
Российская Федерация, с Сайылык


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 20.03.2026 15:47

Саввинов Анатолий Петрович
Учитель химии
38 лет
Местоположение
Специализация
Введение в квадрокоптеры
Категория:
Прочее
24.01.2026 15:04

Просмотр содержимого документа
«Введение в квадрокоптеры»
Устройство квадрокоптера
Что такое квадрокоптер
- Квадрокоптером называют беспилотный летательный аппарат (сокращенно БПЛА) с четырьмя винтами, расположенными по углам аппарата — она же Х-образная геометрия.
- Пилотирование квадрокоптера осуществляется с помощью радиоуправления посредством пульта и смартфона. Предусмотрен также режим автопилота. Практически все квадрокоптеры имеют камеры для записи видео и трансляции в реальном времени.

Устройство квадрокоптера
Современный дрон состоит из множества высокотехнологичных компонентов, которые должны слаженно работать друг с другом. Основой любого аппарата являются следующие компоненты:
- силовая рама;
- двигатели и винты;
- системы управления и навигации;
- устройство управления;
- электронные компоненты.

Силовая рама
- Силовая рама является основным элементом квадрокоптера: на нее устанавливается основное и дополнительное оборудование. Она также обеспечивает защиту моторов и наиболее важных комплектующих.
- Рама состоит из двух основных элементов: фюзеляж и лучи. На фюзеляже размещается вся необходимая электроника: система управления и навигации, камера. На лучах размещаются моторы с контроллерами.
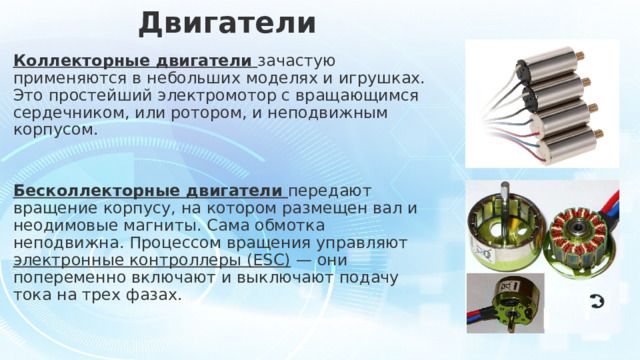
Двигатели
Коллекторные двигатели зачастую применяются в небольших моделях и игрушках. Это простейший электромотор с вращающимся сердечником, или ротором, и неподвижным корпусом.
Бесколлекторные двигатели передают вращение корпусу, на котором размещен вал и неодимовые магниты. Сама обмотка неподвижна. Процессом вращения управляют электронные контроллеры (ESС) — они попеременно включают и выключают подачу тока на трех фазах.
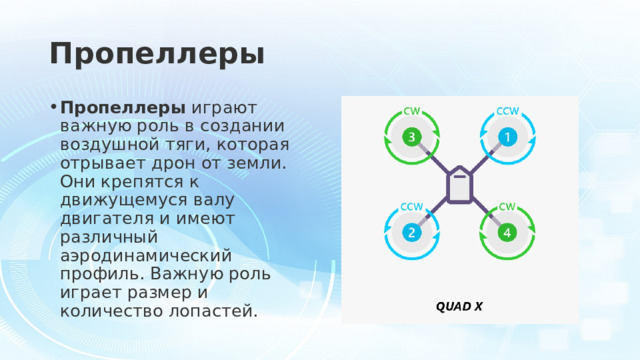
Пропеллеры
- Пропеллеры играют важную роль в создании воздушной тяги, которая отрывает дрон от земли. Они крепятся к движущемуся валу двигателя и имеют различный аэродинамический профиль. Важную роль играет размер и количество лопастей.
Пропеллеры
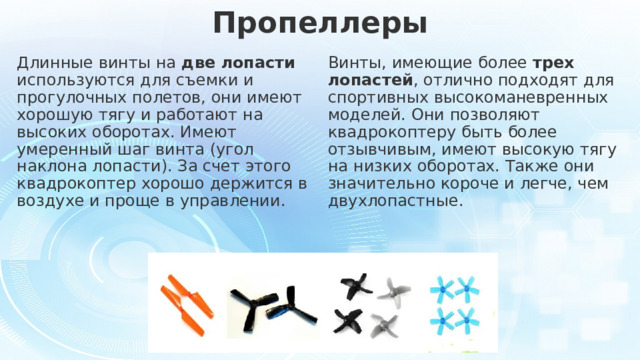
Длинные винты на две лопасти используются для съемки и прогулочных полетов, они имеют хорошую тягу и работают на высоких оборотах. Имеют умеренный шаг винта (угол наклона лопасти). За счет этого квадрокоптер хорошо держится в воздухе и проще в управлении.
Винты, имеющие более трех лопастей , отлично подходят для спортивных высокоманевренных моделей. Они позволяют квадрокоптеру быть более отзывчивым, имеют высокую тягу на низких оборотах. Также они значительно короче и легче, чем двухлопастные.

Электронные регуляторы скорости
Электронные регуляторы скорости, они же ESC (electronic speed controller) , контролируют передачу тока от батареи к двигателю, преобразуя постоянный ток в переменный на основании полученной от полетного контроллера информации.

Полетный контроллер
Этот контроллер — главное устройство управления полетом. Представляет из себя микрокомпьютер с возможностью подключения различных модулей: датчиков, устройств связи и ESC. Основой служит процессор, который производит необходимые расчеты.
Полетный контроллер
Процессор получает информацию от следующих датчиков:
- акселерометр — измеряет ускорение в любом направлении;
- гироскоп — измеряет вращение;
- барометр — измеряет высоту;
- магнитометр — корректирует информацию, полученную с акселерометра и гироскопа, так как фиксирует перемещение дрона относительно магнитного поля земли;
- GPS-приемник — необходим для возврата дрона в точку взлета, а также ограничивает возможность полета над запрещенными объектами.

Пульт управления
Для выполнения команд пилота к полетному контроллеру подключается радиоприемник. Он, в свою очередь, принимает сигналы от пульта управления и передает их на полетный контроллер.

Заряд аккумулятора
Количество спутников
Посадка
Фото/Видео
Домой
Карта
Галерея
Расстояние от радиопульта
Расстояние от места полета
Высота полета
Скорость полета
Скорость полета
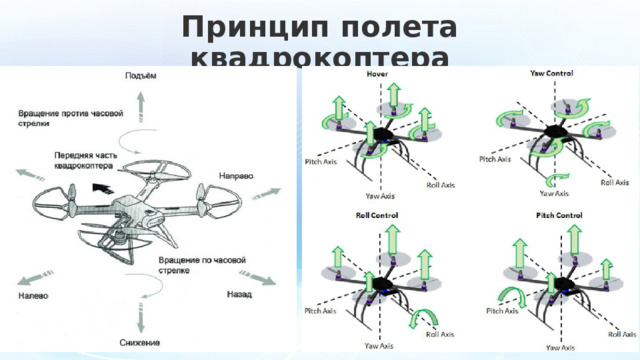
Принцип полета квадрокоптера







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

