, совершающего карательное движение вокруг неподвижной оси, и стойки 4. Вращаясь вокруг оси А, кривошип 1 сообщает коромыслу 3 карательное движение вокруг оси Р.
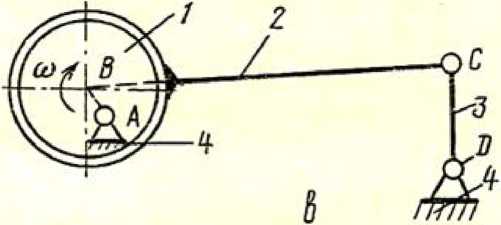
В любом из указанных механизмов кривошип может быть заменен эксцентриком, имеющим аналогичное назначение. Эксцентрик — это звено круглой цилиндрической формы, ось вращения которого не совпадает с геометрической осью. При работе подобного механизма вращение эксцентрика 1 (рис. 3, в) вокруг оси А стойки 4 преобразуется через шатун 2 в карательное движение коромысла 3 вокруг оси Р. Расстояние между осью вращения А и геометрической осью В эксцентрика называется эксцентриситетом.
Кривошипно-кулисные механизмы преобразуют вращательное движение в качательное вокруг оси С (рис. 3, а) или возвратно-поступательное (рис. 3, д). Каждый механизм состоит из подвижных звеньев—кривошипа /, кулисного камня 2, кулисы 3 и стойки 4,
Кулисный камень - звено, совершающее возвратно- поступательное движение в подвижной направляющей. Кулисой называется подвижная направляющая. Кулиса может иметь как прямолинейный, так и криволинейный паз.
В машинах большое число звеньев совершает одинаковые по характеру движения. Не всегда целесообразно называть их одним термином (например, коромысло). Часто используют такие термины, как рычаг, серьга, толкатель и др.
Широко распространены в обувных машинах кулачковые механизмы, передающие ведомым звеньям разнообразные движения. Обычно они преобразуют вращательное движение кулачка в периодические движения рабочих органов машины. Особенностью кулачковых механизмов является возможность получения практически любых движений, в том числе и движений с остановами ведомого звена заданной продолжительности.
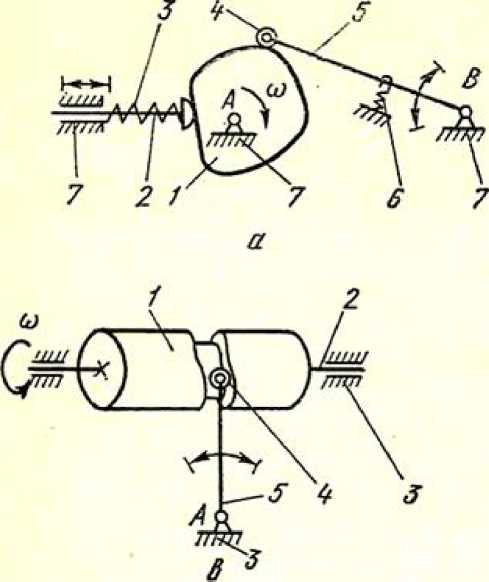
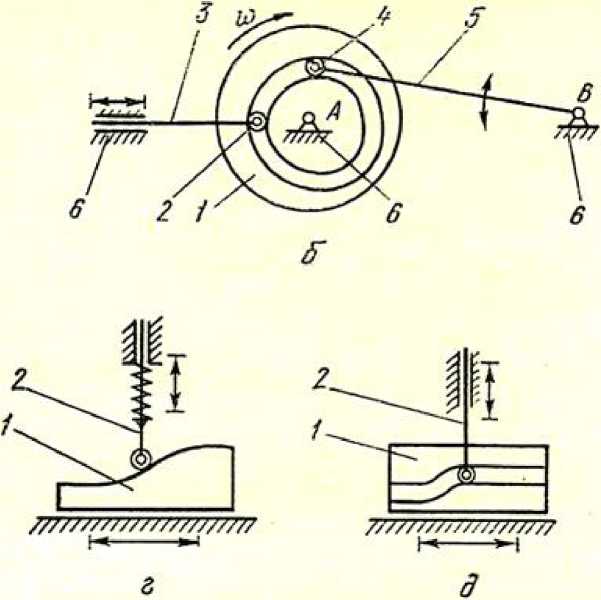
Кулачковый механизм (рис. 4, а) с плоским дисковым кулачком состоит из кулачка 1, являющегося ведущим звеном, и двух ведомых звеньев — толкателя 2 и рычага 5. На конце рычага 5 расположен ролик 4, служащий для уменьшения трения и не влияющий на характер движения рычага 5. Пружины 3 и 6 служат для прижатия соответственно толкателя 2 и рычага 5 с роликом 4 к кулачку /.
При вращении кулачка 1 вокруг оси А толкатель 2 будет двигаться вправо и влево в направляющих стойки7, а рычаг 5- качаться вокруг оси В, причем движения толкателю 2влево и рычагу 5 вверх будут передаваться от кулачка У, а обратно — от пружин 3 и 6. Характер движения толкателя 2 и рычага 5 зависит от профиля кулачка 1, Оси А и Б расположены в стойке 7.
В пазу (канавке) механизма с дисковым пазовым кулачком 1 (рис. 4, б) расположены ролики 2 и 4, закрепленные соответственно на концах толкателя 3 и рычага 5. При вращении кулачка 1 вокруг оси А толкатель 3 перемещается вправо и влево в направляющих стойки 6, а рычаг 5 качается вокруг оси В. Все движения передаются от паза кулачка 1, поэтому отпадает необходимость в пружинах.
Барабанный пазовый кулачок 1 (рис. 4, в) закреплен на валу 2, установленном в опорах стойки 3. В паз кулачка 1 вставлен ролик 4, закрепленный на конце рычага 5. При вращении кулачка / рычаг 5 совершает качательные движения вокруг оси А, расположенной в стойке 3.
На рис. 4, г и д изображены кулачковые механизмы, которые преобразуют горизонтальное возвратно-поступательное движение плоских кулачков 1 в вертикальные перемещения толкателей 2.
Домашнее задание: Прочитать текст, составить конспект, зарисовать механизмы.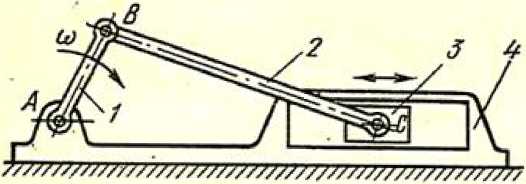
Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

