




© 2020 1934 122


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до 20.06.2025
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Устройство робота
Категория:
Информатика
20.02.2020 19:46

Просмотр содержимого документа
«Устройство робота»

- Принципы управления роботами
1 . Управление с прямой связью
2 . Управление с обратной связью
Прямая связь
Управляющий объект
Объект управления
Прямая связь
Управляющий объект
Объект управления
Обратная связь

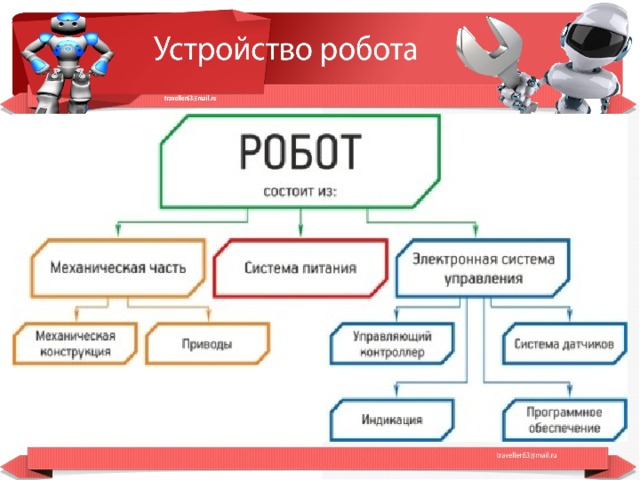
- Структурная схема робота
Контроллер
Чувствительные элементы (датчики)
с программой с элементами ИИ
Исполнительные элементы пр. Моторы
Окружающая среда
- 3 правила робототехники
Писатель фантаст АЙЗЕК АЗИМОВ
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому или Второму Законам.

1 Контроллер

- 2. Моторы (Приводы) шаговые моторы
Шаговый двигатель вращается на определенные “ступени” (на самом деле, конкретные градусы). Правильно настроенный шаговый двигатель может вращаться вправо и влево и может быть установлен в требуемое угловое положение. Одним заметным недостатком шаговых двигателей является то, что если мотор не работает, трудно быть уверенным в угле пуска двигателя.

- 2. Моторы ( пьезомоторы)

- 2. Моторы ( сервомото ры)
Преимущества: Встроенный редуктор Разнообразие Не такие дорогие Подходящая мощность для маленьких роботов Простота установки
Среднее потребление энергии

- Гидравлические приводы
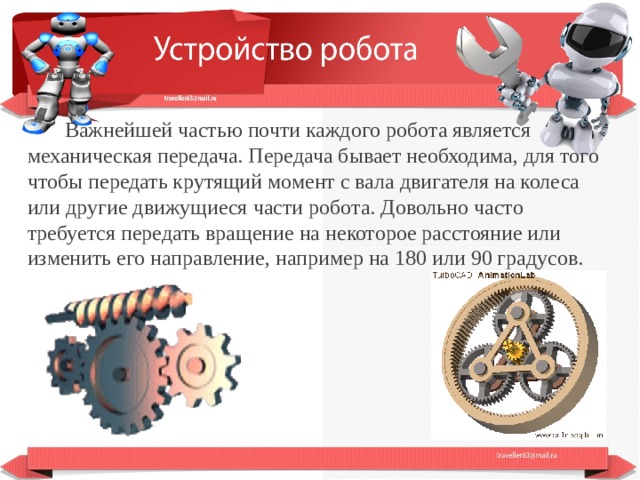
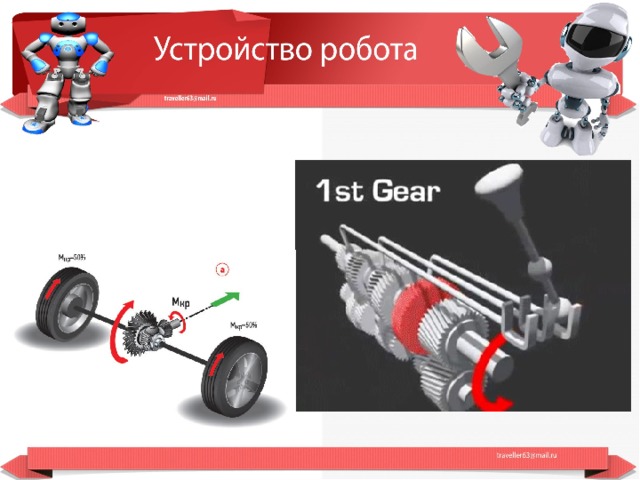
Важнейшей частью почти каждого робота является механическая передача. Передача бывает необходима, для того чтобы передать крутящий момент с вала двигателя на колеса или другие движущиеся части робота. Довольно часто требуется передать вращение на некоторое расстояние или изменить его направление, например на 180 или 90 градусов.

Виды передач
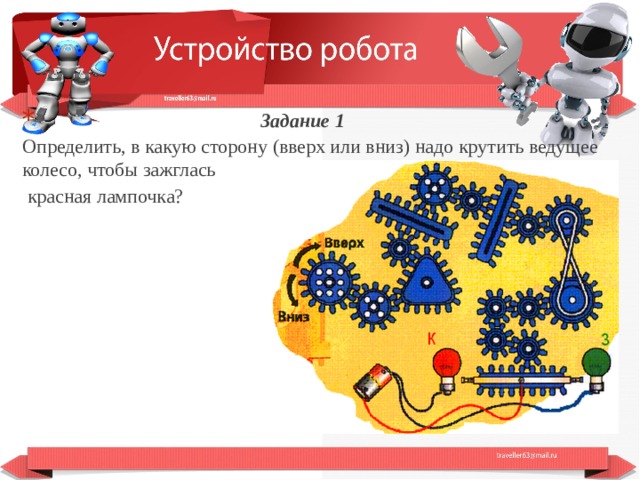
- Задание 1
Определить, в какую сторону (вверх или вниз) надо крутить ведущее колесо, чтобы зажглась
красная лампочка?

Какие бывают датчики для роботов?
Оптические датчики
При построении робота просто не обойтись без оптических датчиков. С помощью них аппарат будет «видеть» все вокруг. Эти сенсоры работают с помощью фоторезистора. Датчик отражения (излучатель и приемник) позволяет определять белые или черные участки на поверхности, что позволяет, к примеру, колесному роботу двигаться по нарисованной линии или определить близость препятствия. Источником света часто служит инфракрасный светодиод с линзой, а детектором — фотодиод или фототранзистор.

Звуковые датчики
Эти датчики служат для безопасного передвижения роботов в пространстве за счет измерения расстояния до препятствия от нескольких сантиметров до нескольких метров. К ним относятся микрофон (позволяет фиксировать звук, голос и шум), дальномеры, которые представляют собой датчики, измеряющие расстояние до ближайших объектов и другие ультразвуковые сенсоры. УЗ особенно широко используются практически во всех отраслях робототехники.
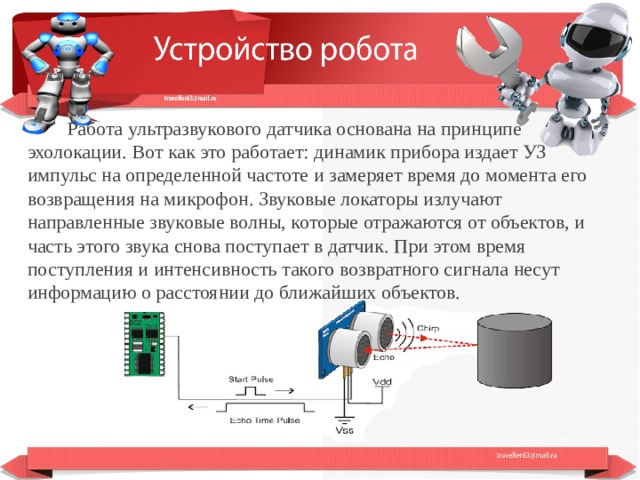
Работа ультразвукового датчика основана на принципе эхолокации. Вот как это работает: динамик прибора издает УЗ импульс на определенной частоте и замеряет время до момента его возвращения на микрофон. Звуковые локаторы излучают направленные звуковые волны, которые отражаются от объектов, и часть этого звука снова поступает в датчик. При этом время поступления и интенсивность такого возвратного сигнала несут информацию о расстоянии до ближайших объектов.
Датчики положения
Этот вид датчиков используется в основном в беспилотных транспортных средствах, промышленных роботах, а также устройствах, требующих самобалансировки. К датчикам положения относятся GPS , гироскопы (определение угла вращения) и акселерометры.
Гироскопы в робототехнике также
распространенная вещь. Они
отвечают за балансировку.
А за счет того, что эта деталь
относительно недорогая, её
можно установить в любой
самодельный робот.

Инфракрасные датчики
Самый доступный и простой вид датчиков, которые применяются в роботах для определения приближения. Инфракрасный датчик самостоятельно посылает инфракрасные волны и, поймав отраженный сигнал, определяет наличие препятствия перед собой.
В режиме "маяк", данный датчик
посылает постоянные сигналы,
по которым робот сможет
определять примерное
направление и удаленность
маяка.







Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!
Полезное для учителя

Реализация образовательных программ осуществляется с применением исключительно электронного обучения и ДОТ