
Россия, Каменск-Шахтинский


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 17.04.2026 10:21

Барышев Евгений Валентинович
педагог дополнительного образования
61 год
Местоположение
Специализация
«Промышленная робототехника»
Категория:
Прочее
10.12.2024 09:54

Просмотр содержимого документа
««Промышленная робототехника»»
муниципальное бюджетное учреждение
дополнительного образования «Станция юных техников»
города Каменск-Шахтинский
Проектная работа
Наименование секции: «Промышленная робототехника»
Тема: «Вилочный погрузчик FORKLIFTS MS-90»
Автор работы:
Цыбенко Александр, 9 кл.,
МБОУ лицей №5,
г. Каменск-Шахтинский, Ростовская область
Руководитель:
Барышев Евгений Валентинович,
педагог дополнительного образования,
МБУ ДО «СЮТ»,
г. Каменск-Шахтинский, Ростовская область
2024 год
Оглавление
|
| Введение | 3 |
| 1. | Исследование и анализ | 4 |
| 2. | Принцип работы модели | 7 |
| 3. | Этапы изготовления модели | 8 |
|
| Материалы и инструменты | 8 |
|
| Механика модели | 8 |
|
| Электроника модели | 10 |
| 4. | Заключение | 13 |
| 5. | Список литературы | 14 |
| 6. | Приложения | 15 |
Введение
Погрузчиками фронтального типа принято называть разновидность тяжелого автотранспорта, оснащенную широким ковшом, расположенным в передней части, предназначенным для погрузки, разгрузки и перемещения различных грузов [6, 125].
Во время сильного снегопада наблюдал за работой погрузчика, который грузил снег в грузовик. По моему мнению, погрузчик делал очень много лишних движений, что в свою очередь затягивало время по очистке дороги от снега.
Целью данного проекта является создание фронтального вилочного погрузчика на электротяге, с максимальной маневренностью, для погрузки и перемещения различных грузов.
Задачи проекта:
- рассмотреть виды и разновидности фронтальных погрузчиков, технические характеристики;
- разработать поворотный механизм для погрузчика;
– разработать чертежи корпуса и механизмов, схемы электроники для модели погрузчика.
При всем при этом стоит учитывать безопасность и экологическую составляющую.
Для выполнения поставленной цели и задач проекта необходимо изучить виды и разновидности различных фронтальных погрузчиков, техническую литературу, способы управления погрузочно-разгрузочной техникой.
Исследование и анализ
В век бурного развития промышленности, появления высокоэффективных технологий постоянно растет потребность в использовании новой техники, способной выполнить любые сложные задачи. И главным требованием, которое предъявляется к ней сегодня, является ее практичность и универсальность.
Фронтальный погрузчик - универсальная самоходная спецтехника, разновидность ковшового погрузчика, предназначенная для захвата, погрузки и транспортировки различных материалов, а также для выполнения карьерных и землеройных работ [5, 73]. Фронтальный погрузчик способен транспортировать грузы, буксировать различное оборудование на небольшие расстояния. Основным рабочим оборудованием погрузчика является ковш, закреплённый на конце подъёмной стрелы. Также для ряда моделей предусмотрено сменное оборудование, крановые крюки, вилы, захваты для брёвен, снегоочистители.
Продуктивная работа на складе невозможна без использования специализированной техники, способной перевозить самые разные грузы в условиях небольшого свободного места. Варианты складских погрузчиков могут быть разнообразными, иметь особенную конструкцию. Одним из самых востребованных является ричтрак. [7].
 Ричтрак – самоходное грузоподъёмное оборудование на электрической тяге. Техническое название – штабелёр (штабелеукладчик) (рисунок 1). Предназначен штабелёр для работы в торговых центрах, на складах и базах, в грузовых и таможенных терминалах, – с развитой стеллажной конструкцией, высотой до 5 ярусов, и ровными полами.
Ричтрак – самоходное грузоподъёмное оборудование на электрической тяге. Техническое название – штабелёр (штабелеукладчик) (рисунок 1). Предназначен штабелёр для работы в торговых центрах, на складах и базах, в грузовых и таможенных терминалах, – с развитой стеллажной конструкцией, высотой до 5 ярусов, и ровными полами.
Рисунок 1.
Погрузчики колесного типа (рисунок 2) считаются более универсальными и удобными в применении. По своей сути они являются самоходными транспортными средствами на колесной базе, оснащенные мощными двигателями. Оснащаются различными разновидностями навесного оборудования, позволяющего погрузчикам, помимо организации погрузки и выгрузки поддонов с товарами, работать с лесом, бочками и другими грузами.
 Фронтальный погрузчик представляет собой самоходное транспортное средство на колесном шасси, оборудованное ковшом. За счет своей мощности и превосходных технико-тактических параметров этот погрузчик может эксплуатироваться как бульдозер, захватывающий и перевозящий различные материалы на весьма значительные расстояния, самостоятельно роющий траншеи и выравнивающий площадки.
Фронтальный погрузчик представляет собой самоходное транспортное средство на колесном шасси, оборудованное ковшом. За счет своей мощности и превосходных технико-тактических параметров этот погрузчик может эксплуатироваться как бульдозер, захватывающий и перевозящий различные материалы на весьма значительные расстояния, самостоятельно роющий траншеи и выравнивающий площадки.
Рисунок 2.
Основным отличием между разными видами погрузчиков является концепция поворота, то есть способ маневрирования, и тип шасси - колесное или гусеничное (рисунок 3).
Органы управления ходом: у мини-погрузчиков с бортовым поворотом - рычаги или джойстик, у шарнирно-сочлененных - педали и руль.


Рисунок 3. Мини-погрузчики на колесном и гусеничном шасси.
Фронтальные погрузчики представляют собой достаточно специфическую технику, которая хоть и славится своей универсальностью, но способна выполнять лишь узкий фронт задач.
Вывод:
В целях проверки гипотезы и для наглядной демонстрации принципа работы ричтрака было принято решение создать модель фронтального вилочного погрузчика «FORKLIFTS MS-90» (вилочный погрузчик moves sideways двигается боком) на колесном шасси.
Единственным минусом является то, что все погрузчики двигаются по прямой траектории и совершают много движений при повороте. Для того чтобы наш ричтрак был маневренным установим на каждый кронштейн с колесом по сервоприводу, теперь поворотный механизм будет поворачивать каждое колесо на 90 градусов относительно направления движения [10].
В качестве контроллера выбрали контроллеры марки Atmega 8 и Atmega 328 [3, 108].
Для передачи команд по радиоканалу выбрали беспроводной модуль NRF24L01 2,4 ГГц. С помощью этого модуля можно передавать по 120 каналам более 100 команд [8].
В качестве драйверов для ходовых двигателей и подъема стрелы применим самодельные платы драйверов [9].
2. Принцип работы модели
В движение модель ричтрака приводят 4 двигателя, которые расположены в кронштейнах колес.
В пульте установлены джойстики, для плавного движения вперед и назад и рулевое колесо для поворота колес на 180 градусов [2, 72 -75].
При плавном повороте на небольшой угол руля на пульте влево, все колеса поворачивают влево, ричтрак плавно поворачивает влево. При повороте руля на большой угол, все колеса поворачивают в одну сторону на 90 градусов, ричтрак движется боком.
Ричтрак может работать на всех промышленных предприятиях, где требуется погрузка-разгрузка различных грузов, может использования и при работе в опасных для человека условиях.
Передвигается ричтрак на резиновых колесах, и управляется оператором дистанционно, с помощью пульта, может работать на расстоянии до 1000 метров от центра управления.
Питание электроники и двигателей осуществляется от аккумулятора.
На ричтраке возможна установка видеокамеры, которая будет позволять оператору осматривать окрестности, вычислять положение ричтрака относительно препятствий. Несмотря на то, что он оснащен датчиками препятствий, иногда требуется вмешательство оператора для помощи в обходе сложных препятствий.
Программное обеспечение универсально, может меняться оператором для выполнения конкретной задачи (разгрузка, сортировка, загрузка), также контролировать маршрут передвижения.
Для обеспечения безопасности для людей, ричтрак оснащен сигнальными маячками оранжевого цвета. При появлении на пути человека, он останавливается.
3. Этапы изготовления модели
Материалы и инструменты
Для изготовления модели вилочного погрузчика применялся следующий инструмент и материал:
Оцинкованная жесть толщиной 0,4мм, размером 210 х 300мм.
Пластмасса толщиной 3мм, размером 240 х 140мм.
4 колеса, диаметром 100мм, шириной 50мм.
Редукторы заводского производства - 4шт.
Электрические двигатели постоянного тока - 2шт.
Пруток металлический диаметром 6мм, длиной 400мм.
Гайки М 3 - 12 шт.
Болты диаметром 3мм, длина 8мм - 12шт.
Проволока диаметром 3мм, длиной 400мм.
Провода монтажные сечением 0,5мм2, длиной примерно 350см.
Припой ПОС-60 с канифолью диаметром 3мм, длиной 100см.
Паяльная кислота 3мл.
Паяльник 100Вт и 40Вт 220в.
Набор слесарного и монтажного инструмента.
Сверлильный станок. Сверла диаметром 2,5мм, 2,8мм, 3,0мм, 5.0…7,0мм
Резбонарезной инструмент М3 и М4 (плашка и метчик).
Наждачная бумага Р100, Р400 размером 210 х 300мм.
Краска полиакриловая в баллончиках, грунтовка - 4 баллона.
Механика модели
При разработке чертежей ричтрака учитывались легкодоступные и дешевые материалы (см. приложение). Модель разрабатывалась на колесном шасси [1, 32]. Диаметр ведущих колес 100 мм. Ширина колес 50 мм.
Некоторые детали модели смоделировали в компьютерной программе Autodesk 123ds и распечатали на 3D принтере (рис. 4).
Время создания 3D деталей на компьютере и печати на 3D принтере составило примерно 20 часов. Фотографии 3D деталей находятся в приложении (рис. 13-15).

Рисунок 4. Создание 3D деталей
Вся ходовая часть робота крепятся к металлической раме (рисунок 5), на верхней части располагается плата с контроллером, беспроводной модуль радиоканала и драйвера для ходовых двигателей и двигателей для подъема грузовой площадки. На нижней части установлен отсек для аккумуляторов.

Рисунок 5. Сборка шасси модели.
Грузовую площадку с навесным оборудованием поднимет самодельный механизм, чертеж которого изображен на рисунке 6.
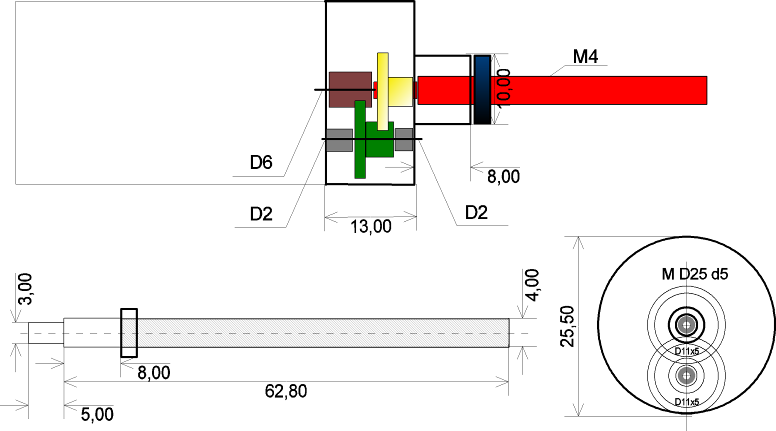
Рисунок 6. Механизм подъема стрелы.
Электроника модели
Пульт управления ричтраком построен на контроллере марки Atmega 8. В передатчике к нему подключены джойстик, для управления ходовыми двигателями, кнопки управления двигателем грузовой площадки, модуль NRF-24L и переменный резистор для управления сервоприводами.
В приемнике к контроллеру марки Atmega 328 подключены: модуль NRF-24L, драйвер ходовых двигателей, выполненный на микросхеме TDA2190P, драйвер для поднятия грузовой площадки и блок питания для сервоприводов.
Микроконтроллеры марки ATmega сочетают в себе функциональность, компактность и сравнительно не высокую цену.
Программное обеспечение было написано в среде программирование Arduino ID версии 1.0.5 и загружено в контроллеры через программатор Arduino ISP [4].
Питание электроники передатчика и приемника и двигателей осуществляется от аккумулятора, напряжение - 8,4 вольт. Потребляемый ток передатчика 100мА, а ричтрака 800мА.
На плате контроллера предусмотрены места для установки дополнительных датчиков, расширяющих функциональные возможности ричтрака.
Принципиальные схемы передатчика и приемника изображены на рисунках 7 и 8 соответственно.
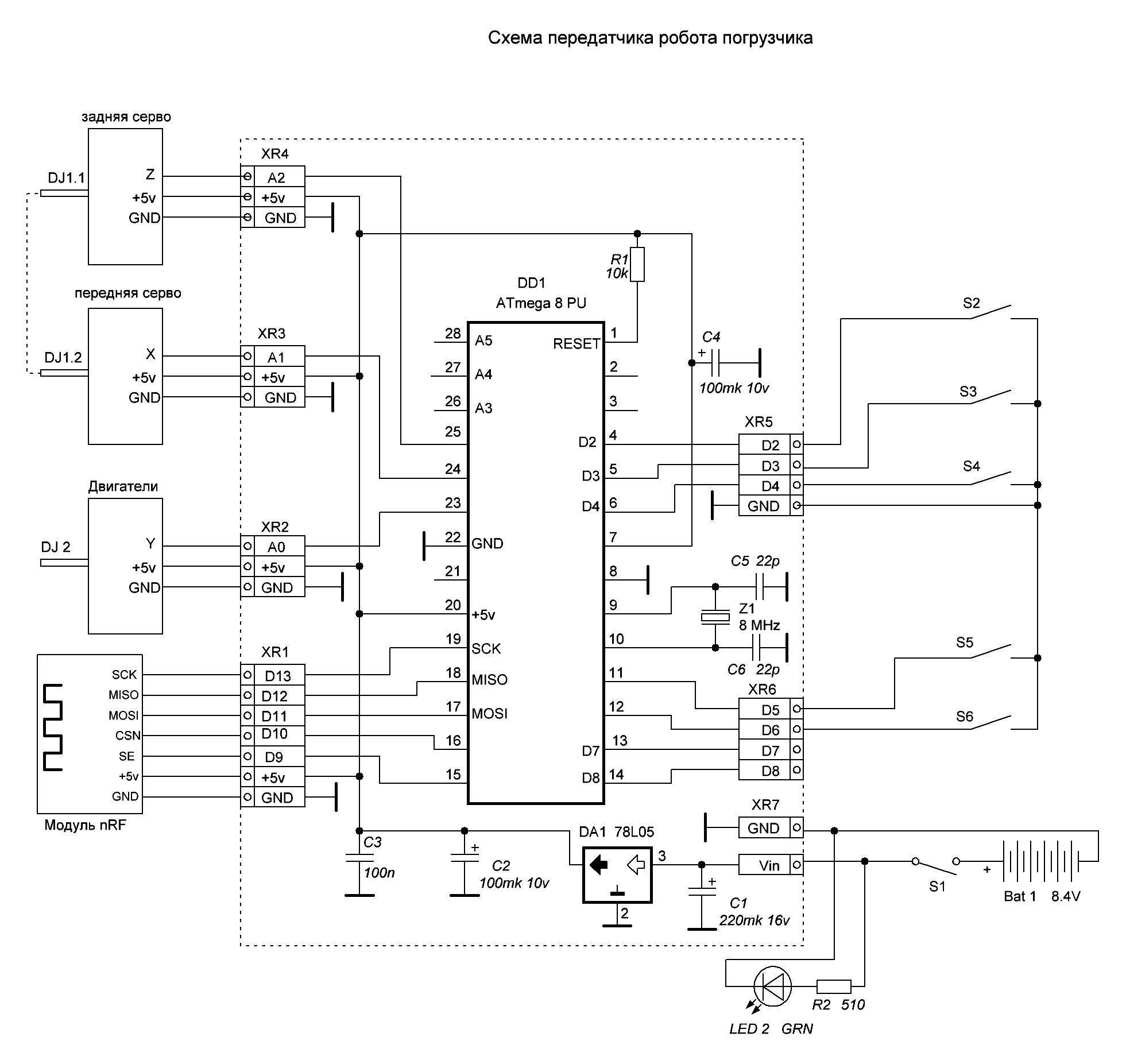
Рисунок 7. Принципиальная схема передатчика (пульт).
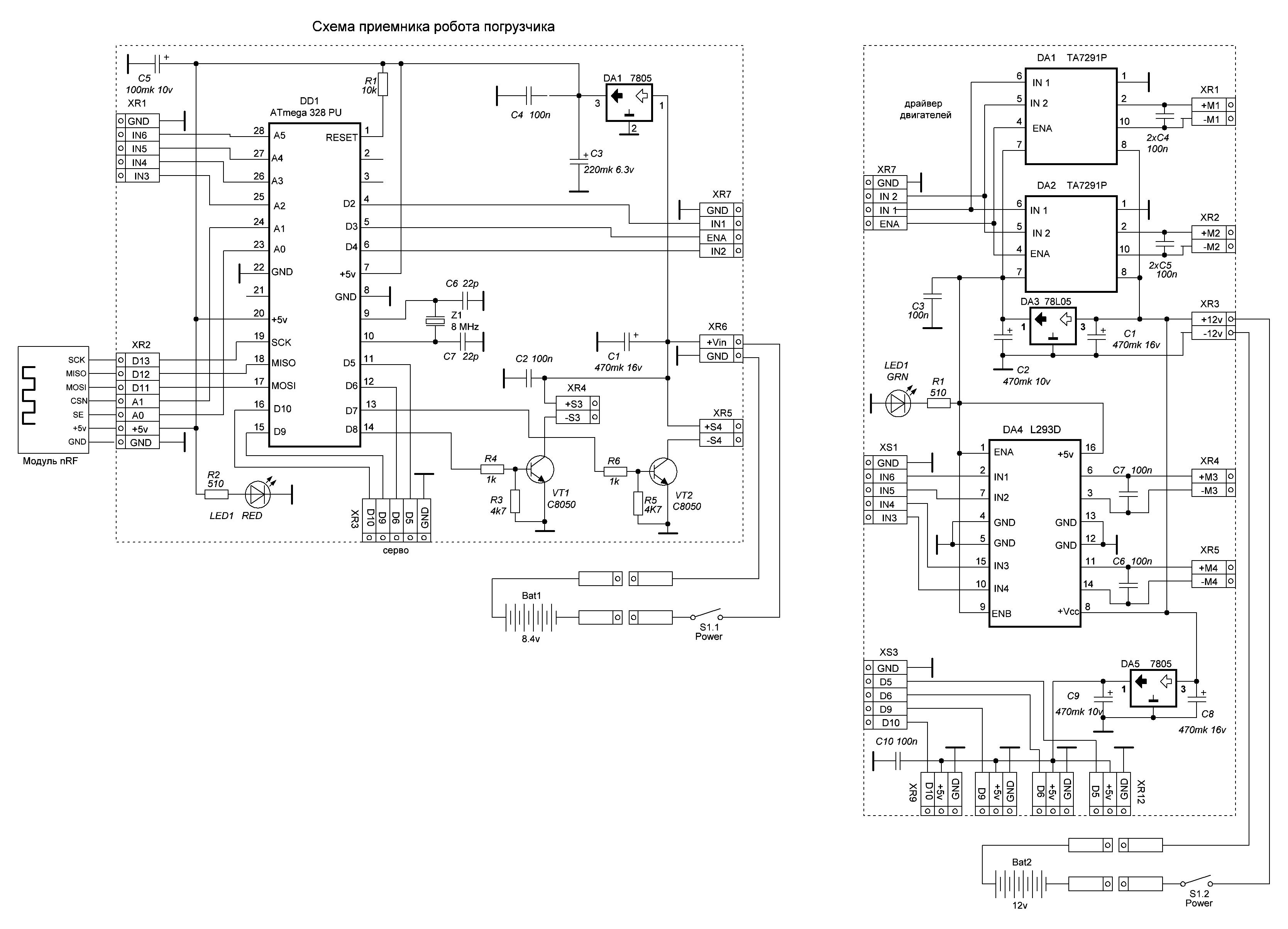
Рисунок 8. Принципиальная схема приемника.
Принцип работы дистанционного управления по радиоканалу довольно прост, передатчик отправляет символы при нажатии соответствующих кнопок на пульте. Контроллер получает, и обрабатывает поступающие символы, включает или выключает исполнительный механизм (драйвер) и поворачивает сервомеханизм на определенный угол [1, 69].
Блок сигнального маячка предназначен для светового оповещения о работе ричтрака (рисунок 9). Собран по классической схеме мультивибратора с частотой переключения 10 Гц.
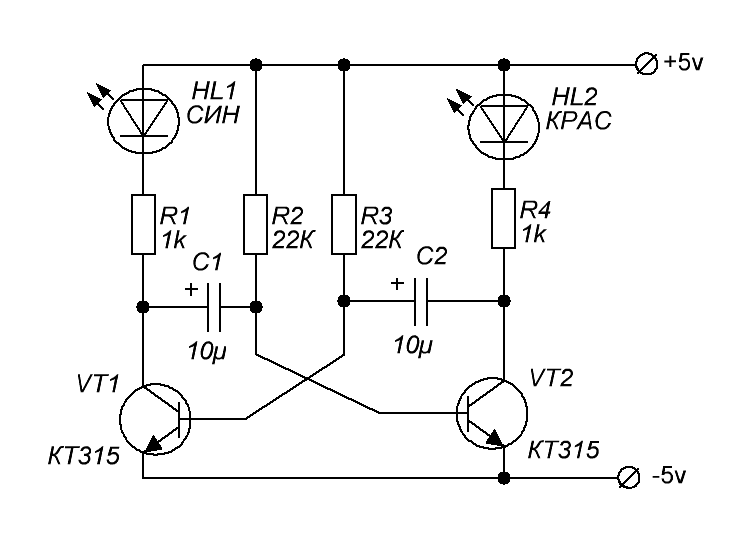
Рисунок 9. Принципиальная схема светового маячка.
Монтажные платы созданы в компьютерной программе Sprint Layout версии 6 и изготовлены из фольгированного стеклотекстолита на фрезерном станке (рис. 10 - 12).

Рисунок 10. Создание монтажных плат.
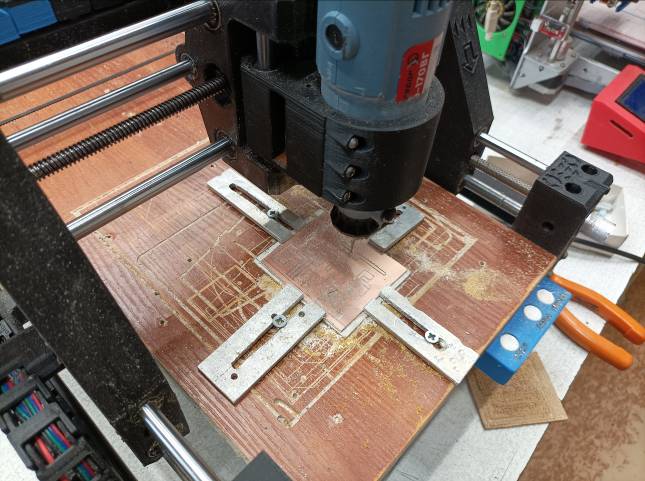
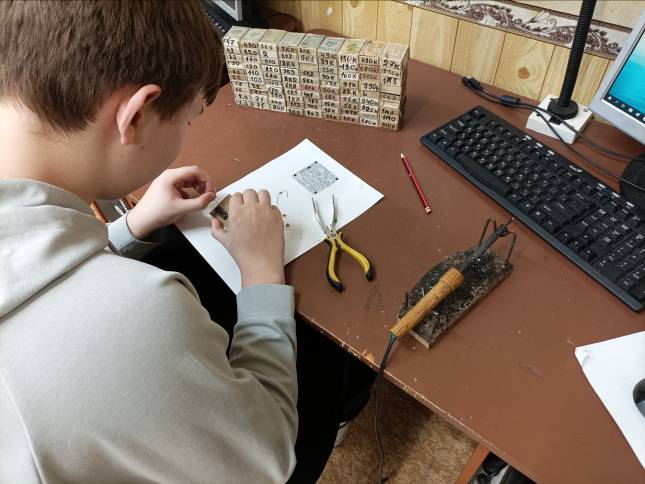
Рисунок 11. Фрезеровка и пайка монтажных плат.
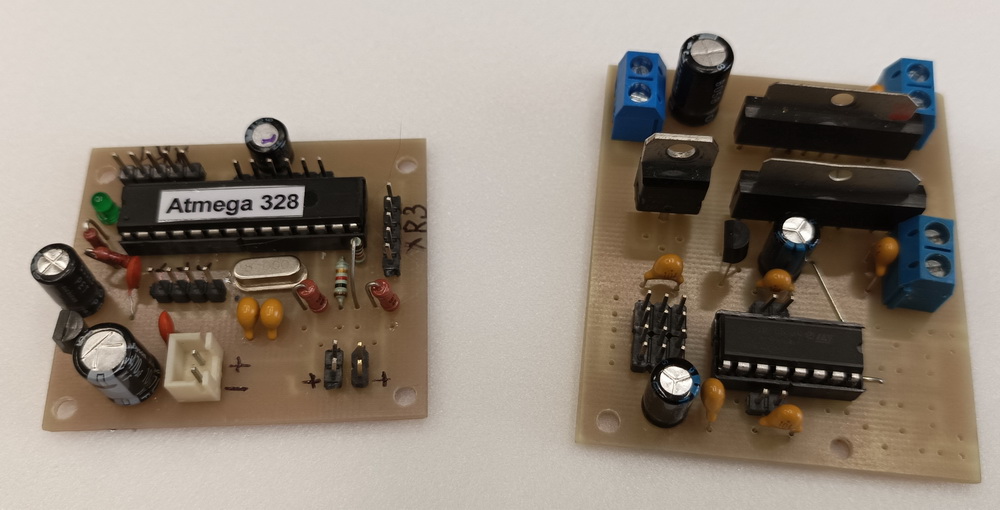
Рисунок 12. Монтажные платы.
4. Заключение
Для наглядной демонстрации принципа работы фронтального вилочного погрузчика, и выполнение поставленных задач, был создан дистанционно управляемый ричтрак на основе беспроводного модуля NRF-24L01. Были исследованы конструкция и поведение ричтрака, особенности его системы подчинения оператору. Затраты на изготовление модели составили 1860 рублей.
Вывод:
Принцип действия ричтрака отлично зарекомендовал себя на испытаниях. Такой способ погрузки и разгрузки грузов не только возможен, но и эффективен, экономит время и освобождает оператора от монотонной работы.
Среди преимуществ, которыми обладает данная модель ричтрака, можно выделить следующее:
Комфортность - оператор работает в теплом, светлом помещении, где нет пыли грязи, повышается эффективность работы;
Маневренность – ричтрак может развернуться на небольшом пятачке, что особенно важно при работе в стесненных условиях;
Функциональность – на ричтраке может устанавливаться сменное оборудование (вилы, захваты, ковши и т.д.).
При относительно невысокой стоимости, такой ричтрак мог бы удовлетворить требованиям малых предприятий, обеспечивая высокую производительность.
5. Список литературы
Джон Ловин. Создаем робота-андроида своими руками. - М.: ДМК пресс, 2007.
Микушин А. В. Занимательно о радиоуправлении. - СПб.: БХВ-Петербург, 2006.
Петли В. А. Проекты е использованием контроллера Arduino. - 2-е нзд , перераб и доп. - СПб.: БХВ-Погсрбург, 2015. - 464 с ил.
Соммер У. Программирование микроконтроллерных плат Arduino/Freeduino. М.: БХВ-Петербург, 2012. - 256 с ил.
Падил, В. А. Погрузо-разгрузочные машины: справочник / В. А. Падил - М.: Транспорт, 1981.- 448 с.
Скворцов Б. М. Подъемно-транспортное оборудование. Каталог-справочник. М.: ЦИНТИМ, 1962, 430 с.
Виды и разновидности погрузчиков фронтального типа. Электронный ресурс. Режим доступа: http://machinspec.ru/skladskaya/pogruzchik/frontalnyj.html.
Радиоуправление на Arduino + NRF24L01. Электронный ресурс. Режим доступа: http://portal-pk.ru/news/124-radioupravlenie-na-arduino-%2B-nrf24l01-%2B-giroskop-gy-521-mpu-6050.html.
Мощный полумостовой транзисторный драйвер. Электронный ресурс. Режим доступа: http://electe.blogspot.com.
Подробно о сервах и типах сервоприводов. Электронный ресурс. Режим доступа: http://www.rc-cars.ru/news/385-podrobno-o-servah-i-tipah-servoprivodov.html.
Приложение
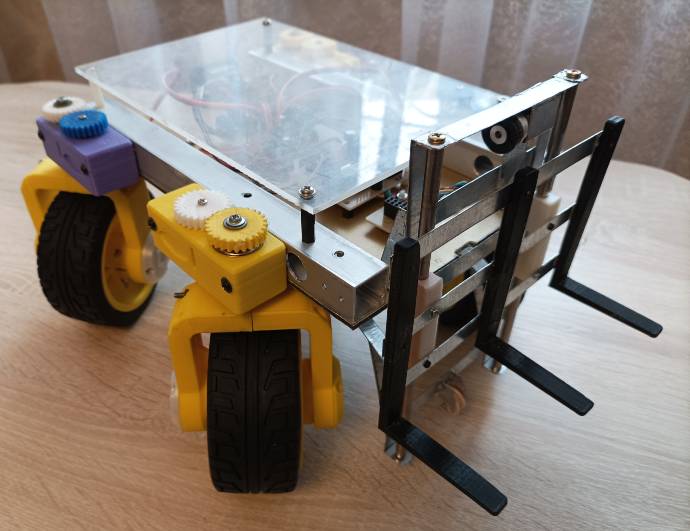
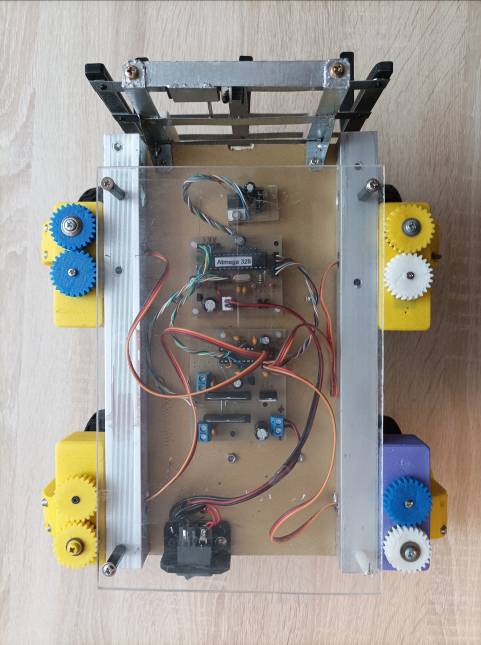
Рисунок 13. Фотография модели, общий вид, вид сверху.
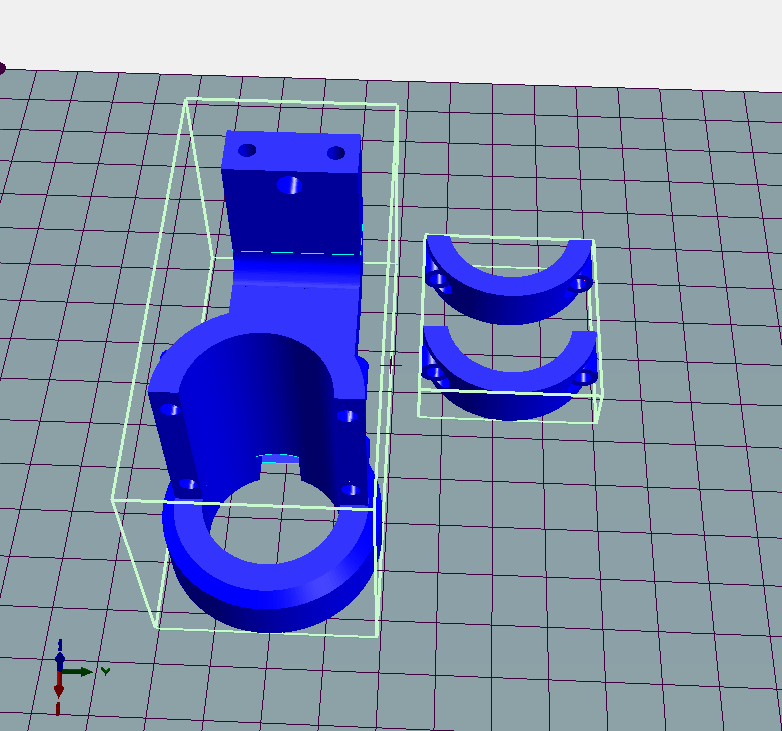
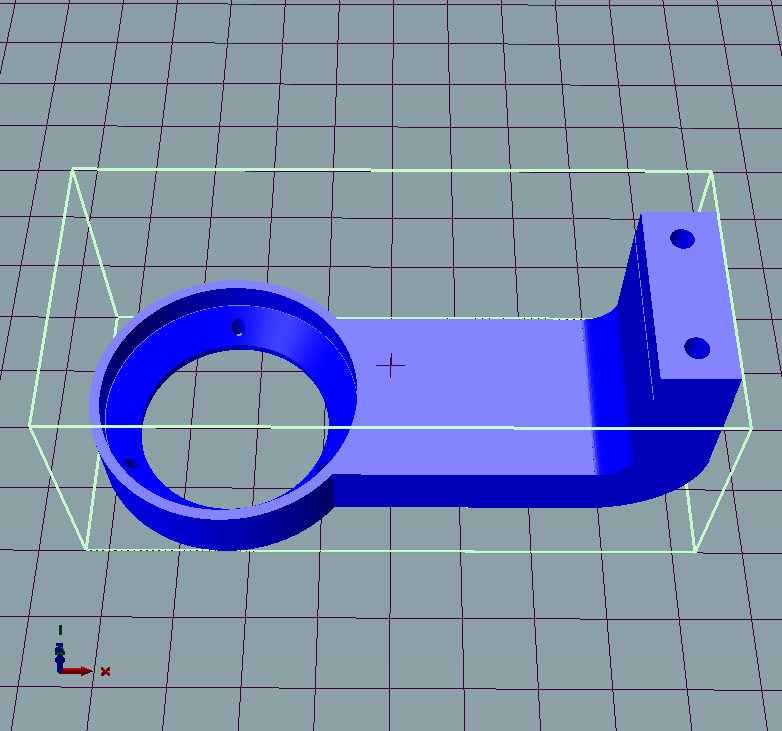
Рисунок 14. 3D детали поворотного механизма.
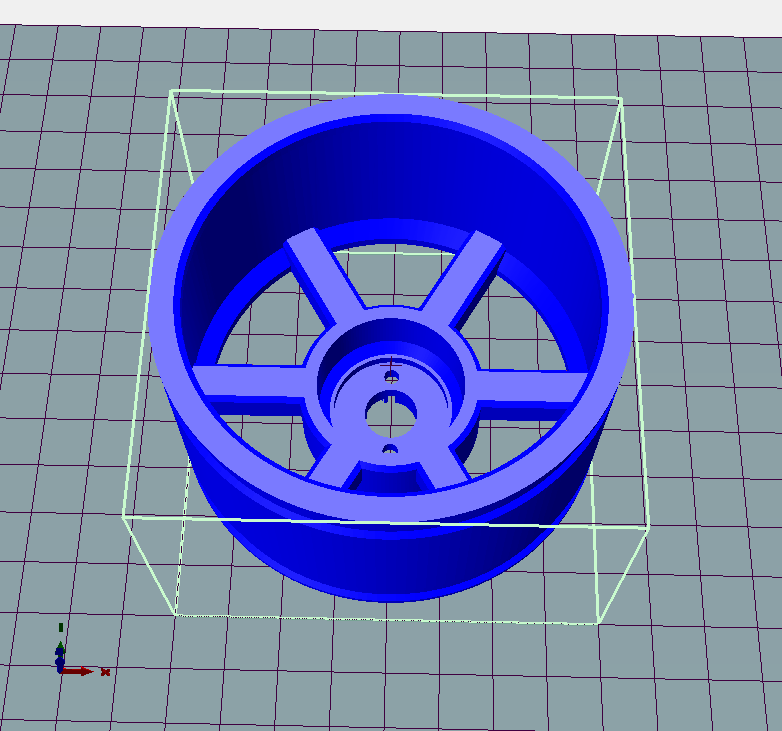
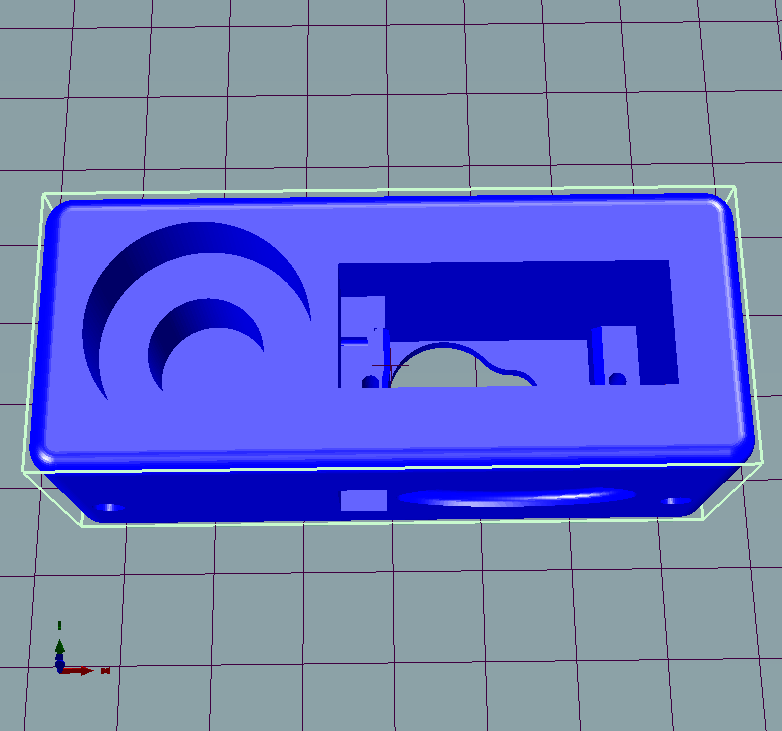
Рисунок 15. 3D детали диска колеса и рама поворотного механизма.
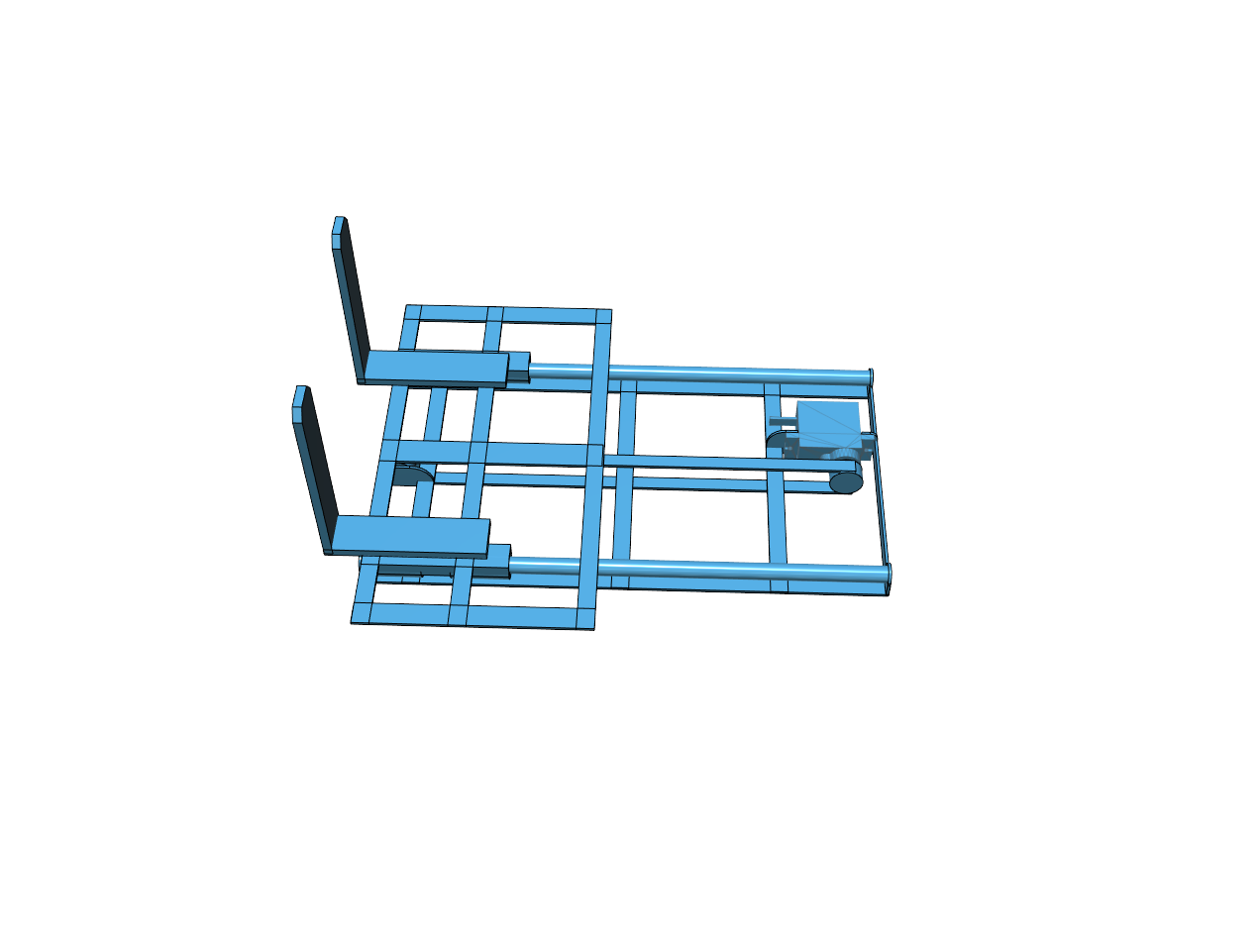
Рисунок 16. 3D деталь грузовой площадки ричтрака.
17








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

