
Россия, Омск

СДЕЛАЙТЕ СВОИ УРОКИ ЕЩЁ ЭФФЕКТИВНЕЕ, А ЖИЗНЬ СВОБОДНЕЕ
Благодаря готовым учебным материалам для работы в классе и дистанционно
Скидки до 50 % на комплекты
только до
Готовые ключевые этапы урока всегда будут у вас под рукой
Организационный момент
Проверка знаний
Объяснение материала
Закрепление изученного
Итоги урока

Был в сети 28.04.2020 17:53

Жердев Валерий Анатольевич
Преподаватель
61 год
Местоположение
Лекции по навигации
Категория:
Прочее
26.03.2020 09:36

Просмотр содержимого документа
«2.3 ЭКНИС»
Просмотр содержимого документа
«Копия 2.3 ЭКНИС»
Просмотр содержимого документа
«Лекция Т.1.1.»
Пояснительная записка
Настоящий курс лекций предназначен для курсантов специальности СПО 180403 Судовождение по укрупненной группе специальностей 180000 Морская техника в части освоения основного вида профессиональной деятельности (ВПД): техник-судоводитель и соответствующих профессиональных компетенций (ПК).
Конспект содержит необходимый материал по всем разделам курса, некоторые лекции сопровождаются презентациями.
В результате освоения учебной дисциплины обучающийся должен:
С целью овладения указанным видом профессиональной деятельности и соответствующими профессиональными компетенциями обучающийся в ходе освоения профессионального модуля должен:
иметь практический опыт:
- аналитического и графического счисления;
- определения места судна визуальными, астрономическими способами и с использованием радионавигационных приборов и систем;
- предварительной проработки и планирования рейса судна и перехода с учётом гидрометеорологических условий плавания, руководств и пособий для плавания;
- использования и анализа информации о местонахождении судна;
- навигационной эксплуатации и технического обслуживания радиоэлектронных и технических систем судовождения и связи, решения навигационных задач с использованием информации от этих систем, расчёта поправок навигационных приборов;
- определения поправки компаса;
уметь:
- определять координаты пунктов прихода, разность широт и разность долгот, дальность видимости ориентиров;
- решать задачи на перевод и исправление курсов и пеленгов;
- свободно читать навигационные карты;
- вести графическое счисление пути судна на карте с учётом поправки лага и циркуляции, дрейфа судна от ветра, сноса судна течением, совместного действия ветра и течения, вести простое и составное аналитическое счисление пути судна;
- вести прокладку пути судна на карте с определением места визуальными способами и с помощью радиотехнических средств;
- определять местоположение судна с помощью спутниковых навигационных систем;
- ориентироваться в опасностях и особенностях района при плавании вблизи берега и в узкостях;
- производить предварительную прокладку по маршруту перехода;
- производить корректуру карт, лоций и других навигационных пособий для плавания;
- рассчитывать элементы прилива с помощью таблиц приливов, составлять график прилива и решать связанные с ним штурманские задачи;
- рассчитывать среднюю квадратическую погрешность (СКП) счислимого и обсервованного места, строить на карте площадь вероятного места нахождения судна;
- определять гидрометеорологические элементы в результате наблюдений;
- составлять радиотелеграммы для передачи гидрометеоданных в центры сбора;
- составлять краткосрочные прогнозы в результате анализа параметров наблюдений и их изменения;
- использовать гидрометеоинформацию для обеспечения безопасности плавания;
знать:
- Основные понятия и определения навигации;
- Назначение, классификацию и компоновку навигационных карт;
- Электронные навигационные карты;
- Судовую коллекцию карт и пособий, их корректуру и учет;
- Определение направлений и расстояний на картах;
- Выполнение предварительной прокладки пути судна на картах;
- Условные знаки на навигационных картах;
- Графическое и аналитическое счисление пути судна и оценку его точности;
- Методы и способы определения места судна визуальными способами с оценкой их точности;
- Мероприятия по обеспечению плавания судна в особых условиях, выбор оптимального маршрута;
- Средства навигационного оборудования и ограждения;
- Навигационные пособия и руководства для плавания;
- Учет приливно-отливных течений в судовождении;
- Руководство для плавания в сложных условиях;
- Организацию штурманской службы на судах;
- Физические процессы, происходящие в атмосфере и мировом океане, устройство гидрометеорологических приборов, используемых на судах;
Тема 1.1. Основные понятия и определения.
План лекции №1
1.Форма и размеры Земли.
2.Основные точки, линии и плоскости на Земном шаре.
3.Географические координаты.
4.Морские единицы измерения скорости и пройденного расстояния.
5.Видимый горизонт. Дальность видимого горизонта, объектов и огней.
Цель занятия:
Знать:
- основные точки, линии и плоскости на Земном шаре;
- географические координаты;
- морские единицы измерения скорости и пройденного расстояния;
- видимый горизонт;
- дальность видимости горизонта, объектов и огней.
Уметь:
- определять координаты пунктов прихода;
- определять разность широт и разность долгот;
- определять дальность видимости ориентиров.
1.Форма и размеры Земли.
Вряд ли нужно много писать о форме Земли. Всем ясно, что Земля представляет собой шар, слегка сплюснутый у полюсов, т. е. так называемый эллипсоид. Однако правильное, современное представление о форме и размерах Земли было достигнуто далеко не сразу и достигалось порою в тяжелой борьбе науки с религией.
На протяжении ряда веков, через дебри схоластики и религии средневековья, пробивала себе путь истина.
Однако за последние десятилетия накопился огромный материал; появилась возможность уточнить прежние данные о форме и размерах Земли. К тридцатым годам была выполнена работа по пересмотру всех новых данных, и в 1936 г. советский ученый Ф. Н. Красовский опубликовал новые цифры, характеризующие размеры земного эллипсоида еще точнее.
Эллипсоид Ф. Н. Красовского имеет следующие размеры (рис. 3): большая полуось, т. е. расстояние от центра Земли до экватора, равна 6 378 254 метрам; малая полуось, т. е расстояние от центра Земли до одного из полюсов равна 6 356 863 метрам. Таким образом полярный радиус (от центра к полюсу) короче экваториального радиуса (от центра к экватору) приблизительно на 21 км. Отсюда следует, что Земля действительно эллипсоид вращения, т. е. шар, сплюснутый, хотя и очень незначительно, у полюсов. Величина сжатия, вызванного вращением Земли вокруг своей оси, равна 1 : 298,3. Итак, в первом, и достаточно хорошем, приближении Земля должна быть принята за эллипсоид вращения, элементы которого опубликованы в 1936 г. и которые приняты в Советском Союзе в качестве официальных, т. е. обязательных для использования во всех специальных работах.
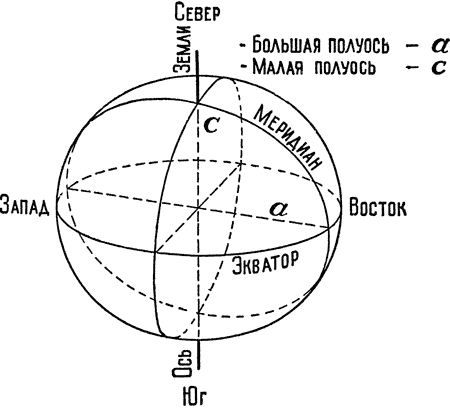
Рис. 3. Земля — эллипсоид вращения;
а — большая полуось; с — малая полуось.
Экваториальный диаметр = 12 756,5 километра Полярный диаметр = 12 713,7 километра Длина окружности меридиана = 40 008,6 километра Длина окружности экватора = 40 075,7 километра Поверхность Земли = 510 миллионам квадратных километров Объем Земли = 1080 миллиардам кубических километров
2.Основные точки, линии и плоскости на Земном шаре.
Ось вращения Земли PNPS пересекается с земной поверхностью в двух точках, которые называются географическими, или истинными, полюсами: северным РN (рис. l) и южным Ps. Любая плоскость, проходящая через ось Земли, называется плоскостью истинного меридиана. В пересечении с поверхностью Земли эти плоскости образуют меридианы.
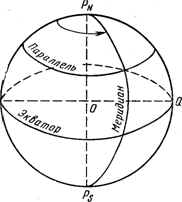
Рис. l. Основные точки и линии земного шара
Плоскость, перпендикулярная оси вращения Земли и проходящая через центр Земли, называется плоскостью экватора. В пересечении с поверхностью Земли она образует линию экватора EQ. Экватор делит Землю на два полушария — северное и южное.
Плоскости, параллельные плоскости экватора, при пересечении земной поверхности образуют малые круги, называемые параллелями. Все меридианы и параллели пересекаются под прямыми углами.
Представим себе наблюдателя, находящегося на земной поверхности в точке А (рис. 2). Отвесная линия zА, проходящая через место наблюдателя, указывает направление zn (зенит—надир).
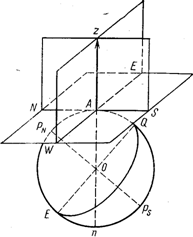 Рис.2. Плоскости и линии наблюдателя
Рис.2. Плоскости и линии наблюдателя
Плоскость, проходящая через точку А и перпендикулярная отвесной линии zn, называется плоскостью истинного горизонта наблюдателя.
Любая плоскость, проходящая через отвесную линию, будет вертикальной плоскостью. Вертикальная плоскость, проходящая через место наблюдателя и земные полосы pn и ps, называется плоскостью истинного меридиана наблюдателя. В пересечении с плоскостью истинного горизонта она образует направление N — S.
Вертикальная плоскость, проходящая через точку наблюдателя и перпендикулярная плоскости истинного меридиана наблюдателя, называется плоскостью первого вертикала. В пересечении с плоскостью истинного горизонта плоскость первого вертикала образует линию Е — W.
3.Географические координаты.
Для определения положения какой-либо точки на поверхности Земли применяют географические координаты — широту и долготу.
Географической широтой называется центральный угол между отвесной линией точки А (рис. 3) и ее проекцией на плоскость экватора. Широта измеряется дугой меридиана, заключенной между экватором и параллелью данной точки к N или к S от 0° до 90°. Широта может иметь наименование северной (нордовой) N или южной (зюйдовой) S.
Географической долготой называется двугранный угол, заключенный между плоскостью начального меридиана (Гринвичского) и плоскостью меридиана, проходящего через данную точку А.
Долгота измеряется дугой экватора от начального меридиана до меридиана данной точки от 0° до 180° к востоку или к западу. Относительно начального меридиана долгота имеет наименование восточной (Е) или западной (W).
Условно географической северной широте и восточной долготе приписывается знак (+). Географической южной широте и западной долготе приписывается знак минус (—). Географическая широта обозначается греческой буквой φ, а долгота — греческой буквой λ.
Совершая плавание из одной точки в другую, судно непрерывно меняет широту и долготу.
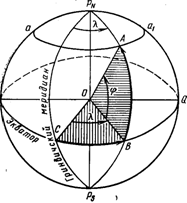
Рис.3. Географические координаты- широта и долгота:
EQ-экватор; aa1-парралель; О- центр Земли; С и В – точки пересечения Гринвического меридиана и меридиана данной точки А
Допустим, что координаты пункта отхода А будут φ1 и λ1, а координаты пункта прихода В—φ2 и λ2 (рис. 4). Изменения широты и долготы называются соответственно разностью широт (РШ) и разностью долгот (РД).

Рис. 4. Разность широт и разность долгот
Разность широт измеряется дугой меридиана от параллели точки отшествия (А) до параллели точки пришествия (В):
РШ φ2-φ1
Разность широт измеряется от 0° до 180° к северу (норду) или к югу (зюйду) и имеет наименование «к N»—знак плюс (+) или «к S» — знак минус (—).
Задачи та определение РШ удобно решать со знаками, контролируя решение вспомогательным чертежом.
Можно решать задачи по нахождению широты точек А или В, если известна РШ:
φ1=φ2-РШ; φ2=φ1+РШ.
Эти формулы алгебраические.
Разность долгот (РД) измеряется наименьшей дугой экватора, заключенной между меридианом точки отшествия и меридианом точки пришествия. Разность долгот измеряется от 0° до 180° к востоку Е или к западу (W).
Разности долгот условно присваивается знак плюс (+), если она сделана к востоку, и знак минус (—), если к западу.
Алгебраическая формула разности долгот следующая:
РД=λ2-λ1.
Контролировать правильность решения можно вспомогательным чертежом.
Если РД, рассчитанная по формуле, получилась больше 180°, нужно взять дополнение до 360° и изменить наименование РД на обратное.
4.Морские единицы измерения скорости и пройденного расстояния.
Единицей измерения расстояний на море является морская миля, равная линейной длине 1' дуги меридиана земного шара, т. е. 1852 м 66070 фут. Кроме морской мили, для измерения расстояния на море приняты также следующие единицы длины:
Скорость морского судна измеряют узлами , т. е. количеством морских миль, которое оно проходит за 1 ч. Говорят, например, что судно имеет скорость 12 узлов, т. е. оно проходит 12 морских миль в час.
При плавании по внутренним водным путям часто применяют метрические единицы измерения расстояния и скорости. Перевод морских миль в километры и обратно осуществляется по следующим формулам:
S км= 1,852 морских миль; 5 морских миль = 0,54 км.
По аналогичным формулам делают перевод узлов в км/ч, в м/сек и обратно:
V км/ч =.1,852 узлов; V узлов = 0,5400 км/ч;
V м/сек — 0,5145 узлов; V узлов = 1,943 м/сек.
В Мореходных таблицах МТ-63 помещены сравнительные таблицы скоростей (табл. № 37), облегчающие указанный перевод.
5.Видимый горизонт. Дальность видимого горизонта, объектов и огней.
Видимый горизонт, в отличие от истинного горизонта, представляет собой окружность, образованную точками касания лучей, проходящих через глаз наблюдателя касательно к земной поверхности. Представим, что глаз наблюдателя (рис. 8) находится в точке А на высоте ВА=е над уровнем моря. Из точки А можно провести бесчисленное количество лучей Ac, Ac¹, Ас², Ас³ и т. д., касательных к поверхности Земли. Точки касания с, с¹ с² и с³ образуют окружность малого круга.
Сферический радиус Вс малого круга с с¹с²с³ называется теоретической дальностью видимого горизонта.
Величина сферического радиуса находится в зависимости от высоты глаза наблюдателя над уровнем моря.
Так, если глаз наблюдателя будет находиться в точке A1 на высоте ВА¹ = е¹ над уровнем моря, то и сферический радиус Вс' будет больше сферического радиуса Вс.
Чтобы определить зависимость между высотой глаза наблюдателя и теоретической дальностью его видимого горизонта, рассмотрим прямоугольный треугольник АОс:
Ас² = АО² — Ос²; АО = OB + е; OB = R,
тогда АО = R + е; Ос = R.
Вследствие незначительности высоты глаза наблюдателя над уровнем моря по сравнению с размерами радиуса Земли длину касательной Ас может принять равной величине сферического радиуса Вс и, обозначив теоретическую дальность видимого горизонта через DT получим
D2T = (R + e)² - R² = R² + 2Re + e² — R² = 2Re + e²,
или
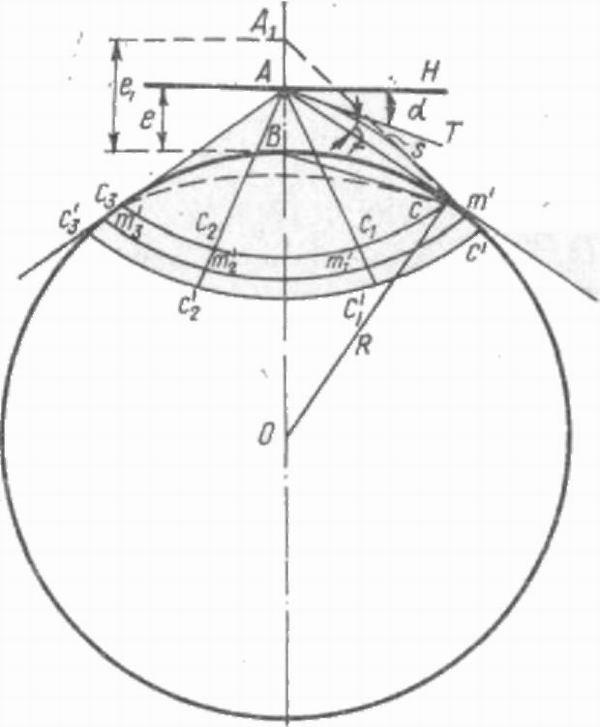
Рис. 8
Учитывая, что высота глаза наблюдателя е на судах не превышает 25 м, a 2R = 12 742 220 м, отношение е/2R настолько мало, что без ущерба для точности им можно пренебречь. Следовательно,
так как е и R выражаются в метрах, то и Dт получится тоже в метрах. Однако действительная дальность видимого горизонта всегда больше теоретической, так как луч, идущий от глаза наблюдателя к точке, находящейся на земной поверхности, из-за неодинаковой плотности слоев атмосферы по высоте преломляется.
В данном случае луч от точки А к с идет не по прямой Ас, а по кривой ASm' (см. рис. 8). Поэтому наблюдателю точка с представляется видимой по направлению касательной AT, т. е. приподнятой на угол r = L ТАс, называемый углом земной рефракции. Угол d = L HAT называют наклонением видимого горизонта. И на самом деле, видимым горизонтом будет являться малый круг m', m'2, тз', с несколько большим сферическим радиусом (Bm' Вс).
Величина угла земной рефракции не является постоянной и зависит от преломляющих свойств атмосферы, которые изменяются от температуры и влажности воздуха, количества в воздухе взвешенных частиц. В зависимости от времени года и даты суток она также изменяется, поэтому действительная дальность видимого горизонта по сравнению с теоретической может увеличиваться до 15%.
В навигации увеличение действительной дальности видимого горизонта по сравнению с теоретической принимают 8%.
Поэтому, обозначив действительную, или, как еще ее называют, географическую, дальность видимого горизонта через De, получим:

Чтобы получить Dе в морских милях (принимая R и е в метрах), радиус земли R, так же как и высоту глаза е, делим на 1852 (1 морская миля равна 1852 м). Тогда

Чтобы получить результат в километрах, вводим множитель 1,852. Тогда
![]()
дл я облегчения расчетов по определению дальности видимого горизонта в табл. 22-а (МТ—63) дана дальность видимого горизонта в зависимости от е, в пределах от 0,25 до 5100 м, рассчитанная по формуле (4а).
Если действительная высота глаза не совпадает с числовыми значениями, указанными в таблице, то дальность видимого горизонта может быть определена линейным интерполированием между двумя близкими к действительной высоте глаза величинами.
Дальность видимости предметов и огней
Дальность видимости предмета Dn (рис. 9) будет складываться из двух дальностей видимого горизонта, зависящих от высоты глаза наблюдателя (De) и высоты предмета (Dh), т. е.
![]()
Она может быть определена по формуле

где h — высота ориентира над уровнем воды, м.
Для облегчения определения дальности видимости предметов пользуются табл. 22-в (МТ—63), рассчитанной по формуле (5а): Чтобы определить по этой таблице, с какого расстояния откроется предмет, необходимо знать высоту глаза наблюдателя над уровнем воды и высоту предмета в метрах.
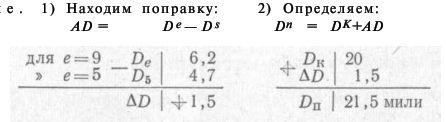
Дальность видимости предмета можно также определить по специальной номограмме (рис. 10). Например, высота глаза над уровнем воды 5,5 м, а высота h обстановочного знака 6,5 м, чтобы определить Dn , к номограмме прикладывают линейку так, чтобы она соединяла на крайних шкалах точки, соответствующие h и е. Точка пересечения линейки со средней шкалой номограммы покажет искомую дальность видимости предмета Dn (на рис. 10 Dn = 10,2 мили).
В пособиях по судовождению — на картах, в лоциях, в описаниях огней и знаков — дальность видимости предметов DK указывается при высоте глаза наблюдателя 5 м (на английских картах — 15 футов).
В том случае, когда действительная высота глаза наблюдателя другая, необходимо ввести поправку AD (см. рис. 9).
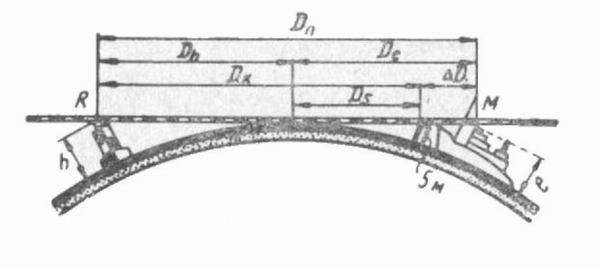
Рис. 9
Пример. Дальность видимости предмета, указанная на карте, DK = 20 милям, а высота глаза наблюдателя е = 9 м. Определить действительную дальность видимости предмета Dn с использованием табл. 22-а (МТ —63). Решение.
В ночное время дальность видимости огня зависит не только от его высоты над уровнем воды, но также от силы источника освещения и от разряда осветительного аппарата. Обычно осветительный аппарат и сила источника освещения рассчитываются таким образом, чтобы дальность видимости огня ночью соответствовала действительной дальности видимости горизонта с высоты огня над уровнем моря, но бывают и исключения.
Поэтому огни имеют свою «оптическую» дальность видимости, которая может быть больше или меньше дальности видимости горизонта с высоты огня.
В пособиях по судовождению указывается действительная (математическая) дальность видимости огней, но если она больше оптической, то указывается последняя.
Дальность видимости береговых знаков судоходной обстановки зависит не только от состояния атмосферы, но и от многих других факторов, к которым относятся:
а) топографические (определяются характером окружающей местности, в частности преобладанием того или иного цвета в окружающем ландшафте);
б) фотометрические (яркость и цвет наблюдаемого знака и фона, на котором он проектируется);
в) геометрические (расстояние до знака, его размеры и форма).
Контрольные вопросы:
1. Какова форма Земли?
2. Плоскость экватора?
3. Плоскость истинного меридиана?
4. Плоскость истинного горизонта наблюдателя?
5. Широта места?
6. Долгота места?
7. Формула расчета дальности видимости огней?
Практическое занятие
Вычисление географических координат, дальности видимого горизонта, объектов и огней. (2 часа)
Просмотр содержимого документа
«Лекция Т.1.10.»
Тема 1.10.Определение места судна с использованием радиотехнических средств судовождения.
План лекции № 15
1.Классификация РТСС.
2.Навигационные параметры РТСС.
3.Способы определения места.
Цель занятия:
Знать:
- методы и способы определения места судна с использованием радиотехнических средств судовождения.
Уметь:
- вести прокладку пути судна на карте с определением места визуальными способами и с помощью радиотехнических средств;
- определять местоположение судна с помощью спутниковых навигационных систем.
1.Классификация РТСС
Совокупность электроаппаратуры, предназначенной для определения направления, скорости и пройденного судном относительно Земли расстояния, принято называть электронавигационными приборами.
В соответствии с основным назначением эти приборы подразделяются на три основные группы:
- приборы для определения направлений в море, использующие свойства гироскопа (гироскопические компасы, гироазимуты и др.) ; автоматические устройства, обеспечивающие современное судовождение — автоматические счислители, прокладчики и рулевые (авторулевые);
- приборы для измерения глубины и обнаружения подводных препятствий, базирующиеся на свойстве акустических колебаний при распространении их в воде отражаться от различных объектов (эхолоты, гидролокаторы);
- приборы для измерения скорости и проходимого судном расстояния, основанные на различных физических принципах, в соответствии с которыми современные лаги разделяются на гидродинамические, инерционные и вертушечные.
Вторая составная часть технических средств судовождения — радионавигационные (радиотехнические) средства — представляет собой совокупность радиоэлектронной аппаратуры, предназначенной для решения следующих навигационных задач:
- определение места судна в море; навигационное обеспечение безопасности плавания вблизи берегов, в узкостях и по фарватерам; обнаружение надводных опасностей; обеспечение расхождения судов в море и регулирование движения на портовых акваториях и др.
2.Навигационные параметры РТСС
Среди радиотехнических средств (РТС) также можно выделить три основные группы:
- азимутальные, позволяющие определять направление на источник излучения радиоволн (радиопеленгаторы, радиомаяки направленного действия);
- дальномерные и разностно-дальномерные, позволяющие определять место судна с высокой степенью точности на больших расстояниях («Лоран», «Декка», «Сайтак», «Шоран» и др.);
- азимутально-дальномерные (полярные), позволяющие измерять направление и расстояние до объекта, отражающего радиоволны (радиолокаторы различных систем и назначения).
3.Способы определения места
Радиопеленгование с судна
Радиопеленгатор представляет собой радиотехническое устройство, которое позволяет использовать свойства распространения радиоволн для определения направления их прихода.
По методу определения радиопеленга существующие судовые радиопеленгаторы подразделяют на два типа:
слуховые, в которых направление на радиомаяк определяется по минимуму слышимости радиосигнала;
визуальные, в которых направление определяется по расположению характерной развертки на электронно-лучевой трубке.
Для определения места судна с помощью судовых радиопеленгаторов в основном используются морские радиомаяки кругового излучения, расположение которых показано на морских навигационных картах. Для их работы выделен специальный диапазон частот 285 — 320 кГц (λ = 1050/920 м). Мощность радиоизлучения морских радиомаяков находится в пределах 50 — 250 Вт, а эффективная дальность использования днем до 175 миль. Передача радиосигналов радиомаяками осуществляется автоматически.
Для удобства использования они объединяются в навигационные группы по 2 — 6 маяков, которые работают на одной частоте по единому расписанию.
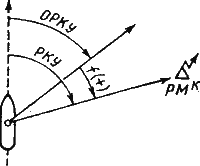
Рис. 1. К расчету РКУ
В слуховых радиопеленгаторах рамочная антенна подключена к специальному гониометрическому устройству, которое позволяет по минимуму слышимости радиосигнала определить направление на радиомаяк.
В визуальных радиопеленгаторах применен двухканальный радиоприемник, подключенный к двум взаимно перпендикулярным рамочным антеннам. В качестве индикатора направления используется электронно-лучевая трубка, на две пары отклоняющих пластин которой подаются сигналы от разных рамочных антенн. По характеру и расположению развертки определяется направление прихода радиоволны.
Слуховой и визуальный радиопеленгаторы позволяют определить направление на радиомаяк в виде отсчета радиокурсового угла (ОРКУ) по неподвижной шкале и в виде отсчета радиопеленга (ОРП) по шкале, соединенной с гирокомпасом.
Счет радиокурсовых углов ведется от диаметральной плоскости судна по направлению движения часовой стрелки в пределах 0 — 360°.
Таким образом, определение пеленга на радиомаяк судовым радиопеленгатором осуществляется по направлению прихода фронта радиоволны. Однако радиосигнал воздействует не только на рамочную антенну пеленгатора, но и на металлические конструкции корпуса судна, которые в результате этого становятся источниками «вторичного» излучения электромагнитной энергии.
Отклонение фронта электромагнитной волны от истинного направления под влиянием «вторичных» излучений металлических конструкций корпуса судна называется радиодевиацией.
Расположение всех вторичных излучателей на судне по отношению к рамочной антенне радиопеленгатора сохраняется неизменным, в то время как курсовые углы прихода радиоволны могут меняться в пределах 0 — 360°.
Следовательно, радиодевиация будет зависеть от радиокурсового угла на радиомаяк.
Уничтожение радиодевиации производится с помощью специального компенсирующего устройства — радиопеленгатора. Эта работа завершается определением остаточной радиодевиации, значение которой не должно превышать 4°.
В навигации под радиодевиацией принято понимать поправку /, которую необходимо ввести в снятый отсчет радиокурсового угла или радиопеленга, чтобы получить их неискаженное значение (рис. 1):
РКУ = ОРКУ+f;
РП = ОРП + f.
Определение радиодевиации основано на сравнении визуального курсового угла на радиомаяк с ОРКУ
f = КУ — ОРКУ.
К работе привлекается два наблюдателя: один на радиопеленгаторе снимает ОРКУ, второй — по компасу определяет визуальные курсовые углы на снижение антенны радиомаяка.
Перед выходом на уничтожение и определение радиодевиации необходимо, чтобы все подвижные металлические конструкции на верхней палубе были закреплены в положении «по-походному», а все активные круговые антенны изолированы. Район для маневрирования судна выбирается с расчетом, чтобы расстояние до пеленгуемой радиостанции было не менее 2 — 3 длин волн. Радиодевиация может быть определена несколькими способами.
По радиостанции плавучего маяка или судна, стоящего на якоре. Находясь в пределах визуальной видимости плавмаяка в стороне от него, судно описывает плавную циркуляцию на 360°. Через каждые 10 — 15° изменения курса одновременно по команде наблюдателя у радиопеленгатора снимаются ОРКУ и КУ.
По радиостанции вспомогательного судна. Способ применяется судами большого водоизмещения, маневрирование которых затруднено. Судно, определяющее радиодевиацию, становится на якорь, а вокруг него описывает плавную циркуляцию вспомогательное судно с работающим радиопередатчиком. В остальном методика работы остается такой же, как и в первом способе.
По береговой радиостанции. Маневрирование судна и порядок выполнения наблюдений полностью аналогичны способу определения радиодевиации по плавмаяку. Однако район маневрирования судна выбирают с учетом того, чтобы линия «радиостанция — судно» всегда пересекала береговую черту под углом, близким к 90°.
После завершения работы на миллиметровой бумаге строится график зависимости наблюдаемой радиодевиации от радиокурсовых углов. Для этого по оси абсцисс откладывают в масштабе ОРКУ от 0 до 360°, а по оси ординат — значения радиодевиации.
Полученные точки соединяют плавной кривой, а там, где наблюдается их незначительный разброс, производят осреднение радиодевиации. Далее, с полученной кривой снимают значения радиодевиации для ОРКУ, кратных 10°, и данные сводят в рабочую таблицу остаточной радиодевиации.
Основными причинами изменения радиодевиации являются: изменение осадки судна; наличие крена или дифферента; изменение в расположении или в количестве судовых антенн или металлических масс вблизи рамочной антенны радиопеленгатора; длительная стоянка судна в неизменном положении.
Кроме того, радиодевиация не будет соответствовать табличному значению, если частота пеленгуемого радиомаяка будет отличаться от частоты, для которой составлялась таблица f.
Остаточную радиодевиацию рекомендуется определять для осадки судна в грузу и в балласте для радиоволн: 1000 м — основная радиомаячная волна; 800 м — радиоволна, используемая для связи судов; 600 м — радиоволна для передачи сигналов бедствия.
Судоводитель обязан использовать каждую предоставившуюся возможность для проверки пригодности таблицы остаточной радиодевиации. Если расхождения между табличными и полученными в результате наблюдений значениями радиодевиации будут равны или более 1,5°, то необходимо повторное ее определение.
Определение места по радиопеленгам
Дальность действия радиомаяков кругового излучения обычно не превышает 200 миль. В пределах этого расстояния угол между ортодромией и изоазимутой меняется от значения, близкого к нулю, до максимального в данных условиях. При незначительном удалении судна от радиомаяка значение ψ настолько мало, что ортодромия, локсодромия и изоазимута практически сливаются в одну линию. В этих условиях ортодромическую поправку можно не учитывать. В случае использования радиомаяка на предельном удалении от судна пренебрежение учетом ортодромической поправки приводит к значительным ошибкам в определении места судна.
В связи с этим при прокладке линий положения на морских навигационных картах принято различать малые, средние и большие расстояния, критерием деления на которые служит величина ортодромической поправки.
Малые расстояния. К ним принято относить расстояния, при которых ортодромическая поправка равна или меньше 0,3°. В этих случаях учетом ее пренебрегают, так как точность графических построений на карте составляет 0,3°.
Для получения места судна рассчитывается истинный радиопеленг по формуле (109) или, если радиопеленгатор подключен к гирокомпасу, по формуле (110).
От места радиомаяка на карте прокладывается линия ИРП в виде прямой, которая будет являться линией положения судна. Расчеты показывают, что при самых неблагоприятных условиях пеленгования учетом ψ можно пренебречь в широтах Баренцева (южная часть), Белого и Балтийского морей — на расстоянии до 15 миль; в широтах Черного, Азовского и Каспийского морей — на расстоянии до 35 миль.
Средние расстояния. К ним относятся такие расстояния, на которых учет ψ по приближенной формуле (112) или табл. 23а МТ — 75 не вызывает ошибки в линии положения, превышающей ошибку графики (± 0,3°). Это соответствует значениям 0,3°
ИП = ОРКУ + ƒ +КК+ ΔК + ψ; (44)
ИП = ОРП + ƒ + ΔГК+ψ (45)
Средние расстояния охватывают дальности действия почти всех радиомаяков с круговым излучением.
Большие расстояния. Это такие расстояния, при которых ψ имеет значения, не допускающие замену изоазимуты линией локсодромического пеленга (ψ 3,0°).
Для определения места рассчитывают направления касательных к изоазимутам по формулам."
R=ОРКУ+ƒ+КК+ΔК + 2ψ; (116)
R = ОРП+ƒ+ΔГК+2ψ. (117)
Ортодромические поправки в этих случаях выбираются из табл. 236 МТ — 75 для больших расстояний.
Сложность получения места на карте состоит в том, что линии положения должны быть касательными к изоазимутам в точке нахождения судна, а она нам неизвестна. Поэтому выполняются дополнительные расчеты и построения, имеющие своей целью найти положения так называемых определяющих точек, через которые проводятся линии положения.
Известно несколько способов получения на карте определяющих точек. Наиболее простой и распространенный из них получил название способа нормали к пеленгу. Сущность его заключается в том, что от места радиомаяка на карте проводится обратное направление локсодромического пеленга, на линию которого из счислимого места судна С (рис. 2) опускается перпендикуляр. Основание перпендикуляра К будет являться определяющей точкой, через которую проводят по направлению касательной к изоазимуте отрезок линии положения аа'.
Порядок действия при определении места судна по трем радиопеленгам. 1. Используя карты, подбирают радиомаяки, желательно из одной навигационной группы. Предпочтение отдают радиомаякам, имеющим наибольшую мощность излучения или расположенным ближе к судну.
2. Выбирают из пособия «Радиотехнические средства навигационного оборудования» для соответствующего моря длину волны (частоту), род работы, позывные радиомаяков, расписание и порядок работы в группе.
3. Включают и настраивают радиопеленгатор на частоту радиомаяка, предварительно убедившись в том, что судовые антенны изолированы.
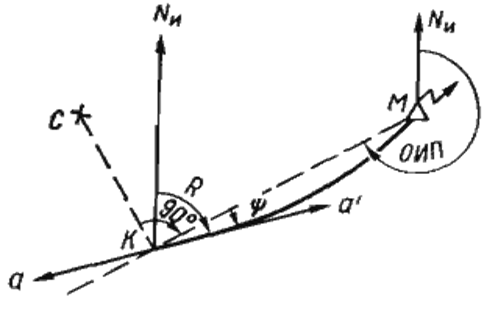
Рис. 2. Нанесение определяющей точки
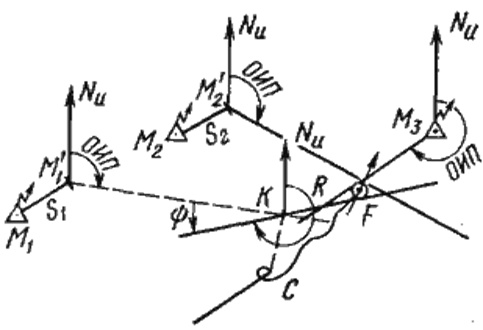
Рис. 3. Определение места по трем радиопеленгам
4. Опознав радиомаяк по позывному, определяют направление минимума слышимости в момент передачи сигнала «тире», снимают значения ОРП и ОРКУ, замечают время и отсчет лага. Если радиопеленгатор не подключен к гирокомпасу, то одновременно с ОРКУ фиксируют точное значение КК. Действия повторяют при пеленговании каждого радиомаяка.
5. Выбирают из таблицы радиодевиацию для каждого ОРКУ. В зависимости от расстояния до радиомаяков по табл. 23а или 23б МТ — 75 находят значения ортодромических поправок.
6. Рассчитывают линии положения, используя формулы (114) — (115)
7. Приводят линии положения к моменту последних наблюдений, для чего на карте смещают обозначения двух первых радиомаяков М1 и М2 (рис. 2) по направлению пути судна на отрезки плавания,
равные
S1 = (ол3 — ол1) КЛ или S1 = V(T3 — T1);
S2=(ол3 — ол2)Кл или S2=V (Т3 — Т2),
где T1, Т2,Т3 — моменты времени измерения радиопеленгов на первый. второй и третий радиомаяки, соответственно; ол1, ол2, ол3 — отсчеты лагов, соответствующие указанным моментам.
8. Проводят через полученные на карте точки М'1, М'2 и место радиомаяка М3 линии положения, соответствующие направлению ИРП (ψ ≤ 0,3°) или ИП (0,3
9. Получив на средних дистанциях радиопеленгования треугольник погрешности со стороной менее 1,5 — 2,0 мили (10 — 15 мм на путевых картах), принимают место судна внутри его ближе к малой стороне и углу, более близкому к прямому.
Если при определении места будет получен треугольник погрешности значительно больших размеров, то проверяют, нет ли промаха в расчетах, в прокладке на карте и в наблюдениях.
Фазовые РНС
Фазовые гиперболические системы обладают большой точностью определения места судна. В этих системах используются предложенные в 1930 — 1934 гг. советскими учеными Л. И. Мандельштамом, Н. Д. Папалекси и Е. Я. Щеголевым способы определения разности расстояний между судном и береговыми станциями по измерению разности фаз, принятых радиосигналов.
В настоящее время широко используется в практике морского судовождения фазовая разностно-дальномерная РНС «Декка». Цепочка этой системы состоит из трех ведомых станций, расположенных приблизительно в вершинах равностороннего треугольника, и ведущей станции, находящейся в его центре. Такое расположение обеспечивает создание рабочей зоны в пределах 360° вокруг ведущей станции.
Цепочка РНС «Декка» обеспечивает непрерывную работу в двух режимах: в режиме создания фазового поля для образования точной сетки гипербол и в режиме устранения многозначности фазовых отсчетов.
В первом режиме все станции излучают непрерывные незатухающие колебания, которые являются гармониками основной базисной частоты ƒ = 14,2 кГц.
Ведущая станция излучает частоту 6ƒ, а ведомые — 5ƒ, 8ƒ, 9ƒ с постоянно согласованной фазой относительно фазы ведущей станции.
Сетки гиперболических линий положения каждой пары станций на специальных навигационных картах показываются красным, зеленым и фиолетовым цветами. В соответствии с этим ведомые станции принято называть по цвету создаваемой сетки «красная», «зеленая» и «фиолетовая».
На судах устанавливаются четырехканальные приемоиндикаторы отечественного производства «Пирс-1», которые имеют три точных фа-зоизмерителя и один грубый, используемый для разрешения многозначности.
Разность фаз принятых сигналов может быть определена, если они будут иметь одинаковую частоту. Поэтому после усиления принятые частоты преобразуются в умножителях приемоиндикатора в частоты сравнения 24ƒ — для ведущей и красной станций, 19ƒ — для ведущей и зеленой и 30ƒ — для ведущей и фиолетовой.
При нахождении судна на нормали к базе1 разность расстояний до радиостанций данной пары, а следовательно, и разность фаз будут равны нулю.
По мере удаления от нормали разность фаз будет увеличиваться и после изменения на целый цикл, равный 2π, вновь будет равна нулю, a ΔD = λм. Объясняется это тем, что с помощью точных фазометров можно измерять только дробную часть разности фаз, а количество совершившихся целых циклов определить невозможно. Следовательно, система обладает многозначностью фазовых отсчетов, которая увеличивается с увеличением частоты сравнения.
Пространство земной поверхности, заключенное между гиперболами с разностями фаз, равными 2π, называется дорожкой. 1/100 точной
дорожки называется линией положения.
По счисленному месту судна опознать номер точной дорожки практически невозможно, так как ширина ее на базе находится в пределах 350 — 590 м. Поэтому при разрешении многозначности прибегают к увеличению ширины дорожек в несколько раз путем уменьшения частоты сравнения.
С этой целью береговые станции периодически переходят на режим создания грубых дорожек, в ходе которого в приемоиндикаторе отключаются точные фазометры и подключается грубый фазометр.
Образующиеся грубые дорожки называются зонами, обозначаются буквами латинского алфавита от А до J и имеют ширину на базе 10,5 км.
Такая ширина зоны позволяет распознать ее по счислимому месту судна.
В каждой зоне количество точных дорожек соответствует номеру гармоники частоты сравнения. Поэтому красная зона содержит 24, зеленая — 18, фиолетовая — 30 точных дорожек.
В приемоиндикэторе с помощью грубого фазометра происходит последовательное определение разности фаз всех трех пар станций на частоте сравнения ƒ и определяются номера точных дорожек. Отсчеты, соответствующие линиям положения внутри точных дорожек, получаются автоматически по точным фазометрам. После разрешения многозначности номера точных дорожек и наименования зон устанавливаются на точных фазометрах, которые в дальнейшем автоматически следят за их изменением.
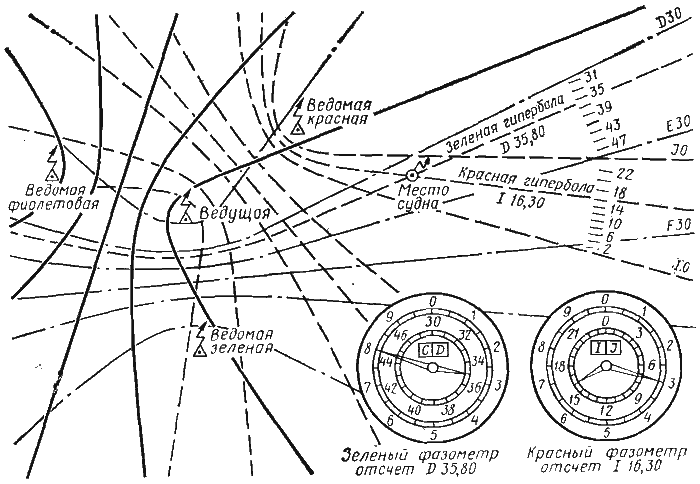
Рис. 3. Определение места по фазовой РНС
При пересечении судном точной дорожки маленькая стрелка точного фазометра переместится на одно деление, при пересечении грубой дорожки (зоны) маленькая стрелка сделает полный оборот по шкале и в вырезе циферблата фазометра изменится буквенное обозначение зоны.
Для предупреждения возможной путаницы с отсчетами оцифровка точных дорожек на карте выполнена от 0 до 23 для красной пары, от 30 до 47 для зеленой пары и от 50 до 79 для фиолетовой пары.
Шкалы точных фазометров приемоиндикатора имеют такую же оцифровку точных дорожек, как и на карте. Наличие второй большой стрелки позволяет снимать отсчеты с фазометров до 0,01 точной дорожки. Место судна определяется в пересечении 2 — 3 гипербол, которые соответствуют показаниям фазометров (рис. 107). Дальность действия РНС «Декка» составляет 250 — 300 миль, предельная точность определения места судна 1 — 4 кбт.
1 База — прямая, соединяющая ведущую и ведомую радиостанции.
Определение судна с помощью РЛС
Радиолокационные определения места судна представляют собой результат использования в различных комбинациях пеленгов и расстояний до опознанных ориентиров.
Способы определения места остаются те же, что и при визуальных наблюдениях, но РЛС в большинстве случаев расширяет возможности по измерению указанных навигационных параметров.
Измерение пеленга. Для определения направления на ориентиры используются электронные или механические визиры, которые совмещаются с отметками эхо-сигналов на экране РЛС. Если гирокомпас подключен к радиолокатору и изображение на экране стабилизировано по норду, то со шкалы снимается радиолокационный пеленг (РЛП). При стабилизации изображения по курсу со шкалы снимают радиолокационный курсовой угол (РЛКУ).
Расчеты ИП выполняются по соответствующим формулам:
ИП =РЛП+ΔГК; ИП = РЛКУ+КК+ΔК.
На точность радиолокационного пеленгования оказывают влияние ряд причин.
1. Ошибки визирования возникают при совмещении визирной линии с предполагаемой серединой отметки эхо-сигнала на экране РЛС. Основной причиной неточности совмещения является растягивание отметок эхо-сигналов по дуге пропорционально ширине диаграммы направленности (θ).
При различных отражающих способностях кромок объекта это растягивание бывает несимметричным. Ошибки визирования уменьшаются с удалением отметки от центра развертки. Так, средняя квадратичная ошибка визирования точечного объекта при удалении отметки на 1/3 радиуса экрана от центра развертки составляет ±0,6°, при удалении на 2/3 радиуса экрана — ±0,3°.
Особенно возрастают ошибки при пеленговании кромок протяженных объектов, облучаемых вдоль их водного уреза. В этом случае за счет ширины диаграммы направленности в горизонтальной плоскости эхо-сигнал на экране РЛС отмечается даже тогда, когда ее осевая линия не совмещена с кромкой объекта. Возникает угловая ошибка, учесть которую невозможно (рис. 4). По этой причине рекомендуется пеленговать только те мысы, которые вытянуты радиально по отношению к судну, т. е. облучаются «в упор».
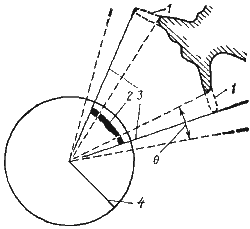
Рис. 4. Ошибка радиолокационного пеленгования:
1 — участки удлинения мысов; 2 - эхо-сигнал; 3 — осевые линии диаграммы θ, соответствующие на экране РЛС пеленгам на мысы; 4 — отметка курса
2. Ошибки эксцентриситета. Эти ошибки возникают в результате смещения центра развертки относительно центра вращения механического визира и могут достигать значительных величин. Например, при эксцентриситете в 1 мм ошибка в пеленге отметки, находящейся на удалении 1/2 радиуса экрана от центра развертки, составляет около ±0,7°.
Отсюда видно, насколько точно должна выполняться регулировка РЛС по совмещению центров вращения механического визира и развертки. В случае использования электронного визира ошибки эксцентриситета отсутствуют.
Точность радиолокационного пеленга, помимо перечисленных причин, зависит от ошибки в нуле отсчета (±0,3°), от инструментальной ошибки (±0,3'°), ошибки в поправке компаса.
Действие всех этих причин приводит к тому, что точность радиолокационного пеленга значительно ниже точности визуального. При использовании механического визира средняя квадратичная ошибка радиолокационного пеленга с учетом ошибки в ΔК составляет ±1,5°. Измерение расстояний. Почти во всех современных РЛС измерение расстояний выполняется с помощью дальномерного устройства, имеющего подвижное кольцо дальности (ПКД). В этом случае точность измерений зависит от инструментальной ошибки (±10 — 15 м), масштабной ошибки и ошибки совмещения ПКД с отметкой эхо-сигнала.
В радиолокационных станциях, где дальномерное устройство отсутствует, измерения расстояний производятся путем глазомерной интерполяции положения отметки эхо-сигнала между неподвижными кольцами дальности (НКД). Точность измерений этим способом ниже и зависит от ошибок положения колец дальности, нелинейности хода развертки и величины интервала между НКД.
Суммарная средняя квадратичная ошибка измерения расстояния помощью ПКД до точечного ориентира составляет ±0,6 — 1,0 %, до береговой линии — 0,6 — 3,0 % от измеренного расстояния.
При определении места судна необходимо выполнять следующие практические рекомендации, учитывающие особенности РЛС.
1. Регулировки усиления и яркости не должны вызывать чрезмерного свечения отметок на экране, а само изображение должно иметь хорошую фокусировку.
2. Пеленговать только точечные или малоразмерные объекты, выдающиеся в море мысы пеленговать только «в упор».
3. Пеленгование выполнять на шкалах самого крупного масштаба и таких объектов, отметки которых удалены от центра развертки на расстояние более 1/3 радиуса экрана.
4. Выбирать объекты для измерения расстояний с наиболее четкими краями отметок эхо-сигналов.
5. Измерять расстояния, используя тот способ совмещения ПКД с отметкой эхо-сигнала, который использовался при калибровке РЛС.
Определение места по измеренным расстояниям до опознанных ориентиров. Для применения этого способа необходимо иметь в видимости РЛС не менее двух точечных ориентиров или ориентиров малой протяженности. Последовательность измерения расстояний, приведение их к одному моменту и прокладка места на карте аналогичны изложенному в § 34. Для оценки точности определения места по двум или трем расстояниям используются формулы (104) и (95) соответственно.
Определение места по измерению расстояний до точечного объекта и плавной береговой черты. Для определения места судна (рис. 103) измеряют в быстрой последовательности кратчайшее расстояние до береговой черты D1 и расстояние до точечного ориентира D2. Одновременно замечают время и отсчет лага. На карте из точечного ориентира М как из центра проводят дугу окружности аа радиусом, равным D2. Далее, находят на дуге аа такую точку F, из которой дуга окружности bb, описанная радиусом D1, будет касательной к береговой черте. Полученная точка F будет являться местом судна.
Определение места по кратчайшим расстояниям до береговой черты с плавными очертаниями. Способ применяется в том случае, когда на экране РЛС по различным направлениям видны ртметки опознанной береговой черты, не имеющей приметных ориентиров. С помощью ПКД (рис. 104) измеряют в быстрой последовательности кратчайшие расстояния до береговой черты D1 и D2, замечают время и показание лага. На листе кальки от произвольной точки О прокладывают линию курса судна и проводят дуги радиусами Dг и D2 в масштабе карты. На-
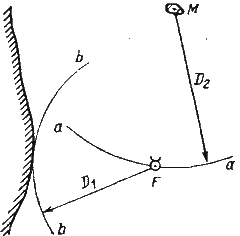
Рис. 5. Определение места по двум радиолокационным расстояниям
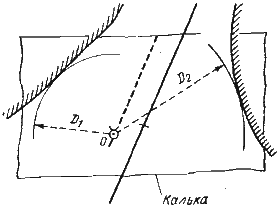
Рис. 6. Определение места по берегам с плавными очертаниями
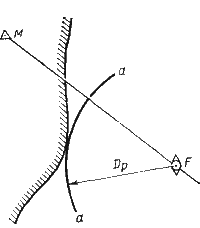
Рис. 7. Определение места по визуальному пеленгу и DP
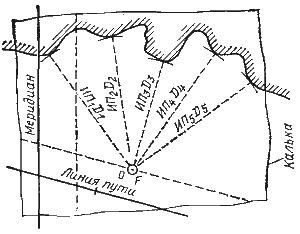
Рис. 8. Опознание места по вееру пеленгов и расстояний
ложив кальку на карту в районе счислимого места, находят такое ее положение, при котором линии курсов на кальке и карте параллельны, а дуги радиусов D1 и D2 касаются соответствующих участков береговой черты. Накол циркулем в точке О даст положение места судна на карте.
Определение места по пеленгу и расстоянию. Если в пределах радиолокационной видимости находится опознанный точечный ориентир или ориентир малой протяженности, то для определения места судна измеряют радиолокационный пеленг и расстояние до него. Место судна на карте получается путем построений.
Иногда бывает невозможно получить радиолокационный пеленг, так как ориентир не распознается на экране РЛС. В этом случае измеряют кратчайшее расстояние до плавной береговой черты D и берут визуально пеленг на ориентир М (5). На карте проводят линию ИП от ориентира М и с помощью циркуля находят на ней такую точку F, из которой дуга аа радиусом, равным Dp в масштабе карты, была бы касательной к береговой черте. Точка F является обсервованным местом судна.
Применяя этот способ определения, часто радиолокационный пеленг заменяют визуальным, что значительно повышает точность обсервации.
Опознание места судна по вееру пеленгов и расстояний. Способ может быть применен при плавании в районе с обрывистым берегом, имеющим характерные изгибы. Желательно, чтобы на карте был показан рельеф прилегающей суши и проведены горизонтали.
Для опознания места с помощью РЛС в быстрой последовательности берут серию пеленгов и расстояний до четких характерных отметок эхо-сигналов на экране. В основном это будут расстояния, измеренные до береговой черты, а иногда, в низменных участках, до характерных складок местности. При скорости судна менее 12 уз время и отсчет лага замечают в момент средних наблюдений.
Далее, на листе кальки проводят линии истинного меридиана и пути судна. Выбрав на линии пути произвольную точку F, прокладывают из нее измеренные истинные пеленги и откладывают по ним в масштабе карты измеренные расстояния (рис. 6). Кальку накладывают на карту в районе счислимого места и добиваются совпадения большинства конечных точек пеленгов с характерными изгибами береговой черты или деталями рельефа берега. При этом необходимо следить, чтобы линии меридианов и пути судна на кальке и карте оставались параллельными друг другу. Накол циркулем через кальку в точке F дает место судна на момент средних наблюдений.
Если скорость судна более 12 уз, то время и лаг замечают при каждом измерении пеленга и расстояния. В этом случае на кальке первые измерения откладывают от произвольной точки пути судна, а остальные — от точек, рассчитанных по счислению в масштабе карты. Далее поступают так же, как и в первом случае. Накол циркулем через кальку в последней точке на линии пути судна дает его опознанное место на момент последних наблюдений.
Чем больше будет выполнено наблюдений, тем точнее будет опознано место судна. Однако, чтобы исключить возможность случайного совпадения конечных точек пеленгов, необходимо опознание повторить несколько раз, сопоставляя его результаты с данными счисления.
Спутниковая РНС “Навстар “
Данная РНС предназначена для определения места положения
различных подвижных объектов в любой точке Земли или околоземного
пространства в любое время суток независимо от погодных условий. Система
“Навстар” после её полного развёртывания должна состоять из 18 (24) ИСЗ на шести орбитах по три равномерно расположенных ИСЗ на каждой. Орбиты почти круговые с высотой H = 20240 км. Угол наклона
i=55o . При этом плоскости орбит пересекаются под прямым углом, образуя на поверхности Земли восемь равных октантов. Это обеспечивает единообразную зону точности на всей поверхности Земли. Период обращения ИСЗ 12 ч. Радиус зоны радио видимости 76o.
В ней могут наблюдаться одновременно от четырёх до семи ИСЗ. Определение места будет производиться пассивным дальномерным методом до четырёх ИСЗ, наиболее удобно расположенных. К ним относятся три ИСЗ, имеющих малые высотыи разность азимутов около 120o, и один ИСЗ — в зените наблюдателя.
На спутниках применяют цезиевые стандарты частоты с нестабильностью 10-13за сутки.
Приём информации производится на двух частотах 1227,60 и 1575,42
МГц с применением псевдошумовой модуляции. Мощность излучения 450 Вт.
Измеряемые радионавигационные параметры: задержка и доплеровское
смещение частоты принимаемого сигнала относительно его модели, формируемой в судовой навигационной аппаратуре. Задержка позволяет определить расстояние, доплеровское, смещение — радиальную скорость. Каждый ИСЗ излучает сложный сигнал на двух частотах, состоящих из точного навигационного сигнала типаР (precise code) и грубого
навигационного сигнала типа С / А (coarse/ acguisition — грубо/наведение).
Сигнал защищён от несанкционированного использования и позволяет производить высокочастотные навигационные измерения, С/А открыт для всех потребителей ипозволяет производить навигационные измерения пониженной точности.
Контрольные вопросы:
1. Радиотехнические средства судовождения предназначенные для определения места судна?
2. Наиболее точные технические средства судовождения?
3. Перечислить навигационные параметры РТСС?
Просмотр содержимого документа
«Лекция Т.1.11.»
Тема 1.11. Ошибки измерений навигационных параметров и стандарты точности судовождения.
План лекции № 16
1.Классификация ошибок измерений.
2.Общая формула для расчета СКП измерений.
3.Международные стандарты точности судовождения.
Цель занятия:
Знать:
- методы и способы определения места судна визуальными способами с оценкой их точности;
Уметь:
- рассчитывать среднюю квадратическую погрешность (СКП) счислимого и обсервованного места, строить на карте площадь вероятного места нахождения судна.
1.Классификация ошибок измерений
Вследствие неточности измерительных приборов и трудности учета всех побочных явлений при измерениях неизбежно возникают погрешности измерений. Погрешностью или ошибкой измерения называют отклонение результата измерения от истинного значения измеряемой физической величины. Погрешность измерения обычно неизвестна, как неизвестно и истинное значение измеряемой величины. Поэтому задача элементарной обработки результатов измерений заключается в установлении интервала, внутри которого с заданной вероятностью находится истинное значение измеряемой физической величины.
Погрешности разделяют на три вида:
- грубые или промахи,
- систематические,
- случайные.
Грубые погрешности - это ошибочные измерения, возникающие в результате небрежности отсчета по прибору, неразборчивости записи показаний. Например, запись результата 26,5 вместо 2,65; отсчет по шкале 18 вместо 13 и т.д. При обнаружении грубой ошибки результат данного измерения следует сразу отбросить, а само измерение повторить.
Систематические погрешности - ошибки, которые при повторных измерениях остаются постоянными или изменяются по определенному закону. Эти погрешности могут быть обусловлены неправильным выбором метода измерения, несовершенством или неисправностью приборов (например, измерения с помощью прибора, у которого смещен нуль). Для того, чтобы максимально исключить систематические погрешности, следует всегда тщательно анализировать метод измерений, сверять приборы с эталонами. В дальнейшем будем считать, что все систематические погрешности устранены, кроме тех, которые вызваны неточностью изготовления приборов и ошибкой отсчета. Эту погрешность будем называть аппаратурной.
Случайные погрешности - это ошибки, причина которых заранее не может быть учтена. Случайные погрешности зависят от несовершенства наших органов чувств, от непрерывного действия изменяющихся внешних условий (изменение температуры, давления, влажности, вибрация воздуха и т.д.). Случайные погрешности являются неустранимыми, они неизбежно присутствуют во всех измерениях, но их можно оценить, применяя методы теории вероятностей.
2.Общая формула для расчета СКП измерений
Решение основных задач кораблевождения связано с измерением различных исходных навигационных величин, к которым относятся навигационные параметры (пеленги, расстояния, высоты светил и т. д.) и элементы счисления (компасный курс, скорость, их поправки, направление и скорость течения, углы дрейфа).
Каждая навигационная величина содержит погрешность, полное значение которой складывается из погрешности измерения и погрешности обработки измеренных величин (погрешности поправок).
Основными причинами погрешностей являются следующие:
– несовершенство измерительного прибора;
– незакономерные и неучитываемые колебания параметров внешней среды, влияющие на результат измерения;
– нестабильность характеристик объекта измерения;
– несовершенство метода измерения;
– несовершенство практических навыков и органов чувств оператора, производящего измерения.
Погрешность навигационной величины равна разности величины U, полученной в результате ее измерения, и истинного ее значения U0.
D = U – U0. (1.2.1)
Погрешность, отнесенную к ее измеренному значению, называют относительной d:
![]() (1.2.2)
(1.2.2)
За истинное (действительное) значение навигационной величины принимается ее эталонное значение. За эталонное значение принимается такое, точность которого в три или более раза выше точности той величины, погрешность которой определяется.
В зависимости от природы факторов, формирующих погрешность, и от длительности их воздействия, погрешности разделяются на три вида: случайные, систематические и грубые (промахи).
Случайные погрешности – это погрешности, величина и знак которых изменяются случайным образом от измерения к измерению. Они формируются случайными факторами и поэтому спрогнозировать их точное значение невозможно. Случайные погрешности могут быть оценены лишь в вероятностном смысле, то есть можно только определить вероятность, с которой численное значение погрешности находится в тех или иных заданных пределах. Для этого надо знать закон распределения случайных погрешностей.
Случайные погрешности большинства измеряемых навигационных величин формируются под воздействием большого количества различных одинаково значащих случайных факторов и поэтому (на основании центральной предельной теоремы теории вероятностей) подчиняются нормальному закону распределения. Основным параметром этого закона является средняя квадратическая погрешность.
Средняя квадратическая погрешность (СКП) – это показатель точности навигационной величины. Она численно равна корню квадратному из дисперсии (дисперсия – термин теории вероятностей, характеризующий степень рассеивания случайных величин). Точное значение СКП обозначается греческой буквой «сигма» (s), а ее статистическая оценка, определяемая практическим способом и являющаяся приближенным значением СКП, обозначается символом m.
СКП вычисляется по результатам серии n измерений одной и той же навигационной величины. Для этого используется любая из следующих двух формул [9, 12]:
– формула о т к л о н е н и й результатов измерений U от их среднего арифметического значения ![]() :
:
![]() , (1.2.3)
, (1.2.3)
где i – порядковый номер измерения, при этом i = 1, 2, …, n (n ³ 9);
– формула р а з м а х а:
![]() (1.2.4)
(1.2.4)
где Umax – максимальный результат измерений; Umin – минимальный результат измерений; R – размах измерений, равный Umax – Umin; Kx – коэффициент, определяемый по числу измерений n с помощью табл. 4.5 НМТ.
Зная математическое выражение нормального закона распределения и СКП, можно определить вероятность появления случайной погрешности в любых заданных пределах. Для этого используется таблица интеграла вероятностей (функции Лапласа) для нормального закона распределения. Такая таблица помещена в сборник Мореходных таблиц (табл. 1-б МТ-75 или табл. 4.7 НМТ), а также в приложение 1 данного учебника.
Аргументом для входа в таблицу является нормированная погрешность z – заданная погрешность Dз, выраженная в величинах средней квадратической погрешности:
z = Dз / m.
Пользуясь таблицей функции Лапласа, можно найти вероятность н е в ы х о д а действительной погрешности за любые пределы, в том числе и за пределы + m, + 2m и + 3m. Они соответственно равны: Pm = 0,683, Р2m = 0,954 и P3m = 0,997. Отсюда видно, что практически все случайные погрешности (в среднем 997 из 1000) заключены в пределах от 0 до ± 3m. Поэтому погрешность D = 3m или D = 3s называется предельной. Вероятность появления случайной погрешности, превышающей предельную, ничтожно мала и составляет всего 0,003.
Навигационные величины, точность которых характеризуется различными СКП, называют неравноточными.
Признаками неравноточности является соблюдение хотя бы одного (любого) из следующих условий:
- измерения выполнены операторами различной квалификации, измерения выполнялись различными приборами (системами);
- измерения выполнялись в различных условиях, по разному влияющих на точность оцениваемой величины.
Для оценки относительной точности неравноточных величин иногда используется понятие в е с а навигационной величины, который вычисляется по формуле
p = 1 / m2. (1.2.5)
При рассмотрении совокупности навигационных величин в их полных средних квадратических погрешностях mп следует выделять две составляющие – ч а с т н у ю СКП mi каждой i-й навигационной величины и п о в т о р я ю щ у ю с я СКП mо – общую для всех навигационных величин погрешность, то есть
![]() (1.2.6)
(1.2.6)
Ч а с т н ы е СКП – это средние квадратические погрешности, обусловленные неточностью измерения i-й навигационной величины и неточностью частных поправок (частные поправки – это поправки, численное значение каждой из которых свойственно данной i-йнавигационной величине).
П о в т о р я ю щ а я с я СКП – это оценка случайной по происхождению погрешности, которая в неизменном виде (систематически) присутствует в каждой навигационной величине рассматриваемой группы.
При непосредственных измерениях источником повторяющейся погрешности является случайная погрешность общей поправки, которой исправлялись все навигационные величины рассматриваемой группы. Эта случайная погрешность вместе с общей поправкой в неизменном виде входит во все навигационные величины (повторяется) и по своему воздействию на них проявляется как систематическая. Поэтому повторяющуюся погрешность следует рассматривать как случайную погрешность по происхождению, но систематическую (постоянную) по результатам воздействия на данную группу навигационных величин [22, 12].
Повторяющаяся погрешность является причиной корреляционной взаимосвязи навигационных величин. В отличие от функциональной взаимосвязи, корреляционная взаимосвязь проявляется случайным образом и ее закономерность обнаруживается в массе совместных измерений, то есть в среднем.
От степени корреляционной взаимосвязи зависит правило расчета погрешности определяемого места корабля и способ определения вероятнейшего места при появлении фигуры погрешностей (при определении места по трем или более навигационным параметрам).
Степень взаимной корреляции навигационных величин характеризуется коэффициентом взаимной корреляции r, численное значение которого при непосредственных равноточных измерениях (частные СКП mi = m – const) вычисляется по формуле
![]()
![]()
![]()
![]() (1.2.7)
(1.2.7)
Из этой формулы следует, что при отсутствии повторяющейся погрешности (mо = 0), то есть при точно известной общей поправки, коэффициент корреляции равен нулю и, следовательно, навигационные величины взаимонезависимы.
Если при наличии повторяющейся погрешности отсутствуют частные погрешности (измерения выполнены практически безошибочно, а частные поправки отсутствуют или точно известны), то коэффициент корреляции равен единице. Навигационные величины в этом случае становятся функционально зависимыми.
При наличии и частных, и повторяющейся погрешностей коэффициент корреляции 0
Обобщенные средние статистические значения частных, повторяющихся и полных средних квадратических погрешностей, а также коэффициентов взаимной корреляции основных навигационных параметров, приведены в табл. 4.3 HМТ и в приложении 2.
Систематические погрешности – это погрешности, остающиеся постоянными или закономерно изменяющимися при производстве серии измерений одной и той же навигационной величины.
Причиной систематических погрешностей является воздействие на результаты всех измерений одного и того же неизменного неслучайного фактора.
Основными источниками систематических погрешностей являются рассогласование нуля шкалы навигационной системы относительно его истинного положения (неточность выверки шкалы прибора по эталону) и несовершенство метода измерения, когда вместо искомой величины измеряется ее часть (с недостатком или с избытком). Например, измеренная секстаном высота светила относительно видимого горизонта содержит систематическую погрешность, равную наклонению видимого горизонта.
Систематические погрешности Dс, как величины неизменные в данных условиях, определяются с помощью эталонных измерений Uэ и учитываются в виде поправки DU.
Поправка — это систематическая погрешность, взятая с обратным знаком:
DU = – Dс = Uо – U » Uэ – U. (1.2.8)
Средняя квадратическая погрешность поправки mDU на основании теоремы о сумме дисперсий вычисляется по формуле
![]() (1.2.9)
(1.2.9)
где mэ – СКП эталонной величины (определяется по формуляру той системы, с помощью которой оценивается эталонное значение); mU – СКП навигационной величины, измеренной в момент определения поправки.
Если поправка общая для всех измерений данной группы (DU =DUо), то ее средняя квадратическая погрешность является повторяющейся, то есть mDU = mо; если по формуле (1.2.8) определена частная поправка, то есть ее численное значение свойственно только отдельной i-й навигационной величине, то ее средняя квадратическая погрешность является также частной (mDU = mi).
Грубые погрешности (промахи) – это ошибки, вызванные нарушением условий измерения или правил обработки. Наиболее вероятной причиной грубых погрешностей являются невнимательность оператора при измерении или обработке навигационных величин, а также незнание правил измерения (обработки) или отсутствие практических навыков в измерении и обработке.
Грубые погрешности заранее учесть невозможно, но их можно предупредить путем выполнения контрольных измерений и применения дублирующих методов обработки.
Наиболее простым, но приближенным способом выявления грубых ошибок, является способ, основанный на правиле “трех СКП”: если разница данного результата измерения и среднего арифметического значения, вычисленного по результатам всех измерений, больше трех СКП, то данный результат измерения содержит грубую ошибку. Такой результат исключается и в дальнейшей обработке не используется.
На практике различают предельные и относительные погрешности. Теорией доказывается, а практикой подтверждается, что абсолютное большинство случайных погрешностей находится в интервале от 0 до m - 68% , от 0 до 2m - 95% , от 0 до 3m - 99.7%.
На практике за предельную погрешность принимают 2m, т.е. с вероятностью 95% можно утверждать, что случайные погрешности не превысят величины равной 2m. Если n
3.Международные стандарты точности судовождения
РЕЗОЛЮЦИЯ А.529(13)
Принята 17 ноября 1983 года
Повестка дня, пункт 10b
СТАНДАРТЫ ТОЧНОСТИ СУДОВОЖДЕНИЯ
АССАМБЛЕЯ,
ССЫЛАЯСЬ на статьи 16j Конвенции о Международной морской организации, касающуюся функций Ассамблеи в отношении правил, касающихся безопасности на море,
ПРИЗНАВАЯ необходимость предусмотреть руководство для Администраций по стандартам точности судовождения, которые должны применяться при оценке систем для определения места судна,
РАССМОТРЕВ рекомендации, сделанную Комитетом по безопасности на море на его сорок восьмой сессии,
1. ПРИНИМАЕТ стандарты точности судовождения, изложенные в Приложении к настоящей резолюции
2. РЕКОМЕНДУЕТ правительствам-членам применять эти стандарты точности в качестве руководства при оценке работы системы для определения места судна.
ПРИЛОЖЕНИЕ
СТАНДАРТЫ ТОЧНОСТИ СУДОВОЖДЕНИЯ
1 Введение
1.1 Целью настоящего документа является обеспечение руководства для Администраций по стандартам точности судовождения, которые должны применяться при оценке систем для определения места судна, в частности, радионавигационных систем, включая спутниковые системы. Эти стандарты не применяются к специализированным видам деятельности, таким как разведка ресурсов морского дна или деятельность гидрографических служб.
1.2 Судоводителю необходимо знать свое место на любой момент времени. Для этого необходимы точные обсервации, а если получение таких обсерваций не может производиться непрерывно, то должен иметься метод оценки места судна между обсервациями, в качестве которого может использоваться счисление.
2 Факторы, влияющие на требования к точности 2.1 Требования к точности зависят от различных факторов, включая:
.1 скорость судна; и .
.2 расстояние до ближайшей навигационной опасности. Навигационной опасностью считается всякий признанный или нанесенный на карту элемент, либо граница, которые могут представлять или очерчивать опасность для судна, либо ограничивать район плавания.
3 Стадии рейса 3.1 Рейс судна может быть поделен на следующие стадии:
.1 вход в гавань и подходы к ней, а также воды, в которых ограничена свобода маневра; и
.2 другие воды.
3.2 На первой стадии судовождение осуществляется, как правило, путем визуальных наблюдений, с помощью радиолокатора, эхолота и т.д., либо с помощью специальных радионавигационных систем. Требования к точности судовождения зависят от местных обстоятельств. Деление на эти две стадии не является точным и зависит от местных обстоятельств.
4 Определение стандартов точности судовождения
4.1 В нижеследующей таблице приводятся стандарты точности судовождения, по которым может производиться оценка сметем для определения места судна, следующего со скоростью не более 30 узлов.
ТАБЛИЦА 1
| Стадия рейса | Порядок точности судовождения |
| Вход в гавань и т.д. Другие воды | В зависимости от местных обстоятельств 4i расстояния от опасности с максимумом в 4 морские мили |
4.2 точность судовождения, которую может ожидать судоводитель при использовании какой-либо системы*, зависит как от точности места полученного с помощью этой системы; называемого "обсервацией по системе", так и от промежутка времени. Прошедшего с момента последней обсервации по системе.* Термин "система" означает любое средство, используемое для определения места судна.
4.3 Поскольку точность обсервация по Системе Зависит от систематических и случайных ошибок, она может быть охарактеризована лишь с определенной степенью вероятности. Для характеристики точности обсервации по системе должна использоваться 95%-ная вероятность.
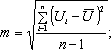
4.4 Если предположить, что для ведения счисления используются гирокомпас, отвечающий требованиям резолюции А.424 (XI), и устройство для указания скорости и пройденного расстояния, отвечающее требованиям резолюции А.4781Х11), без коррекции на основе предыдущих обсерваций по системе, то имеется зависимость между точностью судовождения, ожидаемой оператором, точностью обсерваций по системе и максимальным промежутком времени между обсервациями по системе. такая зависимость, учитывающая ошибки, обычно ожидаемые при предвычислении скорости приливио-отливных и Других течений и дрейфа, дается в таблице 2, а также на рисунках 1 и 2, на которых в различном виде приведены те же данные.
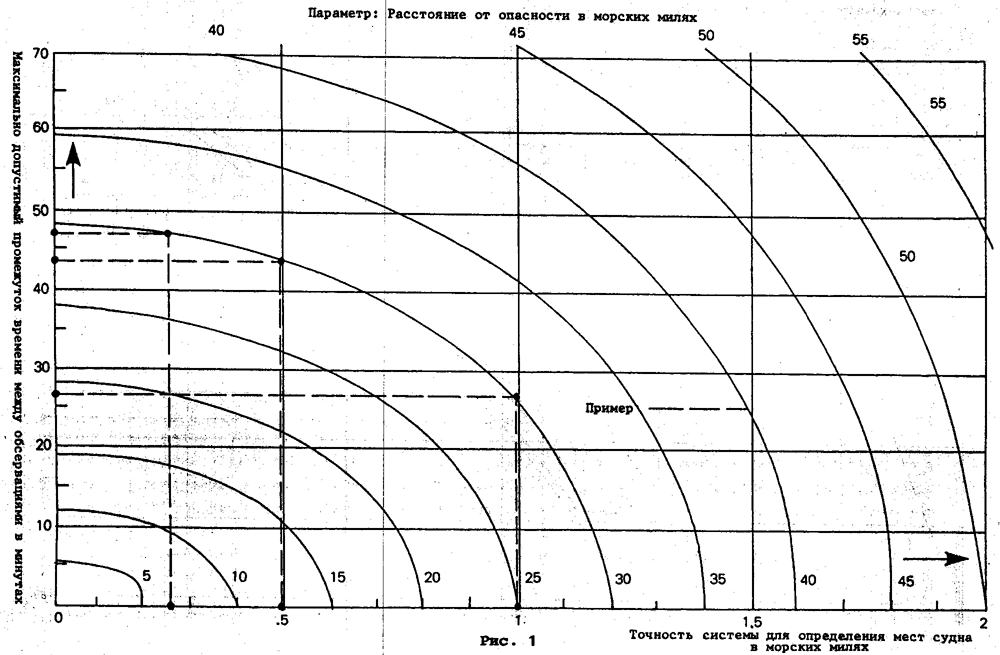
ТАБЛИЦА 2
| Минимальное расстояние от опасности (морские мили) | Требуемая точность судовождения (морские мили) | Точность системы для определения места судна (морские мили) | |||||
| 0 | 0,1 | 0,25 | 0,5 | 1 | 2 | ||
| Максимально допустимый промежуток времени между обсервациями (мин) | |||||||
| 10 | 0,4 | 12 | 12 | 9 | - | - | - |
| 20 | 0,8 | 28 | 28 | 27 | 22 | - | - |
| 30 | 1,2 | 48 | 48 | 47 | 44 | 27 | - |
| 40 | 1,6 | 72 | 72 | 71 | 68 | 56 | - |
| 50 | 2,0 | 100 | 100 | 99 | 97 | 87 | 0 |
| 60 | 2,4 | 132 | 132 | 131 | 129 | 120 | 73 |
| 70 | 2,8 | 168 | 168 | 167 | 165 | 157 | 118 |
| 80 | 3,2 | 208 | 208 | 207 | 206 | 198 | 162 |
| 90 | 3,6 | 252 | 252 | 251 | 250 | 242 | 210 |
| 100 | 4,0 | 300 | 300 | 300 | 298 | 291 | 260 |
Пример использования таблицы:
С целью соблюдения навигационных требований на судах, которые, как предполагается, не будут приближаться к опасности на расстояние менее 30 морских миль, требуемая точность судовождения должна равняться 1,2 морской мили и может быть достигнута с помощью системы, обеспечивающей точность, равную:
1 морской миле при промежутке времени между обсервациями не более 27 мин;
0,5 морской мили при промежутке времени между обсервациями не более 44 мин;
0,25 морской мили при промежутке времени между обсервациями не более 47 мин; или
0,1 морской мили при промежутке времени между обсервациями не более 48 мин.
Контрольные вопросы:
1. Виды погрешностей?
2. Формула СКП?
3. Минимальное расстояние от опасности в море?
Практические занятия на тренажере NS – 2006
1.Задачи, решаемые на МНК. (4 часа)
2.Вводная навигационная прокладка. (4 часа)
3.Навигационная прокладка без учета сноса. (4 часа)
4.Навигационная прокладка с учетом дрейфа. (4 часа)
5.Навигационная прокладка с учетом течения. (4 часа)
Просмотр содержимого документа
«Лекция Т.1.2.»
Тема 1.2. Определение направлений в море.
План лекции № 2-3
1. Системы счета направлений. Истинные направления.
2. Приборы для выработки и измерения направлений в море.
3. Магнитное поле Земли. Магнитные направления.
4. Магнитные компасы.
5. Магнитное поле судна. Девиация магнитного компаса. Компасные направления по МК.
6. Компасные направления по ГК.
7. Истинный курс, истинный пеленг, курсовой угол.
8. Определение поправок курсоуказателей.
Цель занятия:
Знать:
- определение направлений на картах;
- земной магнетизм и его влияние на магнитные компасы;
- приборы для выработки и измерения направлений в море.
Уметь:
- решать задачи на перевод и исправление курсов и пеленгов;
- определять поправки магнитного компаса;
- приводить магнитное склонение к году плавания;
Системы счета направлений. Истинные направления.
Основным условием безопасности плавания корабля является безошибочное определение направления движения судна относительно заданной линии пути и направлений на навигационные опасности.
Основой для определения направлений движения судна и на окружающие судно объекты являются главные направления: N, S, Е,W. Любое из этих главных направлений может быть принято за начало счета направлений.
В судовождении традиционно за начало счета направлений принимают или северную или южную часть линии истинного меридиана (полуденной линии). Определение направлений относительно полуденной линии производится по различным системам счета в зависимости от характера решаемых навигационных задач с точностью до 0,1′.
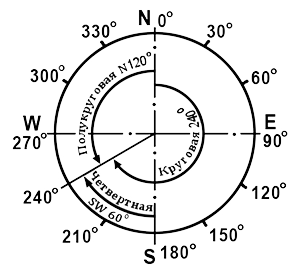
Для определения направления в плоскости истинного горизонта используются три системы деления горизонта: круговая, полукруговая и четвертная.
Круговая система счета направлений
В круговой системе за начало счета направлений принята северная (нордовая) часть линии истинного меридиана. В этой системе вся плоскость истинного горизонта разделена на 360°. Счет направлений ведется от северной части истинного меридиана по часовой стрелке от 0° до 360°. Отрицательных значений система не предусматривает.
Форма записи: 37,4°.
В навигации круговая система счета направлений является основной и применяется для определения направления движения судна, а также направлений на видимые с судна предметы.
В соответствии с этой системой на суднах разбиты шкалы всех курсоуказателей и приборов, служащих для определения направлений в море.
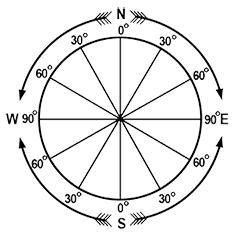
Полукруговая система счета направлений
В полукруговой системе плоскость истинного горизонта линией NS разделена на две части по 180° каждая. За начало счета направлений (0°) принимают как северную (N) часть, так и южную (S) часть линии истинного меридиана. Во всех случаях счет ведут к осту (Е) или весту (W) от 0° до 180°.
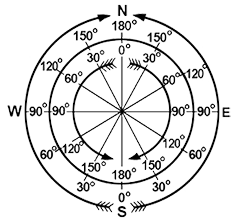
Четвертная система счета направлений
В четвертной системе плоскость истинного горизонта линиями NS и EW делится на четыре четверти: NE, SE, SW и NW.
За начало счета направлений (0°) принимают северную (N) или южную (S) часть истинного меридиана. Счет ведут от N или S в сторону Е или W от 0° до 90° в каждой четверти:
– в NE четверти от N к Е (по часовой стрелке) от 0° до 90°;
– в SE четверти от S к Е (против часовой стрелки) от 0° до 90°;
– в SW четверти от S к W (по часовой стрелке) от 0° до 90°;
– в NW четверти от N к W (против часовой стрелки) от 0° до 90°.
Для исключения многозначности при записи четвертных направлений указывают наименование четверти, в которой это направление расположено.
Например: NE70,1°; SW38,3°; NW76,9°; SE70,0°.
Приборы для выработки и измерения направлений в море.
Магнитный компас предназначен для определения направлений. По компасу назначается и удерживается курс судна, берутся пеленги на маяки и другие предметы, определяются курсовые углы, направление ветра и течения. Компас используется при плавании в море, крупных озерах и водохранилищах. Без компаса невозможно удерживать правильное направление движения судна во время плохой видимости (туман, снегопад и т.п.) и при потере видимости береговых ориентиров.
Любой магнитный компас действует на свойстве намагниченной стрелки, которая располагается осью в плоскости магнитного меридиана, причем один конец стрелки (нордовый) всегда обращен в сторону северного полюса.
Компас состоит из: котелка с картушкой; нактоуза (подставки под котелок); пеленгатора; средств для уничтожения девиации.
Гироскопический компас (гирокомпас) - компас, указывающий направления в море и работающий независимо от сил земного магнетизма и магнитного поля на судне.
Принцип действия гирокомпаса основан на использовании следующих свойств быстро вращающегося тела гироскопа:
1) ось быстро вращающегося ротора гироскопа сохраняет неизменным заданное в начальный момент направление;
2) под действием внешней силы, приложенной к гироскопу (подвешивается груз), главная ось поворачивается перпендикулярно к направлению действия силы, что и используется для превращения гироскопа в гирокомпас.
На работу гирокомпаса оказывают влияние скорость судна, маневрирование, качка, широта места и т.д. Часть этих погрешностей устраняется при помощи специальных устройств, часть учитывается поправкой гирокомпаса (ЛГК).
Работа (показания) гирокомпаса постоянно (особенно при каждом изменении курса) контролируется путем сличения курсов с магнитным компасом. В комплект гирокомпаса входят: основной компас; приборы управления, контроля и питания; приборы курсоуказания .
Гирокомпас имеет ряд преимуществ перед магнитным компасом: большая устойчивость на меридиане; отсутствие влияния на компас магнитного склонения ( d) и судовой девиации (8); возможность использовать в различных помещениях судна Дублирующих показания компаса приборов - репитеров; возможность вести непрерывную автоматическую запись курса судна во время плавания с помощью курсографа и использовать специальный прибор - авторулевой, который обеспечивает автоматическое управление рулевым приводом, удерживая судно на заданном курсе без участия рулевого.
Недостатки: сложность конструкции и потребность в электрическом токе.
3. Магнитное поле Земли. Магнитные направления.
Магнитное поле Земли характеризует вектор напряженности Т (полная сила земного магнетизма), который направлен по касательной к магнитным силовым линиям (рис. 1). В общем случае этот вектор составляет некоторый угол I с плоскостью истинного горизонта и не лежит в плоскости истинного меридиана.
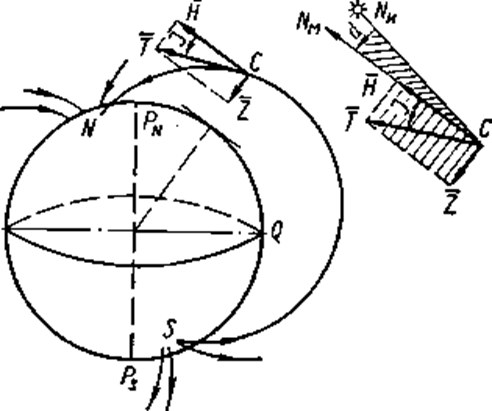
Рис.1. Элементы земного магнетизма
Вертикальная плоскость, проходящая через вектор напряженности магнитного поля Земли в данной точке, называется плоскостью магнитного меридиана. В этой плоскости устанавливается ось свободно подвешенной магнитной стрелки. След от пересечения плоскости магнитного меридиана плоскостью истинного горизонта называется магнитным меридианом.
Угол в плоскости истинного горизонта между истинным меридианом (полуденной линией N — S)и магнитным меридианом называется магнитным склонением (d). Склонение отсчитывается от северной части истинного меридиана к Е или W от 0 до 180°. Восточному (Е) склонению приписывают знак (+), а западному (W) — знак ( — ).
Угол между плоскостью истинного горизонта И вектором полной силы земного магнетизма называется магнитным наклонением (/). На магнитных полюсах наклонение максимально и равно 90°, а по мере удаления от полюсов уменьшается до нулю. Кривая на земной поверхности, образованная точками, в которых магнитное наклонение равно нулю, называется магнитным экватором.
Вектор напряженности магнитного поля Земли можно разложить на горизонтальную (Н) и вертикальную (Z) составляющие (см. рис. 9). Величины Т, Н, Z и I связаны соотношениями
![]()
Горизонтальная составляющая Н направлена по магнитному меридиану и удерживает в нем чувствительный элемент (стрелку, картушку) магнитного компаса. Как видно из формулы, максимальное значение Н принимает при I —0, т.е. на магнитном экваторе, и становится равным нулю на магнитных полюсах. Поэтому в близкополярных районах показания магнитного компаса не надежны, а на магнитных полюсах компас вообще не работает.
Величины d, I, H, Z называются элементами земного магнетизма. Из всех элементов наибольшее значение для судовождения имеет магнитное склонение. Распределение магнетизма на земной поверхности показывают на специальных картах элементов земного магнетизма. Кривыми линиями на карте соединены точки с одинаковыми значениями того или иного элемента. Линия, соединяющая точки с одинаковым значением склонения, называется изогоной. Изолиния нулевого склонения — агона разделяет районы с восточным и западным склонением. Величина магнитного склонения приводится также на морских навигационных картах.
Все элементы земного магнетизма подвержены изменениям по времени — вариациям. Вариации склоненияразличают вековые, суточные и апериодические.
Вековое изменение — это изменение среднегодовой величины склонения из года в год. Годовое изменение склонения (годовое увеличение или уменьшение) не превышает 15' и показывается на морских картах. Суточныеили солнечносуточныевариации склонения имеют период, равный солнечным суткам, по величине незначительны и в судовождении не учитываются. Апериодические изменения или магнитные возмущенияпроисходят без определенного периода.
Магнитные возмущения большой интенсивности, когда в течение нескольких часов все элементы земного магнетизма резко изменяются, называются магнитными бурями. Возникновение магнитных бурь связано с солнечной активностью и наблюдается по всей земной поверхности. Показания компаса во время магнитных бурь ненадежны — склонение может изменяться на несколько десятков градусов.
Магнитные полюсы Земли располагаются сравнительно недалеко от географических, но с ними не совпадают. Кроме того, они постепенно изменяют свое положение.
Вертикальная плоскость, проходящая через ось свободно подвешенной магнитной стрелки, находящейся под действием только сил земного магнетизма, называется плоскостью магнитного меридиана, а линия от пересечения этой плоскости с плоскостью истинного горизонта – магнитным меридианом.
Горизонтальный угол, на который в данной точке Земли плоскость магнитного меридиана отклоняется от плоскости истинного меридиана, называется магнитным склонением d.
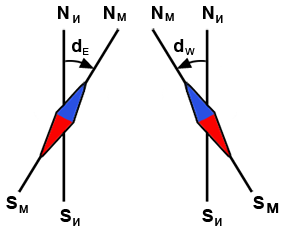
Оно отсчитывается от северной части истинного меридиана Nи к Е или к W от 0 до 180°. Если северная часть магнитного меридиана Nм отклонена от Nи к востоку, то склонение имеет наименование Е (восточное) и ему приписывается знак плюс (+), если к западу, то W (западное) со знаком "минус" (–).
В отдельных точках Земли магнитное склонение отличается как по значению, так и по наименованию. В большей части судоходных районов склонение не превышает 25°Е или W. Исключением являются высокие широты, где склонение может достигнуть десятков градусов, а между одноименными магнитными и географическими полюсами даже 180°.
Чтобы правильно использовать магнитный компас, необходимо знать значение магнитного склонения в районе плавания. С этой целью на навигационные карты наносят значение и наименование склонения. Однако наблюдениями установлено, что значение склонения не остается постоянным даже в одном и том же месте. В отдельных районах за год склонение может изменяться до 0,2–0,3°. Поэтому на навигационных картах указывают также год, к которому отнесено склонение, и значение его годового изменения.
Магнитным курсом (МК) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части магнитного меридиана по часовой стрелке до носовой части диаметральной плоскости судна.
Магнитным пеленгом (МП) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части магнитного меридиана по часовой стрелке до направления на ориентир.
Угол, отличающийся от МП на 180°, называется обратным магнитным пеленгом (ОМП): ОМП = МП ± 180° или МП = ОМП ± 180°.
Магнитные курсы и пеленги могут лежать в пределах от 0 до 360°.
Зная магнитное склонение в данном месте Земли, можно по известным магнитным направлениям получить истинные, а также решить обратную задачу.
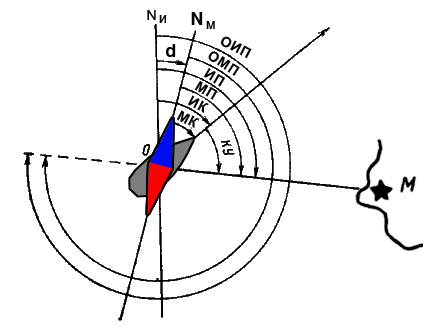
Зависимость между магнитными и истинными направлениями выражается формулами:
ИК = МК + d; ИП = МП + d; ОИП = ОМП + d;
МК = ИК – d; МП = ИП – d; ОМП = ОИП – d.
4. Магнитные компасы.
Морские магнитные компасы — основные навигационные, приборы (несмотря на наличие гирокомпасов), которые служат для определения курса судна и направлений на береговые предметы и небесные светила. По компасу можно также определить приближенное направление ветра и дрейфа судна. Магнитные компасы просты по устройству и в то же время безотказны в работе. Они не связаны ни с источниками энергии, ни с какими-либо другими приборами, и к тому же их стоимость относительно небольшая. Все морские суда снабжаются магнитными компасами, независимо от наличия на них гирокомпасов.
Магнитный компас работает на основе свойства намагниченной стрелки располагаться своей осью вдоль магнитных силовых линий магнитного поля Земли; следовательно, стрелка компаса должна показывать направление магнитного меридиана в данной точке на поверхности Земли. В связи с тем что на магнитную стрелку компаса, установленного на судне, действуют магнитные поля Земли и судового железа, ось магнитной стрелки или линия NS картушки магнитного компаса располагается в плоскости компасного меридиана.
По назначению морские магнитные компасы делятся на главные и путевые.
Главный магнитный компас, как об этом говорит само название, является наиболее важным навигационным прибором, который обычно устанавливают на верхнем мостике в диаметральной плоскости судна в возможной удаленности от влияния судового железа, что обеспечивает наиболее оптимальные условия работы компаса. По главному компасу судоводитель назначает заданный курс, проверяет показания путевого компаса и гирокомпаса, пеленгует береговые объекты для определения места.
Путевой магнитный компас служит как указатель курса и, как правило, устанавливается в рулевой рубке перед рулевым.
В настоящее время все отечественные суда снабжаются 127-миллиметровым морским магнитным компасом. Он обладает достаточной точностью и надежностью показаний, прост в использовании, обслуживании и ремонте.. п.
5. Магнитное поле судна. Девиация магнитного компаса. Компасные направления по МК.
Линия пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через ось магнитной стрелки, находящейся под действием силы земного магнетизма и магнитных сил судового железа, называется компасным меридианом.
Находящиеся в магнитном поле Земли детали набора и другие стальные и железные части судна постепенно намагничиваются и приобретают свойства магнита. В результате этого в окружающем судно пространстве возникает собственное магнитное поле, действие которого складывается с магнитным полем Земли. Магнитная стрелка судового компаса устанавливается по равнодействующей сил обоих полей, вследствие чего отклоняется от направления магнитного меридиана.
Горизонтальный угол, на который плоскость компасного меридиана отклоняется от плоскости магнитного меридиана, называется девиацией магнитного компаса .
Девиация отсчитывается от северной части магнитного меридиана Nм к Е (со знаком "+") или W (со знаком "–") от 0 до 180°.
На каждом курсе девиация у судовых компасов различна. Это объясняется тем, что при изменении курса меняется положение судового железа относительно магнитных стрелок компаса. Кроме того, после поворота судна судовое железо частично перемагничивается, что также приводит к изменению магнитного поля судна.
Компасным курсом (КК) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части компасного меридиана по часовой стрелке до носовой части диаметральной плоскости судна.
Компасным пеленгом (КП) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части компасного меридиана по часовой стрелке до направления на ориентир.
Угол, отличающийся от КП на 180°, называется обратным компасным пеленгом ОКП: ОКП = КП ± 180° или КП = ОКП ± 180° Компасные курсы и пеленги могут быть в пределах от 0 до 360°.
Зависимость между компасными и магнитными направлениями:
МК = КК + ; МП = КП + ; ОМП = ОКП +
КК = МК – ; КП = МП – ; ОКП = ОМП – .
Между КК, КП и КУ ориентиров при круговом счете сохраняется следующая зависимость:
КП = КК + КУ;
КК = КП – КУ;
КУ = КП – КК.
ПОПРАВКА МАГНИТНОГО КОМПАСА.
Алгебраическая сумма девиации и магнитного склонения, на величину которой компасные направления отличаются от истинных, называется поправкой магнитного компаса:
ΔК = d +
Девиацию и склонение берут со своими знаками, а именно:
Если северный конец магнитной стрелки отклонен от истинного меридиана вправо (к востоку), то склонение и девиация называются восточными и считаются положительными, т.е. в формулы подставляются со знаком "+".
Если же северный конец магнитной стрелки отклонен от истинного меридиана влево (к западу), то склонение и девиация называются западными и считаются отрицательными, т.е. в формулы подставляются со знаком "–".
Задачи, связанные с переходом от компасных курсов и пеленгов к истинным, называются исправлением румбов, а задачи, связанные с переходом от снятых с карты истинных кусов и пеленгов к компасным - переводом румбов.
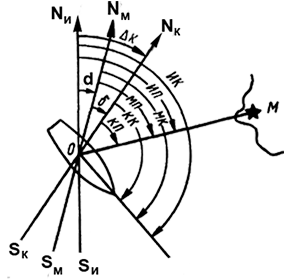
Формулы исправления румбов:
ИК = КК + d + или ИК = КК + ΔК
ИП = КП + d + или ИП = КП + ΔК
ОИП = ОКП + d + или ОИП = ОКП + ΔК
Формулы перевода румбов:
КК = ИК – d – или КК = ИК – ΔК
КП = ИП – d – или КП = ИП – ΔК
ОКП = ОИП – – d или ОКП = ОИП – ΔК
Условные обозначения, используемые в навигационных задачах
Nи – Истиный меридиан – линия пересечения вертикальной плоскости, проходящей через географические полюсы Земли и место наблюдателя, с поверхностью Земли.
Nм – Магнитный меридиан – линия пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через ось свободно подвешенной магнитной стрелки, находящейся под действием только силы земного магнетизма.
Nк – Компасный меридиан – линия пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через ось магнитной стрелки, находящейся под действием силы земного магнетизма и магнитных сил судового железа.
КК – Компасный курс – угол между линией компасного меридиана Nк и линией курса.
КП – Компасный пеленг – угол между линией компасного меридиана Nк и линией пеленга.
МК – Магнитный курс – угол между магнитным меридианом Nм и линией курса.
МП – Магнитный пеленг – угол между линией магнитного меридиана Nм и линией пеленга.
ИК – Истинный курс – угол между линией истинного меридиана Nи и линией курса.
ИП – Истинный пеленг – угол между линией истинного меридиана и линией пеленга.
d – Девиация – угол между линией компасного меридиана Nк и линией магнитного меридиана Nм.
– Склонение – угол между линией магнитного меридиана Nм и линией истинного меридиана Nи.
ΔК – Поправка компаса – угол между линией истинного меридиана Nи и линией компасного меридиана Nк.
ПУ – Путевой угол – угол между линией истинного меридиана и линией, совпадающей с направлением курса судна
6. Компасные направления по ГК.
Главная ось работающего гирокомпаса всегда устанавливается в плоскости так называемого гироскопического или компасного меридиана. Угол между истинным и гироскопическим (или просто компасным) меридианами носит название поправки гироскопического компаса.
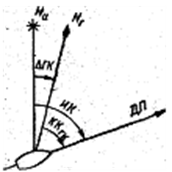
В случаях, когда нордовая часть гироскопического меридиана отклонена от истинного меридиана к востоку, поправке гирокомпаса приписывается знак плюс, и наоборот, когда нордовая часть компасного меридиана отклонена от истинного к западу, поправка гирокомпаса имеет знак минус.
Рассмотрение рисунка позволяет при использовании гирокомпаса установить связь между истинными и компасными направлениями, выражающуюся формулами:
ИК = ККгк + ΔГК
ИП = КПгк + ΔГК
Поправка гироскопического компаса и ее знак определяются по формулам:
ΔГК = ИК - ККгк
ΔГК = ИП - КПгк
Поправка гирокомпаса, вообще говоря, состоит из двух составляющих — постоянной и переменной. Однако здесь мы не будем рассматривать ее составляющие и причины, порождающие их. Это изучается в теории гирокомпасов. Мы будем рассматривать лишь результат — отклонение оси гирокомпаса от плоскости истинного меридиана и считать этот угол поправкой гирокомпаса ΔГК, которой следует исправлять все измеренные направления, если нужно получить истинные.
7. Истинный курс, истинный пеленг, курсовой угол.
Для обеспечения безопасности плавания судна в море необходимо уметь определять направление его движения относительно заданного пути, а также направления на навигационные опасности и видимые с судна ориентиры.
Направления в море определяются относительно истинного меридиана (Nи) и называются истинными направлениями. Зная положение истинного меридиана любое направление на поверхности земли (моря) можно определить углом между нордовой частью этого меридиана и направлением на предмет. При этом величина этого угла измеряется в градусах по круговой системе, т.е. от 0° до 360°.
Направление движения судна определяется истинным курсом.
Истинным курсом (ИК) называется горизонтальный угол между северной частью истинного меридиана и диаметральной плоскостью судна по направлению его движения, измеренный по ходу часовой стрелки.
Диаметральная плоскость, пересекаясь с плоскостью истинного горизонта, образует линию курса судна. Таким образом, истинным курсом ИК является угол между северной частью истинного меридиана и линией курса. Отсчитывается истинный курс в круговой системе счета.
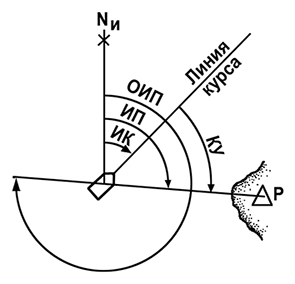
Направлением из точки наблюдения на объект называется линией пеленга.
Направление с судна на естественные и искусственные объекты определяется истинным пеленгом.
Истинным пеленгом (ИП) называется горизонтальный угол между северной частью истинного меридиана и направлением из точки наблюдения на объект, измеряемый по часовой стрелке.
Вертикальная плоскость, проходящая через место наблюдателя и место наблюдаемого объект, называется визирной плоскостью.
Пересечение визирной плоскости с плоскостью истинного горизонта образует линию пеленга, которая и является направлением на объект. Таким образом, истинным пеленгом (ИП) является угол между северной частью истинного меридиана и линией пеленга. Отсчитывается истинный пеленг в круговой системе счета.
При решении отдельных задач используется направление, противоположное истинному пеленгу. Это направление называется обратным истинным пеленгом (ОИП):
ОИП = ИП + 180°, если ИП
ОИП = ИП – 180°, если ИП 180°.
При решении задач, для которых особое значение имеет взаимное расположение курса судна и наблюдаемого объекта, измеряют курсовой угол (КУ) – горизонтальный угол между диаметральной плоскостью судна и направлением на наблюдаемый объект, т.е. угол между носовой частью диаметральной плоскости судна и линией пеленга. Курсовой угол измеряется в круговой или полукруговой системе счета направлений.
В основном курсовые углы измеряют в полукруговой системе и для исключения многозначности им придают наименования, указывающие в сторону какого борта судна (правого или левого) вели счет.
Например: КУ= 15° л/б, КУ= 78° п/б.
При решении задач курсовые углы правого борта считают положительными, а курсовые углы левого борта считают отрицательными.
При решении некоторых задач требуется, чтобы курсовой угол был измерен в круговом счете. Счет при этом ведут от носовой части диаметральной плоскости судна вправо от 0° до 360°. Курсовой угол, измеренный в круговом счете, получил название отсчета курсового угла (ОКУ).
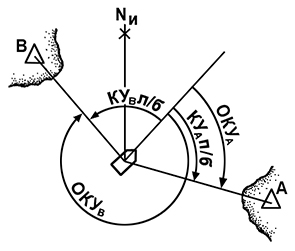
Связь между отсчетом курсового угла и курсовыми углами определяется выражениями:
ОКУ = КУ п/б;
ОКУ = 360° – КУ л/б
Некоторым значениям курсовых углов традиционно присвоены наименования. Например, КУ = 90° – направление, перпендикулярное диаметральной плоскости корабля – называют траверзом.
Математическая зависимость между истинными направлениями:
ИП = ИК + КУ;
ИК = ИП – КУ;
КУ = ИП – ИК.
При расчетах по этим формулам следует помнить о необходимости учитывать знак курсового угла. Другая особенность заключается в том, что истинный курс и истинный пеленг не могут иметь отрицательных значений. Если все же при решении задач будет получено отрицательное значение ИК или ИП, то его следует вычесть из 360°, а полученный результат считать положительным.
Двугранный угол между нордовой частью плоскости истинного меридиана и вертикальной плоскостью, совпадающей с линией перемещения судна называется путевым углом (ПУ).
8. Определение поправок курсоуказателей.
Определение поправки компаса по пеленгу ориентира, место которого нанесено на карту. Сущность этого способа состоит в сравнении истинного пеленга на отдаленный предмет с измеренным на него компасным пеленгом. Для этого необходимо, чтобы места корабля и наблюдаемого объекта (т. е. их координаты) в момент наблюдений были известны. Истинный пеленг с корабля на маяк может быть рассчитан (при известных координатах того и другого) аналитически или снят непосредственно с карты крупного масштаба, компасный пеленг измеряется с помощью компаса. Тогда определяемая поправка компаса найдется по формулам
Δ МК = ОИП - ОКПмк— для магнитного компаса
и
Δ ГК = ИП - КПгк —для гироскопического компаса.
Вследствие того что место наблюдаемого ориентира, как правило, бывает известно с высокой точностью, ошибка в определяемой поправке компаса зависит главным образом от того, насколько точно известно мести корабля, т. е. его координаты. Поэтому рассматриваемый способ определения поправки компаса применяется чаще всего при стоянке корабля в гавани или на рейде, когда место корабля может быть определено высокой точностью. На ходу этот способ может быть применен лишь в том случае, когда имеется реальная возможность определить свое место с ошибкой, не превышающей 25 - 50 метров.
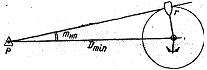
Выбор достаточно удаленного ориентира, когда определение поправки компаса осуществляется с якорного места, должен производиться с таким расчетом, чтобы изменение пеленга за счет разворачивания корабля на якорной цепи не превышало допустимой ошибки в определяемой поправке компаса. Принимая допустимую ошибку определения пеленга mп = ± 0,2° и радиус окружности разворота корабля на якорной цепи r = 50 м, найдем минимальное расстояние Дmin от корабля до наблюдаемого ориентира, при котором возможно применять этот способ определения Δ К:
Dmin = r * ctg mп = r / tg mп = r / mп *arc 1° = 50 * 57,3° / 0,2° = 8 миль.
Следовательно, чтобы определить с ошибкой, не превышающей mп = ±0,2° поправку компаса с якорной позиции по отдаленному ориентиру, нужно последний выбирать на расстоянии не менее 8 миль от места корабля.
Если почему-либо компасный пеленг измерить не представляется возможным, но может быть измерен КУ на него, то искомый КП может быть рассчитан по формуле
КП = КК + КУ
В этом случае одновременно с измерением курсового угла на ориентир необходимо заметить компасный курс.
Определение поправки компаса по сличению показаний двух курсоуказателей. Поправка компаса может быть определена путем сличения его показаний с показаниями другого компаса, поправка которого известна. Сущность способа состоит в том, что в один и тот же момент по сигналу замечаются курсы по обоим компасам. После наблюдений показания второго компаса исправляются его поправкой и из сравнения рассчитанного истинного курса с наблюденным компасным курсом исследуемого компаса находится искомая поправка
ККгк + ΔГК = ИК;
ИК - ККмк = ΔМК
Δ МК = (ККгк - ККмк) + Δ ГК
Разность одновременно замеченных показаний курсов двух компасов (ККгк - ККмк)называется сличением.
Таким образом, определяемая поправка компаса равна сличению плюс поправка компаса, с которым производится сличение. В примере приведен порядок определения Δ МК по сличению с ГК, хотя в принципе сличать можно показания любых курсоуказателей. Важно лишь, чтобы поправка одного из них была известна. Чаще этим способом определяется поправка магнитного компаса.
Определение поправки компаса по пеленгу небесного светила. Сущность способа состоит в том, что поправка компаса находится как разность рассчитанного истинного пеленга на небесное светило (Солнце, Луну, планету, звезду) и наблюденного на него компасного пеленга. Расчет истинного пеленга светила на момент наблюдения компасного пеленга производится по формулам сферической тригонометрии с применением специальных таблиц.. Вывод формул и порядок вычислений по ним подробно излагаются в мореходной астрономии (мы постараемся учебник по мореходной астрономии на сайте разместить в ближайшее время) и поэтому здесь не приводятся. Результаты вычислений истинного пеленга (ИП) на светило и наблюдений его с помощью компаса (КП) реализуются для получения искомой поправки компаса по формулам .
Контрольные вопросы:
1. Системы деления горизонта?
2. Компасный курс?
3. Склонение?
4. Поправка магнитного компаса?
5. Классификация магнитных компасов?
6. Курсовой угол (КУ)?
7. Истинным пеленгом (ИП)?
Практическое занятие
Приведение магнитного склонения к году плавания.
Соотношения между направлениями.
Просмотр содержимого документа
«Лекция Т.1.3.»
Тема 1.3. Определение скорости судна и пройденного расстояния.
План лекции № 4
1. Приборы для измерения скорости и пройденного расстояния.
2. Поправка и коэффициент лага.
3. Мерная линия. Определение скорости судна и поправки лага.
Цель занятия:
Знать:
- приборы для определения скорости судна и пройденного расстояния;
- мерную линию и порядок определения поправки лага.
Уметь:
- решать задачи по расчету поправки лага;
- определять скорость судна на мерной линии.
1. Приборы для измерения скорости и пройденного расстояния.
Лаг - это прибор, предназначенный для измерения скорости хода судна и пройденного им расстояния.
Ручной лаг (рис. 1) применяется, как правило, только на небольших судах. Он состоит из тяжелого фанерного треугольника сектора, прикрепленного к линю - лаглиню. К нижней кромке сектора крепится свинцовая пластина, которая придает сектору в воде вертикальное положение.
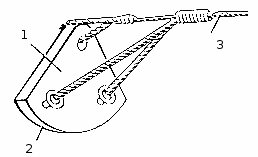
Рис. 1. Ручной лаг. 1 - сектор; 2 - свинцовая пластина; 3 — лаглинь
На лаглине через каждые 7,71 м завязаны узлы. Лаглинь изготавливается из бель-ного растительного троса толщиной 25 мм. Для измерения скорости сектор бросается за борт и замечается число узлов, прошедших за 15 с. Это число укажет величину скорости судна (1 уз. = 7,71 м за 15 с).
Механический лаг (рис. 2.) представляет собой прибор, состоящий из вертушки, линя и счетчика. Вертушка буксируется судном на лине и в зависимости от числа оборотов вертушки на счетчике показывается пройденное расстояние в милях.
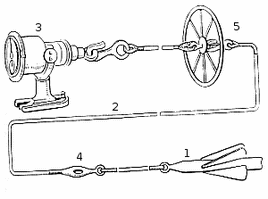
Рис. 2. Механический лаг. 1 - вертушка; 2 - лаглинь; 3 - счетчик; 4 - соединительная груша; 5 - маховое колесо.
Имеются модели счетчика, которые помимо расстояния показывают и скорость судна в узлах, которая определяется по числу десятых долей мили, пройденных за 6 минут. Вертушечный лаг имеет вертушку (турбинку) типа мельничного колеса или турбинки (небольшого винта), частота вращения которой с помощью электронных средств или механических передается на дистанционный указатель скорости и пройденного расстояния. Вертушка устанавливается ниже уровня ватерлинии с креплением к корпусу (днищу) судна. Это обстоятельство имеет преимущество перед механическим лагом, который из-за буксирующего линя не может применяться в местах интенсивного движения судов.
Гидродинамический лаг (рис. 3). В основу работы этого лага положено измерение скоростного напора воды с помощью так называемой трубки Пито и мембраны.
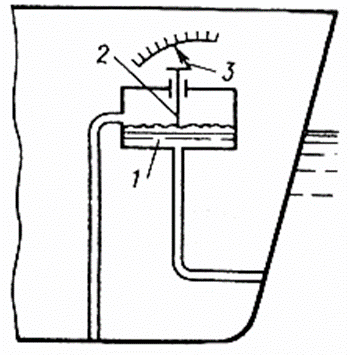
Рис.3. Гидродинамический лаг. 1- скоростное давление ; 2-мембрана; 3- стрелка, указатель скорости
Во время стоянки судна на мембрану с обеих сторон действует равное статическое давление воды. С началом движения на мембрану снизу начинает воздействовать скоростное давление, пропорционально квадрату скорости натекания воды, т.е. скорости хода судна. При этом мембрана начинает прогибаться вверх и через шток передавать свое давление стрелке. Угол отклонения стрелки от первоначального положения пропорционален скорости хода судна. Для измерения пройденного расстояния используется электромеханическая схема, которая автоматически подсчитывает пройденное расстояние. Гидродинамические лаги измеряют скорость хода судна более точно, чем механические и электромеханические, но из-за выдвижной трубки Пито могут быть повреждены при плавании на мелководье.
Гидроакустический лаг - гидроакустическая станция для определения скорости судна относительно морского дна и угла сноса судна. Гидроакустический лаг называют также абсолютным лагом. Абсолютный лаг, работающий по принципу эхолота. Обеспечивает достаточную точность при глубинах, не превышающих 300 метров
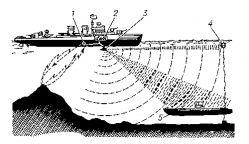
Существуют 2 типа гидроакустических лагов: доплеровский и корреляционный. Принцип действия доплеровского гидроакустического лага основан на измерении смещения частоты отраженного от дна сигнала, излученного с судна. В доплеровском гидроакустическом лаге обычно используются 2 пары противоположно направленных по отношению к грунту акустических лучей, причем каждая пара предназначена для измерения какой-либо одной составляющей вектора скорости — продольной или поперечной. В корреляционном гидроакустическом лаге используется малонаправленное излучение вертикально вниз и прием сигналов в нескольких (2 — 4) точках на днище судна. Принцип действия корреляционного гидроакустического лага основан на измерении временного сдвига между реализациями отраженных от грунта сигналов, принятых в 2 точках, обеспечивающие максимум функции взаимной корреляции огибающих указанных сигналов, промодулированных при отражении от неровностей и шероховатостей грунта. Гидроакустический лаг нашел наибольшее применение в составе навигационных комплексов подводных аппаратов, а также супертанкеров. Может использоваться также для определения скорости судна относительно глубинных малоподвижных звукорассеивающих слоев моря.
2. Поправка и коэффициент лага.
Поправка лага и ее определение. Все лаги показывают скорость только относительно воды. Следует также иметь в виду, что пройденное расстояние определяется с некоторой ошибкой, зависящей от скорости судна. Поэтому показания лага необходимо направлять поправкой. Постоянство поправки лага на данной скорости служит показателем достоинства прибора.
Поправка лага, относящаяся к разности его показаний, выражается формулой

где S — истинное пройденное судном расстояние;
ол2 — ол1 ,— разность отсчетов лаг а по счетчику пройденного расстояния.
Из формулы (14) можно определить истинное расстояние
![]()
Вместо поправки лага иногда применяют коэффициент лага, который, воспользовавшись формулой (14) и (15) , можно выразить следующим образом:

Из формулы (16) истинное расстояние
![]()
3. Мерная линия. Определение скорости судна и поправки лага.
Для определения поправки лага необходимо знать истинное- расстояние, пройденное судном, и разность отсчетов лага (рол) , соответствующую промежутку времени, затраченному на прохождение этого расстояния.
Поправку лага определяют на специально оборудованном участке, называемом мерной линией.
Мерная линия представляет собой свободный от навигационных опасностей, защищенный от ветров и волнений водный полигон с достаточной глубиной, предназначенный дл я скоростных испытаний судов.
На мерной линии основной является линия ведущего створа АА' (рис. 15), по которому судно следует во время испытаний.
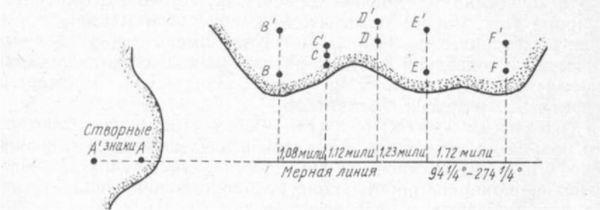
Рис. 15.
Перпендикулярно ведущему створу устанавливают секущие створы ВВ' , СС',... и т. д., отбивающие на ведущем створе точно измеренные расстояния не менее 1 мили.
Зная действительно пройденное судном расстояние и разность отсчетов лага, поправку рассчитывают по формуле (14). Поправка соответствует определенной скорости судна. Делая пробеги на мерной линии с различными скоростями хода, определяют различные значения Ал%. Обычно поправку лага находят для трех скоростей судна, соответствующих работе машины на режимах «полный ход», «средний ход», «малый ход». В дальнейшем поправку лага для данной скорости выбирают линейным интерполированием.
При движении судна в море пройденное расстояние определяется с помощью показаний лага и его поправки по формуле (15). Для облегчения работы судоводителя в МТ-63 приведены вспомогательные таблицы для определения пройденного расстояния при положительных и отрицательных поправках лага.
Контрольные вопросы:
1. Прибор для определения скорости и пройденного расстояния?
2. Поправка лага?
3. Необходимость мерной линии?
Практическое занятие
Расчеты на мерной линии. (2 часа)
Просмотр содержимого документа
«Лекция Т.1.4»
Тема 1.4. Основные сведения о картографии и картографических проекциях.
План лекция № 5
Основные определения. Классификация картографических
проекций.
2. Проекция Меркатора.
3. Проекция Гаусса.
4. Гномоническая проекция.
Цель занятия:
Знать:
- основные определения и классификацию картографических проекций;
- достоинства и недостатки картографических проекций.
Уметь:
- различать карты по картографическим проекциям.
Основные определения. Классификация картографических
проекций.
При осуществлении перехода по наивыгоднейшему пути судоводителю необходимо иметь отчетливое представление о взаимном расположении пунктов отхода и прихода, о навигационных условиях, через которые проходит трасса выбранного пути, а также знать гидрометеорологическую обстановку на тот период времени, в течение которого будет проходить плавание.
Изучение районов земной поверхности, в которых предполагается плавание судов, осуществляется с помощью специальных навигационных пособий.
Наиболее распространенным видом навигационных пособий являются морские карты. Они используются для ведения навигационной прокладки, составления навигационно-гидрографических обзоров и дают разнообразные справочные сведения, необходимые судоводителю для изучения района плавания.
Карты изображают на плоскости земную поверхность или часть ее в определенном масштабе. Земля имеет сферическую форму, и изобразить ее на плоскости без искажений невозможно. Поэтому любая карта земной поверхности имеет искажения того или иного характера.
Способ условного изображения поверхности Земли на плоскости называют картографической проекцией, а полученную при этом систему меридианов и параллелей — картографической сеткой. При этом каждой точке на изображаемой поверхности соответствует однозначная точка на плоскости.
Классификация картографических проекций.
Существует много видов картографических проекций. Их можно классифицировать по следующим двум важнейшим признакам:
- по характеру искажений (по свойствам изображений), которые имеет данная карта;
- по виду меридианов и параллелей нормальной картографической сетки.
По характеру искажений проекции делят на:
- равноугольные (конформные);
- равновеликие (эквивалентные);
- произвольные виды проекций.
Равноугольные (конформные)
На картах в конформной проекции бесконечно малые фигуры изображаются подобными соответствующим фигурам на земной поверхности. Например, бесконечно малый кружок на земной поверхности изобразится на карте в равноугольной проекции также кружком. Подобие фигур обусловливает равенство соответствующих углов. Поэтому на картах в конформной проекции сохраняется равенство углов между какими-либо направлениями на местности и теми же направлениями на карте. Отсюда и название проекции — равноугольная (конформная). На картах в такой проекции невозможно сохранить эквивалентность площадей.
Равновеликие (эквивалентные)
На картах в равновеликой (эквивалентной) проекции сохраняется пропорциональность площадей соответствующим площадям на земной поверхности, но не сохраняется подобие фигур. Например, бесконечно малый кружок на земной поверхности изобразится на карте в равновеликой проекции, пропорциональным по площади эллипсом. Пропорциональность площадей сохраняется в равновеликих проекциях независимо от размеров изображаемой площади.
Произвольные
Произвольные проекции не сохраняют ни равенства углов, ни пропорциональности площадей, но они обладают особыми специальными свойствами. Из числа произвольных проекций часто выделяют равнопромежуточные проекции, обладающие промежуточными свойствами между равноугольными и равновеликими проекциями. В таких проекциях масштаб сохраняет свою величину по одному из главных направлений.
По виду меридианов и параллелей нормальной картографической сетки различают:
- конические;
- цилиндрические;
- азимутальные;
- перспективные;
- условные проекции.
При конических и цилиндрических проекциях земную поверхность проектируют по тому или иному закону на боковую поверхность касательного или секущего конуса или цилиндра, с последующей разверткой этой поверхности в плоскости. Различают нормальные, поперечные или косые конические или цилиндрические проекции в зависимости от того, совпадает ли ось конуса или цилиндра с осью Земли, с экватором или занимает некоторое промежуточное положение.
При азимутальной проекции земную поверхность проектируют на касательную к ней плоскость.
Перспективные проекции являются частным случаем азимутальных проекций и отличаются от последующих тем, что строятся по законам перспективы.
Условные проекции предполагают построение картографических сеток, исходя из тех или иных предварительно поставленных условий, исполнение которых позволяет создать проекции, обладающие необходимыми достоинствами. Таких проекций можно мыслить бесконечно большое число.
Проекция Меркатора.
Во время плавания необходимо вести учет движения судна в море. Для этого наиболее удобен и нагляден графический способ учета, связанный с прокладкой на карте пути судна и с построением углов, под которыми с судна наблюдают различные предметы. Поэтому к морской карте предъявляются следующие требования:
- линия пути судна, следующего одним и тем же курсом (локсодромия), должна изображаться на карте прямой;
- картографическая проекция должна быть равноугольной.
Этим требованиям удовлетворяет равноугольная нормальная цилиндрическая (меркаторская) проекция. Свое второе название эта проекция получила по имени предложившего ее впервые в 1569 г. голландского ученого Кремера (Меркатора). Рассмотрим эту проекцию,
Пусть вокруг земного шара описай цилиндр, ось которого совпадает с осью вращения Земли. Такой цилиндр (рис. 1) касается земного шара по экватору в точках EABCGFQ. Если на боковую поверхность этого цилиндра спроектировать изображения земных меридианов и параллелей, а затем его развернуть по одной из образующих, то получим нормальную цилиндрическую проекцию. На этой проекции все меридианы и параллели изображены прямыми линиями, образуя прямоугольную сетку. На такой сетке расстояния между меридианами пропорциональны разностям соответствующих им долгот, а расстояния D параллелей от экватора являются функцией широты. Исходя из требований, предъявляемых к морской карте, эта функция DI = f (φi) должна удовлетворять условиям равноугольности, т. е. конформности.
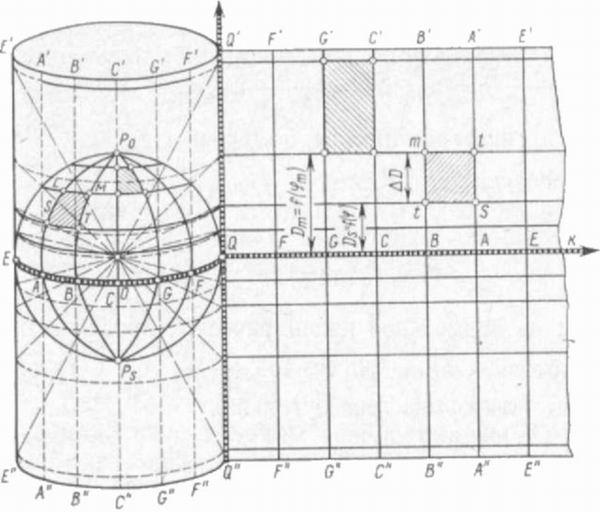
Рис. 1
Возьмем на поверхности земного шара участок LMTS (рис. 1 — сфера), образованный пересечением меридианов и параллелей, и соответствующую этому участку фигуру lmts на нормальной цилиндрической проекции. Фигуры LMTS и lmts должны быть подобными — только в этом случае проекция будет конформной. Тогда

Определим значение сторон отмеченных фигур следующим образом:
ТМ = AS — отрезок дуги меридиана;
TS = rAЛ — длина дуги параллели между меридианами точек S и T (r — радиус параллели точек S и Т);
ts = ВA = R-AЛ — длина дуги параллели на проекции, равная длине изображения дуги экватора В A (R — радиус земного шара);
tm = AD - разность расстояния двух параллелей от экватора по меридиану.
Тогда выражение (28) получит вид
а так как r=R cos φ и АS=RAφ, то
Переходя к дифференциалам, получим

или

Итак, если на нормальной цилиндрической проекции параллель проводить на расстоянии
![]()
от экватора, то такая проекция будет конформна (равноугольна).
Величину D, выраженную в минутах дуги экватора, называют меридиальной частью данной параллели.
Уравнение прямой линии на меркаторской проекции выведем, подставляя в общий вид уравнения прямой с угловым коэффициентом вместо текущих координат их выражение через φ и λ.
Полагая y = D = R In tg (45°+φ/2); x = Rλ (см. рис. 25), получим следующий вид уравнения прямой линии на равноугольной цилиндрической проекции: проекция будет конформна (равноугольна).
![]()
Кратчайшим расстоянием между двумя точками на земной поверхности является дуга большого круга-ортодромия , пересекающая все меридианы под разными углами. При плавании по ортодромии приходится постоянно менять курс судна, производя трудоемкие л громоздкие вычисления. Поэтому к плаванию по ортодромии прибегают только при больших океанских переходах (тысячи миль). Меньшие переходы делают постоянным курсом, линия которого на поверхности Земли представляет кривую двоякой кривизны — локсодромию. Локсодромия пересекает все меридианы под одним и тем же углом, спиралеобразно приближаясь к земному полюсу. Выведем уравнение локсодромии.
Пусть радиус Земли равен R (рис. 2), а радиус некоторой параллели АВ — r. Тогда выражение
![]()
определяет соотношение между длиной экватора и длиной параллели в широте φ.
Пусть дуга М0С есть локсодромия с двумя произвольными точками на ней Mi (φ1 ,λ1) и М2 (φ2 ,λ2); К — угол пересечения локсодромии с земными меридианами. Тогда из треугольника MM1M2, который из-за малых размеров можно считать плоским и прямоугольным при вершине М, имеем
Обозначим DF = Аλ, MM1 = Аφ. Переходя к дифференциалам, получим
на основании чего можем записать
Так как tg К — постоянная величина, то уравнение локсодромии получает следующий окончательный вид:

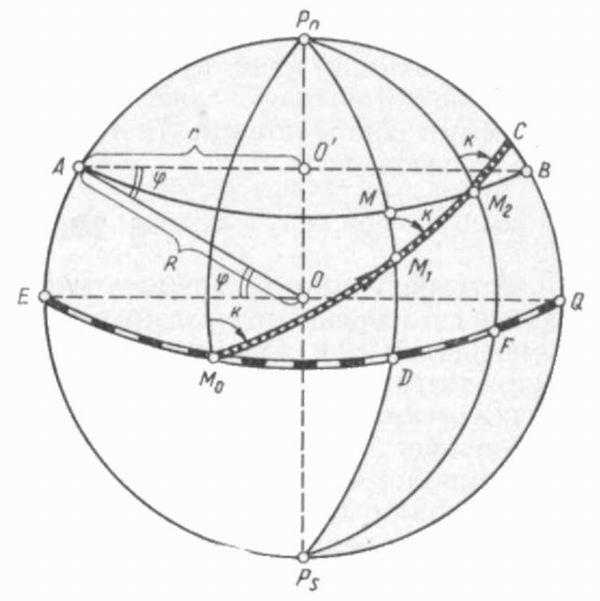
Рис. 2.
Сравнение выражений (27) и (30) показывает, что локсодромия изображается на меркаторской карте прямой линией.
Проекция Гаусса.
Сущность равноугольной поперечно-цилиндрической поверхности, которая называется проекцией Гаусса, состоит в следующем.
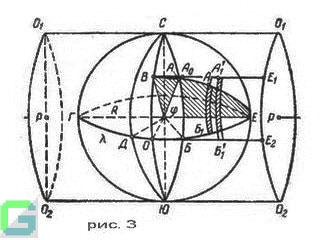
На рис. 3 изображена уровненная поверхность Земли, принимаемая в первом приближении за шар радиуса R, где северный и южный полюсы соответственно находятся в точках С и Ю. Мысленно поместим земной шар в цилиндр так, чтобы поверхность цилиндра касалась шара по некоторому меридиану ЮОВС. При этом ось цилиндра пройдет через центр шара и будет перпендикулярна плоскости меридиана касания.
На поверхности земного шара возьмем точку А, положение которой определяется географическими координатами – широтой S, равной дуге БА меридиана, проходящего через точку А, и долготой L, равной дуге ГДБ экватора.
Если через точку А и ось цилиндра РР проведем плоскость, которая в сечении на шаре образует дугу большого круга ЕАВ, перпендикулярную меридиану касания в точке В, то положение точки А может быть определено отрезками дуг больших кругов ОВ=XA и ВА=YА, которые принято называть сферическими прямоугольными координатами точки А. Если при этом будет известна долгота меридиана касания, то положение точки А на поверхности шара вполне определится.
Если дугу ОЕ экватора и дугу ВЕ большого круга ВАЕ мысленно выпрямить и совместить с поверхностью цилиндра так, чтобы они оставались перпендикулярными к меридиану касания, то эти дуги займут положение образующих цилиндра ОЕ2 и ВЕ1, а точка А сферы займет на поверхности цилиндра положение А0; при этом ее сферические координаты XА=ОВ (сферическая абсцисса) и YА=ВА=ВА0 (сферическая ордината) останутся без изменений.
Мысленно разрежем цилиндр по образующим О1О1 и О2О2, затем развернем его на плоскость. При развертке цилиндра меридиан касания СОЮ обращается в прямую линию и служит осью абсцисс, а выпрямленная дуга экватора ОЕ2 – осью ординат плоской прямоугольной системы координат. Начало этой системы координат окажется в точке О на экваторе.
На рис. 4 представлена развернутая на плоскость часть земного шара, ограниченная меридианами СДЮ и СБ0Ю, назначение которых выясним далее.
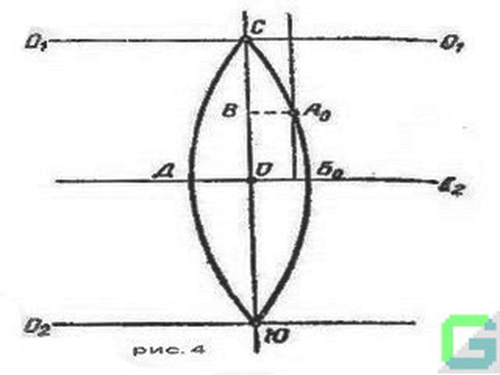
Таким образом, если нам будут известны сферические координаты некоторой точки А, то по этим координатам можно определить ее положение А0 на плоскости развернутого цилиндра.
Однако такая проекция неудобна, так как при этом не сохраняется подобие фигур. Например, элемент А1Б1 (полоска) поверхности земли при переносе с шара на цилиндр, а следовательно и на плоскость удлиняется вдоль оси абсцисс и становится равной величине А'1В'1 (рис. 3). Чтобы достигнуть подобия фигур при перенесении их с шара на плоскость, искусственно вводят искажение и по оси ординат. При этом делается это так, чтобы искажение по оси ординат было одинаковой меры с искажением по оси абсцисс данного места.
В результате такого преднамеренного увеличения размеров фигуры в направлении оси ординат, размеры ее окажутся большими в сравнении с действительными размерами на поверхности Земли.
Увеличение размеров фигур будет тем больше, чем дальше они будут расположены от меридиана касания по долготе. В высшей геодезии доказывается, что для обеспечения подобия фигур в малых частях нужно сферические ординаты точек умножать на множитель: 1 + Y2/6R2, т. е. для точки А0 (рис. 3) величина ординаты на плоскости будет :
yА = Y А (1 + Y2/6R2), (1)
где:
YА – сферическая ордината точки А на поверхности Земли;
R – радиус Земли.
Абсцисса хА точки А0 на плоскости останется равной ее сферической абсциссе ХА, т. е. хА = ХА.
Таким образом, если по оси абсцисс будем откладывать абсциссы х1 точек, равные их сферическим абсциссам Х1, а по оси ординат – ординаты, вычисленные по формуле (1), то на плоскости получим фигуры, подобные фигурам на поверхности земли, т. е. с равными углами. Такую проекцию принято называть равноугольной или конформной проекцией.
Вследствие увеличения размеров фигур при перенесении их вышеописанным способом с поверхности Земли на плоскость произойдет и увеличение длин во всех направлениях, т. е. длины на плоскости проекции окажутся больше соответствующих длин на поверхности земли, благодаря чему возникает необходимость введения специальных поправок в длины, измеренные на местности и приведенные к уровню моря.
В высшей геодезии доказывается, что поправка на увеличение длины при перенесении ее с поверхности Земли на плоскость проекции определяется в первом приближении по формуле:
dS = S y2/2R2, (2)
где:
dS – погрешность;
S – длина линии на местности;
R – радиус Земли
При удалении точек от меридиана касания на 3 град. по долготе величины поправок за искажение длин будут меньше ошибок измерения при топографических съемках. Поэтому, если ограничиться полосой поверхности Земли, заключенной между меридианами СБЮ и СДЮ (рис. 3, 4), отстоящими от меридиана касания на 3 град. долготы, то в пределах такой шестиградусной полосы или зоны нет необходимости вводить поправки при производстве мелкомасштабных топографических съемок. Благодаря этому условились при применении рассматриваемой проекции делить всю поверхность Земли меридианами на шестиградусные или трехградусные зоны по долготе. Трехградусные зоны применяются при крупномасштабных съемках.
проекция Гаусса
Для каждой зоны строится свой цилиндр, касающийся поверхности Земли по среднему меридиану зоны, который принято называть осевым меридианом. Долгота осевого меридиана для каждой зоны определяется по формуле:
6o n – 3o
(где n – номер зоны).
В каждой такой зоне начало прямоугольной системы координат будет в точке пересечения осевого меридиана с экватором.
В северном полушарии абсциссы положительны, ординаты имеют знак плюс к востоку от осевого меридиана и знак минус к западу. Иногда при составлении некоторых топографических карт ко всем ординатам прибавляется 500 км для устранения отрицательных их значений; кроме того, впереди записывается номер зоны.
Как известно, для определения взаимного положения пунктов опорной сети района съемок необходимо знать координаты хотя бы одного пункта. В высшей геодезии выводятся формулы перехода от географических координат пункта к прямоугольным плоским координатам с учетом всех искажений поперечно-цилиндрической проекции. Следовательно, для того, чтобы определить плоские прямоугольные координаты какой-либо точки поверхности Земли, нужно определить ее географические координаты, а затем обратиться к формулам высшей геодезии и вычислить по ним плоские прямоугольные координаты поперечно-цилиндрической проекции.
Такое свойство рассмотренной проекции позволило принять ее, как единую государственную систему координат.
Достоинства поперечно-цилиндрической проекции велики:
- на плоскости получается прямоугольная система координат, удобная для графических построений и для решения задач аналитическим путем.
- при производстве большинства топографических и маркшейдерских съемок нет необходимости вводить поправки в измерения за приведение их на плоскость проекции и тем осложнять вычисления.
- поперечно-цилиндрическая проекция обеспечивает возможность использования каждого плана, как составной части общего картографирования страны
4. Гномоническая проекция.
При больших океанских переходах часто прибегают к плаванию по дуге большого круга — ортодромии. Прокладка ортодромии на карте меркаторской проекции — дело сложное, требующее трудоемких предварительных вычислений. В то же время существует такая картографическая проекция, на которой дуга большого круга, а также меридианы прокладываются в виде прямой линии. Карты, выполненные в такой проекции, называемой центральной (гномонической), широко используются в морском судовождении, несмотря на то, что проекция не конформна, локсодромия на ней выглядит в виде кривой линии и с такой карты очень трудно производить снятие расстояний.
Известно, что большой круг есть кривая, плоскость которой проходит через центр сферы, т. е. через точку зрения, поэтому любая дуга большого круга на центральной проекции изобразится обязательно только в виде прямой линии. Карты в гномонической проекции используются для расчетов плавания в открытом море по дуге большого круга, т. е. для прокладки на них ортодромических курсов и пеленгов, изображающихся на таких картах в виде прямых линий. Наглядное представление об изображении ортодромии (точечная линия) и локсодромии (сплошная линия) на гномонической а и меркаторской б проекциях дает рис.53.
Гномоническая проекция(1) — древнейшая из всех известных, принадлежит к одному из видов азимутальных (перспективных) проекций.
Гномоническая карта получается при проектировании земной поверхности на плоскость, касательную к ней, при условии, что глаз наблюдателя расположен в центре Земли.
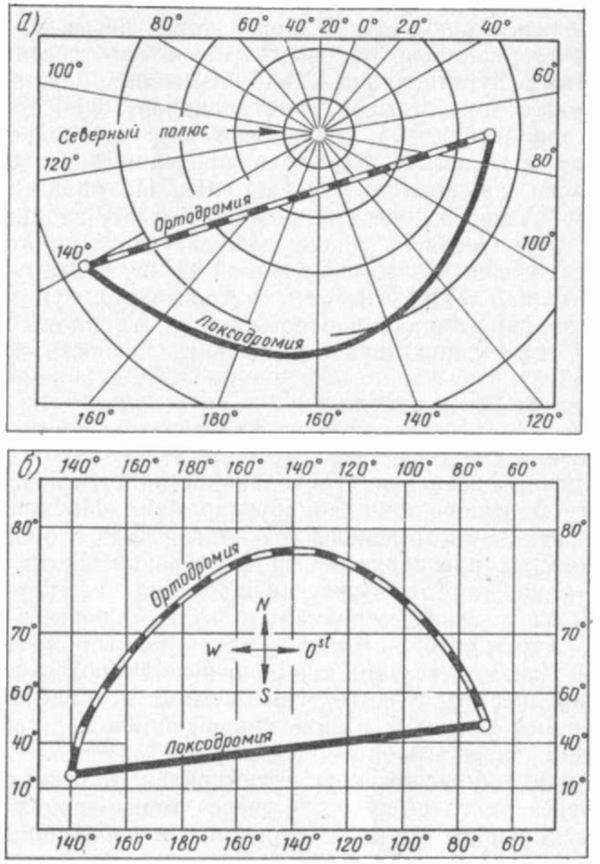
Рис. 5.
В зависимости от географического положения точки касания (центральной течки) гномонические проекции делят на три типа:
- нормальной, прямой или полярной (рис. 6, а) называют проекцию, если центральная точка совпадает с одним из географических полюсов Земли;
- поперечной или экваториальной (рис. 6, б) — если центральная точка находится на экваторе;
- при горизонтальной или косой проекции (рис. 6, в) центральная точка находится между полюсами и экватором.
Наиболее употребительны карты в нормальной (полярной) гиомонической проекции. В этой проекции, в частности, составлены карты океанов и околополярных районов земной поверхности.
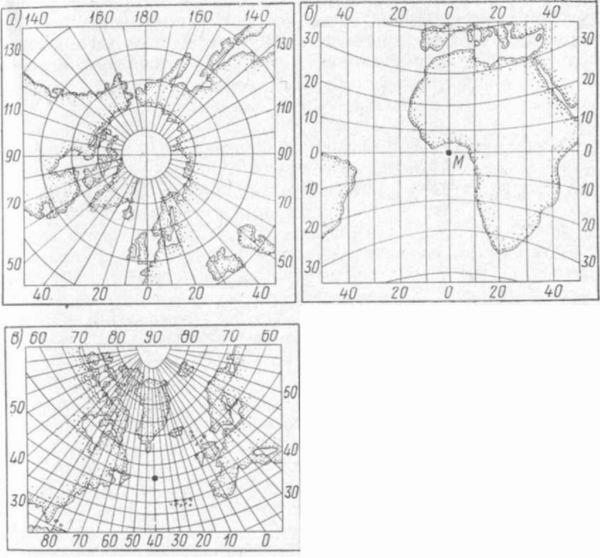
Рис. 6.
Карты в поперечной центральной проекции удобно использовать для изображений экваториальных областей звездного неба
Контрольные вопросы:
1. По виду меридианов и параллелей нормальной картографической сетки делят на?
2. Почему проекция Гаусса носит название: «Равноугольная поперечно-цилиндрическая»?
3. Как изображаются меридианы и параллели в проекции Гаусса?
4. По характеру искажений проекции делят на?
5. В чем достоинства поперечно-цилиндрической проекции?
Просмотр содержимого документа
«Лекция Т.1.5.»
Тема 1.5. Назначение и классификация морских навигационных карт.
План лекции№ 6-7
1.Классификация морских навигационных карт.
2.Компоновка, нумерация и оценка достоверности МНК. Подъем карт.
3.Задачи, решаемые на МНК.
4.Прокладочный инструмент.
5.Особенности английских морских карт.
Цель занятия:
Знать:
- назначение, классификацию и компоновку навигационных карт;
- электронные навигационные карты;
- судовую коллекцию карт и пособий, их корректуру и учет;
- условные знаки на навигационных картах.
Уметь:
- свободно читать навигационные карты;
- осуществлять подъем карт;
- работать с масштабом карт.
1.Классификация морских навигационных карт
Морские карты различаются по своему назначению, экваториальной принадлежности, по масштабам, проекциям и другим признакам. Однако все морские карты можно разделить на два основных типа: навигационные и вспомогательные, справочные.
Навигационные морские карты предназначены для обеспечения безопасного плавания судна. На них выполняют счисления пути судна и определяют его местонахождение. На таких картах подробно отражены рельеф морского дна, характер берега и вся навигационная обстановка в районе, описываемом данной картой. Выбор масштаба морских навигационных карт обусловлен удалением от берега трасс следования судов. Понятно, что по мере приближения к берегу условия плавания в общем случае усложняются, возможность выбора курсов ограничивается, количество навигационных опасностей увеличивается. Поэтому на такой карте необходимо иметь большую подробность в элементах содержания (большую нагрузку карты), что требует большего масштаба карты.
Навигационные морские карты подразделяются на:
- общие;
- специальные.
Общие карты подразделяют на:
- генеральные;
- путевые;
- частные карты;
- планы.
Генеральные (обобщенные) карты предназначены для общего изучения условий плавания в большом водном бассейне, счисления пути судна при плавании в открытом море, предварительной прокладки маршрута предстоящего перехода и общих навигационных расчетов. Такие карты обычно составляют в масштабах от 1:5 000 000 до 1:500 000. На генеральных картах нанесены важнейшие маяки, навигационные опасности, расположенные на значительном удалении от берега, плавучие средства навигационного ограждения, выставленные у опасностей, лежащих вдали от берегов,
Путевые карты предназначены для обеспечения плаваний вдоль побережий на некотором удалении от берегов, а также для обеспечения подходов судна с моря к берегу; составляются в масштабах от 1:500 000 до 1:100 000. На путевых картах нанесены маяки, огни и знаки, обеспечивающие прибрежное плавание, все навигационные опасности, плавучие средства навигационного ограждения.
Частные карты служат для обеспечения плавания в непосредственной близости от берегов, в стесненных навигационных условиях (узкости, проходы, фарватеры и т. п.); составляются в масштабах от 1:75 000 до 1:25 000. Частные карты представляют собой более подробные путевые карты. На них нанесены все маяки, огни и знаки, включая рейдовые и портовые, все навигационные опасности, включая малые банки и камни, все плавучие средства навигационного ограждения.
Планы необходимы для обеспечения входа в порты, гавани, бухты, на рейды и для ориентировки при передвижении в пределах этих акваторий. Планы составляют в масштабах от 1:25 000 до 1:500. На них наносят те же элементы морской обстановки, что и на частные карты. По внешнему виду план отличается от карты тем, что его рамка не разбита на градусы и минуты, а промежуточные меридианы и параллели не приводятся. На практике штурман пользуется для каждого участка моря картой самого крупного масштаба.
Специальные навигационные карты предназначены так же, как и общенавигационные для графического решения задач судовождения и для удовлетворения специальных навигационных и других требований. Они представляют собой обычные навигационные или бланковые карты различных масштабов с нанесенной на них дополнительной нагрузкой содержания. Наиболее распространенные типы специальных карт: радионавигационные карты со специальными стадиметрическими, гиперболическими или азимутальными сетками, предназначенными для определения места судна с помощью радионавигационных систем, и навигационно-промысловые карты с подробной грунтовой характеристикой морского дна, предназначенные для обеспечения лова рыбы.
Справочные и вспомогательные карты включают карты различного содержания и назначения. Состав этой группы карт из-за многих причин не остается постоянным и время от времени меняется. Наиболее важными из справочны х карт являются карты рекомендованных путей, гидрометеорологических элементов (течения, приливы, льды и т. п.) и грунтов, радиомаяков и радиостанций, звездного неба, часовых поясов и др. Определенную ценность для мореплавания представляют гидрометеорологические карты, издаваемые для отдельных морей и частей океанов на каждый месяц. На таких картах приведены подробные сведения о течениях, ветрах, волнении и т. п.
Справочные карты, объединенные общностью содержания и назначения, часто сводятся в один общий атлас, например, Атлас приливо-отливных течений; Атлас течений для плавания в шхерах и т. д. Из вспомогательных карт наиболее распространенными являются карты-сетки для участков океанов и отдельных морей (не перекрываемых путевыми картами) без элементов специальной морской обстановки.
Масштабы карт
Степень уменьшения изображенных на карте размеров земной поверхности называется масштабом.
Масштаб карты определяется отношением длины расстояния между двумя точками на карте к действительному горизонтальному расстоянию между теми же точками на местности, причем оба расстояния должны быть выражены в одних и тех же единицах.
Существует несколько видов масштабов, основные из которых численный и линейный.
Численный масштаб представляет собой дробь, числитель которой единица, а знаменатель — число, показывающее, скольким единицам длины на местности равна одна единица длины на карте или плане. Если указано, что масштаб в данной точке карты равен
1 : 100 000, то это значит, что 1 см на карте в этом районе соответствует расстояние на местности, равное 100 000 см. Если знаменатель численного масштаба выражается большим числом, например 1 : 5 000 000, то такой масштаб называется мелким, если знаменатель численного масштаба выражается небольшим числом, например 1:10 000, то такой масштаб называют крупным. В зависимости от величины знаменателя масштаба морские карты условно подразделяются на мелкомасштабные и крупномасштабные.
Численный масштаб достаточно просто позволяет решить основную задачу: зная расстояние на карте, можно вычислить горизонтальное расстояние между этими же точками на местности.
Линейный масштаб представляет собой графическое или числовое соответствие числа крупных единиц на местности числу мелких на карте.
В первом случае линейный масштаб изображается прямой линией (на морских картах обычно его наносят на вертикальной рамке карты), разбитой на мелкие деления выбранной длины. На отметках делений надписывают числа крупных единиц длины, в которых измеряется расстояние на местности. Часто мелкие деления на карте в свою очередь делят еще на части для снятия более точных отсчетов.
При числовом задании линейного масштаба соответствие числа единиц на местности числу мелких единиц на карте определяется выражением, например, «2 мили в 1 см» или «3 км в 1 см».
Переход от численного масштаба к линейному осуществляется простым пересчетом мер длины. Чтобы перейти от численного масштаба к линейному, надо знаменатель численного масштаба разделить на 185 200 и полученный результат укажет количество миль и долей мили в 1 см.
Главный масштабна морских картах, выполненных в равноугольной цилиндрической проекции, — это масштаб той параллели, которая выбрана основной для всех картографических проекций данного района.
Предельная точность масштаба
Предельная точность масштаба — это наименьшее расстояние на местности, которое может быть измерено по карте.
Установлено, что люди с нормальным зрением в состоянии различать без увеличения предельную длину 0,2 мм — это укол ножки циркуля или тонко очинённого карандаша. Следовательно, эта величина и будет определять предельную точность масштаба любой карты.
Для определения предельной точности масштаба данной карты надо в знаменателе численного масштаба отделить запятой последние четыре цифры и удвоить полученное число. Ответ получается в метрах.
2.Компоновка, нумерация и оценка достоверности МНК. Подъем карт.
Карты коллекции ГУНиО
В СССР, а теперь в России, морские навигационные карты издаются ГУНиО МО РФ на листах размером75х100, 50х75, 38х50 см. в масштабе от 1:500 до 1:10000000. Нумерация навигационных карт производитсяпо схеме ABCDD, где: A - морской район, B - масштаб, C - море или часть морского района, DD - номеркарты в районе (увеличение нумерации по часовой стрелке начиная с севера). карты совместимые смеждународыми, имеют второй номер начинающийся с Int и выпускаются на двух языках - русском ианглийском. В основном использовались системы координат "Пулково 1942" и "Потсдам 1950", в настоящеевремя чаще используется система "WGS-84" Так же выпускаются: Специальные навигационные карты:Радионавигационные, Навигационнопромысловые, и т.п. Вспомогательные и справочные: Карты сетки безэлементов специальной морской остановки (для плавания в дали от берегов), карты районов боевойподготовки кораблей ВМФ, атласы течений и т.п. Для корректуры карт еженедельно выпускаются "ИзвещенияМореплавателям" С целью обеспечения безопасности плавания на судне должны быть в наличии требуемые карты и пособия для плавания, необходимый перечень которых устанавливается службой мореплавания судовладельца согласно типу судна, плану перевозок судна, закрепления его на той либо другой судоходной линии и всех возможных изменений районов плавания. При отсутствии на район плавания советских НМК нужных масштабов их дополняют иностранными картами.
Компоновка карт.
Карты и пособия для плавания, которые охватывают определенный географический район, называют комплектом. Эти комплекты, упрощают процесс заказа карт и справочников и ускоряют процедуру их подбора для будущего плавания, а также облегчают упорядочение их корректуры.
Комплекты карт и пособий для плавания, рекомендуемые службой мореплавания в список обязательных для судна, составляют судовую коллекцию, которая состоит из:
- навигационные морские карты — путевые, генеральные, частные и планы по районам плавания; НМК с масштабом 1:2 000 000 требуется иметь на борту на все возможные варианты плавания судна; РНК в случае, если на судне существуют соответствующие приемо-индикаторные устройства; НПК — используют лишь для промсудов или судов спецназначения; КВВП — масштаб 1:5 000— 1:100 000 — необходимы для обеспечения прохода по рекам и озерам, каналам и водохранилищам;
- вспомогательные (ВК), номограммы и справочные (СК) карты: карты-сетки, которые необходимы для обеспечения судовождения при плавании в открытых частях океанов и морей; карты РНС, которые содержат сведения о расположении и зонах действия РНС и точности определения места при их использовании; карты гидрометеорологических элементов для справок о течениях, волнениях, льдах, ветрах, приливах, туманах, об опасных гидрометеорологических явлениях и т. д.; шлюпочные карты,которые предназначенны для снабжения спасательных шлюпок судов первой и второй категорий, в соответствии с Правилами
Регистра СССР; в полный комплект таких карт входят шесть карт, по две карты на Атлантический, Тихий и Индийский океаны; карты для прокладки дуги большого круга, в гномонической проекции, также покрывающие все океаны;
- справочники и пособия для плавания: лоции, описания РТСНО, описания огней и знаков (огней), расписания передач гидрометеорологических и навигационных сообщений для моряков, расписание факсимильных радиопередач гидрометеорологических сведений; гидрометеорологические атласы и таблицы, правила плавания, а также различные справочные издания — Международные правила для предупреждения столкновений судов в море (МППСС—72), Сборник международных соглашений и законодательных актов СССР по вопросам мореплавания, Международный свод сигналов (МСС), Океанские пути мира, обязательные постановления по морским портам, Условные знаки для морских карт, Таблицы ширины территориальных вод и спецзон зарубежных государств, Таблицы расстояний, другие издания ГУНиО МО, ММФ, МРХ и Гидрометеоиздата, перечень которых устанавливает служба мореплавания для каждого типа судна в зависимости от района плавания; каталоги книг и карт;
- корректурные документы. С целью своевременного оповещения моряков о всех изменениях в навигационной обстановке существуют специальные навигационные пособия — так называемые корректурные документы, по которым обязательно производится немедленная корректура всех навигационных руководств и пособий, книг и карт.
Нумерация карт
В Российской Федерации действует система адмиралтейских пятизначных номеров морских навигационных карт. Адмиралтейский номер присваивается каждой морской карте. Ставится адмиралтейский номер в углу карты. Номер состоит из пяти цифр. Ниже приведены значения каждой из этих цифр.
Первая цифра означает Океан: 1-Северный Ледовитый океан, 2-Северная часть Атлантического океана, 3-Южная часть Атлантического океана, 4-Индийский океан, 5- Южная часть Тихого океана, 6-Северная часть Тихого океана.
Вторая цифра указывает на Масштаб карты: 0-Генеральная (более 1 000 000), 1-Промежуточная (500 000), 2-Путевая (200 000 - 400 000), 3 и 4 - Путевые крупномасштабные (100 000 - 150 000), 5 и 6 - Крупномасштабные частные (менее 75 000), 7-Резерв, 8 и 9 - Планы и карты внутренних водных путей.
Третья цифра для генеральных карт: 0-масштаб более 5 000 000, 1-масштаб более 2 000 000, 3- масштаб более 1 000 000. Для других карт - используется вместе с двумя последующими цифрами.
Четвёртая и пятая цифры указывают на номер карты в данном районе океана.
Оценка достоинства карты и степень доверия к ней
Степень доверия к каждой карте различна и зависит от нескольких причин.
1. От времени составления карты и производства описи. Чем позже составлена карта, тем большего доверия она заслуживает. Давность же работ указывает, что опись производилась приемами и инструментами менее совершенными, чем современные. Кроме того, карта могла со времени последней описи в какой-то степени утерять свое сходство с местностью (новые сооружения, вырубка леса, вынос рек и т. д.). Сведения о дате проведения описи наносят на каждой карте внизу, в правом углу под рамкой карты.
Даты первого и нового изданий, большой и малой корректуры указывают время внесения существенных изменений и дополнений на карту с целью ее обновления. Дата малой корректуры указывает о времени производства последних исправлений только навигационных элементов.
2. От масштаба карты. На картах в зависимости от масштаба дается определенное количество элементов морской обстановки, сокращающееся с уменьшением масштаба. Такое же сокращение сведений производится и в отношении ограждения, фарватеров, данных о магнитном склонении, течениях, навигационных ориентирах и т.д. Крупномасштабные карты всегда более нагружены, чем карты мелкомасштабные.
Граница района, охватываемого данной картой, называется нарезкой карты. Проектируя нарезку отдельной морской карты, стремятся изобразить на ней определенный район, а в зависимости от навигационной обстановки в районе устанавливается масштаб на степень нагрузки данной карты. Морские карты и планы обычно составляются в масштабе от 1 : 500 до 10 000 000.
Издаются морские навигационные карты на листах размерами 75 х100, 50 х 75, 38 х 50 см. Размеры внутренних рамок карт будут несколько меньше и составят соответственно 68 х 93, 43 х 68, 31 х 43 см. В исключительных случаях допускается увеличение листа, но не более чем это необходимо для размера 82 х 112 см внутренних рамок.
Если потребуется поместить заданный район в заданном масштабе на одной карте, то допускается ее изготовление на двух листах, из которых лист стандартного размера является основным, а другой, чаще всего неполный, называется клапаном. Клапан может быть размещен и на свободном листе карты (внутренний клапан) с некоторым находом на нее.
Судоводителю следует пользоваться всегда картой самого крупного масштаба.
3. От подробностей промера. Промер — это измерение глубин по ряду направлений (промерные галсы). Редкое и неровное расположение между собой отметок глубин на карте, наличие белых пятен между ними указывает на то, что промер не был подробным и поэтому в этихместах можно ожидать наличия невыявленных опасностей. И наоборот, если на карте часто и равномерно нанесены глубины, то это означает, что промерные работы произведены качественно и карта заслуживает высокого доверия.
4. От рельефа дна. Наиболее благоприятным для судовождения является плавный рельеф. Он характерен равномерным изменением глубин, отсутствием банок. Сложный рельеф характерен неравномерностью глубин, наличием банок, отличительных глубин и требует особой осторожности при плавании, так как в этом районе могут встретиться опасные глубины, не обнаруженные промером.
Характер рельефа дна приобретает особое значение во время плавания при малых глубинах, поэтому суда с большой осадкой (свыше 5 м) не должны заходить за 20-метровую изобату, а суда с малой осадкой — за 10-метровую. В случае захода судна за эти предостерегающие изобаты следует уменьшить ход и использовать все возможности для определения действительной глубины.
5. От достоверности изображения побережья. Если линия изображения побережья непрерывная и сплошная, то это говорит о том, что берег нанесен на карту по материалам точных съемок. Прерывистая береговая линия показывает на карте места, где берег нанесен лишь приближенно, по данным съемок пониженной точности.
Достоверность изображения рельефа суши определяется способом его нанесения на карту. Если горы и иные неровности на местности изображены на карте непрерывными горизонталями, каждая из которых соответствует определенной высотной ступени, то данные карты представляют собой наиболее точное изображение рельефа суши.
6. От количества нанесенных на карту береговых ориентиров.
При отсутствии по побережью приметных с моря береговых ориентиров достоинство карты значительно снижается, ибо затрудняется использование ее для определения места судна. При достаточном количестве береговых ориентиров следует использовать прежде всего триангуляционные знаки и объекты, обведенные на карте красными кружками. Затем предпочтение отдается изображению башен, вышек и церквей, которые наносят на карту по достаточно точно определенным координатам.
Практика судовождения выработала ряд основных рекомендаций по использованию карт:
- из всех имеемых карт для данного района следует использовать всегда карту самого крупного масштаба, составленную по самым последним данным;
- если белые пятна расположены среди больших глубин, можно ожидать, что и в этом непромеренном пятне глубины окажутся достаточными. Если белые пятна расположены среди малых глубин, то следует опасаться появления в этом месте опасной глубины;
- если сведения, приведенные в лоции и на карте, имеют расхождения, то следует принимать во внимание сведения, помещенные на карте самого крупного масштаба;
- заходить за изобату 20 м не рекомендуется;
- перед тем как пользоваться картой, необходимо внимательно прочитать все надписи на ней;
- при подготовке к рейсу необходимо произвести подъем карты.
Подъем карты
Подъем карты производится следующим образом.
Наносят карандашом отрезки дуг дальности видимости маяков с учетом высоты глаза наблюдателя, на которых надписывают характеристику огня маяков. Опасные секторы маяков заштриховывают карандашом. На некоторых иностранных картах такие дуги для стандартной высоты глаза наблюдателя наносят уже при печати.
Отмечают карандашом те изобаты, которые судоводитель не намерен пересекать.
Наносят опасный угол, опасный пеленг, опасную дистанцию, ограждающую опасности. На них делают соответствующие пояснительные надписи.
Отмечают кружком искусственные створы, которые могут быть использованы во время плавания. Если нет искусственных, то намечают, если это возможно, и проводят естественные, сопровождая их соответствующими надписями.
Выделяют карандашом на карте те участки береговой черты и береговые приметные ориентиры, которые хорошо просматриваются на экране РЛС. Однако это следует делать только в результате неоднократных наблюдений.
Возле радиомаяков выписывают их характеристику, дальность и время работы; ненадежные секторы помечают карандашом.
Намечают карандашом опасные для плавания районы, проходящие вблизи с проложенной линией пути.
Отмечают на карте карандашом направление и скорость постоянных течений.
При наличии в данном районе приливных течений на свободной поверхности карты составляют табличку с основными элементами прилива на ориентировочное время прихода в этот район.
При плавании в узкостях с большим количеством плавучего ограждения выписывают характеристику имеющихся буев.
Магнитные склонения приводят к году плавания и подписывают на картах.
3.Задачи, решаемые на МНК
Задача 1.
Снять с карты координаты заданной точки. Поставив одну ножку циркуля в заданную точку, другую ножку отодвинуть до тех пор, пока она не коснется (при описании дуги) ближайшей, нанесенной на карте, параллели. Сняв таким образом расстояние до ближайшей параллели, перенести циркуль без изменения раствора его ножек к ближайшей боковой (правой или левой) рамке карты. Одну ножку поставить на параллель, до которой измерено расстояние, другую направить по рамке в сторону параллели заданной точки и у острия иголки этой ножки циркуля снять по рамке отсчет широты с точностью до 0,1 наименьшего деления, нанесенного на рамке карты. Аналогично определяется и долгота точки, с той лишь разницей, что берется расстояние от заданной точки до ближайшего к ней меридиана, а затем циркуль приставляется к верхней или нижней рамке карты, с которой и снимается значение долготы заданной точки.
Задача 2.
Нанести точку на карту по заданным координатам. Эта задача обратная первой и может решаться двумя способами.
Приложив на карте параллельную линейку к ближайшей параллели и подведя ее к заданной широте (отметка на рамке делается карандашом заранее), карандашом в районе заданной долготы вдоль среза линейки проводится тонкая линия. Затем, приложив линейку к ближайшему от заданной долготы меридиану, подвести ее к отметке заданной долготы на верхней (нижней) рамке карты и прочертить карандашом отрезок тонкой линии до пересечения с первой линией. Пересечение двух нанесенных линий на карте является искомой точкой.
Приложив параллельную линейку к параллели, ближайшей к заданной широте, подвести ее до заданной широты. Затем раствором циркуля, равным расстоянию от значения заданной долготы до ближайшего меридиана, снятого с горизонтальной рамки, делается укол по срезу линейки от того же меридиана в сторону заданной долготы. Точка, отмеченная уколом циркуля, является искомой.
Задача 3.
Измерить расстояние между двумя точками на карте. Если расстояние можно взять одним раствором циркуля, то одна ножка циркуля прикладывается к начальной точке, другая к конечной. Затем, не допуская изменения раствора циркуля, приставить циркуль к вертикальной (боковой правой или левой) рамке карты в широте, где лежат точки, между которыми измеряется расстояние, и снять количество минут, с точностью до 0,1. Например, по вертикальной рамке раствору циркуля соответствует 12',3, это означает, что расстояние между точками составляет 12,3 мили (12 миль и 3 кабельтова). Если одним раствором циркуля нельзя охватить всего расстояния между точками, то его следует разбить на части и каждую часть измерить отдельно, приставляя циркуль к вертикальной рамке карты в районе широты, которая соответствует измеренной части. Затем измеренные расстояния частей складываются для получения искомого расстояния между точками.
Задача 4.
Проложить от заданной точки истинное направление. Приложив транспортир совместно с параллельной линейкой на карту дугой вверх так, чтобы центральная риска транспортира совпала с ближайшим к заданной точке меридианом, следует повернуть транспортир и линейку вправо или влево до совпадения того же меридиана со штрихом на дуге транспортира, соответствующим заданному направлению. Затем необходимо убрать транспортир, а линейку раздвинуть до заданной точки и провести от нее карандашом прямую линию в надлежащем направлении.
Задача 5.
Определить направление проложенной на карте линии. К проложенному направлению на карте прикладывается параллельная линейка и к ней приставляется транспортир. Затем, перемещая транспортир вдоль линейки, необходимо добиться совпадения его центральной риски с одним из меридианов на карте. Деление транспортира на дуге, через которое проходит тот же меридиан, указывает истинное направление. При этом, если заданное направление составляет острый угол с северной частью меридиана, то ему соответствует верхний отсчет на дуге транспортира, если тупой, - то нижний.
Задача 6.
Отложить от данной точки по заданному направлению известное расстояние. Проложив от точки указанное направление (задача 4), необходимо взять циркулем с вертикальной рамки в соответствующей широте заданное расстояние и отложить его на проложенной линии. При снятии расстояний между двумя точками следует придерживаться правил, указанных в задаче 3.
Задача 7.
Перенести данную точку с одной карты на другую.
Снять с одной карты широту и долготу (задача 1) и по полученным координатам нанести эту точки на другую карту (задача 2).
Снять с одной карты направление на заданную точку и измерив расстояние до нее от изображенного на карте какого-либо приметного ориентира (маяк, знак, мыс и т.п.), имеющегося на обеих картах, провести на второй карте от этой точки снятое направление и отложить по нему в масштабе второй карты измеренное расстояние.
От умения и навыков решать указанные задачи на карте зависит правильное ведение навигационной прокладки, нанесение обсервованных точек и осуществление других графических построений. Поэтому судоводителю, управляющему судном в морских районах с использованием навигационных карт, необходимо путем тренировок добиться безукоризненного решения задач, связанных с графическими построениями, снятием и нанесением географических координат, расстояний и истинных направлений на морской карте.
4.Прокладочный инструмент
Безопасность кораблевождения зависит прежде всего от точности счисления пути и определения места корабля по обсервациям и, кроме того, соблюдения правил хорошей морской практики. Все обстоятельства кораблевождения заносят в навигационный (судовой) журнал - основной документ, отражающий всю деятельность корабля. При этом все записи, относящиеся к счислению и обсервациям, записывают достаточно подробно, чтобы по ним можно было восстановить на карте всю прокладку. Графические построения на карте, связанные с нанесением и снятием различных направлений (линий пеленгов и курсов), измерением и откладыванием расстояний, называются прокладкой. Для осуществления прокладки вручную служит так называемый прокладочный инструмент, к которому относятся параллельная линейка, транспортир и циркуль - измеритель.
Транспортир служит для измерения и прокладки на карте различных направлений. Он выглядит в виде полуокружности с риской (штрихом) в центре. Особенность штурманского транспортира в том, что он имеет два ряда цифр под шкалой, что сделано для удобства отсчетов направлений от 0 до 360°. Параллельная линейка предназначена для перенесения на карте в другое место направлений, измеренных транспортиром или снятых линейкой. Линейка состоит из двух параллельных друг другу планок А и В, связанных между собой перемычками, поворачивающимися на шарнирах. При поочередном передвижении планок в одну и ту же строну на карте линейка сохраняет свое направление относительно меридиана. На судах иногда применяют параллельные линейки Фильда, совмещающие функции линейки и транспортира.
Циркуль представляет собой обычный чертежный измеритель со вставными иглами в ножках.
На кораблях применяют также протрактор, служащий для построения двух углов с общей стороной между ними. Он представляет собой лимб (градуированный круг) 1 с тремя линейками в виде лучей, исходящих из его центра. Средняя линейка 2, один из срезов которой проходит через нулевое деление лимба, неподвижна, крайние 3 и 4 могут поворачиваться относительно нуля одна вправо, другая влево под заданными углами. Линейки вращаются вокруг цилиндрика 5 с донышком в виде полукружка с риской в центре для отметки вершины заданных углов на карте.
5.Особенности английских морских карт.
Карты Британской коллекции
Коллекция Британского Адмиралтейства не подвержена экономическим или политическим рискам. Картыудобны в использовании и корректуре (выпускаются кальки).Карты имеют префикс BA и номер от 1 до 4999,например BA2246 или BA34. Также может существовать префикс AUS, если карта является перепечаткойавстралийской карты или NZ – новозеландской карты.
Контрольные вопросы:
1. Морские навигационные карты делятся на?
2. Предназначение путевых карт?
3. Перечислить основные задачи решаемые на МНК?
4. Масштаб карты –это?
5. Что входит в состав прокладочного инструмента?
6. Нумерация карт?
7.Предельная точность масштаба- это?
Просмотр содержимого документа
«Лекция Т.1.6.»
Тема 1.6. Электронные картографические системы.
План лекции №8
1.Основные понятия и определения.
2.Виды электронных карт.
3. Характеристика основных режимов работы ЭКНИС.
Цель занятия:
Знать:
-назначение, классификацию и компоновку навигационных карт;
- электронные навигационные карты;
- судовую коллекцию карт и пособий, их корректуру и учет.
Уметь:
- свободно читать навигационные карты.
1.Основные понятия и определения
Вершиной современных навигационных и компьютерных технологий стало создание электронного справочника современного судна – электронной картографической навигационной информационной системы ЭКНИС (ECDIS – Electronic Chart Display and Information System). ЭКНИС осуществляет отображение карт и места судна, позволяет вести прокладку трассы движения и осуществлять контроль отклонений от заданного маршрута, осуществляет вычисление безопасных курсов, предупреждение судоводителя об опасности, ведение судового журнала, управление авторулевым и т.п.
ЭКНИС являются исключительно эффективным средством информации в навигации, существенно сокращающим нагрузку на вахтенного помощника и позволяющим уделять максимум времени наблюдению за окружающей обстановкой и выработке обоснованных решений по управлению судном.
Все многообразие существующих электронных картографических систем принято делить на три группы:
ECDIS - электронные картографические навигационные информационные системы;
ECS - электронные картографические системы;
RCDS - растровые картографические дисплейные системы.
Международной морской организацией официально признаются только ECDIS. Имеется в виду, что с юридической точки зрения ECDIS является эквивалентом современных бумажных навигационных карт в рамках требований Правила V/20 Конвенции SOLAS. Информационный характер ECDIS означает её способность предоставлять судоводителю по его запросу характеристики и параметры картографических объектов, таких, как ориентиры, опасности, опасные изобаты, запретные и ограниченные для плавания районы, а также данные об условиях плавания по всему маршруту следования судна и т. п.
Навигационный характер определяется как традиционными задачами ECDIS (предварительная и исполнительная прокладка, коррекция текущего места), так и новыми задачами по оценке навигационной безопасности плавания, корректуре электронных карт, организации подачи заблаговременной сигнализации и т. п.
ECDIS отображает на экране дисплея точные картографические данные морской карты в реальном времени, т. е. в сочетании с текущим местом судна, полученным от DGPS, GPS. Система обрабатывает и представляет информацию и от других навигационных датчиков, например гирокомпаса, лага, эхолота, РЛС, САРП. На рисунке показаны основные элементы ECDIS.
Основные элементы ECDIS

Электронные картографические навигационные информационные системы предназначены для решения следующих навигационных задач:
- вывод данных от приемоиндикаторов местоположения судна, а также лага и гирокомпаса на электронную карту и непрерывное ведение исполнительной прокладки;
- запись траектории пройденного пути;
- ведение электронного судового журнала и вывод его данных на печать;
- восстановление отображения траектории пути судна и записей судового журнала любого рейса;
- составление предварительной электронной прокладки предстоящего рейса с проведением расчетов скорости, расстояний, времени плавания;
- избирательное управление составом отображаемой картографической информации;
- слежение за исполнительной электронной прокладкой и параметрами движения судна по маршруту;
- измерение географических координат, дистанций и пеленгов любых объектов карты;
- сигнализация о приближении к путевой поворотной точке, отклонениях от установленных параметров движения судна и неисправностях самой системы;
- отображение карты в удобном масштабе (масштабирование) и врезка электронной карты;
- отображение электронной карты в режимах ориентации «Север вверху» и «Курс вверху»;
- получение дополнительной справочной информации о картографических объектах, средствах навигационного оборудования, а также гидрографических и других сведений из базы данных электронной карты;
- возможность слежения за изменением местоположения захваченных неподвижных объектов относительно движения собственного судна;
- вывод на экран изображения карт в различных форматах, в том числе стандарте ECDIS, утвержденном IMO;
- автоматическая, полуавтоматическая и ручная корректура электронных карт;
- подбор цвета экрана в зависимости от освещенности помещения рубки;
- мгновенная запись местоположения судна (человек за бортом);
- отображение на электронной карте целей, захваченных на САРП/РЛС;
- запись (архивация) траекторий целей на диск и возможность их отображения вместе с соответствующей траекторией собственного судна и записями судового журнала.
2.Виды электронных карт
В общем плане под электронной картой - ЭК (electronicchart -ЕС) - понимается изображение определенного района Земли в условном виде на экране дисплея или набор данных для построения этого изображения.
Классификация электронных карт
При рассмотрении вопросов использования ЭК применяется их классификация по различным признакам.
В зависимости от полноты информации, представляемой на карте, ЭК разделяют на полномерные и упрощенные (стилизованные).
По нагрузке полномерные навигационные ЭК равноценны официальным бумажным навигационным картам и содержат всю картографическую информацию, необходимую для безопасного и эффективного судовождения.
Нагрузка упрощенных электронных карт недостаточна для целей безопасного плавания. Для использования полномерных карт требуются обладающие широкими возможностями средства хранения и отображения информации, которыми ряд автоматизированных навигационных систем не обладает. В таких системах могут использоваться ЭК в упрощенном виде, который позволяет реализовывать имеемая аппаратура. Схематическое изображение на экране дисплея местности в определенной проекции, не эквивалентное бумажной навигационной карте и не удовлетворяющее требованиям к безопасности мореплавания, обычно называется упрощенной (стилизованной) электронной картой.
Упрощенные ЭК получаются самыми разными способами. Для ввода с бумажных карт в память ЭВМ данных для стилизованных карт в ряде автоматизированных навигационных систем используются специальные кодирующие планшеты - дигитайзеры (chartdigitizer).
В зависимости от метода цифрового представления информации карты ЭК делят на растровые и векторные.
В растровых картах (Rastrelectronicnavigationalchart - RNC) используется метод цифрового представления изображения карты в виде матрицы точек (пикселей). При таком представлении карты сведений об отдельных картографических объектах в памяти нет. Исходной для получения данных растровых карт служит информация официальных бумажных карт. Растровые карты получаются сканированием основы и раздельно цветного изображения бумажных карт. За основу растровых ЭК приняты печатные платы для обычных бумажных карт. Снятая с основы карта является копией бумажной. Сканерная технология производства растровых карт обеспечила в начале 90-х годов быстрое производство мировой коллекции этих карт.
В векторных ЭК (Vectorelectronicnavigationalchart -VENC) применяется метод цифрового представления элементов карты с помощью точек, линий, контуров, заданных своими координатами и соответствующим кодом. При таком методе представления информация карты хранится в памяти в виде последовательности записей, характеризующих каждый имеемый на карте картографический объект. Картографическим объектом (КО) называется реальный объект или явление, изображаемое на карте в условном виде; или описание или группа описаний картографических характеристик реального объекта или явления в цифровом виде для отображения его на ЭК.
Все объекты векторной электронной карты обычно распределяются по определенным тематическим уровням, называемых слоями карты. Такими слоями, например, могут быть: навигационные средства, глубины, качество данных, характеристики и т.д. Разделение нагрузки карты на слои позволяет системе, отображающей ЭК, управлять видимостью этих слоев.
Количество информационных слоев векторной ЭК может быть различным. Требуется их иметь, по крайней мере, три: базовая информация, дополнение базовой информации до стандартной, вся другая информация.
Выделение таких слоев позволяет определить три вида нагрузки карты: базовую, стандартную и полную.
Базовая нагрузка - означает уровень информации карты, который не может быть удален с дисплея. Она содержит информацию, которая требуется всегда, во всех географических районах и при любых обстоятельствах. Это не означает, что ее достаточно для безопасного судовождения. Базовая нагрузка включает: береговую черту (для полной воды); выбранную капитаном для собственного судна безопасную изобату; в ограниченной безопасной изобатой области отдельные подводные опасности с глубинами, меньшими безопасной; в пределах этой же области отдельные опасности, такие как мосты, линии электропередачи, включая буи и знаки, которые используются или не используются как средства навигации; системы движения; масштаб; вид ориентации карты и режим дисплея; единицы глубин и высот.
Стандартная нагрузка - это минимальный набор данных, обеспечивающих безопасность при прокладке и планировании пути. Стандартная нагрузка включает базовую, а также линии осыхания, стационарные и плавучие средства навигации, границы фарватеров, каналов, приметные визуальные и радиолокационные объекты, запретные и ограниченные районы, и некоторые другие сведения.
Полная нагрузка состоит из стандартной и всей другой информации. Вся другая информация включает: значения глубин, подводные кабели и трубопроводы, маршруты паромов, детали всех отдельных опасностей, детали навигационных средств, содержание предупреждений мореплавателям, дату издания ЭК, горизонтальный геодезический датум, ноль глубин, магнитное склонение, географические названия и т.д.
Изображение векторной карты получается путем преобразования цифровых данных картографических объектов в графическое изображение карты. Построение элементов карты производится с помощью точек, прямых линий (векторов), ломаных линий и контуров по координатам точек, представляющих метрику картографических объектов.
Векторные ЭК до недавнего времени создавались в основном путем съема их цифровых данных с бумажных карт с помощью дигитайзерных технологий. В этих технологиях значительное место занимает ручной труд, что приводило к существенным затратам времени на производство векторных карт. В результате долгое время не было полной коллекции векторных карт на весь Мировой океан. В настоящее время для производства векторных карт созданы современные автоматические сканерные технологии, выполняющие «векторизацию» бумажной карты в требуемом формате и контроль качества получаемых данных. В результате скорость создания векторных электронных карт значительно увеличилась.
Кроме официальных бумажных карт, исходной информацией для образования данных векторных ЭК могут служить непосредственно данные геодезической съемки местности, а также результаты аэро и космической фотометрической съемки районов Земли. Это имеет большое значение по следующим причинам:
• Обеспечивается более высокая точность данных карты, так как исходные данные свободны от погрешностей графического их представления на бумажной карте.
• Электронные карты могут создаваться по результатам новых высокоточных съемок местности, не ожидая, когда будут получены по этим результатам бумажные карты.
Дело в том, что съемка многих районов Земли выполнена давно и ее точность не отвечает современным требованиям. Это обстоятельство снижает эффективность спутниковых навигационных систем GPS и ГЛОНАСС и, соответственно, систем с ЭК. Поэтому в настоящее время производятся обширные работы по уточнению положения картографических объектов в системе WGS84 для многих районов Земли. Эта работа рассчитана на несколько лет. Получаемые при выполнении этой работы результаты могут непосредственно использоваться для создания новых высокоточных ЭК.
В зависимости от юридического статуса ЭК подразделяются на официальные и неофициальные карты.Официальными считаются ЭК, выпускаемые государственными гидрографическими организациями. Все другие ЭК относятся к неофициальным картам. Официальные векторные карты, например, создаются Главным управлением навигации и океанографии (ГУНиО) России. Официальные растровые электронные карты (RNC) производятся, например, специальной службой Британского Адмиралтейства (ARCS -AdmiraltyRasterChartStrvice), гидрографической службой США (NOAA - NationalOceanicandAtmosphericAdministration).
В зависимости от вида навигационной системы, в которой ЭК представляются, электронные карты делятся наecdis-карты и ecs-карты. Ecdis-карты - это официальные векторные электронные навигационные карты, данные которых стандартизованны по содержанию, структуре, действующему формату обмена картографической информацией и полностью удовлетворяют специальным требованиям ИМО и МГО. Они выпускаются для использования с ECDIS. Ecdis -карты в документах ИМО названы Electronicnavigationalcharts - ENC.
В основу использования ecdis-карт в судовождении положены следующие принципы:
• Точность и полнота ЭК должна быть не ниже бумажных навигационных карт;
• Данные карты и корректуры к ней должны быть представлены в официально принятых ШО стандартных форматах;
• Государственные гидрографические службы должны нести полную ответственность за содержание ЭК и корректур к ним;
• Данные карт и официальных корректур должны храниться в памяти системы в неизменяемом виде;
• Размножение, регистрация и распространение ЭК должны соответствовать международным правилам распространения программного обеспечения.
К Ecs-картам относятся: растровые карты, упрощенные ЭК, выпускаемые частными фирмами полномерные векторные ЭК, векторные карты в отличном от действующего формате.
Классификация ЭК в зависимости от масштаба. Как известно, подробность нагрузки карт зависит от их масштаба. Масштаб электронной карты, которому соответствует ее нагрузка, называется оригинальным масштабом ЭК.
В зависимости от оригинального масштаба ЭК делятся на:
• карту мира (World) - 1:2500001 и меньше;
• генеральные карты (General) - 1:300001 - 1:2500000;
• прибрежные карты (Coastal) - 1:80001 - 1:300000;
• подходные карты (Approach)- 1:40001 - 1:80000;
• гавани (Harbour)-1:10001-1:40000;
• планы (Plan) -1:10000 и крупнее. Отметим, что традиционно бумажные отечественные навигационные морские карты в зависимости от масштаба подразделяются на следующие виды:
• генеральные - 1:1000000 - 1:5000000;
• путевые - 1:100000 - 1:500000;
• частные - 1:25000 - 1:50000;
• планы - 1:25000 и крупнее.
Классификация ЭК в зависимости от использования в навигационной системе. Среди векторных карт различают основные и системные карты.
Основной называют карту, данные которой размещены в отдельном файле, поставляемом государственной или частной организацией. Данные основной карты не могут быть изменены на судне.
Системная электронная карта (Systemelectronicnavigationalchart - SENC) - это набор данных для отображения откорректированной навигационной карты, представленный во внутреннем формате системы. Он является результатом преобразования системой информации основной ЭК с учетом корректур и данных, добавленных мореплавателем. Это тот набор данных, который составляет дисплейный файл системы для отображения откорректированной навигационной карты и выполнения с ее помощью навигационных функций. SENC может содержать информацию и от дополнительных источников.
Корректура электронных карт
Для поддержания ЭК на уровне современности предусмотрены операции по их обновлению (корректуре). Как известно, различают корректуры официальные, источником которых являются гидрографические службы; и местные, поступающие от авторитетных местных служб (береговой охраны, лоцманской службы и т.д.). Официальные корректуры могут быть следующими: локальные постоянные или временные (с указанием срока действия), корректуры для добавления, удаления, замещения КО или их атрибутов; пространственные корректуры для полной замены одной или нескольких карт. Вопросы корректуры ЭК рассмотрены в Приложении 1 S-52: «ReportoftheIHO (СОЕ) WorkingGrouponUpdatingtheElectronicChart» 1st Edition, June 1990.(«Отчет рабочей группы МГО по корректуре электронных карт»).
При организации корректуры электронных карт, руководствовались следующими положениями:
- обновлению (Update) должна подвергаться системная ЭК, данные основной электронной карты следует сохранять в неизменном виде;
- корректуры должны быть стандартизованы по структуре, системе классификации и кодирования; формат передачи данных должен соответствовать формату S-57, v.3;
- обновление ЭК должно включать использование не только постоянных, временных и предварительных Извещений мореплавателям, но также относящихся к карте навигационных и метеорологических предупреждений Navarea и Navtex;
- текстовую часть информации по корректуре ЭК необходимо подготавливать на английском языке;
- вносимая корректура не должна ухудшать электронную карту;
- сведения о внесенной корректуре следует сохранять в памяти системы и отображать по запросу оператора;
- ответственность национальных гидрографических организаций за корректуры должна быть эквивалентной той ответственности, которую они несут по корректуре бумажных навигационных карт.
Все методы корректуры ЭК разделяются на три группы:
- ручная;
- полуавтоматическая;
- автоматическая.
Ручное обновление ЭК предполагает ввод корректурных данных оператором с пульта с использованием специальных программных средств, облегчающих выполнение этой задачи.
При полуавтоматической корректуре действия оператора ограничиваются установкой носителя корректурной информации (дискеты, оптического диска) в считывающее устройство. Автоматическая корректура не требует вмешательства оператора при приеме и записи в память корректурных данных. Она осуществляется по каналам мобильной или спутниковой связи. Для ее передачи используется обычно электронная почта всемирной компьютерной сети Интернет.
При ручной корректуре требуется только, чтобы корректурная информация была понятна оператору. Информация по корректуре в этом случае может печататься в традиционном для ИМ виде. При ручной корректуре ввод данных производится оператором с помощью специального языка, в котором определен формат ввода и операции корректур. Набор таких операций может включать в себя: перенос КО; редактирование характеристик КО; удаление КО либо его характеристики; включение КО либо его характеристики; переименование объектов.
Полуавтоматический способ корректуры ЭК применяется, когда судовой компьютер не имеет адреса электронной почты, или имеет его, но выход на этот адрес затруднен. В этом случае используется два пути доставки Извещений мореплавателям. В первом корректурная информация в форматированном виде поставляется по почте на дискетах (дисках) в порты, какие укажет судоводитель. Во втором случае эта информация доставляется через судового агента в порту. Перед заходом в порт судоводитель формирует запрос на получение Извещений мореплавателям и записывает его на дискету. С приходом в порт эта дискета передается судовому агенту. Судовой агент со своего офисного компьютера отправляет полученный запрос, используя электронную почту. Обычно время обработки запроса организацией, поставляющей электронные Извещения, не превышает трех часов. Получив ответ, агент записывает его на дискету и передает на судно. На судне корректурная информация с дискеты загружается в базу данных системы с ЭК.
Наиболее целесообразным режимом обновления ЭК считается автоматическая корректура. В этом случае пользователь должен быть подключен к электронной почте и оборудован современными средствами телекоммуникации: спутниковой или мобильной связью. Корректурная информация в форматированном виде направляется гидрографической организацией по электронному адресу судна. Получение корректурной информации происходит автоматически после проверки содержимого почтового ящика. При подключении берегового телефона на стоянке в порту появляется также возможность получения корректурной информации через E-mail по телефонной линии.
При вводе корректур должны применяться методы защиты и контроля целостности получаемой информации. Принимаемая корректурная информация должна регистрироваться. Система должна сообщать оператору о полученной корректурной информации, а также о номерах пропущенных извещений.
Обычно гидрографическая организация, поставляющая электронные Извещения мореплавателям по электронной почте, предоставляет два вида услуг.
Первый вид услуг - регулярная доставка еженедельных выпусков. Судоводитель должен подписаться на предоставление ему такой услуги. После этого гидрографическая организация регулярно по электронному адресу судна будет пересылать форматированные извещения мореплавателям, которые автоматически загружаются в память навигационно-информационной системы.
Второй вид услуг - это отсылка корректурной информации по запросам клиентов. Возможны случаи, когда по той или иной причине еженедельный выпуск извещений не доходит до потребителя и требуется его повторная отправка. Кроме этого, может быть ситуация, что пользователь не подписался на еженедельные выпуски ИМ, но желает получить некоторые из них или только часть еженедельного выпуска ИМ, относящуюся к району его плавания. Для таких ситуаций предусматривается отсылка информации по запросам клиентов на получение или повторную доставку еженедельного выпуска, или только некоторых ИМ, относящихся к перечисленным в запросе клиентов публикациям и номерам карт. Отсылаемые форматированные сообщения автоматически загружаются в память системы.
3. Характеристика основных режимов работы ЭКНИС
ИМО также приняла добавления к рабочим стандартам для системы ЭКНИС с целью включения использования дисплейных систем растровых карт(РКДС).
Эти добавления позволяют оборудованию системы ЭКНИС работать в двух режимах:
Режим ЭКНИС с использованием данных ЭНК
Режим РКДС, когда эти данные не доступны.
Однако режим РКДС не обеспечивает всех функций системы ЭКНИС и может использоваться только совместно с «соответствующим» комплектом откорректированных бумажных карт.
Навигационно-информационные системы ECDIS предоставляют судоводителю широкий набор функций для работы с картами, для планирования пути, счисления и обсерваций, для контроля прохождения маршрута, навигационной безопасности и т. д. Набор функций ECDIS зависит от конфигурации АКС, созданной на основе ECDIS, и назначения судна, на котором АКС устанавливается. В обобщенном варианте возможные функции ECDIS описаны ниже.
1. Работа с каталогом карт и с картами.
Навигационно-информационная компьютерная система может быть снабжена электронным каталогом карт и книг. В этом случае она обеспечивает просмотр записей о картах и пособиях, имеемых в каталоге, поиск нужных карт и пособий, подбор карт и пособий на переход, загрузку в каталог и регистрацию новых карт и пособий, составление пользовательской коллекции карт и выполнение других функций.
В ECDIS реализуются различные виды загрузки карт для отображения на экране: по номеру, из списка, по позиции судна, путем использования электронного каталога карт, путем формирования конкретного запроса и т. д. Имеется возможность автоматического подбора и загрузки карт. Во время движения судна ECDIS автоматически подбирает и отображает на экране наиболее подробную карту, покрывающую позицию судна. Смена ЭК также может производиться автоматически в соответствии со списком путевых карт, подобранных на переход. При выходе судна из зоны карты, происходит автоматическая загрузка следующей карты.
В зависимости от текущей навигационной задачи ECDIS позволяет обеспечивать выбор различной ориентации карты (по норду или по курсу) и масштаба ее отображения. При изменении масштаба карты размер надписей и символов карты не изменяется, обеспечивая их хорошую разборчивость при любом выбранном масштабе.
В ECDIS также имеется функция «электронной лупы», с помощью которой любой выделенный оператором фрагмент карты может быть вырезан и увеличен на весь экран.
Операция просмотра карты в ECDIS позволяет просматривать все районы текущей карты и любой другой карты.
Важным достоинством ECDIS является функция селекции картографической информации. Она дает возможность установки уровня нагрузки карты (обычно используется один из трех уровней информационной плотности: базовый - Basic, стандартный - Standard, и полный - Full); избирательного вывода или выделения отдельных видов данных: навигационного ограждения, маяков, затонувших судов, изобат и ряда других картографических объектов.
В ECDIS реализовано отображение карты в режиме истинного или относительного движения. В режиме истинного движения при исполнительной прокладке обеспечивается автоматический сдвиг карты при подходе судна к границе экрана, чтобы судно все время находилось в поле отображения дисплея. В режиме относительного движения судно находится в центре экрана, а карта "плывет" относительно него.
Имеется функция для перемещения карты внутри окна высвечивания по команде судоводителя. Она применяется, когда при прокладке требуется увеличить обзор района по ходу судна или с какой-то его стороны.
Для разных условий освещенности в ECDIS обеспечивается выбор подходящей цветовой палитры изображения карты, не требующей времени на изменение адаптации зрения при наблюдении за окружающей обстановкой и при работе с ЭК. Например, для работы с картой ночью можно воспользоваться специальными "ночными" палитрами, обеспечивающими отчетливое восприятие навигационной ситуации в условиях пониженного освещения.
Следует также заметить, что бумажная карта и SEN С являются различными способами представления навигационно-гидрографической информации. Бумажная карта - это собственно носитель информации, состав которой не может измениться. Электронная карта - результат визуализации определенной части данных ЭК, хранимых в памяти. Состав информации на отображаемой электронной карте пользователь может оптимизировать применительно к условиям плавания.
2. Планирование пути.
В ECDIS возможно планирование двух маршрутов, основного и альтернативного.
При планировании пути ECDIS обеспечивает выбор требуемого маршрута из списка маршрутов, имеемых в базе данных, и возможность корректировки его.
Имеются функции для планирования и занесения в память новых маршрутов. При таком планировании обеспечивается возможность задания элементов и параметров нового маршрута, путевых точек, типа отрезков пути (локсодромия или ортодромия), скорости следования по отрезкам маршрута, времени прибытия в точки изменения курса, границ отклонения от маршрута, радиусов поворотов, номеров генеральных и путевых карт. которые будут использоваться на переходе. Плавание на отрезках пути в основном планируется по локсодромии. В этом случае на картах в проекции Меркатора маршрут представляется в виде прямолинейных отрезков,
Операции прокладки маршрута по ортодромии позволяют в ECDIS планировать переход между двумя точками на поверхности Земли по кратчайшему расстоянию. Этот метод является предпочтительным, когда протяженность отрезка пути велика (переход через океан). ECDIS дает возможность рассчитать выигрыш плавания по ортодромии по сравнению с локсодромией, осуществить прокладку маршрута по ортодромии, представляя ее отрезками локсодромий через заданный шаг разности долгот или расстояния; или заменяя ортодромию отрезками локсодромий, при переходе с которых на следующий отрезок курс меняется на одинаковую величину, например, на 5°.
Ряд ECDIS предоставляют судоводителю функцию построения маршрутов по данным прошлых рейсов, т. е. возможность автоматического преобразования записанной в электронный судовой журнал информации о движении судна в маршрут.
Новые маршруты могут быть записаны в базу данных маршрутов. Запись маршрута в базе данных обычно включает его номер, название, координаты путевых точек, значения допустимых отклонений от маршрута, перечень генеральных карт, перечень путевых карт.
Кроме того, при планировании пути ECDIS предоставляет функции:
• цифрового ввода и корректировки параметров маршрута
координат поворотных точек, скорости на отрезках маршрута, времени прибытия в поворотные точки, значения безопасной глубины, а также расчета по опорным значениям всех интересующих судоводителя элементов маршрута;
• отображения выбранного маршрута на ЭК для зрительной оценки с предоставлением возможности графического редактирования положения поворотных точек с помощью курсора. При этом могут использоваться операции добавления, вставки, смещения поворотных точек и изменения их последовательности;
• тестирования безопасности маршрута. Эта функция позволяет судоводителю протестировать запланированный маршрут на навигационные препятствия, опасные области глубин, районы с особыми условиями плавания;
• инверсирования маршрутов (т. е. рассмотрения маршрута в обратном направлении);
• подключения программ имитации маневров для включения в маршрут участков изменения режима хода и поворотов с одного отрезка маршрута на другой;
• печати опорных и расчетных данных выбранного маршрута, а также перечня карт на переход;
• свободного выбора любой точки на линии намеченного маршрута для расчета дистанции и времени следования до любой следующей точки на линии пути;
• пересчета координат поворотных точек на другой геодезический датум.
Большое значение для предварительной прокладки имеют и функции получения дополнительной информации о средствах навигации, правилах плавания, станциях обслуживания мореплавателей, районах маршрутизации движения, взаимодействующих с судовыми транспондерами береговых станциях контроля движения, системах управления движением на подходах к портам и т. д.
3. Счисление, обсервации, прокладка пути.
Для возможности счисления пути и выполнения обсерваций к ECDIS подключаются датчики информации. ECDIS может работать со всеми существующими компасами, лапши, приемниками спутниковых систем GPS (DGPS) и ГЛОНАСС, позиционных систем наземного базирования LORAN-C или DECCA, предоставляющими информацию в соответствии с протоколом IEC 61162-1. Поступающая информация используется для расчета и отображения данных об истинной позиции, скорости и курсе судна, параметрах прохождения маршрута.
В ECDIS обеспечивается выбор позиционных систем для определения мести, одной системы (GPS, DGPS, ГЛОНАСС, DECCA, LORAN-C) или нескольких систем позиционирования одновременно (гибридный режим) с целью повышения надежности определений.
Имеется функция получения обсерваций по вводимым вручную значениям пеленгов и дистанций навигационных ориентиров.
Основной задачей, решаемой на электронной карте, является исполнительная прокладка, которая обычно ведется с непрерывными определениями места судна по GPS. При решении этой задачи и производится индикация цифровых данных, характеризующих процесс движения судна. Отображаются: судовое время (SHT или ST), координаты судна, путевой угол (COG), курс (HDG), путевая скорость (SOG), скорость по лагу (LOG), величина предстоящего изменения скорости и курса, и т. д. Навигационная информация обновляется раз в секунду и отображается как в численном виде, так и непосредственно на карте. Имеется операция оптимизации отображаемых данных,позволяющая судоводителю устанавливать набор данных, отображение которого соответствует условиям плавания.
На экране дисплея ECDIS возможен показ намеченного пути: основного и/или альтернативного запланированного маршрута. Предоставляются операции для модификации основного намеченного пути в процессе плавания или изменения его на альтернативный.
Реализована в ECDIS функция для отображения на карте действительного пути судна за тот или иной промежуток времени с отметками положения судна на определенные моменты времени, интервал между которыми может выбираться судоводителем от 1 мин и больше. Имеется операция оперативной отметки положения судна на линии пути и возможно внесение особых отметок судоводителем.
При прокладке может производиться прогнозирование положения судна на будущие моменты времени и осуществляться просмотр районов на пути следования.
ECDIS предусматривает основной и запасной режимы прокладки пути. В основном режиме прокладки ECDIS может использовать данные:
• Относительного и абсолютного лагов, гирокомпаса, флюксгейт компаса;
• Автоматических приемоиндикаторов систем GPS, ГЛОНАСС, DECCA, LORAN-C, транспондера A1S, САРП;
• Значения курса и скорости, вручную введенные оператором. При отказе системы позиционирования, выбранной для прокладки пути, ECDIS автоматически переходит на запасной (аварийный) режим счисления.
В некоторых ECDIS реализована возможность параллельной одновременной прокладки пути по данным двух позиционных систем, что позволяет оператору наглядно оценить точность приборов.
4. Контроль прохождения маршрута.
ECDIS ведет непрерывный контроль проводки судна по маршруту. Она представляет судоводителю наименование маршрута и данные, характеризующие его прохождение: маршрутные координаты: расстояние (DTG), пеленг и расчетное время (TTG) движения до ближайшей путевой точки; ожидаемое время прибытия в эту точку (ЕТА), направление на эту точку (WTG), и поправку к текущему курсу для выхода в эту точку (разница между HOG и WTG). Индицируются также текущее направление линии запланированного пути (CUR) и следующее за ним направление (NXT), а также боковое смещение от линии пути (ХТЕ).
Для визуального контроля движения судна по намеченному пути ECDIS позволяет показать на карте допустимые границы маршрута (Clearing lines). ECDIS предупреждает об отклонениях от маршрута, выходящих за заданный предел, а также о подходе к точке поворота, чтобы судоводитель мог заблаговременно подготовиться к маневрированию.
Предусмотрена функция для оперативного изменения маршрута без выхода в раздел «предварительная прокладка».
5. Контроль навигационной безопасности
ECDIS осуществляет контроль безопасности плавания. В некоторых ECDIS программой формируется "Фигура безопасности" (Safety online), которая может быть выведена на индикацию или нет. Реализована функция автоматической подачи сигнала предупреждения при попадании опасного объекта в пределы фигуры безопасности, независимо от того, показывается она на экране или нет. Вырабатывается несколько типов предупреждений. Каждый тип имеет свое поле на панели индикации и сопровождается специальным звуковым сигналом или голосом.
Имеется в ECDIS функция установки ширины полосы движения при плавании по заданному маршруту. В процессе перехода при выходе судна за пределы этой полосы срабатывает сигнализация.
Возможно в ECDIS выделение безопасной глубины и изобаты. Судоводитель может воспользоваться этой функцией для определения на карте областей опасных глубин (т. е. областей с глубиной меньшей или равной глубине безопасности судна). При входе согласно карте судна в область опасных глубин, ECDIS выдаст звуковое предупреждение, сопровождаемое визуальной индикацией. Для предупреждения судоводителя об опасных глубинах к ECDIS также подключается эхолот. Взаимодействие ECDIS с эхолотом осуществляется на основе протокола ГЕС 61162-1. Информация эхолота сохраняется системой и может быть выведена на экран в виде кривой рельефа дна.
Для обращения внимания судоводителя и возможности принятия им своевременных мер предосторожности в ECDIS предусмотрены автоматические предупреждения о вхождении судна в районы с особыми условиями плавания.
Для контроля процесса движения судна по моментам достижения им определенного положения относительно той или иной характерной точки на местности (ориентира, опасности, элемента побережья и др.) возможна постановка маркеров событий. Выбранная на карте точка обозначается специальной отметкой (маркером). Судоводитель может выбрать следующие условия взаимного расположения судна и маркера: достижение заданного пеленга, сближение на заданную дистанцию, удаление на определенное расстояние, достижение судном траверза. После того, как произошло описанное событие, ECDIS подаст звуковое и визуальное предупреждение.
Предусматривается контроль точности навигации. Возможно предвычисление погрешности обсерваций по различным позиционным системам (ЕРЕ - expected position error) с показом на экране ее границ, сравнение данных нескольких позиционных средств, выявление грубых определений на основе сравнения обсервации с предвычисленным по счислению местом и с обсервациями по другой независимой позиционной системе. Выполняется контроль качества информации поступающей от различных датчиков.
Функции работы с пользовательскими слоями информации позволяют судоводителю нанести поверх любой карты дополнительные линии, символы, сектора, текст с целью подъема карты, что способствует повышению безопасности прохождения сложных участков пути.
В ECDIS обеспечивается прием и отображение на экране поступающих от NAVTEX-приемника сообщений (навигационных, метеорологических и ледовых предупреждений, информации об операциях поиска и спасания, метеорологических прогнозов и т. д.).
ECDIS контролирует работу подключенных к ней навигационных устройств и сообщает о неисправности любого из них судоводителю.
6. Функции для использования радиолокационной информации
ECDIS может работать с РЛС, обеспечивая отображение на ЭК первичной радиолокационной (РЛ) информации, которая может быть выведена поверх ЭК. Это облегчает сравнение РЛ-изображения с картой, позволяет установить неточность положения судна, а также обнаружить цели, о которых не было сигнализации при пересечении ими охранной дистанции.
При подключении САРП к ECDIS на ЭК представляются все взятые на сопровождение РЛ-цели как символы с идентификаторами и векторами истинной скорости. Имеются операции для изменения длины векторов экстраполированного перемещения целей, и обеспечивается выбор для отображения векторов истинного или относительного движения.
У отметок целей на ЭК могут выводиться следы их прошлого движения.
Для получения числовых данных движения целей имеется функция "Просмотр формуляров целей", при использовании которой отображаются пеленг, дистанция цели, ее курс и скорость, расстояние и время кратчайшего сближения. Опасные цели выделяются цветом.
В некоторых картографических системах (например NAVI-SAILOR 2400 ECDIS, разработанной фирмой ТРАНЗАС МАРИН) предусмотрен встроенный радар-интегратор с возможностями документировать и накладывать на электронную карту "сырое" РЛ-изображение, выделять, сопровождать и документировать большое количество целей.
В ECDIS реализуются функции для работы с АИС-траиспондером. Эта идентификационная система предназначена для обеспечения судоводителей максимально точной и подробной информацией об обнаруженных целях, имеющих AIS-транспондеры. Помимо сведений о курсе и скорости судна-цели (передаваемых им самим и поэтому точных), система АИС позволяет получить информацию о названии судна, его владельце, тоннаже и размерах, маршруте и типе перевозимого груза. Подобная информация может быть полезна, например, при планировании маневрирования и в ряде других случаев.
Для определения положения и элементов движения собственного судна и контроля безопасности его движения ECDIS предоставляет функции навигационного использования радиолокационной информации. Кинематические параметры собственного судна могут определяться при сопровождении неподвижных точечных объектов и характерных элементов протяженных РЛ-объектов.
Для возможности решения на основе РЛ-информации широкого спектра навигационных задач к ECDIS может подключаться специальный радиолокационно-навигационный модуль (РНМ). РНМ совместно с ECDIS предоставляют средства для отображения полного РЛ-образа акватории поверх электронной карты. Возможность синхронизации обоих изображений в реальном времени и наблюдения РЛ-образа, как совместно с картографическими данными, так и независимо, позволяет судоводителю легко ориентироваться в узкостях и незнакомых районах плавания. Одним из существенных преимуществ совместного использования РИМ и ECDIS является возможность взаимного контроля навигационных и радиолокационных средств в наглядной форме, что качественно повышает степень надежности всегокомплекса.
С помощью РНМ решаются следующие задачи:
обеспечение полной совместимости ECDIS с различными типами приемо-передатчиков радаров ведущих фирм производителей;
формирование цифрового РЛ-образа всей акватории и передача его в ECDIS;
уменьшение влияния на цифровой РЛ-образ помех естественного и искусственного происхождения (от морского волнения, дождя, тумана, низких облаков, снеговых зарядов, соседних РЛС). Для этой цели применяются алгоритмы "scan-to-scan" и "sweep-to-sweep" корреляции. Первый вид корреляции характеризует стохастическую зависимость РЛ-данных, соответствующих последовательным посылкам зондирующих импульсов. "Sweep-to-sweep" корреляцией оценивается зависимость цифровых РЛ-образов, последовательно получаемых при разных оборотах антенны;
оптимальное выделение малоразмерных морских целей на фоне мешающих отражений от береговой черты и портовых сооружений;
селекция РЛ-целей, измерение их координат и определение кинематических параметров;
реализация устойчивого к помехам алгоритма обработки видеосигналов целей.
7. Регистрация информации
ECDIS автоматически ведет электронный навигационный журнал и обеспечивает возможность дополнения его оперативньми записями вручную. В электронный журнал автоматически заносятся: сведения о картах, на которых ведется прокладка, данные о корректурах к ним, кинематические параметры своего судна, элементы движения радиолокационных целей, информация об изменении состояния ECDIS и подключенных к ней устройств, параметры движения судна по маршруту.
При ведении судового журнала ECDIS обычно записывает данные только взятых оператором на автосопровождение целей. ECDIS, снабженная специальным целевыделителем, может записывать кинематические параметры всех судов-целей, находящихся в зоне обзора, независимо от того, взяты они оператором на автосопровождение или нет.
Возможен просмотр электронного журнала и воспроизведение обстоятельств плавания на электронной карте в реальном или ускоренном масштабах времени на основе журнальных сведений. Информация электронного судового журнала может быть распечатана на принтере.
Следует отметить, что на современном этапе в электронном журнале детально сохраняются данные о процессе судовождения за определенный до текущего момента времени интервал, достаточный для выяснения причин возможной аварийной ситуации. Этот интервал времени составляет не менее 12 часов. Кинематические параметры нашего судна и судов-целей фиксируются в нем через промежуток времени, не больший 1 минуты. За остальное прошедшее время рейса записи в журнале сохраняются через больший интервал времени. В перспективных разработках ECDIS обращается внимание на возможность детального сохранения всей навигационной информации за рейс с возможностью проигрывания любого участка перехода при его анализе на борту судна или в судоходной компании.
Электронный судовой журнал - это своего рода "черный ящик", который позволяет воспроизвести хронологию событий на любой момент времени. Однако на современном этапе записи электронного судового журнала не имеют юридической силы.
8. Предоставление дополнительной информации.
Для ускорения поиска и представления судоводителю сведений, необходимых при выполнении им своих обязанностей, ECDIS снабжается базами данных из навигационных пособий и средствами Для работы с этими базами. Так как требуемая информация обычно связана с объектом или районом карты, то получение ее в ECDIS организуется с помощью наведения курсора на элемент карты, к которому относятся запрашиваемые судоводителем сведения.
При наличии соответствующих баз данных таким образом быстро могут быть получены сведения об огнях и знаках, радиотехнических средствах, правилах плавания, течениях, приливо—отливных явлениях, портах и портовых службах, обслуживающих мореплавателей станциях и др.
Для того, чтобы судоводитель мог составить представление о качестве карты, в ECDIS имеется возможность представлять сведения о карте (легенду): дату первого издания, дату большой корректуры, номер карты и ее название, оригинальный масштаб, вид проекции, горизонтальный и вертикальный датумы.
В память ECDIS могут вводиться данные о маневренных характеристиках судна в форме, предусмотренной ИМО. Эта информация может при необходимости представляться судоводителю и использоваться при решении задач маневрирования.
9. Решение дополнительных задач.
Из специальных задач наиболее распространенными в ECDIS являются предвычисление высот приливов с построением графика и расчет элементов приливо-отливных течений. Оператор может предвычислять приливы только для пунктов, данные которых хранятся во внутренней базе данных. Это могут быть пункты всего Мирового океана, либо отдельных районов, в которых эксплуатируется судно, Элементы приливо-отливных явлений могут рассчитываться на сутки или несколько суток. В поле графика прилива при помощи курсора можно выделить интервал времени, в котором величина прилива будет менее допустимой.
Некоторые реализуемые в ECDIS программы расчета приливо-отливных явлений предусматривают возможность добавления новых контрольных пунктов, удаление существующих и редактирование данных. Поскольку расчеты приливо-отливных явлений производятся по гармоническим постоянным, то при добавлении и редактировании данных контрольных пунктов оператору необходимо ввести гармонические постоянные в базу данных. Гармонические постоянные для различных пунктов приводятся в Адмиралтейских таблицах приливов.
Кроме расчета приливо-отливных явлений ECDIS может решать задачи, связанные с штормованием судна, плаванием в условиях мелководья, производить расчет освещенности на переходе и т. д. Для производства различного рода вычислений ECDIS снабжается функциями электронного калькулятора.
10. Поддержание баз данных на уровне современности и обмен данными.
Для поддержания баз данных на уровне современности ECDIS снабжается функциями электронной почты, позволяющей через сеть Интернет по каналам системы Инмарсат запрашивать и получать необходимую информацию: корректуры к картам и пособиям, новые карты и другие данные.
Возможен через электронную почту экспорт/импорт данных маршрута. Например, используя эту функцию, судоводитель может осуществлять обмен данными маршрутов между различными судами. Другой возможностью является обмен данными маршрутов между ECDIS и внешними навигационными устройствами. Например, экспорт данных маршрута из GPS-приемника в ECDIS.
По электронной почте может также производиться передача данных электронного судового журнала на другое судно, создание архивов записей, предоставление информации о движении судна сторонним организациям и т. п.
ECDIS также имеет функции для обновления информации вручную. Для внесения оператором срочной корректуры, не дожидаясь ее официального получения по каналам связи, для учета корректур, получаемых от местных представительных служб и построения на карте дополнительных элементов, связанных с подъемом карты в навигационном отношении, ECDIS снабжаются картографическим редактором. Картографический редактор имеет набор инструментов, с помощью которых можно, используя пользовательские слои, наносить на карту различные символы, линии, площади, текст, производить заливку замкнутых фигур цветом и пр.
Операции ручной корректуры просты в работе и могут быть выполнены непосредственно в море. ECDIS учитывает объекты ручной корректуры при решении задач обеспечения навигационной безопасности.
11. Управление движением судна.
ECDIS может работать в режиме управления движением судна по маршруту. Для этой цели предусматривается возможность подключения к ECDIS авторулевого. ECDIS работает с авторулевым на основе протокола IЕС 61162-1. Взаимодействуя с авторулевым. ECDIS обеспечивает выполнение функций управления движением судна:
Мобилизацию центра массы судна на отрезке маршрута, выполнение поворотов запланированным образом, плавание вдоль проложенного маршрута или же к временной путевой точке.
В системах, реализующих автоматическое управление движением судна по маршруту, авторулевой должен быть адаптивным и способным автоматически выполнять повороты при переходе на новый отрезок пути по предварительно заданным значениям радиуса или угловой скорости поворота.
При нарушении в ECDIS функции удержания судна на маршруте, система должна подать тревожный сигнал, отключить функцию автоматического управления движением судна по маршруту и перевести авторулевой в режим стабилизации курса. Если нарушение этой функции происходит при плавании по отрезку маршрута, авторулевой должен перейти на удержание курса, соответствующего направлению активного отрезка пути. Если нарушение происходит во время осуществления поворота, то его выполнение должно быть доведено до конца, после чего авторулевой должен перейти в режим стабилизации курса, соответствующего направлению нового отрезка пути.
12. Другие функции.
ECDIS может выполнять и другие функции, ряд из них характеризуется ниже.
Функции измерений позволяют с помощью курсора определить географические координаты любой точки на карте; пеленг (курсовой угол) и дистанцию между текущим местом судна или выбранной оператором точкой и точкой, указываемой курсором.
Функция "Человек за бортом" - фиксирует место падения человека на карте и выдает на индикацию координаты этого места и все необходимые сведения для поиска человека.
Функции планирования и обеспечения операций поиска и спасания - используются для организации и проведения поисково-спасательных операций на море как индивидуально (одним судном), так и в составе группы судов. Организация операции заключается в расчете маршрута/маршрутов движения судов с учетом квадрата поиска, видимости и т. п. Расчет маршрутов движения ведется на основе рекомендаций MERSAR и IMOSAR, изданных Международной гидрографической организацией.
Функции трехмерного моделирования рельефа дна обеспечивают судоводителю возможность ознакомления с изображением профиля рельефа дна в виде "объемного" изображения. Источниками информации для построения профиля служат данные карты и эхолота.
Возможными областями применения этих функций являются: маневрирование в условиях сложного рельефа дна, проведение гидрографических операций и промысловых работ и т. д.
Функции обучения работе с ECDIS и тренажа. В памяти ECDIS может помещаться программа для обучения работе с ECDIS с примерами использования ее функций. В ряде систем может моделироваться процесс проводки судна в различных районах с предоставлением судоводителю возможности использования функций ECDIS с целью обучения и тренажа. Оператором может быть выбрана карта, помещено на ней свое судно, заданы его элементы движения, нанесены на карту условные цели и заданы их курс и скорость.
Контрольные вопросы:
1. ЭКНИС -это?
2. От полноты информации ЭНК бывают??
3. Режимы ЭКНИС?








Вебинар для учителей

Свидетельство об участии БЕСПЛАТНО!

