
Россия, Дзержинск


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 16.06.2025 22:20

Ивонина Татьяна Викторовна
учитель технологии
4 года
Местоположение
Специализация
Функциональное разнообразие роботов
Категория:
Технология (девочки)
20.05.2025 23:14

Просмотр содержимого документа
«Функциональное разнообразие роботов»

Функциональное разнообразие роботов. 6 класс
Вспомните, любое ли управляемое устройство является роботом. Что представляет себе человек, когда звучит слово «робот»?
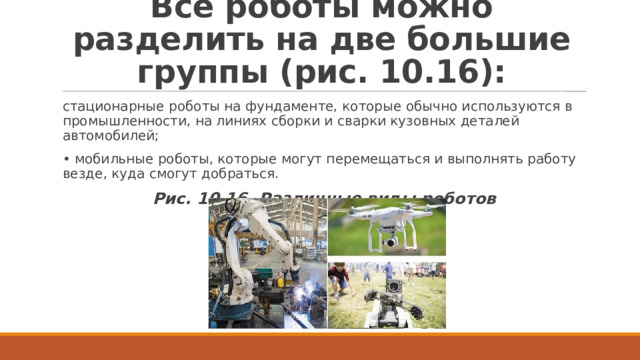
Все роботы можно разделить на две большие группы (рис. 10.16):
- стационарные роботы на фундаменте, которые обычно используются в промышленности, на линиях сборки и сварки кузовных деталей автомобилей;
- • мобильные роботы, которые могут перемещаться и выполнять работу везде, куда смогут добраться.
- Рис. 10.16. Различные виды роботов

Мобильные и промышленные роботы.
- Мобильные роботы различаются по способу передвижения: есть передвигающиеся на колёсах или гусеницах, шагающие, плавающие и летающие.
- Роботы могут выполнять различные функции.
- Промышленные роботы — это, как правило, мощные роботы-манипуляторы, установленные на неподвижном фундаменте, они способны выполнять действия в радиусе, равном длине их «руки». На конвейере их ставят несколько в ряд, и каждый выполняет определённые операции (рис. 10.17).

Puc. 10.17. Сборочная линия с промышленными роботами
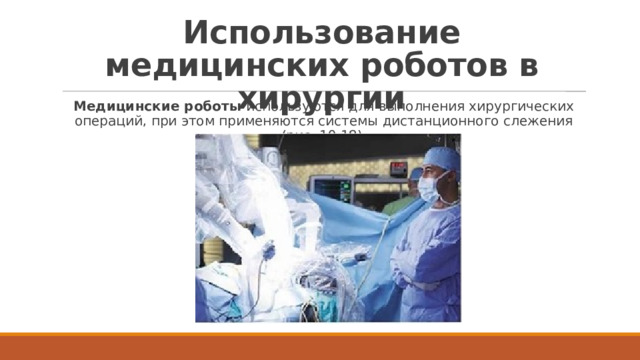
Использование медицинских роботов в хирургии
- Медицинские роботы используются для выполнения хирургических операций, при этом применяются системы дистанционного слежения (рис. 10.18).
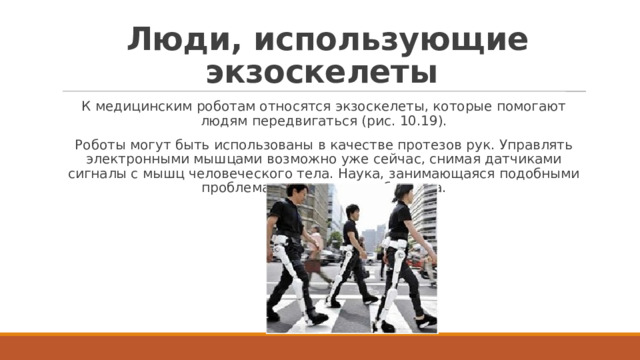
Люди, использующие экзоскелеты
- К медицинским роботам относятся экзоскелеты, которые помогают людям передвигаться (рис. 10.19).
- Роботы могут быть использованы в качестве протезов рук. Управлять электронными мышцами возможно уже сейчас, снимая датчиками сигналы с мышц человеческого тела. Наука, занимающаяся подобными проблемами, называется бионика.

Сельскохозяйственные роботы и подводные роботы .
- Сельскохозяйственные роботы используются в растениеводстве и животноводстве (рис. 10.21). Они помогают кормить животных, удобрять и поливать растения, возделывать почву.
- Подводные роботы используются в морском деле для проведения аварийно-спасательных работ и различных исследований на дне моря (рис. 10.20).

- Первым космическим роботом можно считать луноход, отправленный на Луну ещё во времена СССР — в далёком 1970 году (рис. 10.22).
Рис. 10.22. Советский луноход
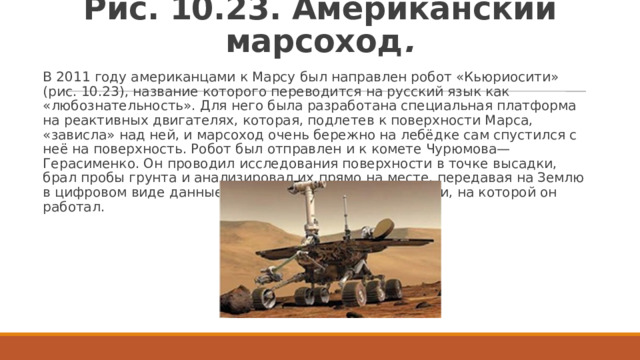
Рис. 10.23. Американский марсоход .
- В 2011 году американцами к Марсу был направлен робот «Кьюриосити» (рис. 10.23), название которого переводится на русский язык как «любознательность». Для него была разработана специальная платформа на реактивных двигателях, которая, подлетев к поверхности Марса, «зависла» над ней, и марсоход очень бережно на лебёдке сам спустился с неё на поверхность. Робот был отправлен и к комете Чурюмова—Герасименко. Он проводил исследования поверхности в точке высадки, брал пробы грунта и анализировал их прямо на месте, передавая на Землю в цифровом виде данные о составе почвы и поверхности, на которой он работал.

Сервисные роботы
- Сервисные роботы помогают нам в повседневной жизни. К ним, например, относится робот-пылесос. В местах большого скопления людей используют роботы телеприсутствия (рис. 10.24), которые помогают сориентироваться, подсказывают, куда сейчас стоит сходить, и отвечают на вопросы посетителей.
Рис. 10.24 Робот телеприсутствия.
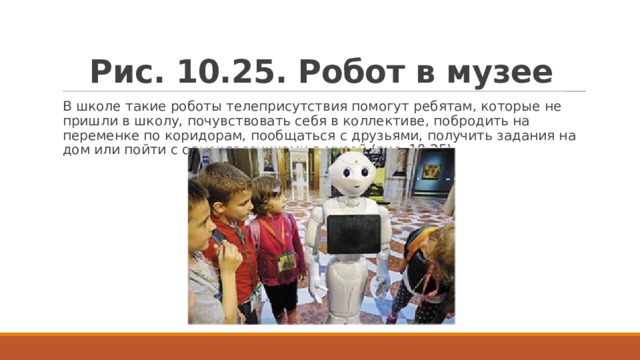
Рис. 10.25. Робот в музее
- В школе такие роботы телеприсутствия помогут ребятам, которые не пришли в школу, почувствовать себя в коллективе, побродить на переменке по коридорам, пообщаться с друзьями, получить задания на дом или пойти с одноклассниками в музей (рис. 10.25)

Японский робот Асимо (рис. 10.26)
- Самым известным шагающим сервисным роботом является японский робот Асимо (рис. 10.26). Такие роботы уже используются в некоторых кафе как разносчики заказанной еды.

- К сервисным роботам можно отнести систему круиз-контроля в автомобилях. Причём если раньше такие системы только поддерживали определённую скорость при движении по трассе, то сейчас появились значительно более умные системы круиз-контроля, которые определяют ещё и расстояние до идущего впереди автомобиля и позволяют двигаться со скоростью, задаваемой лидером в колонне.
- Круиз-контроль (САПС) ( англ. Cruise control , нем. Tempomat , также встречается «автоспид» и «автодрайв») — устройство, поддерживающее постоянную скорость автомобиля , автоматически прибавляя газ при снижении скорости движения и уменьшая при её увеличении, к примеру, на спусках, без участия водителя.
Вопросы и задания:
- 1. Какую систему классификации вы можете предложить для роботов?
- 2. Каких роботов целесообразно использовать для работы на конвейере автомобильного предприятия (шагающих, стационарных, мобильных)?
- 3. Какими должны быть подводные роботы: программно-управляемыми (автономными) или дистанционно управляемыми? Почему?
- 4. Что можно считать первым космическим роботом? Какие ещё космические роботы вам известны?
- Задание
- Выберите один из типов роботов и подготовьте доклад о таких роботах.
Домашнее задание:
- Задание
- Выберите один из типов роботов и подготовьте доклад о таких роботах
- Спасибо за внимание!







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

