
Россия, Калининград


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 05.04.2022 20:52

Тихомирова Виктория Константиновна
педагог дополнительного образования
31 год
Местоположение
Занятие 8. Гироскопический датчик
Категория:
Прочее
18.04.2020 13:27

Просмотр содержимого документа
«Занятие 8. Гироскопический датчик»

Гироскопический датчик

- Цифровой гироскопический датчик предназначен для измерения угла и направления вращения робота, а также скорости его вращения.
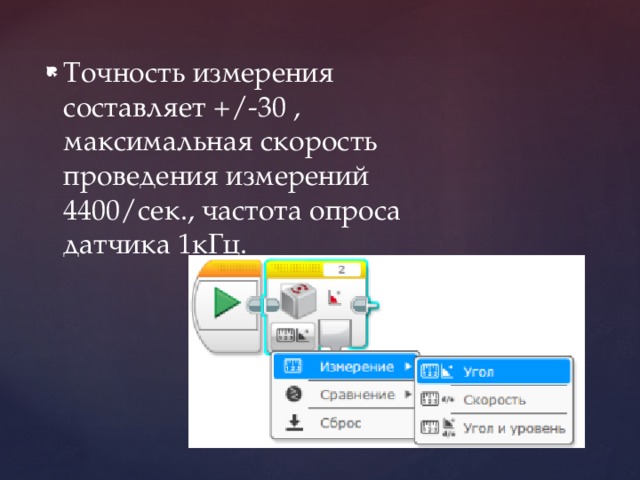
- Точность измерения составляет +/-30 , максимальная скорость проведения измерений 4400/сек., частота опроса датчика 1кГц.
- Гироскопический датчик определяет движение вокруг одной оси вращения. Это направление указано стрелкой на корпусе датчика. Угол и направление вращения может быть положительным или отрицательным. Вращение по часовой стрелке считается положительным, против часовой стрелки – отрицательным. Единица измерения скорости – градусы в секунду.

- Будучи включенным, при длительном нахождении робота в неподвижном состоянии, определяемое значение угла не остаётся постоянным, а ошибочно меняется или дрейфует. Поэтому, чем больше времени проходит от начала первого обращения к гироскопическому датчику до чтения показаний, тем менее точным становятся результаты за счёт систематического накопления ошибки. Поэтому перед началом каждого измерения всегда необходимо производить обнуление угла при помощи режима Сброс.

- Например: создадим программу, что бы робот двигался вперед, поворачивался на 45 градусов и двигался дальше.
Комплекты видеоуроков для учителей








Скачать
© 2020, Тихомирова Виктория Константиновна 3560 95
Похожие файлы
Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

