
Россия, Нижний Новгород


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 27.11.2025 02:37

Чернобай Любовь Сергеевна
Преподаватель математики (все направления) и преподаватель электрических дисциплин направления 13.02.13 (МДК 01.01 Электрические машины и аппараты, МДК 01.04 Техническое регулирование и контроль качества электрического и электромеханического оборудования)
Местоположение
Специализация
Презентация: "Асинхронные машины"
Категория:
Прочее
18.11.2025 06:21

Просмотр содержимого документа
«Презентация: "Асинхронные машины"»
Бесколлекторные асинхронные машины

Общие вопросы бесколлекторных машин переменного тока
Бесколлекторные машины переменного тока – это электромеханические устройства, которые используются для преобразования электрической энергии в механическую.
Модуль управления двигателем L293D

Общие вопросы бесколлекторных машин переменного тока
Одна из главных особенностей бесколлекторных машин заключается в отсутствии коллектора и щеток, что устраняет трение и износов каждой машины. Вместо этого используются электронные коммутаторы, которые управляют положением и направлением потока электрического тока.
Бесколлекторные машины переменного тока – это электромеханические устройства, которые используются для преобразования электрической энергии в механическую.
Модуль управления двигателем L293D

Устройство бесколлекторных асинхронных машин
Одна из главных особенностей бесколлекторных машин заключается в отсутствии коллектора и щеток, что устраняет трение и износов каждой машины. Вместо этого используются электронные коммутаторы, которые управляют положением и направлением потока электрического тока.
Электроника
Ротор
Статор
ПРОПУСК
Модуль управления двигателем L293D

Устройство бесколлекторных асинхронных машин
В беcколлекторных двигателях коммутацией управляет электроника. Для определения момента коммутации контроллер может использовать или датчики положения (Датчики Холла) или обратную ЭДС, генерируемую неподключенными обмотками.
Электроника
ПРОПУСК
Ротор
Статор

Устройство бесколлекторных асинхронных машин
Ротор асинхронного двигателя – вращающаяся часть – состоит из стального вала, магнитопровода , набранного из листов электротехнической стали с выштампованными пазами. Обмотка ротора бывает короткозамкнутой или фазной.
Ротор
ПРОПУСК
Электроника
Статор

Устройство бесколлекторных асинхронных машин
Статор – неподвижная часть двигателя – имеет цилиндрическую форму. Он состоит из корпуса , сердечника и обмотки. Корпус литой стальной или чугунный. Магнитопровод статора собирается из тонких листов электротехнической стали.
Статор
ПРОПУСК
Электроника
Ротор

Режимы работы бесколлекторных машин переменного тока
1
У бесколлекторных машин переменного тока присутствует 3 режима работы:
1. Двигательный режим
2. Генераторный режим
3. Режим торможения
2
3
ПРОПУСК

Режимы работы бесколлекторных машин переменного тока
При включении обмотки статора в сеть трехфазного тока возникает вращающееся магнитное поле, которое, сцепляясь с короткозамкнутой обмоткой ротора, наводит в ней ЭДС. При этом в стержнях обмотки ротора появляются токи.
У бесколлекторных машин переменного тока присутствует 3 режима работы:
1. Двигательный режим
2. Генераторный режим
3. Режим торможения
Двигательный режим
ПРОПУСК

Режимы работы бесколлекторных машин переменного тока
Если обмотку статора включить в сеть, а ротор асинхронной машины вращать в направлении вращения магнитного поля с большой частотой, то в этом случае механическая мощность приводного двигателя в основной своей части будет преобразована в электрическую активную мощность переменного тока.
У бесколлекторных машин переменного тока присутствует 3 режима работы:
1. Двигательный режим
2. Генераторный режим
3. Режим торможения
Генераторный режим
ПРОПУСК

Режимы работы бесколлекторных машин переменного тока
Если у работающего асинхронного двигателя поменять местами любую пару присоединительных проводов, то вращающееся поле статора изменит направление вращения на обратное. При этом ротор машины под действием инерции будет вращаться в прежнем правлении. В этих условиях электромагнитный момент машины будет оказывать на ротор тормозящее действие.
У бесколлекторных машин переменного тока присутствует 3 режима работы:
1. Двигательный режим
2. Генераторный режим
3. Режим торможения
Режим торможения
ПРОПУСК
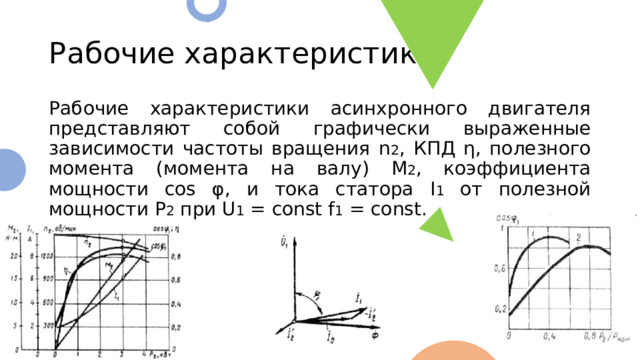
Рабочие характеристики
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n 2 , КПД η, полезного момента (момента на валу) М 2 , коэффициента мощности cos φ, и тока статора I 1 от полезной мощности Р 2 при U 1 = const f 1 = const.
Пусковые свойства двигателей
Пуск асинхронного двигателя сопровождается переходным процессом, обусловленным переходом ротора и механически связанных с ним частей исполнительного механизма из состояния покоя в состояние равномерного вращения.
Пусковые свойства двигателя определяются в первую очередь значением пускового тока Iп или его кратностью Iп/ Iном и значением пускового момента Мп или его кратностью Мп/Мном.
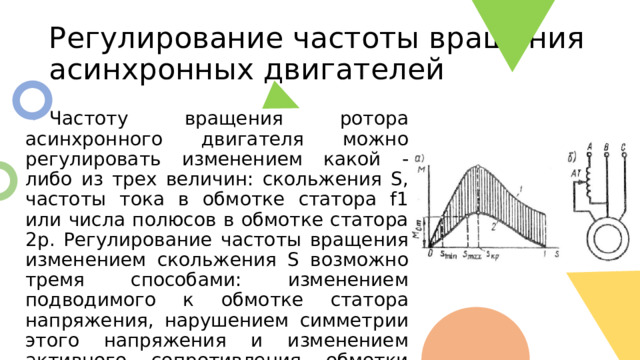
Регулирование частоты вращения асинхронных двигателей
Частоту вращения ротора асинхронного двигателя можно регулировать изменением какой - либо из трех величин: скольжения S, частоты тока в обмотке статора f1 или числа полюсов в обмотке статора 2р. Регулирование частоты вращения изменением скольжения S возможно тремя способами: изменением подводимого к обмотке статора напряжения, нарушением симметрии этого напряжения и изменением активного сопротивления обмотки ротора.
Регулирование частоты вращения изменением частоты тока в статоре.
Этот способ регулирования (частотное регулирование) основан на изменении синхронной частоты вращения n1 = f1 60/ р . Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой.
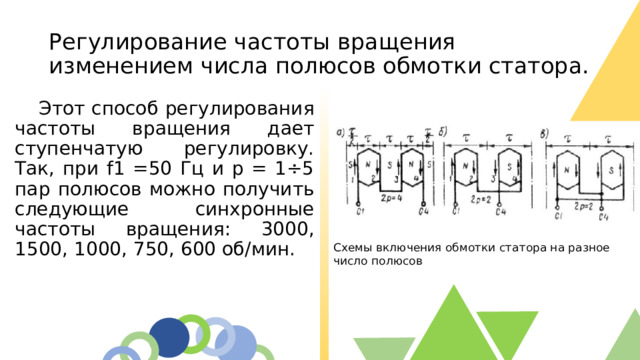
Регулирование частоты вращения изменением числа полюсов обмотки статора.
Этот способ регулирования частоты вращения дает ступенчатую регулировку. Так, при f1 =50 Гц и р = 1÷5 пар полюсов можно получить следующие синхронные частоты вращения: 3000, 1500, 1000, 750, 600 об/мин.
Схемы включения обмотки статора на разное число полюсов

Асинхронные машины специального назначения

Исполнительные электродвигатели
В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности.
С помощью этих двигателей осуществляется преобразование электрического сигнала в механическое перемещение — вращение вала.

Асинхронный преобразователь частот
Частотный преобразователь – аппарат, применяемый для регулировки скорости вращения асинхронного двигателя переменного тока. Он включает в себя выпрямитель, инвертор и современную цифровую систему управления.

Системы синхронной связи
В современной технике часто возникает необходимость в синхронизации вращения или поворота осей механизмов. Синхронной связью называют электрическую связь, которая обеспечивает одновременное вращение или одновременный поворот двух находящихся на расстоянии друг от друга и механически не связанных валов.

Фазорегулятор
Предназначен для изменения фазы вторичного напряжения относительно первичного при неизменном вторичном напряжении. В отличие от ИР обмотки ротора и статора ФР электрически не соединены друг с другом, т. е. имеют трансформаторную связь, поэтому ФР иногда называют поворотным трансформатором.

Линейные асинхронные двигатели
Подвижная часть линейного двигателя совершает поступательное движение, поэтому применение этих двигателей для привода рабочих машин с поступательным движением рабочего органа позволяет упростить кинематику механизмов, уменьшим потери в передачах и повысить надежность механизма в целом.

Индукционный регулятор напряжения
Индукционный регулятор напряжения представляет собой асинхронную машину с фазным ротором, предназначенную для плавного регулирования напряжения. Обмотки статора и ротора в ИР имеют автотрансформаторную связь , поэтому ИР иногда называют поворотным автотрансформатором.
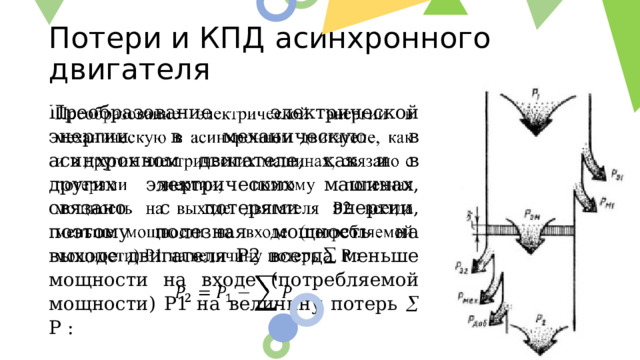
Потери и КПД асинхронного двигателя
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) Р1 на величину потерь Р :
ВНИМАНИЕ
Спасибо за внимание








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

