
, ГПОУ "Читинский техникум отраслевых технологий и бизнеса", г. Чита, Забайкальский край


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 11.09.2025 06:43

Батуев Б. Н.
Преподаватель профмодуля
70 лет
Местоположение
Специализация
1 Основные понятия механики
Категория:
Прочее
06.09.2016 15:28

Просмотр содержимого документа
«1 Основные понятия механики»
- ГПОУ «Читинский техникум отраслевых технологий и бизнеса»
Презентация по технической механике
на тему «Основные понятия и аксиомы статики»
- Разработал: преподаватель Батуев Б. Н.
- Чита - 2015

I. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
- МЕХАНИКА — наука о механическом движении и взаимодействии материальных тел.
- Механическое движение — изменение с течением времени взаимного положения в пространстве материальных тел.

- ТЕОРЕТИЧЕСКАЯ МЕХАНИКА— наука о наиболее общих законах движения, взаимодействия материальных тел и равновесия твердых тел.
- Теор.мех. изучает наиболее общие законы механического взаимодействия и механического движения материальных тел. Базируется на законах классической механики, т.е. на законах Ньютона.
- Теор. мех. состоит: статика, кинематика, динамика.
- Статика изучает равновесное состояние тела, т.е. в состоянии покоя или прямолинейного равномерного движения.
- Тело абсолютно твердое – расстояние между любыми двумя точками всегда постоянно при действии других сил.
- Материальная точка – геометрическое тело, обладающее массой.
- Свободное тело – никакие другие тела не препятствуют его перемещению в любом направлении. На него не наложены связи.
- Несвободное тело – у него движение ограничено связью.
- В природе всегда – механическое взаимодействие тел.
![Сила [F] - мера взаимодействия тел , основная количественная мера механического воздействия одного тела на другое, характеризует его интенсивность и направление. Сила состоит из 3х составляющих: 1) модуль (числовое значение); 2) вектор (направление действия); 3) точка приложения. Линия силы – прямая линия, по которой направлен вектор силы.](https://fhd.multiurok.ru/1/1/d/11d05311c50b4bcb546effb09d6ba9b399223b87/img5.jpg)
- Сила [F] - мера взаимодействия тел , основная количественная мера механического воздействия одного тела на другое, характеризует его интенсивность и направление.
- Сила состоит из 3х составляющих:
- 1) модуль (числовое значение);
- 2) вектор (направление действия);
- 3) точка приложения.
- Линия силы – прямая линия, по которой направлен вектор силы.
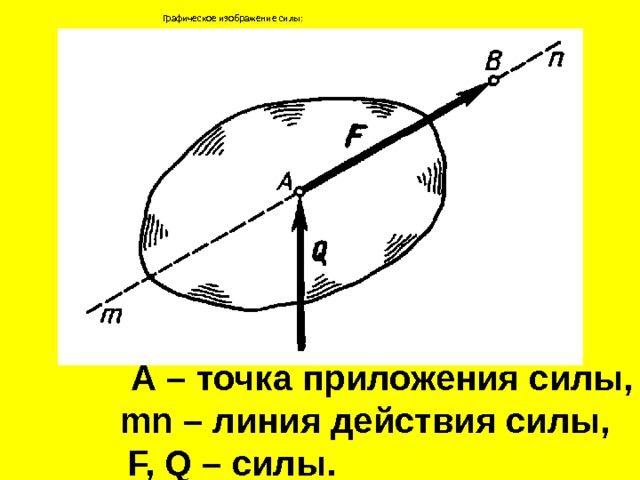
Графическое изображение силы:
А – точка приложения силы,
mn – линия действия силы,
F, Q – силы.
![В СИ – 1 Ньютон (1 Н) – сила, сооб-щающая телу массой 1 кг ускорение 1м/с² в направлении действия силы. 1 Н = 1кг ∙ 1м/с² = 1 кг∙м/ с² 1 кгс = 9,8 Н ≈10 Н. G = mg - сила тяжести, Н где m – масса тела, кг g =9,8м/с² – ускорение свободно-го падения. m = G/g [кг]](https://fhd.multiurok.ru/1/1/d/11d05311c50b4bcb546effb09d6ba9b399223b87/img7.jpg)
- В СИ – 1 Ньютон (1 Н) – сила, сооб-щающая телу массой 1 кг ускорение 1м/с² в направлении действия силы.
- 1 Н = 1кг ∙ 1м/с² = 1 кг∙м/ с²
- 1 кгс = 9,8 Н ≈10 Н.
- G = mg - сила тяжести, Н
- где m – масса тела, кг
- g =9,8м/с² – ускорение свободно-го падения.
- m = G/g [кг]

- Кратные единицы силы
10 = дека (д)
100 = 10² = гекто (г)
1000 = 10 3 = кило (к)
1000000 = 10 6 = мега (М)
- Дольные единицы силы
- 0,1 = 10 -1 = деци (д)
- 0,01 = 10 -2 = санти (с)
- 0,001 = 10 -3 = милли (м)
- 0,000001 = 10 -6 = микро (мк)

- Аксиомы статики
- I. Инерции ( 1-й закон Ньютона).
- Тело сохраняет состояние покоя или прямолинейного равномерного движения, пока какие-нибудь силы не выведут из этого состояния.
- На основании этой аксиомы состоянием равновесия считаем такое состояние, когда тело находится в покое или движется прямолинейно и равномерно, т. е. по инерции.

- II . Взаимодействия (3-й закон Ньютона) .
- Каждому действию есть проти-водействие, равное по модулю и противоположное по направлению.
- Из третьего закона Ньютона вытекает, что одностороннего механического действия одного тела на другое не существует, т. е. все силы природы — силы парные.
- Система сил - совокупность сил, при-ложенных к данному телу (телам).
- Если какая-нибудь система сил после приложения к свободному телу не изменяет его механическое состояние, то такая система сил называется уравновешенной.

- III. Условие равновесия двух сил
- Для равновесия тела, находящегося под действием двух сил, необходимо и достаточно, чтобы эти силы были равны по модулю и действовали по одной прямой в противоположные стороны.
- IV. Сохранение равновесия
- Равновесие твердого тела не нарушит-ся, если к нему приложить или удалить систему уравновешенных сил .
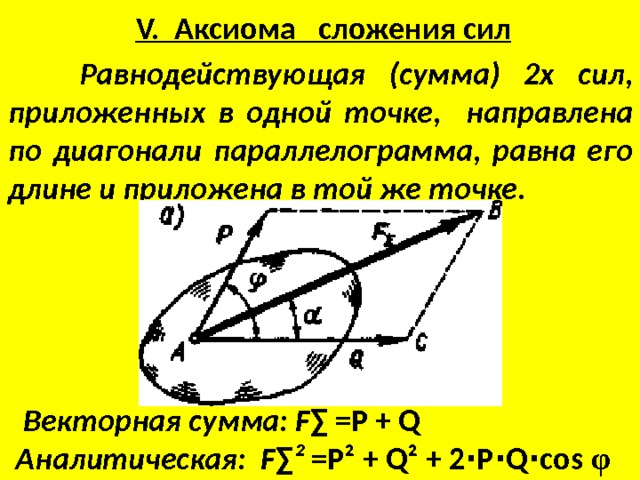
- V. Аксиома сложения сил
- Равнодействующая (сумма) 2х сил, приложенных в одной точке, направлена по диагонали параллелограмма, равна его длине и приложена в той же точке.
Векторная сумма: F ∑ =P + Q
Аналитическая: F ∑ ² =P² + Q² + 2∙P∙Q∙cos φ


- Частные случаи сложения двух сил:
- 1) φ = 0, тогда F ∑ = Р+Q.
- Равнодействующая двух сил, действующих по одной прямой в одну сторону, равна их сумме и направлена по той же прямой в ту же сторону;
- 2) φ =180°, тогда F ∑ = Р-Q.
- Равнодействующая двух сил, действующих по одной прямой в разные стороны, равна разности этих сил и направлена по той же прямой в сторону большей силы;
- 3) φ = 90°, F ∑ = √ Р²+Q².
- Равнодействующая двух сил, действующих под прямым углом, равна по величине диагонали прямоугольника, построенного на данных силах.
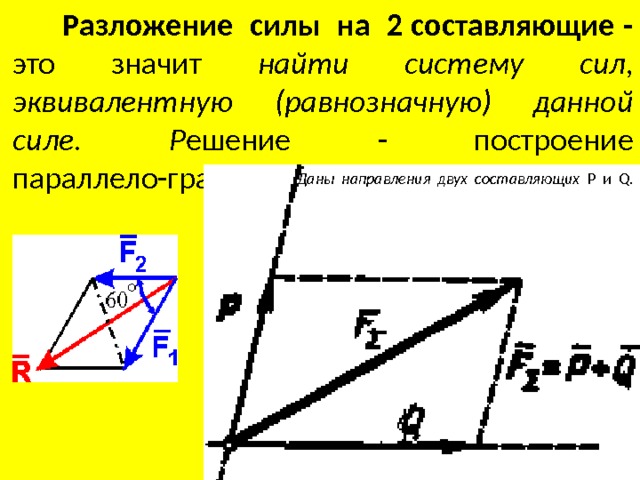
- Разложение силы на 2 составляющие - это значит найти систему сил, эквивалентную (равнозначную) данной силе. Р ешение - построение параллело-грамма сил.
Даны направления двух составляющих Р и Q.
 F ∑ и Р—Q F ∑ . Не имеет решений, если Р+Q F ∑ и Р—Q F ∑ . Имеет одно решение, если Р+Q= F ∑ и Р—Q= F ∑ . Даны направление составляющей Q и модуль второй составляющей Р. Решение - методом засечек (пред. рис 1.9!). Задача имеет одно решение, если а = АВ (в этом случае угол между векторами Р и Q равен 90°). Два решения, если а Не имеет решений, если а АВ. Из рис.1.9 видно, что модуль составляющей зависит от направления второй составляющей. " width="640"
F ∑ и Р—Q F ∑ . Не имеет решений, если Р+Q F ∑ и Р—Q F ∑ . Имеет одно решение, если Р+Q= F ∑ и Р—Q= F ∑ . Даны направление составляющей Q и модуль второй составляющей Р. Решение - методом засечек (пред. рис 1.9!). Задача имеет одно решение, если а = АВ (в этом случае угол между векторами Р и Q равен 90°). Два решения, если а Не имеет решений, если а АВ. Из рис.1.9 видно, что модуль составляющей зависит от направления второй составляющей. " width="640"
- Даны модуль и направление одной составляющей Q .
Даны модули двух составляющих Р и Q. Решение - методом засечек (рис.).
Задача имеет два решения, если Р+Q F ∑ и Р—Q F ∑ .
Не имеет решений, если Р+Q F ∑ и Р—Q F ∑ .
Имеет одно решение, если Р+Q= F ∑ и Р—Q= F ∑ .
Даны направление составляющей Q и модуль второй составляющей Р.
Решение - методом засечек (пред. рис 1.9!). Задача имеет одно решение, если а = АВ (в этом случае угол между векторами Р и Q равен 90°).
Два решения, если а Не имеет решений, если а АВ.
Из рис.1.9 видно, что модуль составляющей зависит от направления второй составляющей.

- Пример. Сила давления стружки по направлению, перпендикулярному передней грани резца, равна R . Угол резания резца (угол между передней гранью и направлением движения обрабатываемого предмета) равен δ.
- Определить силу N сопротивления резанию, направленную по линии АВ, и перпендикулярную ей силу S, прижимающую резец к обрабатываемой поверхности (рис.). Трением пренебречь.
- Решение. Разложим заданную силу R на две составляющие N и S по заданным направлениям. Из прямоугольного треугольника получим N = R sin δ, S = R cos δ.

R = ?

- Связь – тело, ограничивающее перемещение данного тела.
- Сила, с которой тело действует на связь - сила давления (F).
- Сила, с которой связь действует на тело – сила реакции связи (R).
- Эти силы по модулю равны и действуют по одной прямой в противоположные стороны (R = -F).
- Силы , действующие на тело - активные и реактивные.
- Активные силы (нагрузка) стремятся перемещать тело, к которому они приложены,
- а реактивные препятствуют этому перемещению. Принципиальное отличие активных сил от реактивных заключается в том, что значение реактивных сил, зависит от значения активных сил, но не наоборот.

- Принцип освобождаемости
- - при решении задач несвободное тело условно изображают как свободное , и формулируют так: всякое несвободное тело можно рассматривать как свободное, если отбросить связи, заменив их реакциями . В результате получаем тело, свободное от связей и находящееся под действием некоторой системы активных и реактивных сил.
- Направление реакций определяется тем, в каком направлении данная связь препятствует перемещению тела.
- Н аправление реакции противоположно направлению перемещения, уничтожае-мого данной связью.

Направление реакций
- 1. Идеально гладкая плоскость
Реакция R направлена перпендикулярно опорной плоскости (по нормали) в сторону тела , так как такая связь не дает телу перемещаться только в сторону опорной плоскости и перпендикулярно ей. Если тело находится на наклонной плоскости, то, разложив силу тяжести G на две составляющие G1 и G 2 , параллельную и перпендикулярную опорной плоскости, можно видеть, что составляющая G1 будет двигать тело вдоль плоскости, а составляющая G 2 будет прижимать тело к плоскости и уравновешиваться реакцией R.

Закрепленная точка или ребро угла (рис., ребро В).
В этом случае реакция R в направлена по нормали к поверхности идеально гладкого тела в сторону тела , так как нормаль к поверхности тела есть единственное направление перемещения, которое не допускают эти связи.

- Гибкая связь (предыд. рис.).
- Реакция R гибкой связи не дает телу лишь удаляться от точки подвеса и поэтому направлена вдоль связи от тела к точке подвеса. Гибкая связь, перекинутая через блок, изменяет направление передаваемого усилия (натяжения нити).

- Гибкая связь. Реакция R направлена вдоль связи от тела к точке подвеса.
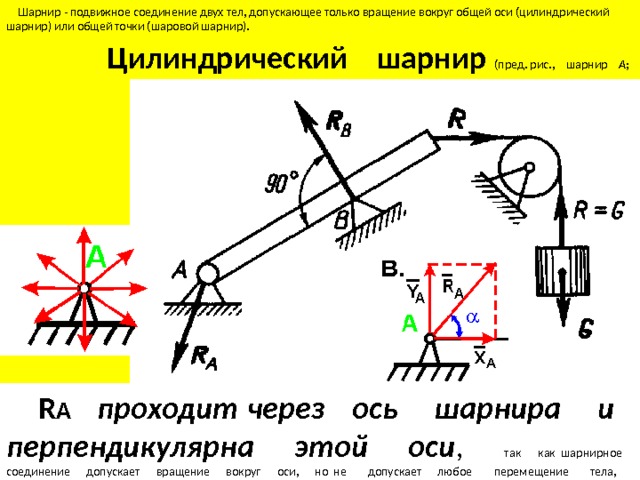
Шарнир - подвижное соединение двух тел, допускающее только вращение вокруг общей оси (цилиндрический шарнир) или общей точки (шаровой шарнир).
- Цилиндрический шарнир (пред. рис., шарнир А;
R A проходит через ось шарнира и перпендикулярна этой оси , так как шарнирное соединение допускает вращение вокруг оси, но не допускает любое перемещение тела, перпендикулярное этой оси.
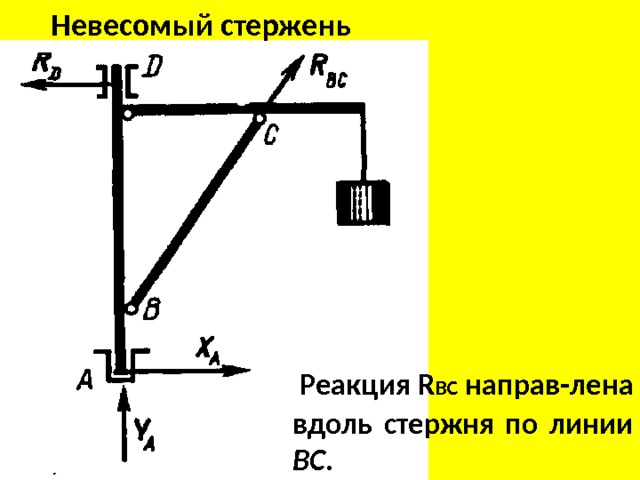
Невесомый стержень
Реакция R BC направ-лена вдоль стержня по линии ВС.

- В дальнейшем мы нередко будем встречаться с элементами различных конструкций, называемых брусьями. Брус - твердое тело, у которого длина значительно больше поперечных размеров; множество (геометрическое место) центров тяжести всех поперечных сечений называется осью бруса.
- Балка – прямолинейный брус на опорах и изгибаемый приложенными к нему нагрузками .

Пример. Определить направление реакций опор балки АВ, шарнирно закрепленной на неподвижной опоре А и опоре В, положенной на катки; указать направление силы давления балки на опору А (рис.). Силой тяжести балки пренебречь.

Решение. Применив принцип освобождаемости, отбросим связи балки, т. с. опоры А и В, и заменим их реакциями R A и R в . Реакция R в подвижного шарнира перпендикулярна опорной плоскости, так как это единственное направление перемещения, уничтожаемое данной связью. Реакция R A неподвижного шарнира проходит через ось, и согласно теореме о равновесии трех непараллельных сил, линия действия этой реакции должна проходить через точку М. Реакция R A будет направлена по линии АМ вправо и вверх, так как если опору А мысленно отбросить, то без реакции конец А балки будет под действием силы F перемещаться влево и вниз.
Согласно третьему закону Ньютона, сила давления R A ' балки на опору также будет направлена по линии АМ, но в противоположную сторону. Определим угол α:
![Распределенные нагрузки Ранее мы изучали силы приложенные в точке - сосредоточенные . В практике часто встречаются силы, приложенные по объему или поверхности тела, например сила тяжести, давление ветра или воды и т. п. Такие силы называют распределенными . Характеристика распределенных сил - интенсивность . Это сила, приходящаяся на единицу длины нагруженного участка. [ q ] = Н/м.](https://fhd.multiurok.ru/1/1/d/11d05311c50b4bcb546effb09d6ba9b399223b87/img32.jpg)
- Распределенные нагрузки
- Ранее мы изучали силы приложенные в точке - сосредоточенные .
- В практике часто встречаются силы, приложенные по объему или поверхности тела, например сила тяжести, давление ветра или воды и т. п. Такие силы называют распределенными .
- Характеристика распределенных сил - интенсивность . Это сила, приходящаяся на единицу длины нагруженного участка. [ q ] = Н/м.
![Это сила, приходящаяся на единицу длины нагруженного участка. [ q ] = Н/м. Распределенная нагрузка c постоянной интенсивностью-равномерно распределенная (рис.). При решении задач распределенную нагрузку заменяют ее равнодействующей. Модуль равнодействующей равномерно распределенной нагрузки равен Q = q l . Приложена равнодействующая Q в середине отрезка АВ.](https://fhd.multiurok.ru/1/1/d/11d05311c50b4bcb546effb09d6ba9b399223b87/img33.jpg)
- Это сила, приходящаяся на единицу длины нагруженного участка. [ q ] = Н/м.
- Распределенная нагрузка c постоянной интенсивностью-равномерно распределенная (рис.).
При решении задач распределенную нагрузку заменяют ее равнодействующей. Модуль равнодействующей равномерно распределенной нагрузки равен Q = q l .
Приложена равнодействующая Q в середине отрезка АВ.

Задания для самоподготовки:
1. Указать правильное направление реакций связей в опорах:
в) А,В,С?
а) А,В?
б) А,В?
г) А,В?

д)А,В?
е)О,С,D?
ж)А,В,С?
и)А,В?
з) А,В?

- Список использованных источников
- 1. Эрдеди А.А. Техническая механика: Теоретическая механика. Сопротивление материалов. М.: 2005.
- 2. Автор и источник заимствования неизвестен.

Конец








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

