
Россия,


СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Была в сети 27.03.2023 20:00

Лебедева Татьяна Ивановна
учитель физической культуры
Местоположение
Специализация
Рабочая программа по учебному курсу робототехника
Категория:
Внеурочка
16.02.2023 17:54

Просмотр содержимого документа
«Рабочая программа по учебному курсу робототехника»
РАБОЧАЯ ПРОГРАММА
ПО УЧЕБНОМУ КУРСУ
РОБОТОТЕХНИКА
Класс: 6
Количество часов: 35
Составила: Лебедева Татьяна Ивановна, IKK
Пояснительная записка
Программа составлена на основе
1.Федерального образовательного стандарта (ФГОС ООО);
2.Образовательной программы ФГОС ООО МКОУ Терновская ООШ, в том числе – учебного плана МКОУ Терновская ООШ;
3.Федерального перечня учебников в части, используемых для обеспечения выполнения ФГОС ООО;
4.Положения о рабочей программе МКОУ Терновская ООШ.
5. Авторской программы программы О.Л. Колпакова «Музыкальный компьютер», В.П. Жулановой «Мультимедийный проект в программе PoewrPoint», изданных в одноименных сборниках – В.: КРИПК и ПРО, 2009.
За последние годы успехи в робототехнике и автоматизированных системах изменили личную и деловую сферы нашей жизни. Роботы широко используются в транспорте, в исследованиях Земли и космоса, в хирургии, в военной промышленности, при проведении лабораторных исследований, в сфере безопасности, в массовом производстве промышленных товаров и товаров народного потребления. Многие устройства, принимающие решения на основе полученных от сенсоров данных, тоже можно считать роботами — таковы, например, лифты, без которых уже немыслима наша жизнь.
В настоящий момент для дальнейшего развития научной и промышленной робототехники необходима высокая обеспеченность инженерными кадрами. Ведение курса по робототехнике позволяет не только занять детей интересной и познавательной деятельностью, но и способствует популяризации профессии инженера. Интенсивное использование роботов в быту, на производстве и поле боя требует, чтобы пользователи обладали современными знаниями в области управления роботами, что позволит развивать новые, умные, безопасные и более продвинутые автоматизированные системы. Необходимо прививать интерес учащихся к области робототехники и автоматизированных систем.
Конструктор КЛИК и программное обеспечение к нему предоставляет прекрасную возможность учиться ребенку на собственном опыте. Такие знания вызывают у детей желание двигаться по пути открытий и исследований, а любой признанный и оцененный успех добавляет уверенности в себе. Обучение происходит особенно успешно, когда ребенок вовлечен в процесс создания значимого и осмысленного продукта, который представляет для него интерес. Важно, что при этом ребенок сам строит свои знания, а учитель лишь консультирует его.
Программное обеспечение отличается дружественным интерфейсом, позволяющим ребенку постепенно превращаться из новичка в опытного пользователя. Каждый урок - новая тема или новый проект. Модели собираются либо по технологическим картам, либо в силу фантазии детей. По мере освоения проектов проводятся соревнования роботов, созданных группами.
В конце года в творческой лаборатории группы демонстрируют возможности своих роботов.
Данный курс разработан для детей, ранее не занимающихся робототехникой. Основная форма работы – практические занятия, сочетающие в себе как освоение сформулированных в электронной среде знаний, так и элементы творческой исследовательской работы, направленной на преодоление возникших в ходе работы проблемных ситуаций.
Цель – обучение основам робототехники.
Задачи:
1. Стимулировать мотивацию учащихся к получению знаний, помогать формировать творческую личность ребенка.
2. Способствовать развитию интереса к технике, конструированию, программированию, высоким технологиям, формировать навыки коллективного труда.
3. Прививать навыки программирования через разработку программ в визуальной среде программирования, развивать алгоритмическое мышление.
Место предмета в учебном планеВ соответствии с учебным планом школы для изучения курса «Робототехника» в 6 классе выделен 1 ч/нед., что составляет 35 учебных часов в год.
Формы промежуточной аттестации
Промежуточная аттестация проводится в течение учебного года согласно учебному плану и календарному графику учебных занятий в соответствии с Положением о формах, периодичности и порядке проведения промежуточной аттестации и текущего контроля обучающихся МКОУ Терновская ООШ.
Фиксация результатов промежуточной аттестации осуществляется по пятибалльной системе. По итогам учебного года годовая отметка по предмету выставляется на основании оценок, как среднее арифметическое за все учебные четверти.
Используемые при обучении учебники и другие учебно-методические материалы
1. Правила Международных состязаний роботов
2. "Машины, механизмы и конструкции с электроприводом" книга для учителя. Научные редакторы С. Трактуева, П Якушкин.
3.«Инженерная механика» указание для учителя. Перевод М. Шапиро, С. Трактуева, В. Кузнецов.
4. Радость познания, том 4 «Человек и машины». М. Мир 1986г.
5. Базовый набор ПЕРВОРОБОТ. Книга для учителя. Перевод на русский язык. Институт новых технологий образования.
6. Конструкторы Лего Дакта в курсе информационных технологий. Введение в робототехнику. Чехлова А.В., Якушкин П.А. Москва, ИНТ 2001г.
7. ПЕРВОРОБОТ «Город и транспортные средства». Перевод на русский язык. Институт новых технологий образования.
8. «Политехнический словарь» гл. редактор И.И. Артоболевский. М.: «Советская энциклопедия» 1976г.
9. Технология и информатика: проекты и задания. ПервоРобот. Книга для учителя. - М.: ИНТ.-80с. Перевод на русский язык. Институт новых технологий.
Планируемые результаты изучения учебного курса «Робототехника»
Личностные образовательные результаты:
- формирование коммуникативной компетентности в общении и сотрудничестве со сверстниками в процессе творческой деятельности,
- формирование способности обучающихся к саморазвитию и самообучению,
- формирование осознанного выбора и построения дальнейшей образовательной траектории на основе професиональных предпочтений,
- развитие эстетического сознания через изучение правил и приемов дизайна моделей.
Метапредметные результаты
- развитие ИКТ-компетентности, т.е. приобретение опыта использования средств и методов информатики: моделирование, формализация и структурирование информации, компьютерный эксперимент
- планирование деятельности, составление плана и анализ промежуточных результатов,
- умение соотносить свои действия с планируемыми результатами, осуществлять контроль своей деятельности, корректировать свои действия в соответствии с изменяющейся ситуацией,
- владение основами самоконтроля, самооценки, принятия решений при работе в команде и индивидуально,
- умение находить необходимые для работы информационные ресурсы, оценивать полезность, достоверность, объективность найденной информации,
- приобретение опыта выполнения индивидуальных и коллективных проектов, таких как моделирование с помощью конструктора Клик
робота объекта реального мира, его программирование и исследование,
- формирование представления о развитии робототехники, основных видах профессиональной деятельности в этой сфере,
Предметные результаты
- освоение основных понятий информатики: информационный процесс, информационная модель, информационная технология, кибернетика, робот, алгоритм, информационная цивилизация и др.
- получение представления о таких методах современного научного познания как системный анализ, информационное моделирование, компьютерный эксперимент,
- повышение своего образовательного уровня и уровня готовности к продолжению обучения по выбранной образовательной траектории.
Ученик получит возможность научиться:
Принимать или намечать учебную задачу, ее конечную цель.
Прогнозировать результаты работы.
Планировать ход выполнения задания.
Рационально выполнять задание.
Руководить работой группы или коллектива.
Высказываться устно в виде сообщения или доклада.
Высказываться устно в виде рецензии ответа товарища.
Получать необходимую информацию об объекте деятельности, используя рисунки, схемы, эскизы, чертежи (на бумажных и электронных носителях);
Осуществлять простейшие операции с файлами;
Запускать прикладные программы, редакторы, тренажеры;
Представлять одну и ту же информацию различными способами;
Осуществлять поиск, преобразование, хранение и передачу информации, используя указатели, каталоги, справочники, Интернет.
Устройство компьютера на уровне пользователя;
Основные понятия, использующие в робототехнике: микрокомпьютер, датчик, сенсор, порт, разъем, ультразвук, USB-кабель, интерфейс, иконка, программное обеспечение, меню, подменю, панель инструментов;
Интерфейс программного обеспечения.
Содержание учебного курса
Раздел 1. Вводное занятие.
Показ презентации «Образовательная робототехника с конструктором КЛИК». Планирование работы на учебный год. Беседа о технике безопасной работы и поведении в кабинете и учреждении. Вводный и первичный инструктаж на рабочем месте для обучающихся.
Раздел 2. Изучение состава конструктора КЛИК.
Тема 2.1. Конструктор КЛИК и его программное обеспечение.
Знакомство с перечнем деталей, декоративных и соединительных элементов и систем передвижения. Ознакомление с примерными образцами изделий конструктора КЛИК. Просмотр вступительного видеоролика. Беседа: «Историяробототехники и её виды». Актуальность применения роботов. Конкурсы, состязания по робототехнике. Правила работы снабором-конструктором КЛИК и программным обеспечением. Основные составляющие среды конструктора. Сортировка и хранение деталей конструктора в контейнерах набора.
Тема 2.2. Основные компоненты конструктора КЛИК.
Изучение набора, основных функций деталей и программного обеспечения конструктора КЛИК. Планирование работы с конструктором. Электронные компоненты конструктора.
Тема 2.3. Сборка робота на свободную тему. Демонстрация.
Сборка модулей (средний и большой мотор, датчики расстояния, цвета и силы). Изучение причинно-следственных связей. Сборка собственного робота без инструкции. Учим роботов двигаться.
Раздел 3. Изучение моторов и датчиков.
Тема 3.1. Изучение и сборка конструкций с моторами.
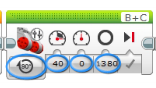
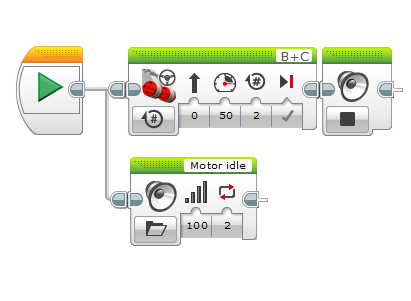
Внешний вид моторов. Конструирование экспресс-бота. Понятие сервомотор. Устройство сервомотора. Порты для подключения сервомоторов. Положительное и отрицательное движение мотора. Определение направления движения моторов. Блоки «Большой мотор» и «Средний мотор». Выбор порта, выбор режима работы (выключить, включить, включить на количество секунд, включить на количество градусов, включить на количествооборотов), мощность двигателя. Выбор режима остановки мотора.
Тема 3.2. Изучение и сборка конструкций с датчиком расстояния.
Понятие«датчик расстояния»и их виды. Устройство датчика расстояния ипринцип работы. Выбор порта и режима работы. Сборка простых конструкций с датчиками расстояний.
Тема 3.3. Изучение и сборка конструкций с датчиком касания, цвета.
Внешний вид. Режим измерения. Режим сравнения. Режим ожидания. Изменение в блоке ожидания. Работа блока переключения с проверкой состояния датчика касания. Сборка простых конструкций сдатчиком касания. Датчик цвета предмета. Внешний вид датчика и его принцип работы. Междисциплинарные понятия: причинно- следственная связь. Изучение режимов работы датчика цвета. Сборка простых конструкций с датчиками цвета.
Раздел 4. Конструирование робота.
Тема 4.1. Сборка механизмов без участия двигателей и датчиков по инструкции.
Изучение механизмов. Первые шаги. Зубчатые колеса. Промежуточное зубчатое колесо. Коронные зубчатые колеса. Понижающая зубчатая передача. Повышающая зубчатая передача. Шкивы и ремни. Перекрестная ременная передача. Снижение, увеличение скорости. Червячная зубчатая передача, кулачок, рычаг. Сборкапростых конструкций по инструкции.
Тема 4.2. Конструирование простого робота по инструкции.
Сборка по инструкции. Разбор готовой программы дляробота. Запуск робота на соревновательном поле. Доработка.
Тема 4.3. Сборка механизмов с участием двигателей и датчиков по инструкции.
Сборка различных механизмов с участием двигателей и датчиков поинструкции.
Раздел 5. Создание простых программ через меню контроллера.
Тема 5.1 Понятие «программа», «алгоритм». Написание простейших программ для робота по инструкции.
Алгоритм движения робота по кругу, вперед-назад, «восьмеркой» и пр. Написание программы по образцу для движения по кругу через меню контроллера. Запуск и отладка программы. Написание других простых программ на выбор учащихся и ихсамостоятельная отладка.
Тема 5.2 Написание программ для движения робота через меню контроллера.
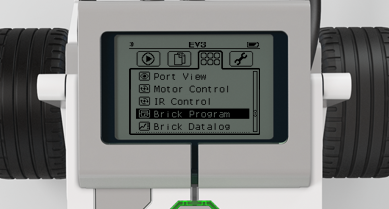
Характеристикимикрокомпьютера КЛИК. Установка аккумуляторов в блок микрокомпьютера. Технология подключения к микрокомпьютеру (включение и выключение, загрузка и выгрузка программ, порты USB, входа и выхода). Интерфейс и описание КЛИК (пиктограммы, функции, индикаторы). Главное меню микрокомпьютера. Создание пробных программ для робота черезменю контроллера.
Раздел 6. Знакомство со средой программирования КЛИК.
Тема 6.1. Понятие «среда программирования», «логические блоки».
Понятие «среда программирования», «логические блоки». Показ написания простейшей программы для робота. Интерфейс программы КЛИК и работа с ним. Написание программы для воспроизведениязвуков и
изображения по образцу.
Тема 6.2. Интерфейс среды программирования КЛИК и работа с ней.
Общее знакомство с интерфейсом ПО. Самоучитель. Панель
инструментов. Палитра команд. Рабочее поле. Окно подсказок. Окно микрокомпьютера КЛИК. Панель конфигурации.
Тематическое планирование
| № занятия | Тема занятия | Теоретическая часть | Практическая часть | Дата |
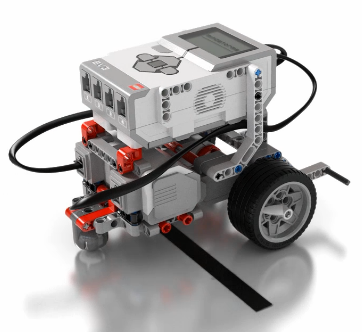
| | Вводное занятие. ТБ. | Понятие «робот», «робототехника». Применение роботов в различных сферах жизни человека, значение робототехники. Просмотр видеофильма о роботизированных системах вооружения стран НАТО. | Ознакомление с комплектом деталей для изучения робототехники: контроллер, сервоприводы, соединительные кабели, датчики-касания, ультразвуковой, освещения и цвета. Порты подключения. Создание приводной платформы. |
|
| | Ознакомление с визуальной средой программирования. | Понятие «среда программирования», «логические блоки». Показ написания простейшей программы для робота Понятие «программа», «алгоритм». Алгоритм движения робота по прямой.
| Интерфейс программы LEGO MINDSTORMS Education EV3 и работа с ним. Написание программы для перемещения по прямой по образцу, настройка конфигурации режимов программируемых блоков, параметров и значений. |
|
| | Движение по кривой. | Написание линейной программы. Понятия «Рулевое управление», «мощность»,
| Использование блока «Рулевое управление» для управления приводной платформой. Загрузка программы в модуль EV3 и ее тестирование. Самостоятельное программирование возвращения приводной платформы в начальное положение. |
|
| | Независимое управление моторами. | Понятие «Независимое управление моторами», принципы его использования
| Использование блока «Независимое управление моторами» для управления приводной платформой. |
|
| | Освобождение кубоида. | Блоки управления средними моторами.
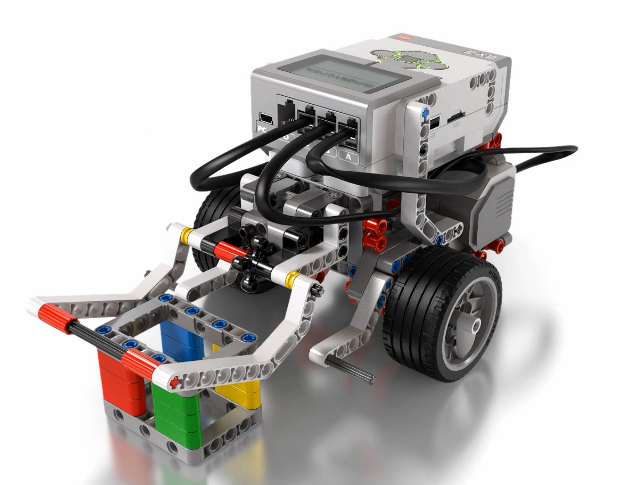
| Внесение изменений в конструкцию приводной платформы. Программирование приводной базы таким образом, чтобы переместить и освободить кубоид |
|
| | Стоп-линия для робота. | Понятие яркости отраженного света. Знакомство с датчиком цвета.
| Внесение изменений в конструкцию приводной платформы. Использование датчика цвета для остановки приводной платформы при обнаружении линии. |
|
| | Ориентация в пространстве. | Знакомство с гироскопическим датчиком, правила работы с ним. Принципы его управления.
| Использование гироскопического датчика для поворота на 45 градусов. Самостоятельное программирование поворота на заданное количество градусов. Внесение изменений в конструкцию приводной платформы. |
|
| | «Глаз» летучей мыши. | Знакомство с ультразвуковым датчиком и режимом «Ожидание изменения». Принципы его управления. Измерение расстояния до препятствия.
| Использование режима ультразвукового датчика «Ожидание изменения» для определения приближения к объекту. Внесение изменений в конструкцию приводной платформы. |
|
| | Программирование на модуле EV3 | Интерфейс приложения для программирования на EV3.
| Знакомство с приложением для программирования на модуле EV3. Создайте программу для приводной платформы. |
|
| | И танцую и пою. | Понятие параллельного программирования. Выбор и подключение звукового файла для воспроизведения.
| Использование многозадачности для перемещения приводной платформы и воспроизведения звука одновременно. |
|
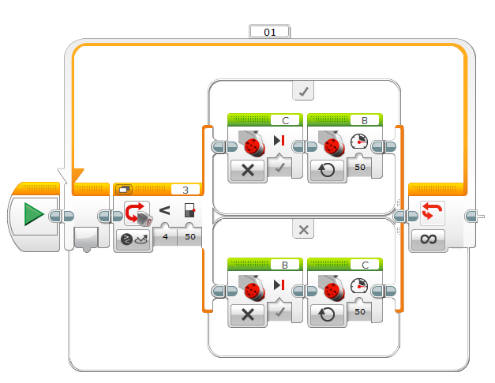
| 5 | Первая программа с циклом | Написание программы с циклом. Понятие «цикл». Использование блока «цикл» в программе. Знакомство с датчиком касания
| Создание и отладка программы с использованием блока цикла для повторения серии действий. Эксперимент с циклом в режиме «Цикл неограничен» |
|
| | Движение вдоль линии | Знакомство с ветвящимися алгоритмическими структурами. Настройка датчика цвета.
| Использование блока переключения для принятия решений в динамическом процессе на основании информации датчика |
|
| | Соревнования роботов | Робототехнические соревнования
| Соревнования роботов на тестовом поле № 8547. Зачет времени и количества ошибок |
|
| | Управление цветом | Использование датчика цвета в режиме «Определить цвет» | Программирование приводной базы таким образом, чтобы она двигалась и поворачивала при обнаружении различных цветов. Самостоятельное изменение программы, чтобы робот по красному сигналу останавливался. |
|
| | Шины данных | Понятие шины данных, ее назначение. | Самостоятельный эксперимент с тремя типами шин данных |
|
| | Робот-танцор | Понятие «генератор случайных чисел». Использование блока «случайное число» для управления движением робота
| Использование блока случайной величины для перемещения приводной платформы со случайно выбранной скоростью и в случайно выбранном направлении |
|
| | Робот «просыпается» | Освещенность, использование числового ввода параметров блока движения, измеренных с помощью датчиков.
| Использование блоков датчика для управления мощностью моторов приводной платформы в динамическом режиме. |
|
| | Измерительный прибор. |
| Отображение показаний ультразвукового датчика в режиме реального времени и их объединение с текстом. Самостоятельный эксперимент с измерением угла наклона гироскопа. |
|
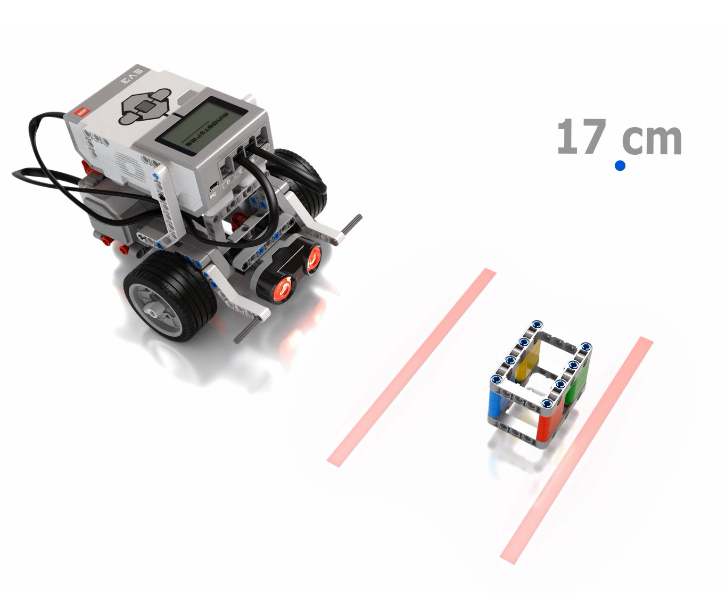
| | Робот-преследователь |
| Использование ультразвукового датчика для перемещения приводной платформы вперед при нахождении кубоида в указанном диапазоне. Эксперимент с установкой блока диапазона в режим «Вне пределов» |
|
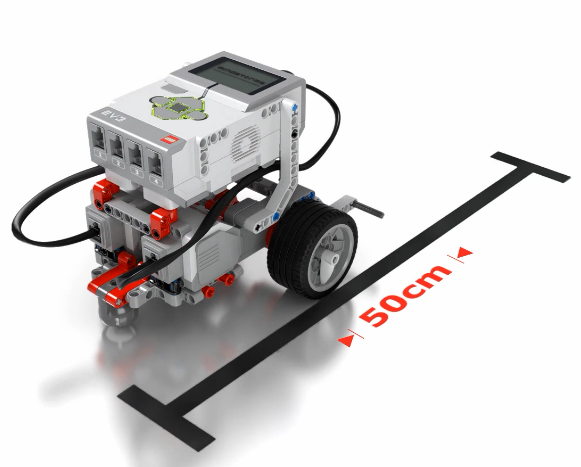
| | Измеряем скорость | Конструирование формулы и расчет по произведенным измерениям.
| Использование математического блока для расчета скорости приводной платформы. |
|
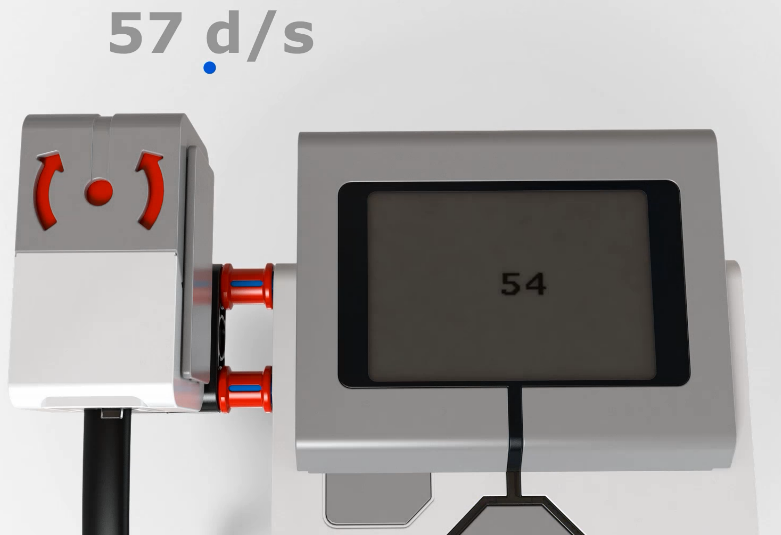
| | Эксперимент с вращением |
| Эксперимент со скоростью поворота, используя гироскопический датчик. Можно ли поворачивать модуль EV3 таким образом, чтобы значение оставалось постоянным и составляло 90 град/с? |
|
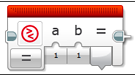
| | Сравнение | Отношения «больше», «меньше» и «равно»
| Использование датчик цвета для включения моторов приводной платформы при обнаружении определенных цветов. Эксперимент с изменением режима блока «Сравнение» на «Больше чем». |
|
| | Управление касанием. | Понятие переменной. Ввод значения переменной.
| Использование переменной для хранения числа оборотов, которое совершат моторы приводной платформы. |
|
| | Калибровка датчика цвета. |
| Выполнение калибровки датчика цвета в режиме «Освещение», чтобы увеличить чувствительность. |
|
| | «Поговорим?» | Переименование модуля EV3. Блок «Обмен сообщениями».
| Установление соединения посредством Bluetooth между двумя модулями. Отправляйте сообщения от одного модуля EV3 другому |
|
| | Основы логики | Логическое И/ИЛИ. Таблицы истинности.
| Эксперимент с логическими И/ИЛИ в условии. |
|
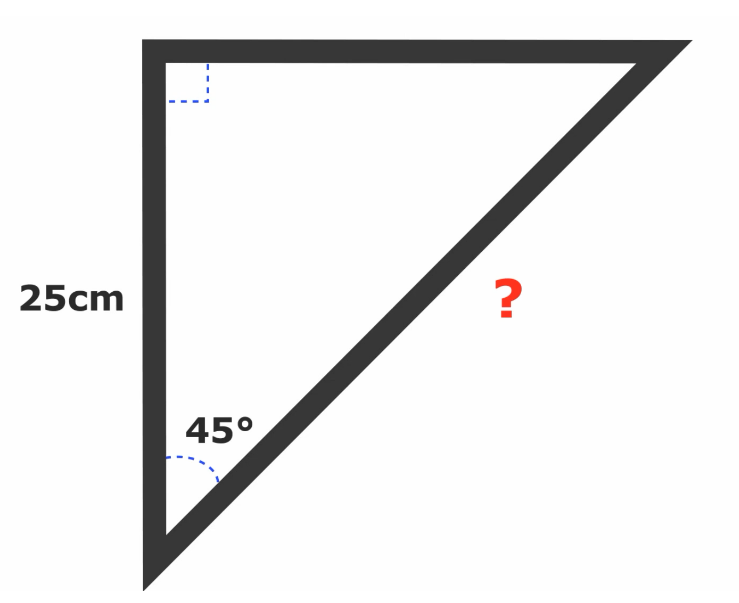
| | Математика – дополнительные возможности. | Соотношение углов и сторон прямоугольно треугольника.
| Использование принципов тригонометрии для управления движением приводной платформы. |
|
| | Массивы. | Понятие массива. Организация массива в EV3. Считывание массива при помощи сочетания датчиков цвета и касания. (цвет – индекс элемента массива, количество касаний – значение элемента массива).
| Использование нескольких значений, сохраненных в памяти модуля EV3, для управления движением приводной платформы. |
|
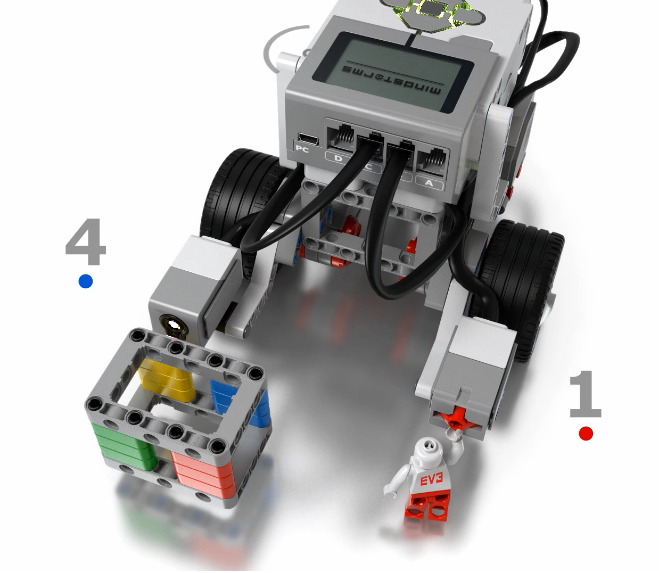
| | Гиробой - конструируем | Функциональные особенности робота «Гиробой»
| Конструирование самобалансирующегося робота с использованием всех моторов и датчиков EV3 |
|
| | Гиробой - программируем | Разбор структуры готовой программы для Гиробоя
| Программирование самобалансирующегося робота с использованием всех моторов и датчиков EV3, а также дополнительными средствами программирования для управления его действиями. |
|
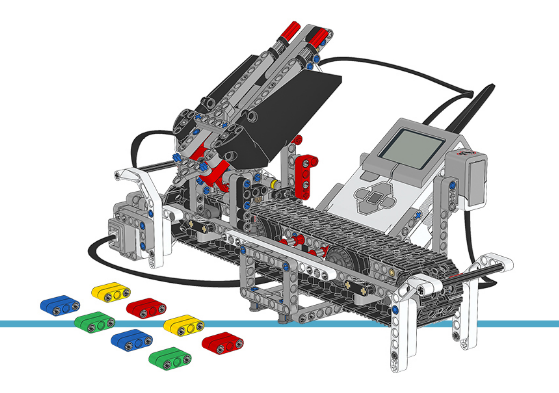
| | Сортировщик цветов - конструируем | Функциональные особенности робота «Сортировщик цветов»
| Конструирование сортировщика цветных элементов с использованием датчика цвета, датчика касания и моторов для управления |
|
| | Сортировщик цветов - программируем | Разбор структуры готовой программы для «Сортировщика цветов»
| Программирование сортировщика цветных элементов с использованием датчика цвета, датчика касания и моторов для управления |
|
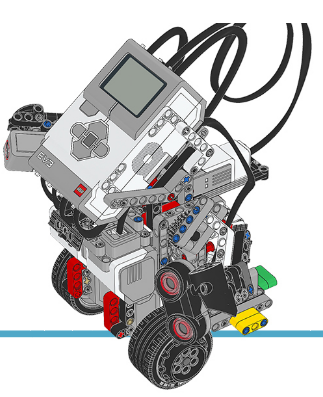
| | Щенок – конструируем Щенок - программируем | Функциональные особенности робота «Щенок»
| Конструирование робота «Щенка» с использованием датчика цвета и касания. Программирование щенка с использованием датчика цвета, датчика касания, а также дополнительными средствами программирования для управления его действиями. |
|
| | Защита проекта «Мой собственный уникальный робот» |
| Создание собственных роботов учащимися и их презентация |
|







 Разбор структуры готовой программы для «Щенка»
Разбор структуры готовой программы для «Щенка»








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

