
Россия, Калининград


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 05.04.2022 20:52

Тихомирова Виктория Константиновна
педагог дополнительного образования
31 год
Местоположение
Занятие 3: Блоки действия
Категория:
Прочее
31.03.2020 13:52

Просмотр содержимого документа
«Занятие 3: Блоки действия»
Блоки действий (моторы)
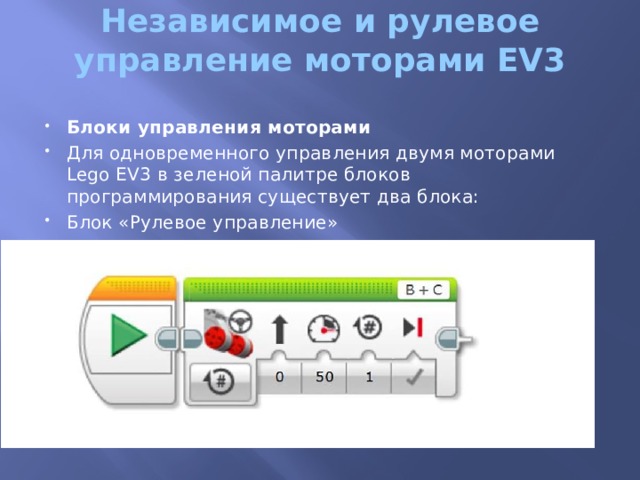
Независимое и рулевое управление моторами EV3
- Блоки управления моторами
- Для одновременного управления двумя моторами Lego EV3 в зеленой палитре блоков программирования существует два блока:
- Блок «Рулевое управление»
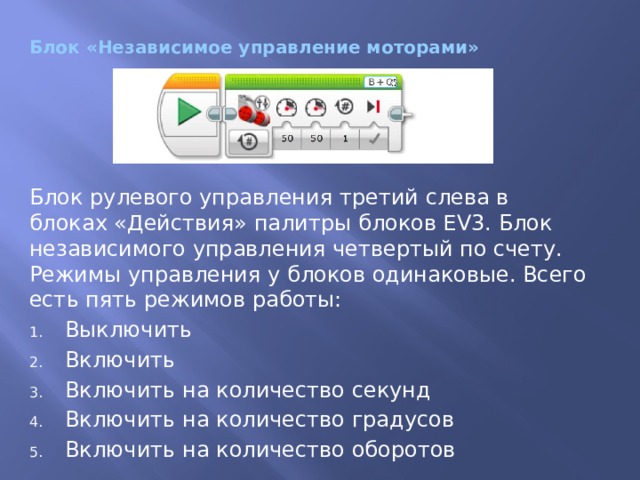
Блок «Независимое управление моторами»
Блок рулевого управления третий слева в блоках «Действия» палитры блоков EV3. Блок независимого управления четвертый по счету. Режимы управления у блоков одинаковые. Всего есть пять режимов работы:
- Выключить
- Включить
- Включить на количество секунд
- Включить на количество градусов
- Включить на количество оборотов
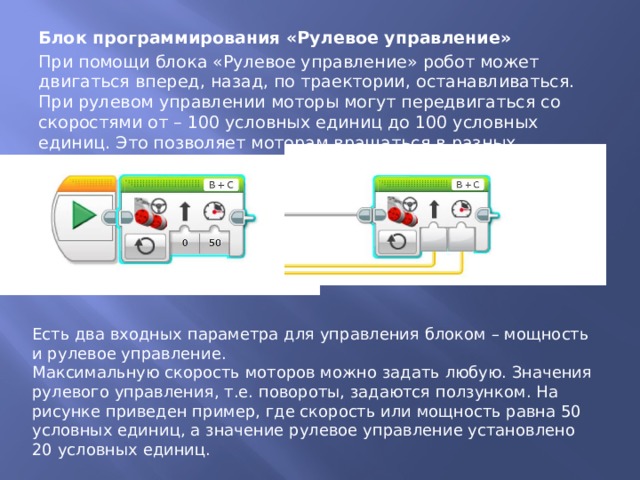
Блок программирования «Рулевое управление»
При помощи блока «Рулевое управление» робот может двигаться вперед, назад, по траектории, останавливаться. При рулевом управлении моторы могут передвигаться со скоростями от – 100 условных единиц до 100 условных единиц. Это позволяет моторам вращаться в разных направлениях.
Есть два входных параметра для управления блоком – мощность и рулевое управление.
Максимальную скорость моторов можно задать любую. Значения рулевого управления, т.е. повороты, задаются ползунком. На рисунке приведен пример, где скорость или мощность равна 50 условных единиц, а значение рулевое управление установлено 20 условных единиц.
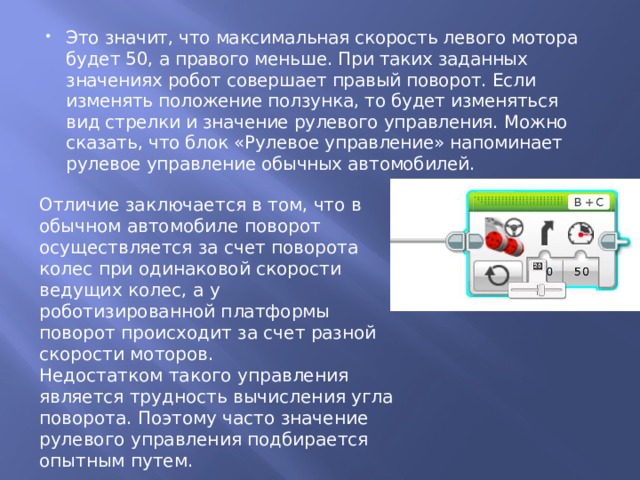
- Это значит, что максимальная скорость левого мотора будет 50, а правого меньше. При таких заданных значениях робот совершает правый поворот. Если изменять положение ползунка, то будет изменяться вид стрелки и значение рулевого управления. Можно сказать, что блок «Рулевое управление» напоминает рулевое управление обычных автомобилей.
Отличие заключается в том, что в обычном автомобиле поворот осуществляется за счет поворота колес при одинаковой скорости ведущих колес, а у роботизированной платформы поворот происходит за счет разной скорости моторов.
Недостатком такого управления является трудность вычисления угла поворота. Поэтому часто значение рулевого управления подбирается опытным путем.
- Блок программирования «Независимое управление»
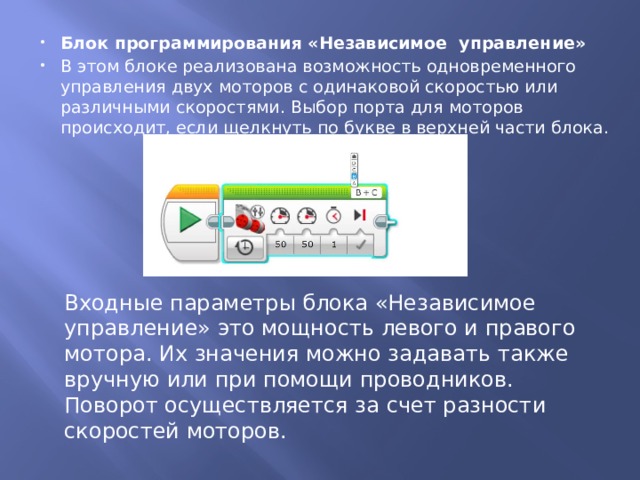
- В этом блоке реализована возможность одновременного управления двух моторов с одинаковой скоростью или различными скоростями. Выбор порта для моторов происходит, если щелкнуть по букве в верхней части блока.
Входные параметры блока «Независимое управление» это мощность левого и правого мотора. Их значения можно задавать также вручную или при помощи проводников. Поворот осуществляется за счет разности скоростей моторов.
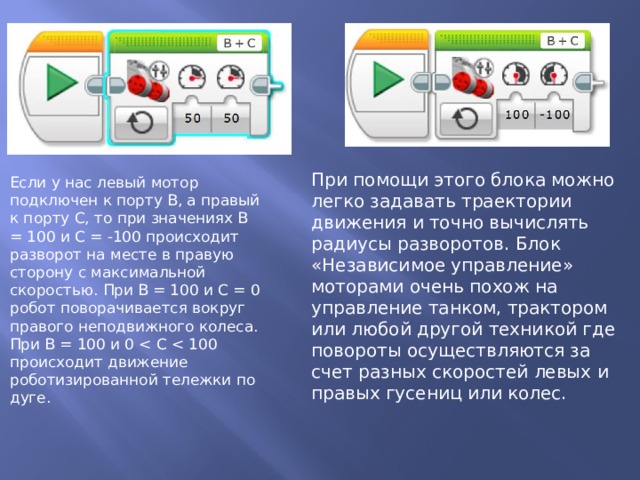
При помощи этого блока можно легко задавать траектории движения и точно вычислять радиусы разворотов. Блок «Независимое управление» моторами очень похож на управление танком, трактором или любой другой техникой где повороты осуществляются за счет разных скоростей левых и правых гусениц или колес.
Если у нас левый мотор подключен к порту В, а правый к порту С, то при значениях В = 100 и С = -100 происходит разворот на месте в правую сторону с максимальной скоростью. При В = 100 и С = 0 робот поворачивается вокруг правого неподвижного колеса. При В = 100 и 0

Большой мотор EV3. Блок программирования
Большой мотор EV3 является более мощным, чем средний мотор EV3. Это происходит за счет наличия в большом моторе EV3 редуктора. Редуктор является набором шестеренок и позволяет сделать понижающую или повышающую передачу.
Детали редуктора являются пластиковыми и поэтому не очень надежные и могут выйти из строя.
- В этом случае отремонтировать большой мотор EV3 достаточно сложно. У большого мотора передача понижающая. Это позволяет сделать мотор более мощным, но при этом скорость мотора становиться меньше.
- В нем также находится энкодер (датчик вращения), который позволяет контролировать вращение вала с точностью до одного градуса. Скорость вращения большого мотора составляет 160 – 170 оборотов в минуту.
- Вращение большого мотора EV3 мотора происходит при положительных заданных значениях мощности мотора по часовой стрелке. При этом мотор должен быть расположен так, чтобы вращающаяся часть была справа. Если значения мощности мотора отрицательны, то вращение происходит против часовой стрелки.
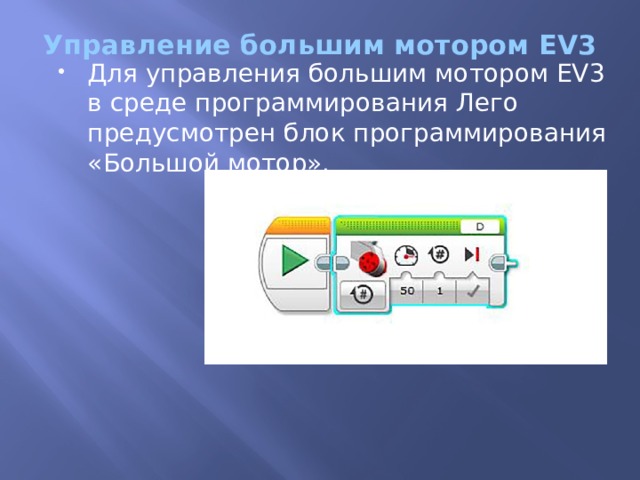
Управление большим мотором EV3
- Для управления большим мотором EV3 в среде программирования Лего предусмотрен блок программирования «Большой мотор».
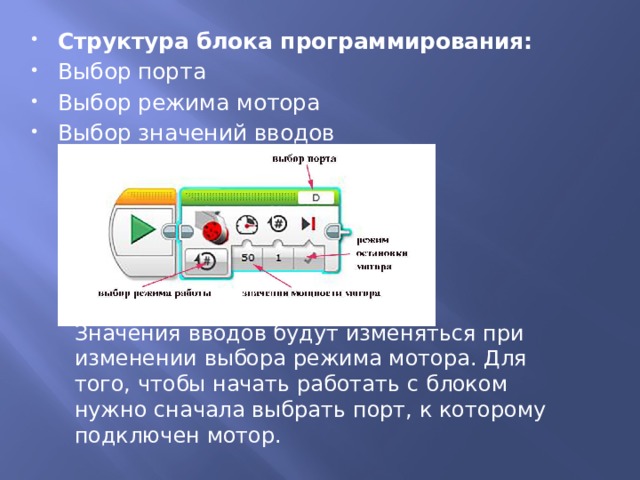
- Структура блока программирования:
- Выбор порта
- Выбор режима мотора
- Выбор значений вводов
Значения вводов будут изменяться при изменении выбора режима мотора. Для того, чтобы начать работать с блоком нужно сначала выбрать порт, к которому подключен мотор.
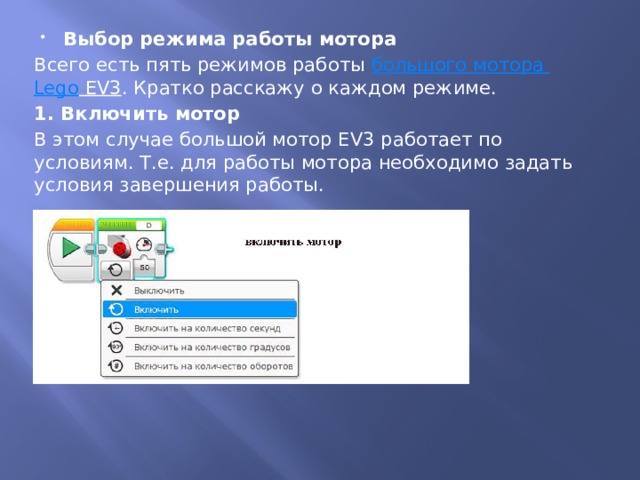
- Выбор режима работы мотора
Всего есть пять режимов работы большого мотора Lego EV3 . Кратко расскажу о каждом режиме.
1. Включить мотор
В этом случае большой мотор EV3 работает по условиям. Т.е. для работы мотора необходимо задать условия завершения работы.
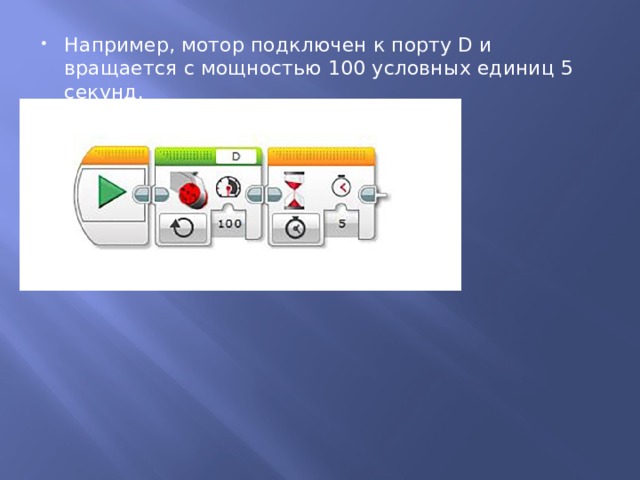
- Например, мотор подключен к порту D и вращается с мощностью 100 условных единиц 5 секунд.
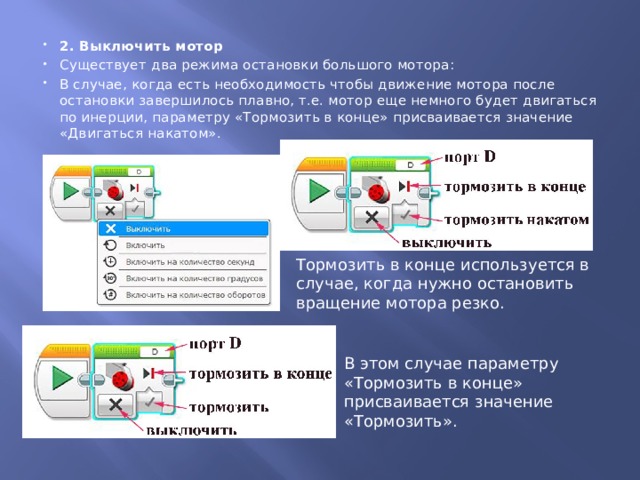
- 2. Выключить мотор
- Существует два режима остановки большого мотора:
- В случае, когда есть необходимость чтобы движение мотора после остановки завершилось плавно, т.е. мотор еще немного будет двигаться по инерции, параметру «Тормозить в конце» присваивается значение «Двигаться накатом».
Тормозить в конце используется в случае, когда нужно остановить вращение мотора резко.
В этом случае параметру «Тормозить в конце» присваивается значение «Тормозить».
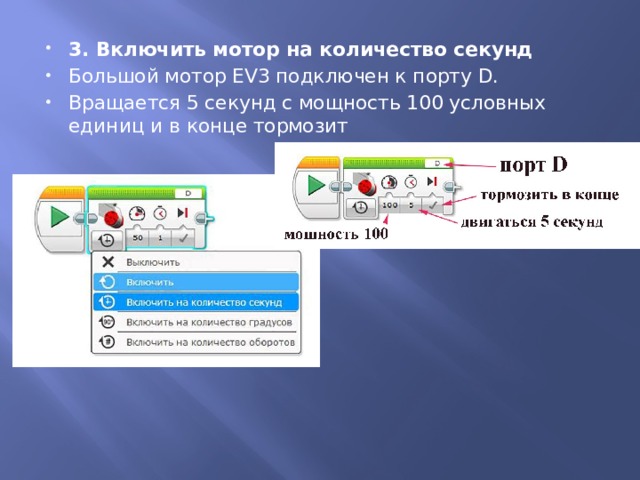
- 3. Включить мотор на количество секунд
- Большой мотор EV3 подключен к порту D.
- Вращается 5 секунд с мощность 100 условных единиц и в конце тормозит
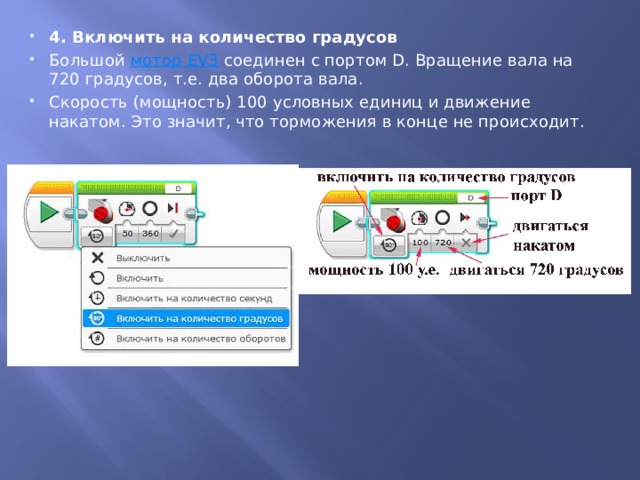
- 4. Включить на количество градусов
- Большой мотор EV3 соединен с портом D. Вращение вала на 720 градусов, т.е. два оборота вала.
- Скорость (мощность) 100 условных единиц и движение накатом. Это значит, что торможения в конце не происходит.
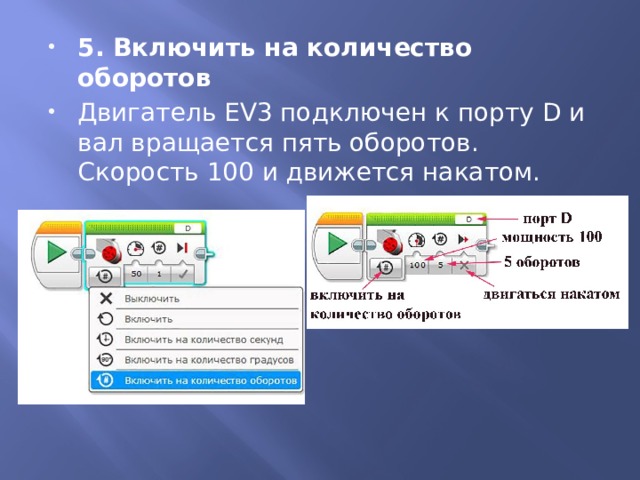
- 5. Включить на количество оборотов
- Двигатель EV3 подключен к порту D и вал вращается пять оборотов. Скорость 100 и движется накатом.

Средний мотор
- Средний мотор EV3 входит в состав базового и домашнего набора Lego EV3. Более правильно его называть средним сервомотором или сервоприводом.
- Сервомотор (сервопривод) – мотор с управлением при помощи отрицательной обратной связи.
Эта связь позволяет точно управлять параметрами движения мотора. Поэтому можно точно контролировать поворот вала и его текущее положение. Средний мотор EV3 имеет встроенный оптический энкодер. Энкодер можно еще назвать датчиком угла поворота вала или датчиком вращения.
- Средний мотор – характеристики
- Кратко опишу основные характеристики среднего мотора Lego EV3:
- Точность поворота – 1 градус
- Скорость вращения – 240 – 250 оборотов в минуту
- Вращающий момент – 8 Нсм
- Автоматическая идентификация
- Подключается средний мотор EV3 в любой порт микрокомпьютера Lego EV3 с буквами A, B, C, D. Это не очень мощный мотор. Поэтому он чаще используется для схватов, захватов передач типа червячной. По умолчанию средний сервомотор подключается к порту A.
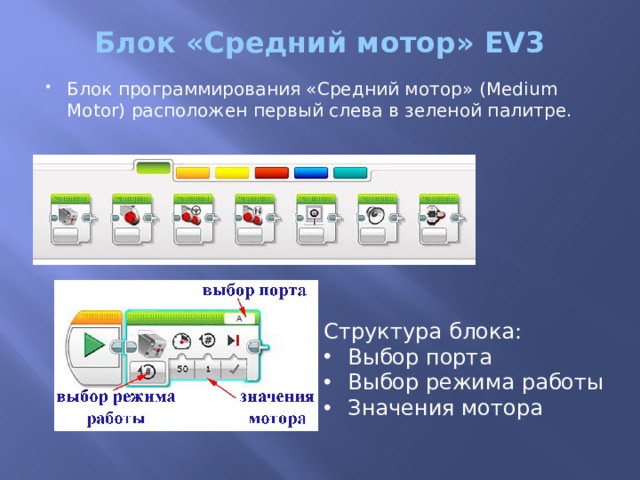
Блок «Средний мотор» EV3
- Блок программирования «Средний мотор» (Medium Motor) расположен первый слева в зеленой палитре.
Структура блока:
- Выбор порта
- Выбор режима работы
- Значения мотора
Комплекты видеоуроков для учителей








Скачать
© 2020, Тихомирова Виктория Константиновна 2912 43
Похожие файлы
Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

