, Нерюнгри


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 05.11.2024 06:09

Жирохова Надежда Афанасьевна
преподаватель спец дисциплин
34 года
Местоположение
Основы автоматизации
Категория:
Прочее
27.09.2024 09:03

Просмотр содержимого документа
«Основы автоматизации»
Лекция _1
Автоматика – это отрасль науки и техники об управлении различными процессами и контроле их протекания, осуществляемыми без непосредственного участия человека.
Современное производство – непрерывное поточное производство, высокая скорость протекания процессов. Все это требует быстродействия, точности и объективности управления т управлять такими процессами для человека становиться все более сложно.
В ряде отраслей появились процессы (радиоактивный распад, электромагнитные излучения, сверхнизкие и сверхвысокие температуры и т.п.), т.е. вредные воздействия на человека.
Кроме этого, на производстве еще достаточно много тяжелого ручного труда, который надо заменить на более легкий. Именно автоматизация технологических процессов позволяет выполнить задачи по защите человека и облегчения его труда.
Надо различать:
механизация – замена ручного труда энергией машин, при этом функции управления этими машинами остаются за человеком;
автоматизация – замена функций управления технологическими процессами и контроль за их протеканием без участия человека.
В зависимости от характера и объема операций, выполняемых автоматическими устройствами (совокупностью устройств) различают следующие виды автоматических систем:
контроля;
блокировки;
защиты;
сигнализации;
регулирования; - управлению.
Системы контроля служат для автоматического получения и обработки информации о значениях контролируемых параметров. Контроль может быть непрерывным и дискретным.
Системы блокировки служат для фиксации механизма или устройства в определенном положении в процессе их работы. Эти системы увеличивают безопасность обслуживания и надежности работы оборудования.
Системы защиты прекращают технологический процесс при возникновении отклонений контролируемых параметров при перегрузках, коротких замыканиях и т.п.
Системы сигнализации извещают персонал о ходе технологического процесса при возможных допустимых отклонениях контролируемых параметров за допустимые пределы.
Системы регулирования обеспечивают поддержание значений регулируемой величины (параметра) в заданных пределах или по заданному закону.
Все эти системы могут быть самостоятельными или являться составной частью системы автоматического управления.
Системы управления – это автоматические системы, в которых технологический процесс или какой – либо объект управляются с помощью управляющих сигналов.
ЛЕКЦИЯ 2 Элементы автоматических системЛюбая автоматическая система состоит из отдельных, связанных между собой конструктивных элементов.
Рисунок 1
ОУ - Объект (контроля, регулирования, управления и т.п.) –– устройство или совокупность устройств, у которых регулируются, контролируются или управляются один или несколько параметров.
УУ – Устройство управления (управляющее устройство) – техническое устройство, воздействующее на объект управления в соответствии с программой управления.
ИУ – Исполнительное устройство создает управляющее воздействие на объект управления.
ЗУ – Задающее устройство (элемент настройки) – служит для задания требуемого значения регулируемой величины.
Д – Датчик (воспринимающее устройство, первичный преобразователь, датчик обратной связи) – измеряет управляемые величины и, при необходимости, преобразует их в другие, для удобства передачи, обработки или хранения контролируемых параметров.
СУ – Сравнивающее устройство – сравнивает заданное значение регулируемой величины с ее действительным значением на выходе объекта управления. Полученная разность сигналов называется сигналом рассогласования или сигналом ошибки.
Вспомогательные устройства – переключают, защищают, сигнализируют, усиливают элементы схемы и сигналы в них для улучшения качества процесса регулирования, управления, контроля и т.п.
Любой процесс управления в каждый элемент времени характеризуется одним или несколькими показателями, которые отражают физическое состояние объекта (температура, давление, напряжение и т.п.). Эти показатели могут изменяться по определенному закону (алгоритму) или оставаться постоянной. Такие показатели называются регулируемыми параметрами управляемого процесса.
Рисунок 2
Для нормального (заданного) протекания технологического процесса на вход системы автоматики по определенному алгоритму подаются задающие (внешние) воздействия.
Для выполнения функции управления между УУ и ОУ действуют управляющие (внутренние) воздействия.
Однако в реальных системах на объект могут действовать заранее не планируемые воздействия (помехи), которые затрудняют процесс управления. Они называются возмущающими воздействиями. Иногда на один объект может действовать несколько возмущающих воздействий.
Для возможности контроля параметров объекта управления и для улучшения характеристик систем автоматики предусматривают линии обратной связи.
Линии обратной связи – это линии связи, по которым информация передается в обратном направлении по сравнению с управляющими воздействиями.
В автоматических системах используются следующие виды обратной связи:
положительная обратная связь – знак сигнала обратной связи и задающего воздействия совпадают;
отрицательная обратная связь - знак сигнала обратной связи и задающего воздействия не совпадают;
жесткая обратная связь - передаваемое воздействие зависит только от регулируемого параметра и не зависит от времени (работает постоянно); - гибкая обратная связь – действует только в переходном периоде, т.е.
существует только тогда, когда управляемая величина изменяется во времени;
главная обратная связь – соединяет выход системы автоматики с ее входом,
т.е. связывает управляемую величину с задающей величиной от задающего устройства;
дополнительная обратная связь – передает сигнал воздействия с выхода какого-либо элемента системы (например, усилителя) на вход любого предыдущего элемента для улучшения характеристики отдельных элементов системы.
Системы автоматики состоят из ряда связанных между собой элементов. Каждый элемент имеет свои физические свойства, которые определяются рядом характеристик и параметров.
В зависимости от характеристик элементов вся система также будет обладать своей характеристикой. Поэтому, зная характеристики отдельных элементов системы, мы сможем представить, как будет работать данная система.
Режим работы элемента (системы) при постоянных во времени входной и выходной величинах называют статическим (установившимся) режимом, т.е. в этом режиме:
Хвх (t) = const; Хвых (t) = const
Функциональная зависимость Хвх от Хвых в установившемся режиме называется статической характеристикой
Хвых = f (Хвх)
Для элементов автоматики основным является режим работы, при котором Хвх и Хвых не остаются постоянными. Такой режим работы называется динамическим.
Процесс перехода из одного установившегося состояния в другое установившееся состояние называется переходным процессом. Он является частным случаем динамического режима.
Для оценки работы системы автоматики в переходом процессе служат динамические характеристики:
Переходная характеристика – это временная характеристика, показывающая изменение во времени выходной величины Хвых, вызванное подачей на вход системы автоматики единичного скачка Хвх. Единичным скачком Хвх называется изменение входной величины, например на 10, 1А. 1м.
Эта характеристика дает возможность определить, как поведет себя система автоматики (элемент) при любом воздействии на ее вход.
Передаточная характеристика показывает зависимость изменения во времени выходной величины (Хвых) от входной величины (Хвх) в переходном режиме при нулевых начальных условиях. Нулевые начальные условия – перед началом работы все параметры системы равны нулю.
Хвых (t) = f ( Хвх (t)
Частотные характеристики – показывает изменение входной величины Хвых при изменении частоты входного сигнала Хвх. Различают амплитудно-частотную и фазо-частотную характеристики.
Хвых = f (ω)
Коэффициент передачи элемента – представляет собой отношение выходной величины Хвых элемента к входной величине Хвх. В зависимости от режима работы, в котором определяется коэффициент передачи элемента, различают:
Статический коэффициент передачи Кст = Хвых / Хвх
Динамический коэффициент передачи – показывает во сколько раз приращение выходного сигнала Δ Хвых увеличится или уменьшится при приращении входного сигнала Δ Хвх
Кдин = Δ Хвх / Δ Хвых
Относительный коэффициент передачи показывает отношение относительного приращения выходного сигнала Хвых к относительному приращению входного сигнала Хвх
Котн = (Δ Хвых / Хвых) / (Δ Хвх / Хвх)
Порог чувствительности это наименьшее (по абсолютному значению) значение входного сигнала, способное вызвать изменение выходного сигнала. Интервал между значением входного сигнала, не оказывающего воздействия на значение выходного сигнала, и значением входного сигнала, оказывающего воздействие на значение выходного сигнала, называется зоной чувствительности.
ЛЕКЦИЯ 4 ДатчикиВ системах автоматики датчик предназначен для измерения и преобразования контролируемой или регулируемой величины объекта в выходной сигнал, более удобный для дальнейшего движения информации, ее хранения и обработки.
Поэтому датчики нередко называют первичными преобразователями.
Датчики являются наиболее широко распространенными элементами любой системы автоматики.
Условия работы датчиков, как правило, более тяжелые, чем у остальных элементов, т.к. они расположены непосредственно на объекте управления и подвергаются воздействию агрессивных сред, ударов, вибрации и т.п. В этих условиях к датчикам предъявляются жесткие требования по точности и стабильности преобразования.
Классификация датчиковВ зависимости от принципа действия датчики делятся на:
параметрические (модуляторы); - генераторные
По виду входного сигнала различают датчики:
уровня;
давления;
температуры;
скорости и т.п.
По виду входного сигнала датчики могут быть:
аналоговыми;
дискретными;
линейными;
нелинейными
Параметрические (модуляторы) – это такие датчики, у которых изменение входной величины датчика вызывает изменение какого – либо параметра самого датчика (R, L, C и т.п.)
Генераторными называются такие датчики, у которых изменение входной величины датчика вызывает генерацию (появление, создание) электрического сигнала на его выходе. Эти датчики не требуют вспомогательного источника энергии.
Аналоговые датчики это такие датчики, у которых либо входной сигнал, либо сигнал на выходе, либо оба сигнала являются аналоговым.
У дискретных датчиков оба сигнала, или хотя бы один сигнал на входе или на выходе является дискретным (импульсным, цифровым и т.п.)
Линейные датчики – выходная величина изменяется пропорционально изменению входной величины.
Нелинейные датчики – выходная величина изменяется нелинейно относительно изменению входной величины.
Схемы включения датчиковДля подключения датчиков в системы автоматики используются следующие виды схем:
мостовая;
компенсационная;
дифференциальная
Мостовая схема включения датчиков )
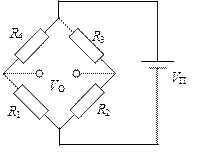
Схема используется для преобразования изменения параметров датчика (R, L, C) в изменение тока или напряжения в цепи.
Мостовой называется схема, которая состоит из четырех и более плеч (Z1, Z2, Z3, Z4) и двух диагоналей – питания (ac) и измерительной (bd).
Если Z1 * Z3 = Z2 * Z4, то мостовая схема называется уравновешенной и ток по измерительной диагонали не течет (РА = 0). Если равенство не выполняется, то по измерительной диагонали протекает ток.
Датчик устанавливается в одно из плеч мостовой схемы (например, Z1).
В системах автоматики применяют два вида мостовых схем включения датчиков:
балансная (равновесная);
небалансная (неравновесная)
Для изменения характеристик датчиков они могут включаться в состав устройств предварительной обработки сигналов. Например, требуется получить реверсивную характеристику датчика с нереверсивным чувствительным элементом. Чаще всего такие устройства имеют мостовую схему. Свойства мостовых схем рассмотрим на примере резистивных датчиков, у которых входное воздействие изменяет сопротивление резисторов. На рис. изображена мостовая схема, в плечи которых включены резисторы R1…R4. На одну диагональ моста подаётся напряжение VП.
Выходное напряжение VО снимается с другой диагонали.
Балансная схема предусматривает нулевой метод измерения – по измерительной диагонали ток не течет. Такая схема чаще применяется в системах управления, т.к. при изменении параметра датчика (Z1) необходимо изменить сопротивление любого из плеч, чтобы ток в измерительной цепи не протекал.
Неравновесная схема – это такая схема, у которой при изменении параметра датчика по измерительной диагонали течет ток, величина которого пропорциональна этому изменению. Такие схемы часто применяются в схемах автоматического контроля (без обратной связи).

Если R1/R4 = R2/R3, то VО=0. Такое состояние моста называют сбалансированным. Обычно для балансировки моста выбирают R1=R2=R3=R4=R. Если некоторые резисторы – чувствительные элементы, т.е. их сопротивление (R±ΔR) изменяется под действием внешних воздействий. Баланс моста нарушается и по величине выходного напряжения VО можно судить о величине этого воздействия.
Компенсационная схема
Принцип компенсации заключается в том, что измеряемую эдс (или напряжение), поступающую от датчика, уравновешивают равным и противоположным по знаку падением напряжения, значение которого известно с высокой точностью.
Дифференциальная схема
Схема представляет собой электрическую цепь, состоящую из двух смежных контуров, в каждом из которых действует отдельная эдс. Измерительный прибор Р включен в общую для обоих контуров цепь и реагирует на разность контурных токов.
В автоматических системах могут быть использованы следующие режимы работы дифференциальных схем:
а) при неизменных сопротивлениях обоих контуров одна из Е изменяется на величину ΔЕ
б) при неизменных сопротивлениях обоих контуров обе Е1 и Е2 изменяются на величину ΔЕ;
в) при неизменных Е1 и Е2 изменяется сопротивление Z одного из контуров;
г) при неизменных Е1 и Е2 изменяются сопротивления Z1 и Z2 обоих контуров.
Достоинство этих схем: чувствительность по току при большом сопротивлении выше, чем у мостовой схемы.
Потенциометрические датчикиПреобразуют перемещение чувствительного элемента (подвижного контакта) в изменение электрического сопротивления самого датчика (рис.6) Различают датчики:
с угловым перемещением (кольцевые и секторные) – рис.6б и 6в; - с линейным перемещением (прямоугольные) – 7а.
В зависимости от конструкции реохорда датчики могут быть:
линейными – выходная величина датчика пропорциональна входной величине, т.к. сечение каркаса датчика, диаметр проволоки, шаг намотки одинаковы по всей длине;
функциональными – обладают нелинейной характеристикой, т.к. каркас, шаг намотки или диаметр проволоки по длине датчика не одинаковы (с.8, рис. 59).
Недостатки датчиков:
наличие подвижного контакта;
трудность получения линейной характеристики; - наличие вспомогательного источника питания.
Достоинства:
простая конструкция;
не требует усиления сигнала на выходе датчика.
Принцип действия индуктивных датчиков основан на зависимости индуктивного сопротивления катушки индуктивности от:
изменения зазора в магнитопроводе (рис.8а) – перемещение до 2мм;
перемещения магнитопровода в катушке (рис. 8б) – перемещение до 50мм;
изменения площади зазора между катушкой и сердечником (рис.8в) – перемещение до 8мм.
Достоинства:
неограниченный срок службы;
большая мощность выходного сигнала;
высокая надежность;
отсутствие подвижных контактов.
Недостатки:
небольшой диапазон перемещения;
наличие холостого тока;
влияние колебаний амплитуды и частоты напряжения питания; - наличие вспомогательного источника питания.
Трансформаторный датчик (индуктивный преобразователь)
Трансформаторные датчики имеют на своем выходе взаимоиндуктивность и поэтому они относятся к группе индуктивных датчиков.
Катушка датчика (с.2, рис 9) изготовлена в виде рамки, пронизываемой переменным магнитным потоком, который создается обмоткой возбуждения, подключенной к источнику стабилизированного напряжения стандартной частоты. При повороте катушки изменяется значение пронизывающего ее магнитного потока, а, следовательно, и индуктированной эдс. С помощью формы полюсных наконечников можно получить прямолинейную статическую характеристику при повороте рамки на ±70о. Соединяя механической связью ось рамки с осью стрелки показывающего прибора, можно преобразовать поворот рамки в показания прибора.
Индуктивные датчики применяются в системах автоматики и телемеханики для измерения линейных и угловых перемещений.
Емкостные датчикиСлужат для преобразования неэлектрической величины
перемещение;
влажность;
уровень вещества; - усилие и т.п.
в изменение электрической емкости.
Чувствительным элементом является конденсатор, у которого при воздействии измеряемого параметра изменяется:
С =ξs/d
а) расстояние между пластинами (d);
б) рабочая площадь пластин (s);
в) диэлектрическая проницаемость среды между обкладками (ξ )
Достоинства:
простые по устройству;
имеют малые размеры и массу;
обладают высокой чувствительностью
Недостатки:
малая мощность выходного сигнала;
влияние внешних магнитных полей;
необходимость высокочастотного источника питания, т.к. на низких частотах нельзя получить выходной сигнал большой мощности.
Работа тензометрического датчика основана на изменении электрического сопротивления проводников при их растяжении или сжатии.
R = ρl/s
В зависимости от материала чувствительного элемента тензорезисторы подразделяются на:
проволочные; - фольговые;
полупроводниковые.
Проволочные тензодатчики изготавливаются в виде проволоки из нихрома, фехраля, константана диаметром 0,015 – 0.05 мм Достоинства:
простые по конструкции;
дешевые;
имеют линейную статическую характеристику;
малый вес;
Недостатки:
низкая чувствительность;
подвержены влиянию влаги и температуры;
Фольговые тензодатчики изготавливаются из фольги шириной 4 – 12 мм, вырезанной из константана, нихрома или золото – серебряных сплавов.
Достоинства:
высокая чувствительность;
высокая точность;
хороший механический контакт; - возможность пропустить большой ток.
Полупроводниковые тензометрические датчики изготавливаются из германия, кремния, галия и т.п. В этих датчиках при изменении сопротивления изменяется их удельная проводимость.
Достоинства:
высокая чувствительность;
большая мощность выходного сигнала.
Недостатки:
большой разброс параметров (трудно сделать датчики с одинаковыми параметрами);
хрупкие.
Все тензометрические датчики помещены в специальные пакеты, чаще из бумаги и во время опыта приклеиваются на испытуемый образец.
Такие датчики обладают одним общим недостатком - одноразовые, т.к. после растяжения или сжатия не возвращают прежние характеристики.
Применение:
для контроля за деформациями и напряжениями при статических и динамических нагрузках;
для измерения крутящих и изгибающих моментов, возникающих на поверхности механизмов при их механической нагрузке.
Сельсины представляют собой индукционные электрические машины, которые предназначены для передачи на расстояние угловых перемещений двух или нескольких валов, механически не связанных друг с другом.
Обычно сельсины работают в паре. Сельсин, связанный с ведомым валом называется сельсином – датчиком (СД), а сельсин, связанный с ведомым валом – сельсином – приемником (СП).
Каждый сельсин состоит из двух обмоток. Однофазная обмотка (ОВ) расположена на статоре, а трехфазная обмотка уложена в пазы ротора и соединена в звезду.
ЛЕКЦИЯ 5 Переключающие устройстваК переключающим устройствам автоматики относятся:
реле;
контактные и бесконтактные устройства управления.
Реле – это коммутационное устройство, которое при воздействии каких – либо внешних факторов скачкообразно изменяет свое состояние.
По назначению реле бывают:
управления (управляют электродвигателями, электромагнитными
тормозами и т.п.);
защиты (для включения и отключения аппаратов защиты, в схемах
релейной защиты и т.п.)
автоматики;
По характеру входной величины реле делятся на:
электрические;
оптические;
тепловые;
механические;
акустические и т.п
Электрические реле служат для включения и отключения электрических цепей, размножения контактов, блокировки, памяти и т.д. Электрические реле различают по принципу действия
электромагнитные;
магнитоэлектрические;
электронные; - статические;
электротепловые.
по способу коммутации:
контактные;
бесконтактные
Рассмотрим некоторые из реле.
электрические реле, их устройство, принцип действия и назначение рассматриваются в дисциплине «Электрические аппараты»
реле на магнитоуправляемых контактах –герконовые реле
реле на шаговых искателях;
электронные и электродвигательные реле времени;
Герконовые реле
Геркон представляет собой стеклянный баллон,с вакуумом или азотом (аргоном) внутри, в который впаяны контактные пластины из магнитомягкого материала.
Герконовое реле состоит из геркона который размещается внутри электромагнита или в поле постоянного магнита. При подаче тока в обмотку электромагнита возникает магнитный поток, который намагничивает контактные пружины Между ними возникает электромагнитная сила и контакты замыкаются.
Достоинства:
повышенная надежность;
большее быстродействие; - малая зона нечувствительности.
Недостатки:
небольшая мощность;
влияние внешних полей, вызывающее ложное срабатывание.
Применение:
термоэлектрические реле– биметаллический контакт , нагреваясь, изменяет положение постоянного магнита , приближая его к геркону;
реле давления – сильфон, а вместе с ним и постоянный магнит, приближается к геркону;
реле скорости – вращающийся диск из ферромагнитного материала с прорезями располагается между постоянным магнитом и герконом. Контакты геркона срабатывают, когда прорезь диска оказывается между герконом и магнитом;
клавиатура в микропроцессорной технике (устаревшее).
Реле на шаговых искателях
Шаговый искатель – электромагнитный импульсный переключатель, предназначенный для поочередной коммутации большого числа цепей.
Реле счета импульсов Служит для создания сигнала на выходе схемы через заданное число импульсов, поступающих на вход этой схемы. Реле времени
Реле времени – устройство, предназначенное для получения заданной выдержки времени при включении или выключении цепей управления.
Для получения сравнительно небольшой выдержки времени применяют схемы замедления с использованием реактивных элементов (конденсаторов, диодов, транзисторов)
Для создания больших выдержках времени применяют электромагнитные, электронные, электродвигательные и другие реле.
Контактные и бесконтактные устройства управленияДля коммутации силовых цепей и цепей управления (включения, выключения и переключения) применяют различные контактные (электромеханические) и бесконтактные аппараты. Они могут быть ручными и автоматическими.
Контактные устройства управления (реле, кнопки, контакторы) обладают следующими недостатками:
при частом переключении их подвижные контакты недолговечны;
большое время срабатывания;
контакты требуют частых профилактических осмотров, регулировок и замены.
Задающие устройства служат для задания требуемого (регулируемого) параметра. Они могут быть аналоговыми или дискретными (цифровыми). По роду энергии вырабатываемых сигналов, задающие устройства делятся на электрические, пневматические, гидравлические, механические.
Задающее устройство состоит из носителя программы, привода и элемента настройки. В некоторых конструкциях задающих устройств эти элементы могут быть объединены.
В качестве носителей программы используют:
механические устройства – кулачки и функциональные потенциометры рычажные механизмы;
перфокарты;
магнитные ленты;
оптические носители (фотопленка).
в качестве постоянных носителей программы используют шаговые искатели, бесконтактные устройства и т.п.
В качестве приводов задающих устройств используют синхронные электродвигатели, часовые механизмы, шаговые двигатели.
ЛЕКЦИЯ 6 Классификация систем автоматикиВ зависимости от выполняемых функций системы автоматики делятся на:
контроля (САК);
блокировки (САБ);
защиты (САЗ);
сигнализации (САС);
регулирования (САР); - управления (САУ).
По виду применяемой энергии системы автоматики делятся на:
электрические; - механические; - пневматические и др.
По характеру воздействия одних устройств на другие системы автоматики делятся на:
непрерывные – непрерывному изменению значения входной величины системы соответствует непрерывное изменение значения выходной величины;
дискретные – непрерывному изменению значения входной величины хотя бы одного элемента, входящего в систему, соответствует прерывистое изменение выходной величины этого элемента.
Системы автоматического контроля (САК).
Служат для получения и обработки информации о значении контролируемого параметра и сравнения его с заданным.
Контроль может быть:
непрерывным или дискретным;
самостоятельным или входить в состав системы управоения
технологическим процессом;
местным или дистанционным;
пассивным или активным;
единичного или множественного действия.
Типовым динамическим звеном САУ является составная часть системы, которая описывается дифференциальным уравнением не выше второго порядка. Звено, как правило, имеет один вход и один выход. По динамическим свойствам типовые звенья делятся на следующиещщш разновидности: позиционные, дифференцирующие и интегрирующие.
Позиционными звеньями являются такие звенья, у которых в установившемся режиме наблюдается линейная зависимость между входными и выходными сигналами. При постоянном уровне входного сигнала сигнал на выходе также стремится к постоянному значению.
Дифференцирующими являются такие звенья, у которых в установившемся режиме выходной сигнал пропорционален производной по времени от входного сигнала.
Интегрирующими являются такие звенья, у которых выходной сигнал пропорционален интегралу по времени от входного сигнала.
Звено считается заданным и определенным, если известна его передаточная функция или дифференциальное уравнение. Кроме того, звенья имеют временные и частотные характеристики.
Наличие нулевых корней в числителе или знаменателе ПФ типовых звеньев - это признак для разбиения последних на три группы:
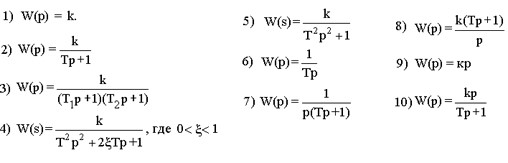
Позиционные звенья: 1, 2, 3, 4, 5, - не имеют нулевых корней, и, следовательно, в области низких частот (т.е. в установившемся режиме), имеют коэффициент передачи равный k.
Интегрирующие звенья: 6, 7, 8, - имеют нулевой корень-полюс, и, следовательно, в области низких частот, имеют коэффициент передачи, стремящийся к бесконечности.
Дифференцирующие звенья: 9, 10 - имеют нулевой корень-ноль, и, следовательно, в области низких частот, имеют коэффициент передачи, стремящийся к нулю.
ЛЕКЦИЯ 8 Общее понятие устойчивости сар
В реальных условиях САР не может все время оставаться в установившемся режиме, потому что на нѐе все время действуют внешние возмущения, которые стремятся изменить значение регулируемого параметра. Автоматический регулятор стремится привести значение регулируемого параметра к заданному. В результате наличия инерционных масс и емкостей переход автоматического регулятора, т. е. всей системы в целом, осуществляется не мгновенно, а спустя некоторое время. При этом в системе возникают переходные процессы, которые зависят от ее характеристик.
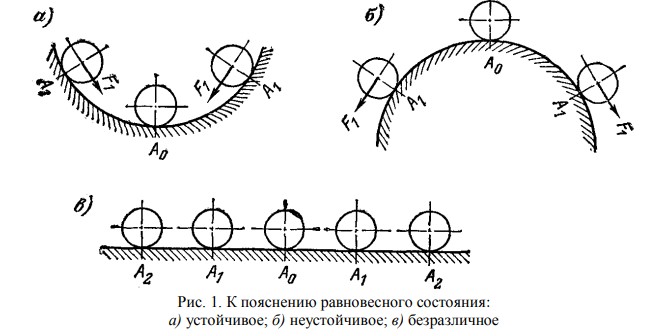
Следует заметить, что исследование установившегося режима дает возможность решить вопрос о пригодности САР для проведения какого-либо процесса с заданной точностью. Однако для практического использования этого недостаточно. Система должна быть также устойчивой по отношению к внешним возмущениям. Пригодность любой САР в первую очередь определяется устойчивостью и приемлемым качеством процесса регулирования. Устойчивостью называется способность системы возвращаться к заданному установившемуся состоянию после приложения или снятия внешнего возмущения. Известно, что каждый из установившихся режимов работы САР представляет собой равновесное состояние. Для решения вопроса, устойчиво ли равновесие какой- либо статической системы, необходимо изучить поведение этой системы при небольших отклонениях от положения равновесия. Различают три вида равновесных состояний: устойчивое, неустойчивое и безразличное. На рис. 1, а приведен пример устойчивого равновесного состояния. При любом малом отклонении шарика от исходного положения А0 влево или вправо в положение А1 появляется сила F1, которая стремится вернуть шарик в первоначальное положение. Пример неустойчивого равновесного состояния приведен на рис. 1, б. Предположим, что шарик лежит на возвышении. После отклонения его от равновесного состояния А0 шарик не вернется в исходное положение, так как возникающая сила F1 стремится еще больше отклонить его от положения равновесия.
На рис. 1, в приведен пример безразличного равновесного состояния. Предположим, что шарик находится на плоскости. После отклонения его от равновесного состояния А0 шарик займет одно из новых равновесных состояний (А1 А2, ..., Аn). В этом случае шарик может иметь бесчисленное множество равновесных состояний. Рассмотренные равновесные состояния можно распространить и на САР. В САР применяются автоматические регуляторы, которые обладают устойчивыми установившимися режимами работы. Установившийся режим работы САР является устойчивым, если система, будучи выведенная из состояния равновесия, после снятия возмущения вновь возвращается в устойчивое равновесное состояние. Установившиеся режимы необходимо рассматривать при постоянной нагрузке и настройке.
ЛЕКЦИЯ 9 Переходные процессы САРПри переходе системы из одного установившегося режима работы в другой возникает переходный процесс, после которого система может оказаться либо устойчивой, либо неустойчивой. Чтобы определить это, необходимо произвести исследование динамики процесса регулирования, т. е. определить закон изменения регулируемого параметра в функции времени при воздействии на САР возмущающих факторов. В общем случае значение регулируемого параметра в неустановившемся режиме в каждый момент времени определяется: у = уУСТ + уПРХ (1) где уУСТ — установившееся значение регулируемого параметра; уПХР — изменение регулируемого параметра, изменяющаяся во времени в течение переходного процесса. Если уПРХ стремится к нулю даже за неограниченно большой отрезок времени, то САР будет устойчивой. Если с течением времени уПРХ не стремится к нулю, то САР будет неустойчивой. Рассмотрим несколько примеров переходных процессов
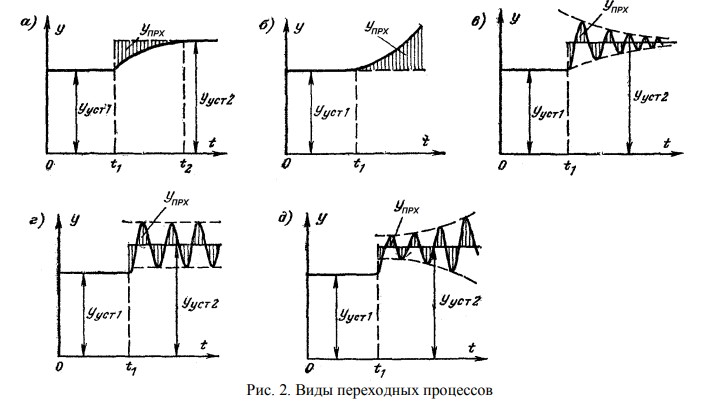
Пример 1. На рис. 2, а показан переходный процесс устойчивой САР. В течение переходного процесса регулируемый параметр «у» монотонно приближается к новому установившемуся значению уУСТ2, при этом уПРХ →0, т. е. происходит уменьшение ординаты уПРХ. Т.о. переходный процесс имеет затухающий характер, а сама САР является устойчивой. Пример 2. На рис. 2,б показан переходный процесс неустойчивой САР. Начиная с момента t = t1, переходный процесс имеет расходящийся характер и с течением времени уПРХ не стремится к нулю, а возрастает монотонно. Поэтому САР неустойчива. Монотонные переходные процессы в двух рассмотренных примерах называются также апериодическими переходными процессами. Пример 3. На рис. 2,в показан переходный процесс протекает, в котором система, совершив несколько колебаний около нового установившегося значения регулируемого параметра уУСТ2, приходит к установившемуся режиму работы. В этом случае уПРХ изменяется как по абсолютному значению, так и по знаку. Автоматическая система регулирования является устойчивой, т.к. с течением времени уПРХ→0. Пример 4. На рис. 2,г в переходном процессе САР совершает незатухающие колебания около нового установившегося значения регулируемого параметра уУСТ2. Такая система является нейтрально устойчивой или находящейся на границе устойчивости. Пример 5. На рис. 2,д в САР, выведенной из установившегося режима, происходит расходящийся колебательный процесс около нового значения регулируемого параметра уУСТ2. При этом амплитуда уПРХ все время возрастает. Система неустойчива, так как уПРХ не стремится к нулю.
Переходные процессы на рис. 2,в—д являются колебательными.
ЛЕКЦИЯ 10 Качество процесса регулированияУстойчивость или неустойчивость характеризует только факт наличия или отсутствия затухания переходного процесса в САР. Устойчивость САР является основным, но недостаточным условием для применения САР на практике. Так, затухание переходного процесса в САР может происходить быстро или медленно, с большими или малыми отклонениями регулируемого параметра от заданного значения; кроме того, переходный процесс может быть апериодическим или колебательным. Для исследования САР введено понятие качества процесса регулирования. Первой стороной качества процесса регулирования является степень поддержания регулируемого параметра, когда на САР не воздействуют внешние возмущающие факторы. Второй стороной качества процесса регулирования является вид переходных процессов, которые возникают при воздействии внешних возмущающих факторов.
Для оценки качества процесса регулирования используют следующие показатели:
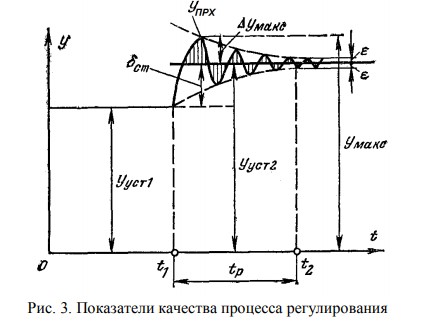
Статическая ошибка δСТ — отклонение регулируемого параметра от заданного значения после окончания переходного процесса. Статическая ошибка определяется: δСТ = уУСТ2 - уУСТ1 (2)
Длительно допустимое отклонение регулируемого параметра от нормы - ε.
Перерегулирование (выброс) — максимальное отклонение регулируемого параметра от установившегося значения: ΔуМАКС = уМАКС - уУСТ2 (3)
Обычно перерегулирование выражается в процентах, и значение его для современных САР колеблется от 2 до 10%. 4) Время регулирования tP — продолжительность переходного процесса. Переходный процесс теоретически считается законченным, если уПЕР(t) становится меньше ε = 3 – 5 % нового установившегося значения регулируемого параметра уУСТ2.
Время регулирования характеризует быстродействие САР, которое зависит от вида, числа и характера включения элементов. 5) Число колебаний регулируемого параметра в течение времени переходного процесса tP






Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

