








© 2018, Рыжкова Марина Николаевна 1094 21


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 10.05.2025 18:34

Рыжкова Марина Николаевна
учитель начальных классов
7 лет
Проект: Марсоход
Категория:
Начальные классы
02.11.2018 08:58

Просмотр содержимого документа
«Проект: Марсоход»
МУНИЦИПАЛЬНОЕ БЮДЖЕТНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ОДИНЦОВСКАЯ СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ
ШКОЛА №16
(143000, Московская область, г. Одинцово, ул.Чистяковой, д.10)
тел.8(495)589-32-09
КОНКУРСНАЯ РАБОТА
(проект)
«Марсоход»
|
| Выполнил: Сизых Артём, Ученик4 класса
|
|
| Руководитель: Рыжкова Марина Николаевна, учитель младших классов Одинцовской средней общеобразовательной школы №16
|
Паспорт проекта……………………………………………………….…………………..2
Введение…………………………………………………………………………………………..3 Исследовательская часть: информация об успешно выполненных миссиях марсоходов………………………………………………………………………..5
Результат исследовательской части: определение особенностей конструкции марсоходов…………………………………………………………………10
Глоссарий… ..………………………………………………………………………………………12
Паспорт проекта
Название проекта: «Марсоход»
Образовательное учреждение: Одинцовская МБОУ СОШ №16
Автор проекта: Сизых Артём, 4Г класс
Научный руководитель: Рыжкова М.Н, учитель начальной школы
Цель: изучить особенности устройство марсоходов, ранее успешно выполнявших миссии на Марсе и на этой основе разработать прототип своего марсохода.
Задачи:
1. собрать научный и практический материал по данному вопросу (узнать о марсоходах)
2. изучить истории о марсоходах
3. выделить особенности устройства марсоходов
4. создать свой прототип марсохода
Результат (Продукт): «Действующая модель марсохода Curiosity »
Этапы работы:
1. Первый этап – исследовательский.
Результатом этого этапа стал сбор информации о марсоходах
2. Второй этап - организационно-творческий.
Результатом этого этапа стало определение основных особенностей устройства марсоходов и разработка проекта марсохода.
3. Третий этап – организационный.
Результатом этого этапа стала постройка модели марсохода.
5. Четвёртый этап – подведение итогов.
Результатом этого этапа стало создание письменной работы, презентация проекта.
ВВЕДЕНИЕ
Прошлым летом мы купили ”будущий” марсоход – конструктор Lego Mindstorms EV3. Мы решили построить из него робот – марсоход. Назвали его - Curiosity - в честь одного марсохода, который до сих пор, в миллионах километров от Земли бороздит поверхность Марса. Глядя на него, мне захотелось узнать и представить себя в роли исследователя Марса.
Я сильнее заинтересовался этой темой и изучил много информации. Постройка и управление марсоходом действительно имеют свои особенности, ведь марсоход движется по местности, где нет дорог, а сигнал управления идет до Марса 14 минут, и отклик от Марсохода приходит почти через полчаса после отправки сигнала. Марс далеко!
Основываясь на информаци о марсоходах, успешно выполнивших свои мисси на Марсе я сделал модель марсохода.
Итак, марсохо́д — планетоход, передвигающийся по поверхности Марса. Мягкая посадка марсоходов на Марс при спуске на поверхность планеты из космоса осуществляется с помощью спускаемых аппаратов.
На Марсе функционировали четыре автоматических марсохода с целью проведения научных исследований, два из них продолжают работу в настоящий момент.
Исследования Марса не прекращаются, поэтому планируется также новая миссия - Марсоход НАСА «Марс-2020», являющийся наследником миссии марсохода Curiosity; запуск планируется в 2020 году. О начале работ по программе объявлено представителем НАСА 4 декабря 2012 на ежегодном съезде Американского геофизического союза. Одной из главных задач этого марсохода станет обнаружение возможных признаков жизни и «складирование» образцов (общим числом в 31 экземпляр, каждый по 300—400 граммов) с целью их возможной доставки обратно на Землю будущими экспедициями. Кроме того, учёные планируют использовать марсоход как платформу для изучения условий на Марсе в контексте постройки обитаемой базы на его поверхности. В частности, наследник Curiosity оценит опасность марсианской пыли и измерит долю угарного газа в его атмосфере. Конструктивно новый марсоход будет состоять по большей части из узлов и деталей, которые разрабатывались для Curiosity. Таким образом, это позволит снизить себестоимость разработки устройства, с 2,5 миллиарда долларов до 1,5. Кроме всего прочего, учёным придётся снизить и количество научного оборудования, а также упростить некоторые аналитические модули. На Curiosity установлено научного оборудования почти на 2 миллиарда долларов США. На новом марсоходе оборудования поставят всего на 100 миллионов. Он не будет нести ни масс-спектрометра, ни некоторых других узлов, однако будет установлен ультрафиолетовый спектрометр, способный обнаруживать органические вещества.
Mars Sample Return Mission — возможно, марсоход будет одним из элементов этой программы доставки грунта с Марса; старт запланирован на 2022 год.
Китайский марсоход планируется доставить космическим кораблём на орбиту Марса, в июле-августе 2020 года. Центр космического проектирования при Комитете оборонной науки, техники и промышленности КНР планирует осуществить запуск при помощи ракеты-носителя "Чанчжэн-5" с космодрома Вэньчан. Далее, через семь месяцев полета запланировано осуществить посадку в районе низких широт в северном полушарии Марса, где шестиколёсный марсоход весом 200 кг, с питанием от четырех солнечных батарей в течение трех марсианских месяцев будет вести исследование поверхности планеты.
Для того, чтобы понять основные особенности устройства марсоходов и построить свой прототип, я исследовал информацию об успешных миссиях на Марсе.
ИНФОРМАЦИЯ ОБ УСПЕШНЫХ МИССИЯХ МАРСОХОДОВ
Первым марсоходом, успешно выполнившим свою миссию был Прибор оценки проходимости — Марс (ПрОП-М). 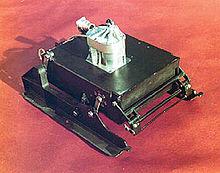
Также, одинаковые марсоходы входили в состав автоматических марсианских станций, которые должны были быть доставлены на поверхность Марса в 1971 году спускаемыми аппаратами советских автоматических межпланетных станций Марс-2 и Марс-3.
Данные марсоходы подключены 15 метровым кабелем к марсианской станции. Манипулятор помещает марсоход на участок поверхности снимаемый телекамерой станции.
От других запущенных планетоходов ПрОП-М (Марс, Марс 1, Марс 2) отличались системой передвижения. Аппараты должны были перемещаться по грунту при помощи двух лыж, находящихся по бокам, немного приподнимающих аппарат над поверхностью. Такая система была выбрана из-за отсутствия в то время сведений о поверхности Марса.
Два тонких стержня впереди являются датчиками обнаружения препятствий на пути. Подвижный аппарат мог определить, с какой стороны находится препятствие, отступить от него и попытаться обойти.
Каждые 1,5 метра он делал бы остановки для подтверждения правильности курса движения. Этот элементарный искусственный интеллект был необходим для марсианских подвижных аппаратов поскольку сигнал от Земли до Марса идёт от 4 до 20 минут. Это слишком долго для подвижного устройства. К моменту прихода команд с Земли аппарат, возможно, уже вышел бы из строя.
Спускаемый аппарат Марс-2 разбился 27 ноября 1971 года при неудачной попытке мягкой посадки.
Спускаемый аппарат Марс-3 совершил мягкую посадку 2 декабря 1971 года, но сигнал с самой марсианской станции, к которой был подключён по кабелю марсоход, пропал через 14,5 секунд[1]. Информация с марсохода не была получена.
Соджорнер (англ. Sojourner) — с 4 июля по 27 сентября 1997 года (в рамках программы Mars Pathfinder, НАСА).
На поверхность Марса опустился 4 июля 1997 года, в составе спускаемого аппарата. Марсоход был рассчитан на 7-сольную (сол — марсиансие сутки) миссию, с возможностью расширения до 30 сол.[1] Несмотря на это, он работал в течение 83 сол, до того момента, как спускаемая станция Патфайндер, действовавшая в качестве ретранслятора, не вышла из строя (после чего Ровер не имел возможности общаться непосредственно с Землёй); последний контакт с ней состоялся в 10:23 UTC 27 сентября 1997 года.[2], вместе с этим связь оборвалась и с марсоходом, несмотря на то, что он находился в рабочем состоянии.[2] Место последней остановки марсохода до сих пор неизвестно, будущая камера Mars Geoscience Imaging at Centimeter-Scale (MAGIC), разрешение снимков которой составит 5 сантиметров на пиксель, поможет устранить этот пробел[3].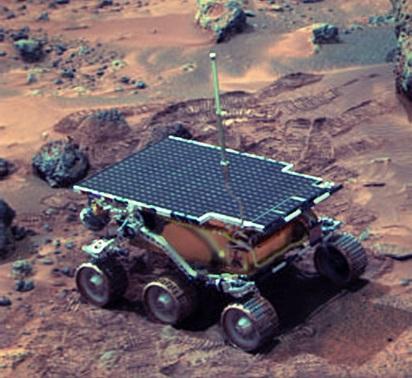
Всего Соджорнер преодолел дистанцию примерно в 100 метров[4] до потери связи.
Идентичные марсоходы программы Mars Exploration Rover, НАСА:
Спирит (англ. Spirit) — с января 2004 года по 22 марта 2010 года.
Оппортьюнити (англ. Opportunity) — с января 2004 года. На 26 января 2016 года в рабочем состоянии.
Кьюриосити (англ. Curiosity) — с 6 августа 2012 года. На 26 января 2016 года работает. (в рамках программы Mars Science Laboratory, НАСА).
«Спи́рит»[5], «Spirit» (с англ. — «дух»), или «MER-A» (сокр. от Mars Exploration Rover — A) — первый марсоходкосмического агентства НАСА из двух запущенных США в рамках проекта Mars Exploration Rover. 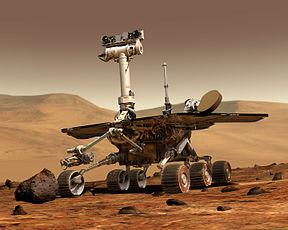
Старт миссии состоялся 10 июня 2003 года[6]. Спускаемый аппарат с марсоходом совершил мягкую посадку на Марс 4 января 2004 года за три недели до прибытия его близнеца «Оппортьюнити» (MER-B), который был успешно доставлен в другой район Марса, смещенный по долготе на примерно 180 градусов. В мае 2009 года марсоход застрял в песчаной дюне. Последняя связь с Землей была 22 марта 2010 года.
Марсоход работал гораздо дольше, чем запланированные 90 солов (марсианских солнечных суток). Благодаря очистке солнечных батарей естественным ветром Марса выработка электроэнергии значительно повысилась, из-за чего «Спирит» продолжал эффективно функционировать долгое время, в конечном итоге значительно превысив запланированный срок службы. «Спирит» проехал 7,73 км вместо запланированных 600 м, что позволило сделать более обширные анализы геологических пород Марса.
1 мая 2009 года (через 5 лет, 3 месяца, 27 земных суток после посадки, что в 21,6 раза больше, чем запланированные 90 солов), «Спирит» застрял в песчаной дюне. Это была не первая такая ситуация с роверами, и в течение последующих восьми месяцев НАСА тщательно её анализировало; выполнялось моделирование участка, программирование, продолжались усилия по освобождению. Эти усилия продолжались до 26 января 2010 года, когда НАСА объявило, что высвобождению марсохода препятствует его расположение в мягком грунте, хотя научные исследования данного места продолжались.
Ровер продолжали использовать как стационарную платформу, общение со «Спиритом» прекратилось на 2210 сол (22 марта 2010 года). JPL продолжала попытки восстановить контакт с ровером до 24 мая 2011 года, когда НАСА объявило, что усилия не принесли результатов, ровер молчал. Прощание со «Спиритом» состоялось в штаб-квартире НАСА и транслировалось на NASA TV.
Название марсоходу было дано в рамках традиционного конкурса НАСА 9-летней девочкой русского происхождения Софи Коллиз, родившейся в Сибири и удочерённой американской семьей из Аризоны[7].
«Оппортьюнити» (англ. Opportunity, МФА: «благоприятная возможность»), или MER-B (сокр. от Mars Exploration Rover — B') — второй марсоход космического агентства НАСА из двух запущенных США в рамках проекта Mars Exploration Rover.
Был выведен с помощью ракеты-носителя Дельта-2 7 июля 2003 года[8]. На поверхность Марсаопустился 25 января 2004 года тремя неделями позже первого марсохода Спирит, успешно доставленного в другой район Марса, смещенный по долготе примерно на 180 градусов[9]. «Оппортьюнити» совершил посадку в кратере Игл, наплато Меридиана.
Название марсоходу, в рамках традиционного конкурса НАСА, было дано 9-летней девочкой российского происхождения Софи Коллиз, родившейся в Сибири и удочерённой американской семьёй из Аризоны[10].
На сегодняшний день «Оппортьюнити» продолжает эффективно функционировать, уже более чем в 50 раз превысив запланированный срок в 90 сол[11][12], проехав к концу октября 2016 года 43,45 км[13][14], всё это время получая энергию только от солнечных батарей. Очистка солнечных панелей от пыли происходит за счёт естественного ветра Марса, что позволяет марсоходу производить геологические исследования планеты. В конце апреля 2010 года продолжительность миссии достигла 2246 сол, что сделало её самой длительной среди аппаратов, работавших на поверхности «красной планеты». Предыдущий рекорд принадлежал автоматической марсианской станции Викинг-1, проработавшей с 1976 по1982 год.
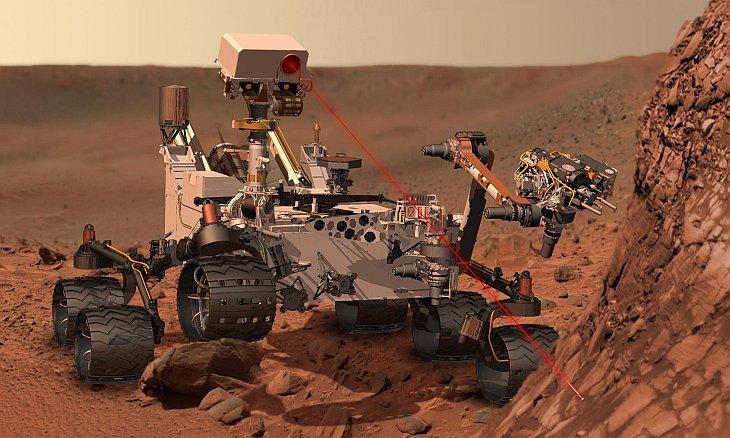
Марсианская научная лаборатория (МНЛ) (англ. Mars Science Laboratory, сокр. MSL), «Марс сайенс лэборатори» — миссия НАСА, в ходе выполнения которой на Марс был успешно доставлен и эксплуатируется марсоход третьего поколения «Кьюрио́сити» (англ. Curiosity, МФА — любопытство, любознательность[12]). 
Марсоход представляет собой автономную химическую лабораторию в несколько раз больше и тяжелее предыдущих марсоходов «Спирит» и «Оппортьюнити».
Аппарат должен будет за несколько месяцев пройти от 5 до 20 километров и провести полноценный анализ марсианских почв и компонентов атмосферы. Для выполнения контролируемой и более точной посадки использовались вспомогательные ракетные двигатели.
Запуск «Кьюриосити» к Марсу состоялся 26 ноября 2011 года,[14] мягкая посадка на поверхность Марса — 6 августа 2012 года. Предполагаемый срок службы на Марсе — один марсианский год (686 земных суток).
MSL — часть долговременной программы НАСА по исследованию Марса роботизированными зондами Mars Exploration Program. В проекте, помимо НАСА, участвуют также Калифорнийский технологический институт и Лаборатория реактивного движения. Руководитель проекта — Дуг Маккистион (Doug McCuistion), сотрудник НАСА из отдела изучения других планет. Полная стоимость проекта MSL составляет примерно 2,5 миллиарда долларов.
Специалисты американского космического агентства НАСА решили отправить марсоход в кратер Гейла. В огромной воронке хорошо просматриваются глубинные слои марсианского грунта, раскрывающие геологическую историю красной планеты.
Название «Кьюриосити» было выбрано в 2009 году среди вариантов, предложенных школьниками, путём голосования в сети Интернет. Среди других вариантов были Adventure («Приключение»), Amelia, Journey («Путешествие»),Perception («Восприятие»), Pursuit («Стремление»), Sunrise («Восход»), Vision («Ви́дение»), Wonder («Чудо»).
ОСНОВНЫЕ ОСОБЕННОСТИ КОНСТРУКЦИИ МАРСОХОДОВ
Шасси – предназначены для обеспечения марсоходу максимальной проходимости и маневренности на поверхности далекой планеты.
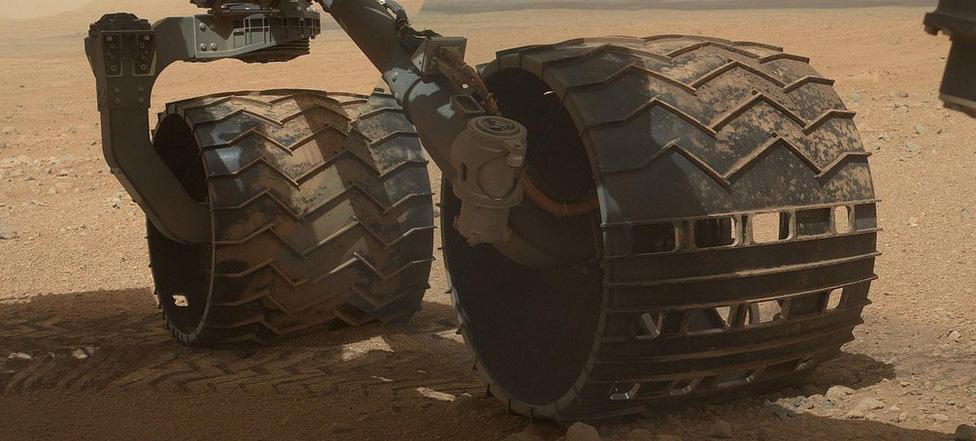
Всего у марсоходов Спирит, Опотьюнитии и Кьюриосити было по шесть колес, каждое из которых имеет возможность свободно вращаться и поворачивать.
Манипулятор – устройство, предназначенное для получения информации об окружающей марсоход среде. На манипуляторах размещены камеры, устройства для бурения с целью получения образцов почвы, другие датчики.
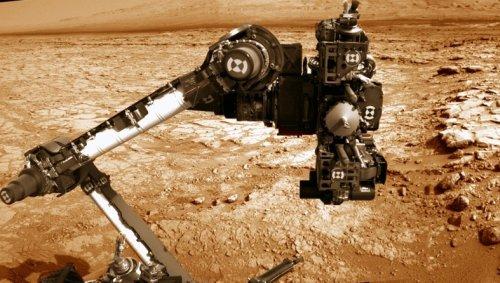
Камеры – устройства, предназначенные для получения изображений об окружающем марсоход.
Основываясь на этих основных моментах, я решил сделать собственную модель марсохода.
ГЛОССАРИЙ
Датчик — средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем. Датчики, выполненные на основе электронной техники, называются электронными датчиками. Отдельно взятый датчик может быть предназначен для измерения (контроля) и преобразования одной физической величины или одновременно нескольких физических величин.
В состав датчика входят чувствительные и преобразовательные элементы. Основными характеристиками электронных датчиков являются чувствительность и погрешность.
Датчики широко используются в научных исследованиях, испытаниях, контроле качества, телеметрии, системах автоматизированного управления и в других областях деятельности и системах, где требуется получение измерительной информации.
Марс — четвёртая по удалённости от Солнца и седьмая по размерам планета Солнечной системы; масса планеты составляет 10,7 % массы Земли. Названа в честь Марса — древнеримского бога войны, соответствующего древнегреческому Аресу. Иногда Марс называют «красной планетой» из-за красноватого оттенка поверхности, придаваемого ей оксидом железа.
Марс — планета земной группы с разреженной атмосферой (давление у поверхности в 160 раз меньше земного). Особенностями поверхностного рельефа Марса можно считать ударные кратеры наподобие лунных, а также вулканы, долины, пустыни и полярные ледниковые шапки наподобие земных.
У Марса есть два естественных спутника — Фобос и Деймос (в переводе с древнегреческого — «страх» и «ужас», имена двух сыновей Ареса, сопровождавших его в бою), которые относительно малы (Фобос — 26,8×22,4×18,4 км, Деймос — 15×12,2×10,4 км)[6][7] и имеют неправильную форму.
Марсохо́д — планетоход, передвигающийся по поверхности Марса. Мягкая посадка марсоходов осуществляется с помощью спускаемых аппаратов.
Миссия –(англ. mission) — основная цель организации, смысл её существования. Миссия — одно из основополагающих понятий стратегического управления. Разные учёные давали различные формулировки миссии.
Робот (чеш. robot, от robota — «подневольный труд») — автоматическое устройство, созданное по принципу живого организма, предназначенное для осуществления производственных и других операций, которое действует по заранее заложенной программе и получает информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком. При этом робот может как иметь связь с оператором (получать от него команды), так и действовать автономно.
Внешний вид и конструкция современных роботов могут быть весьма разнообразными. В промышленном производстве широко применяются различные роботы, внешний вид которых (по причинам технического и экономического характера) далёк от «человеческого».
Термин «роботы» используют также применительно к некоторым интеллектуальным агентам — программам, примерами которых могут служить, например, боты или поисковые роботы.
Солнечная батарея — несколько объединённых фотоэлектрических преобразователей (фотоэлементов) — полупроводниковых устройств, прямо преобразующих солнечную энергию в постоянный электрический ток, в отличие от солнечных коллекторов, производящих нагрев материала-теплоносителя.
Различные устройства, позволяющие преобразовывать солнечное излучение в тепловую и электрическую энергию, являются объектом исследования гелиоэнергетики (от гелиос греч. Ήλιος, Helios — Солнце). Производство фотоэлектрических элементов и солнечных коллекторов развивается в разных направлениях. Солнечные батареи бывают различного размера: от встраиваемых в микрокалькуляторы до занимающих крыши автомобилей и зданий.
Сервомотор – это специальный электрический двигатель с отрицательной обратной связью, предназначенный для использования в станках с числовым программным управлением. Серводвигатели обладают высокими скоростными характеристиками, и точностью позиционирования
Спускаемый аппарат (СА) — космический аппарат или часть космического аппарата, предназначенный для спуска полезной нагрузки с орбиты искусственного спутника или с межпланетной траектории и мягкой посадки на поверхность Земли либо другого небесного тела
Дистанционное управление (ДУ) — передача управляющего воздействия (сигнала) от оператора к объекту управления, находящемуся на расстоянии, из-за невозможности передать сигнал напрямую, если объект движется, находится на значительном расстоянии или в агрессивной среде и т. п
Шасси - законченная конструкция, которую можно передвигать на собственных колёсах или гусеницах. Рамные шасси применяют главным образом у тракторов и грузовых автомобилей. Устройство рамного шасси зависит от применяемого движителя. У колёсных машин конструкция шасси определяется общим числом осей и числом ведущих осей. Шасси машин, предназначенное для движения в условиях бездорожья, оборудуется средствами повышения проходимости.
Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

