
, ГПОУ "Читинский техникум отраслевых технологий и бизнеса", г. Чита, Забайкальский край


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 11.09.2025 06:43

Батуев Б. Н.
Преподаватель профмодуля
70 лет
Местоположение
Специализация
2 Система сходящихся сил
Категория:
Прочее
06.09.2016 15:31

Просмотр содержимого документа
«2 Система сходящихся сил»
- ГПОУ «Читинский техникум отраслевых технологий и бизнеса»
Презентация по технической механике
на тему « Плоская система сходящихся сил »
Разработал: преподаватель Батуев Б. Н.
Чита - 2015

ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ- линии действия которых лежат в одной плоскости и все пересекаются в одной точке.

Плоская система сходящихся сил эквивалентна равнодействующей, которая равна векторной сумме этих сил; линия действия равнодействующей проходит через точку пересечения линий действия составляющих.
Построение, выполненное на рис. а, можно заменить более простым (рис. б).
Многоугольник АВСD называется силовым многоугольником.
- Способы определения равнодействующей:
- геометрический ( с помощью геометрии, тригонометрии),
- графический (с помощью чертежа в масштабе. Равнодей-ствующая определится измере-нием замыкающей стороны и умножением на масштаб.
Геометрическое условие равнове-сия плоской системы сходящихся сил
- F ∑ = F 1 + F 2 + F 3 + … + F n = ∑F i = 0
- Для равновесия необходимо и достаточно, чтобы силовой многоугольник был замкнут.
- Условия равновесия в виде равенств с неизвестными называются уравнениями равновесия.
- Этапы решения задачи статики :
- 1) Выбор тела для равновесия;
- 2) Отбрасывание связи и замена реак-циями.
- 3) Установление системы сил, дейст-вующих на тело;
- 4) Используя условия равновесия, на-хождение неизвестных.
- При решении задач размерности, единицы величин слагаемых и обеих частей уравнения должны быть одинаковыми.

Проекции силы на оси координат
- В тех случаях, когда на тело действует более трех сил, а также когда неизвестны направления некоторых сил, удобнее при решении задач пользоваться не геометрическим, а аналитическим условием равновесия, которое основано на методе проекций.
- - отрезок оси, заключенный между двумя перпендикулярами, опущенными на ось из начала и конца вектора силы.

- Пусть даны координатные оси х, у, сила Р, приложенная в точке А и расположенная в плоскости координатных осей (рис.).
- Проекциями силы Р на оси будут отрезки аЬ и а'b'. Обозначим эти проекции соответственно Р х и Р у . Тогда
- Px = P cos α; Py = P sin α.
- Проекция силы на ось есть величина алгебраическая, которая может быть положительной или отрицательной, что устанавливается по направлению проекции. За направление проекции примем направление от проекции начала к проекции конца вектора силы.

- правило знаков: если направление проекции силы на ось совпадает с положительным направлением оси, то эта проекция считается (+), и наоборот.
- Если вектор силы // оси, то он проецируется на эту ось в натуральную величину (сила F).
- Если вектор силы перпендикулярен оси, то его проекция на эту ось равна 0 (сила Q).

- Зная две проекции Р х и Р у , из треугольника A ВС определяем модуль и направление вектора силы Р по следующей формуле:
- модуль силы
- P = √(Px² + Py²),

Аналитический (математический) способ определения равнодействующей плоской системы сходящихся сил
- Пусть дана плоская система n сходящихся сил
- F1, F2, F3, …, Fn.
- Равнодействующая этой системы
- F∑ = ∑Fi.
- В плоскости действия данной системы выберем ось координат и спроецируем данные силы и их равнодействующую на эту ось.
Из математики известно свойство проекции векторной суммы, на основании которого можно утверждать, что проекция равнодействующей на ось равна алгебраической сумме проекций составляющих сил на ту же ось, т. е.
F ∑ x = ∑F ix .
- Правую часть этого равенства записываем упрощенно, а именно:
F ∑ x = ∑x.
- Для того чтобы определить равнодействующую любой плоской системы сходящихся сил, спроецируем их на оси координат х и у, алгебраически сложим проекции всех сил и найдем, таким образом, проекции равнодействующей:
F ∑ x = ∑x, F ∑ y = ∑y.
- Зная проекции, на основании формул, определим модуль и направление равнодействующей: модуль равнодействующей
F ∑ = √F ∑ x² + F ∑ y² ;
- направляющий тангенс угла между вектором F ∑ и осью х
tg (F ∑ , x ) = F ∑ y / F ∑ x .
- Линия действия равнодействующей проходит через точку пересечения линий действия составляющих сил.

Аналитические условия равновесия плоской системы сходящихся сил
- Если данная плоская система сходящихся сил находится в равновесии, то равнодействующая такой системы, а значит, и проекции равнодействующей на оси координат равны нулю:
- F∑ = 0, F∑x = 0, F∑y = 0.
- Учитывая, что F∑x = ∑x , F∑y = ∑y ,
- получаем равенства, выражающие аналитические условия равновесия плоской системы сходящихся сил: ∑x = 0, ∑y = 0.
- Формулируются эти условия следующим образом: для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы алгебраическая сумма проекций этих сил на каждую из двух координатных осей равнялась нулю.
С помощью уравнений равновесия можно определить два неизвестных элемента данной системы сил, например модуль и направление одной силы или модули двух сил, направления которых известны, и т. п.
- Выведенные условия равновесия справедливы для любых осей координат, но для упрощения решения задач рекомендуется оси координат выбирать по возможности перпендикулярными неизвестным силам, чтобы каждое уравнение равновесия содержало одно неизвестное.
- Когда направление искомой силы неизвестно, ее можно разложить на две составляющие по заданным направлениям, обычно по направлениям координатных осей; по найденным двум взаимно перпендикулярным составляющим легко определяется неизвестная сила.
- Если при решении задач аналитическим способом искомая реакция получится отрицательной, то это значит, что действительное ее направление противоположно направлению, принятому на рисунке.
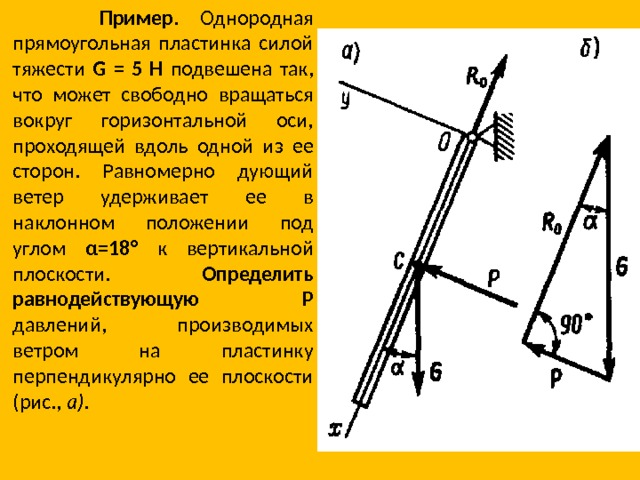
- Пример . Однородная прямоугольная пластинка силой тяжести G = 5 Н подвешена так, что может свободно вращаться вокруг горизонтальной оси, проходящей вдоль одной из ее сторон. Равномерно дующий ветер удерживает ее в наклонном положении под углом α=18° к вертикальной плоскости. Определить равнодействующую Р давлений, производимых ветром на пластинку перпендикулярно ее плоскости (рис., а).

- Решение. Рассмотрим равновесие пластинки. Отбросим шарнир О. Так как пластинка однородная и прямоугольной формы, то равнодействующая Р давлений ветра и сила тяжести G пересекаются в геометрическом центре С пластинки; линия действия реакции R 0 шарнира на основании теоремы о равновесии трех непараллельных сил также пройдет через точку С. Для системы трех сходящихся сил, действующих на пластинку, применимо аналитическое условие равновесия ∑У=0, направив ось у перпендикулярно пластинке (чтобы реакция R 0 , которую не требуется определять, не вошла в уравнение равновесия). Составим уравнение равновесия
- ∑ У=0; P – G sin α = 0,
- откуда
- P = G sin α = 5 · 0,309 ≈ 1,55 Н.
- Проведем проверку решения задачи с помощью геометрического условия равновесия:
- ∑ Fi = 0; G + P + R0 = 0.
- Построим замкнутый силовой треугольник (рис., б). Решая его, получим P = G· sin α = 5 sin 18°≈ 1,55 Н.
- Список использованных источников
- 1. Эрдеди А.А. Техническая механика: Теоретическая механика. Сопротивление материалов. М.: 2005.
- 2. Автор и источник заимствования неизвестен.

Конец






Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

