
Россия, Тамбов


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 18.04.2026 12:44

Кириллов Роман Александрович
Учитель информатики
44 года
Местоположение
Специализация
Лего-конструирование
Категория:
Прочее
17.01.2023 23:46

Просмотр содержимого документа
«Лего-конструирование»
Лего- конструирование
Кириллов Роман Александрович

Роботы в нашей жизни
Промышленные роботы
Космические роботы
Военные роботы
Нанороботы
Роботы-хирурги
Роботы -охранники
Экзоскелеты
Роботы для игр

robo-wiki.ru
Точные перемещения. Гироскопический датчик
Робот-чертёжник
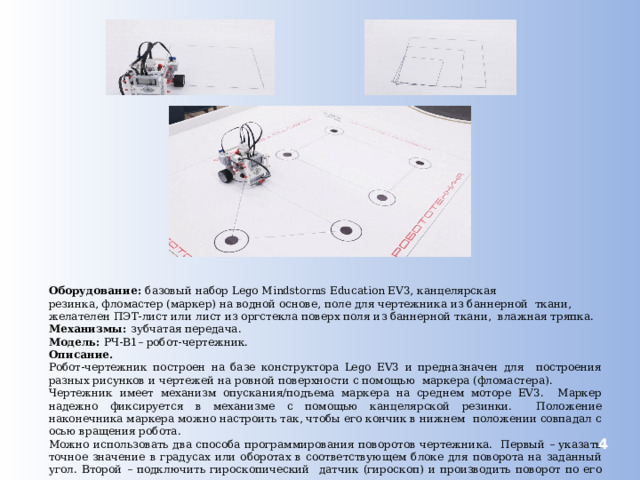
Оборудование: базовый набор Lego Mindstorms Education EV3, канцелярская
резинка, фломастер (маркер) на водной основе, поле для чертежника из баннерной ткани, желателен ПЭТ-лист или лист из оргстекла поверх поля из баннерной ткани, влажная тряпка.
Механизмы: зубчатая передача.
Модель: РЧ-В1– робот-чертежник.
Описание.
Робот-чертежник построен на базе конструктора Lego EV3 и предназначен для построения разных рисунков и чертежей на ровной поверхности с помощью маркера (фломастера).
Чертежник имеет механизм опускания/подъема маркера на среднем моторе EV3. Маркер надежно фиксируется в механизме с помощью канцелярской резинки. Положение наконечника маркера можно настроить так, чтобы его кончик в нижнем положении совпадал с осью вращения робота.
Можно использовать два способа программирования поворотов чертежника. Первый – указать точное значение в градусах или оборотах в соответствующем блоке для поворота на заданный угол. Второй – подключить гироскопический датчик (гироскоп) и производить поворот по его показаниям.

robo-wiki.ru
Часть 1. Сборка механизма для опускания/подъема маркера
1
Для опускания и подъема маркера будем использовать средний мотор EV3
Закрепи две Т-балки
2
x1
x2
x1 z12
x4
x1
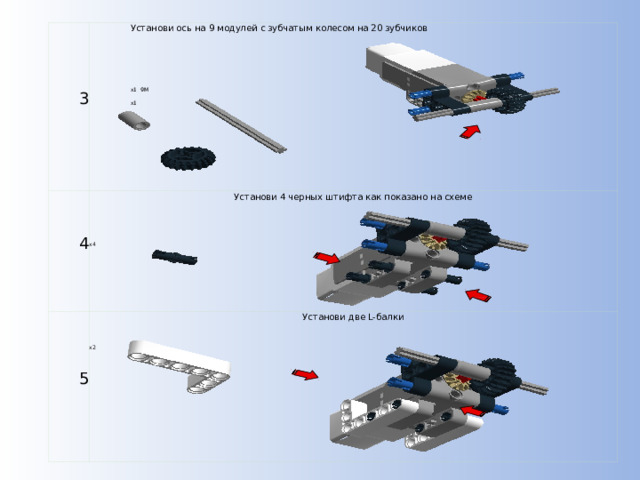
Установи ось на 9 модулей с зубчатым колесом на 20 зубчиков
3
Установи 4 черных штифта как показано на схеме
4
5
Установи две L-балки
x1 9M
x1
x4
x1 z20
x2
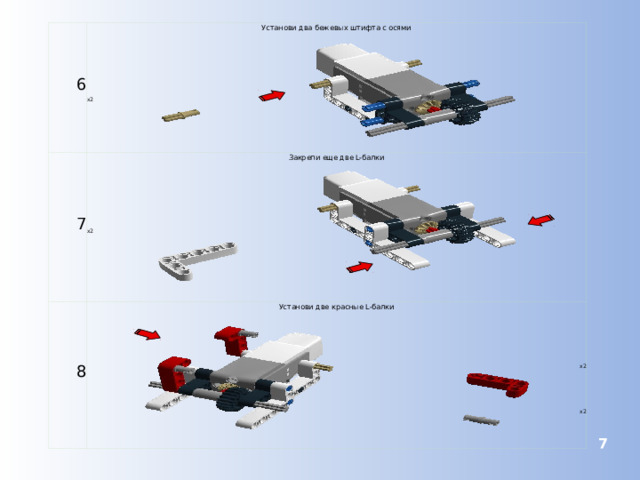
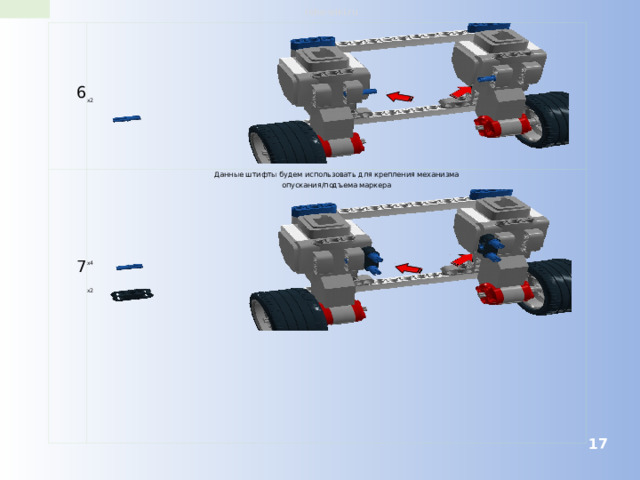
6
Установи два бежевых штифта с осями
7
Закрепи еще две L-балки
8
Установи две красные L-балки
x2
x2
x2
x2
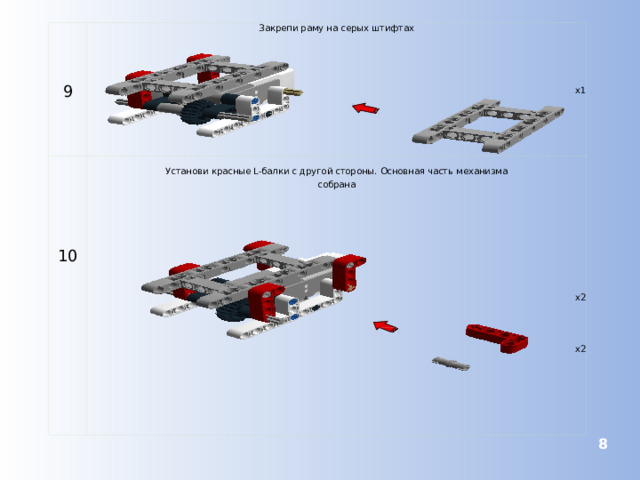
9
Закрепи раму на серых штифтах
10
Установи красные L-балки с другой стороны. Основная часть механизма
собрана
x1
x2
x2
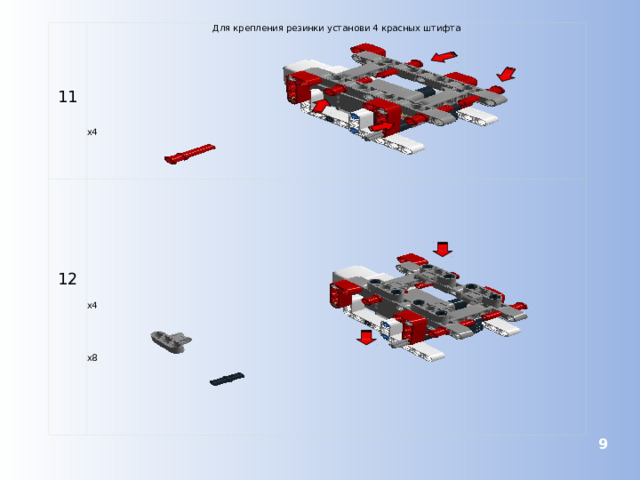
Для крепления резинки установи 4 красных штифта
11
12
x4
x4
x8
robo-wiki.ru
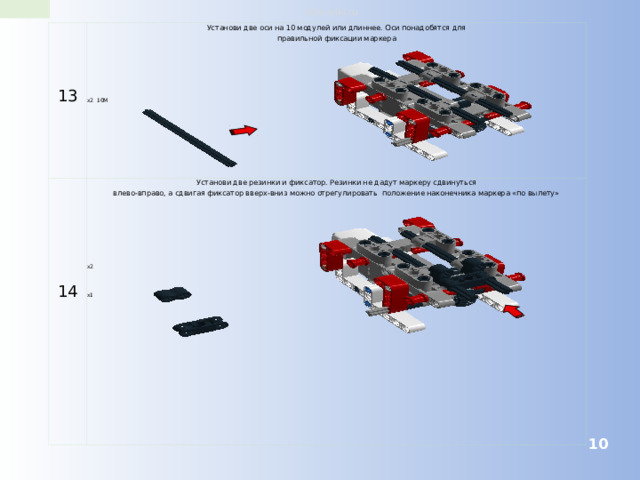
13
Установи две оси на 10 модулей или длиннее. Оси понадобятся для
правильной фиксации маркера
Установи две резинки и фиксатор. Резинки не дадут маркеру сдвинуться
влево-вправо, а сдвигая фиксатор вверх-вниз можно отрегулировать положение наконечника маркера «по вылету»
14
x2 10M
x2
x1
robo-wiki.ru
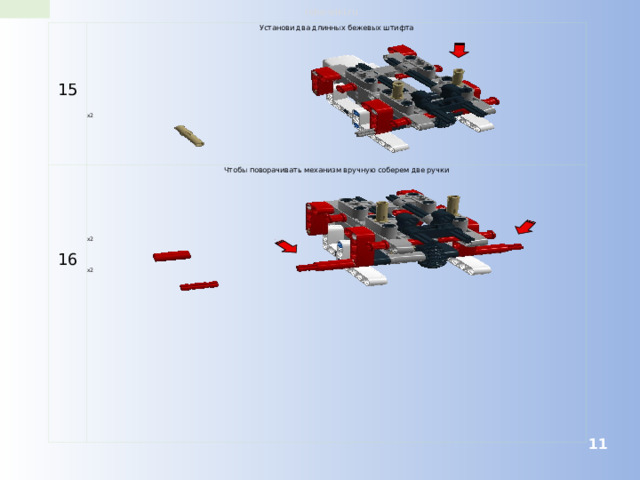
15
Установи два длинных бежевых штифта
16
Чтобы поворачивать механизм вручную соберем две ручки
x2
x2
x2
robo-wiki.ru
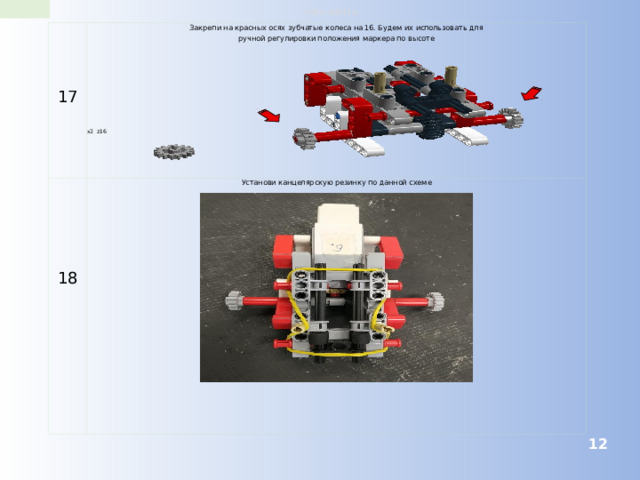
17
Закрепи на красных осях зубчатые колеса на 16. Будем их использовать для
ручной регулировки положения маркера по высоте
18
Установи канцелярскую резинку по данной схеме
x2 z16
robo-wiki.ru
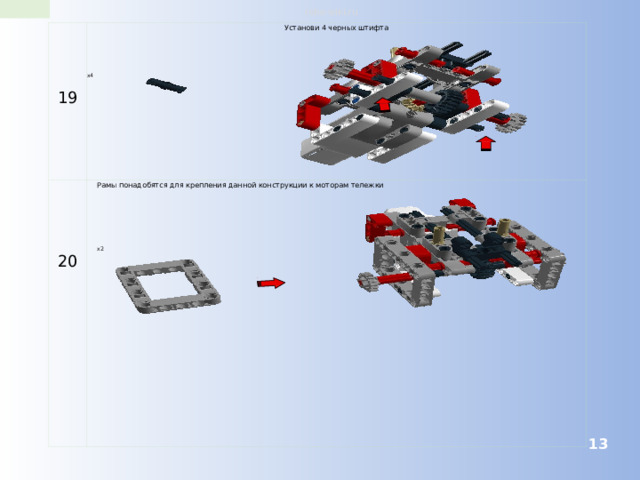
19
Установи 4 черных штифта
Рамы понадобятся для крепления данной конструкции к моторам тележки
20
x4
x2

robo-wiki.ru
21
Закрепи маркер (фломастер) на водной основе, используя эту схему.
Перманентные маркеры использовать нельзя!
Колпачок пока не снимай!
robo-wiki.ru
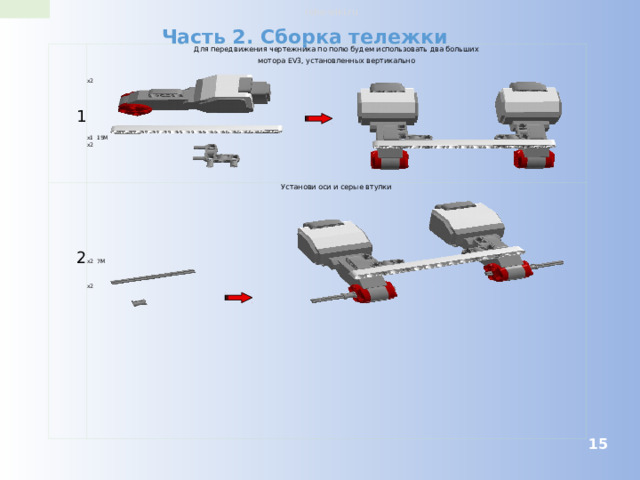
Часть 2. Сборка тележки
1
Для передвижения чертежника по полю будем использовать два больших
мотора EV3, установленных вертикально
Установи оси и серые втулки
2
x2
x2 7M
x1 15M
x2
x2
robo-wiki.ru
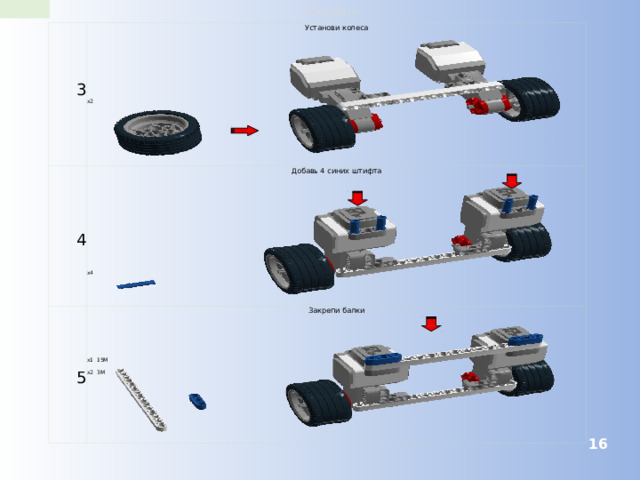
3
Установи колеса
4
Добавь 4 синих штифта
5
Закрепи балки
x2
x4
x1 15M
x2 3M
robo-wiki.ru
6
x2
7
Данные штифты будем использовать для крепления механизма
опускания/подъема маркера
x4
x2
robo-wiki.ru
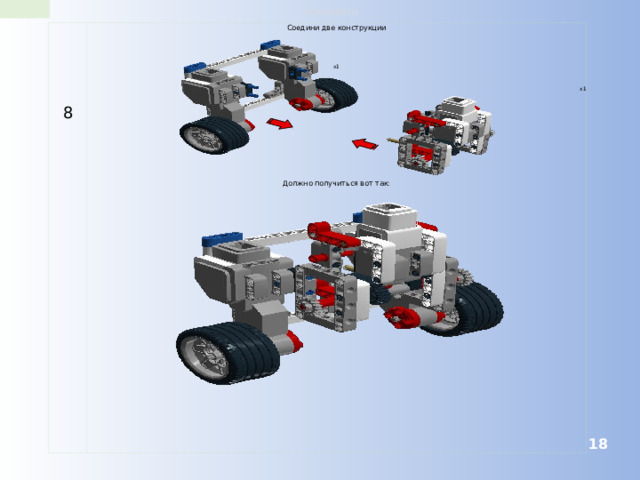
8
Соедини две конструкции
x1
x1
Должно получиться вот так:
robo-wiki.ru
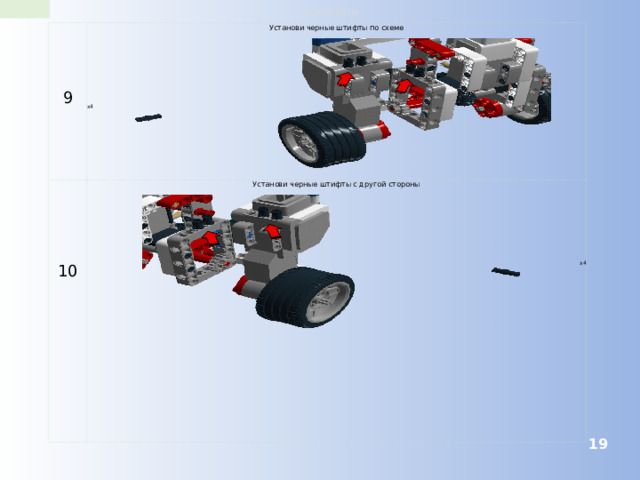
9
Установи черные штифты по схеме
10
Установи черные штифты с другой стороны
x4
x4
robo-wiki.ru
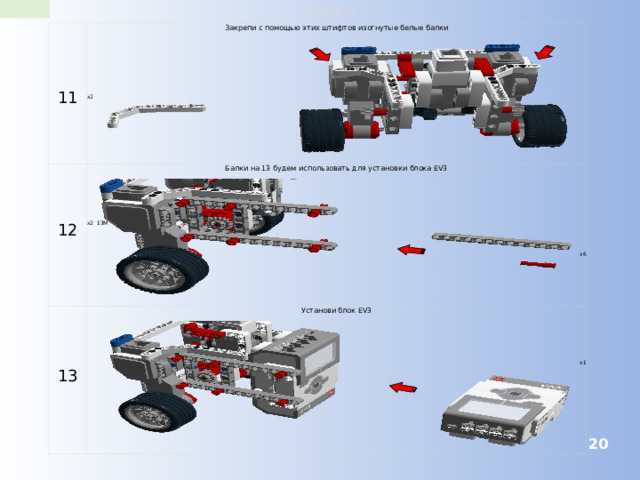
11
Закрепи с помощью этих штифтов изогнутые белые балки
12
Балки на 13 будем использовать для установки блока EV3
13
Установи блок EV3
x2
x2 13M
x1
x6
robo-wiki.ru
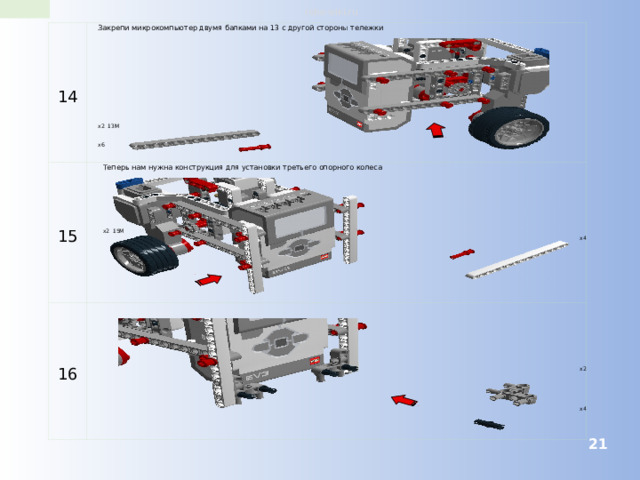
14
Закрепи микрокомпьютер двумя балками на 13 с другой стороны тележки
Теперь нам нужна конструкция для установки третьего опорного колеса
15
16
x2 13M
x2
x2 15M
x4
x6
x4
robo-wiki.ru
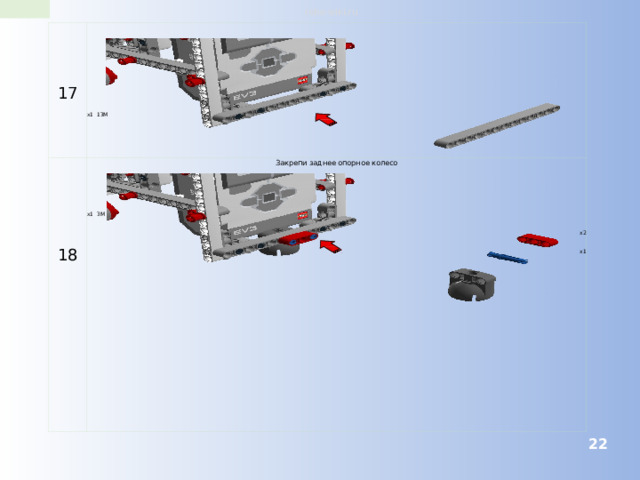
17
x1 13M
18
Закрепи заднее опорное колесо
x1 3M
x2
x1
robo-wiki.ru
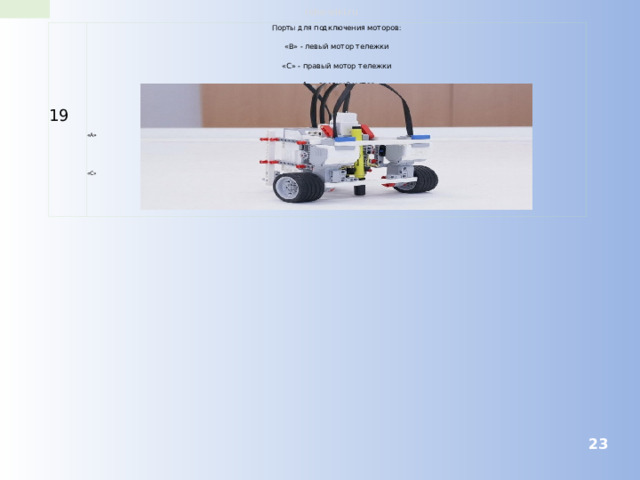
19
Порты для подключения моторов:
«B» - левый мотор тележки
«С» - правый мотор тележки
«А» - средний мотор
«A»
«C» «B»

robo-wiki.ru
Часть 3. Подключение гироскопического датчика
Закрепи датчик так, чтобы указанная на нем ось вращения (обозначена в
виде красной точки) совпадала по направлению с осью вращения робота
1
2
Соедини датчик с блоком EV3 с помощью кабеля.
Порт для подключения - «4»
x2
x1
x1

robo-wiki.ru
Часть 4. Задачи
Задача №1. Начерти квадрат, используя цикл. После запуска программы и перед началом движения робот ждет 1 секунду. Побеждает та команда, чья фигура ближе к идеальному квадрату.
Задача №2. Начерти три вложенных квадрата по данной схеме. После запуска программы и перед началом движения робот ждет 1 секунду.
Изменить алгоритм на свое усмотрение (изменяя параметры движения вперед и изменяя угол поворота, и зациклив робота на бесконечное число повторений тела цикла) и посмотреть какие фигуры будет рисовать робот
robo-wiki.ru
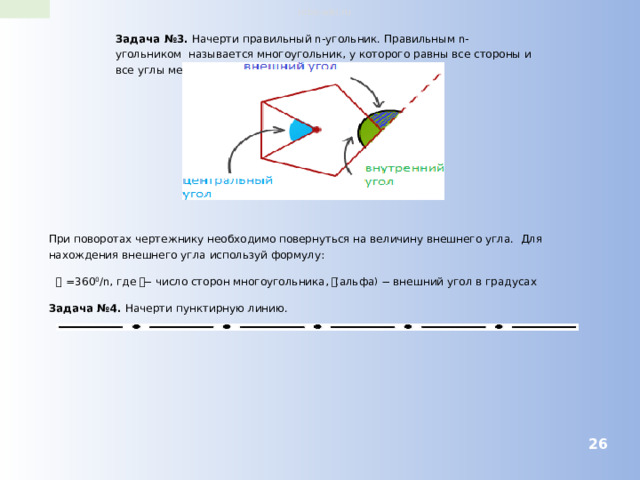
Задача №3. Начерти правильный n-угольник. Правильным n-угольником называется многоугольник, у которого равны все стороны и все углы между смежными сторонами.
При поворотах чертежнику необходимо повернуться на величину внешнего угла. Для нахождения внешнего угла используй формулу:
𝜶 =360 0 /n , где 𝒏 − число сторон многоугольника, 𝜶 ( альфа ) − внешний угол в градусах
Задача №4. Начерти пунктирную линию.

robo-wiki.ru
Задача №5. Начерти домик по данной схеме. Для этой задачи необходимо поле для чертежника с 7 точками.
100 баллов – если робот начертил всю фигуру, а вершины многоугольника находятся в пределах черной метки. Штраф 10 баллов взымается за каждую
вершину, которая вышла за пределы черной метки, но находится в пределах круга. Если вершина находится вне большого круга, фигура не засчитывается.
 = 90 (угол подбирается экспериментально). Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания. Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием . " width="640"
= 90 (угол подбирается экспериментально). Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания. Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием . " width="640"
robo-wiki.ru
Часть 5. Советы программисту
1
После запуска программы установи блок ожидания, чтобы успеть убрать руку перед
началом движения робота:
2
Опускать и поднимать маркер лучше по времени. Если установить точное значение в
градусах или оборотах, то в случаях, когда мотор не может больше крутиться, а поворачивать еще надо, программа зависает на этом блоке.
3
- При повороте направо (по часовой стрелке) значения на гироскопическом датчике
растут. Алгоритм для поворота будет такой: поворачивайся на месте направо, пока датчик не покажет значение = 90 (угол подбирается экспериментально).
- Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания.
- Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием .
robo-wiki.ru
4
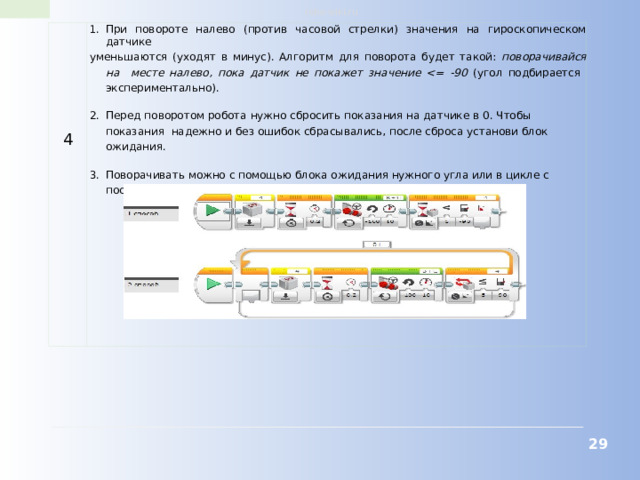
- При повороте налево (против часовой стрелки) значения на гироскопическом датчике
уменьшаются (уходят в минус). Алгоритм для поворота будет такой: поворачивайся на месте налево, пока датчик не покажет значение (угол подбирается экспериментально).
- Перед поворотом робота нужно сбросить показания на датчике в 0. Чтобы показания надежно и без ошибок сбрасывались, после сброса установи блок ожидания.
- Поворачивать можно с помощью блока ожидания нужного угла или в цикле с постусловием.

Спасибо за внимание!
Улыбнитесь!
Комплекты видеоуроков для учителей







Скачать
© 2023, Кириллов Роман Александрович 1075 19
Похожие файлы
Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

